基于模糊干擾觀測(cè)器的電液伺服位置系統(tǒng)自適應(yīng)反步控制
2019-01-17 06:14:56劉樂藺明浩李曉剛方一鳴
電機(jī)與控制學(xué)報(bào) 2019年12期
劉樂 藺明浩 李曉剛 方一鳴

摘要:針對(duì)具有輸入飽和的非對(duì)稱缸電液伺服系統(tǒng)的位置跟蹤控制問題,本文提出一種基于模糊干擾觀測(cè)器的自適應(yīng)動(dòng)態(tài)面反步控制方法。首先,為便于系統(tǒng)控制器的設(shè)計(jì),將系統(tǒng)模型等價(jià)轉(zhuǎn)化為嚴(yán)格的反饋形式,并考慮了伺服閥控制信號(hào)存在的輸入飽和問題;其次,通過構(gòu)造模糊干擾觀測(cè)器對(duì)系統(tǒng)中由參數(shù)攝動(dòng)、負(fù)載擾動(dòng)等構(gòu)成的復(fù)合干擾進(jìn)行了觀測(cè)估計(jì);再次,將反步控制與動(dòng)態(tài)面控制相結(jié)合完成了非對(duì)稱缸電液伺服位置系統(tǒng)控制器的設(shè)計(jì),有效地增強(qiáng)了系統(tǒng)的魯棒穩(wěn)定性,并解決了反步控制中的“計(jì)算膨脹”問題;穩(wěn)定性分析結(jié)果表明,閉環(huán)系統(tǒng)的所有信號(hào)均一致最終有界。最后,基于某650 mm冷帶軋機(jī)電液伺服系統(tǒng)的實(shí)際數(shù)據(jù)進(jìn)行了仿真對(duì)比研究,仿真結(jié)果驗(yàn)證了本文所提方法的有效性。
關(guān)鍵詞:電液伺服位置系統(tǒng);非對(duì)稱缸;輸入飽和;模糊干擾觀測(cè)器;動(dòng)態(tài)面控制;自適應(yīng)反步控制
DOI:10.15938/j.emc.(編輯填寫)
中圖分類號(hào):TP273文獻(xiàn)標(biāo)志碼:A文章編號(hào):1007-449X(2016)00-0000-00(編輯填寫)
Abstract:For the position tracking control problem of electro-hydraulic servo system of asymmetric cylinder with input saturation, an adaptive dynamic surface backstepping control strategy is proposed based on the fuzzy disturbance observers. Firstly, to facilitate the design of system controller, the system model was transformed into a strict feedback formequivalently, and the input saturation problem of servo valve's control signal was also considered. Secondly, the compound disturbances, which are composed of parameters perturbation, load disturbance and so on, were estimated by constructing the fuzzy disturbance observers. Thirdly, the controller for the electro-hydraulic servo position system of asymmetric cylinder was designed by combining the backstepping control with the dynamic surface control, which enhanced the robust stability of the system, and solved the “calculation inflation” problem during using the backstepping control effectively. Stability analysis showed that all signals of the closed loop system are uniformly ultimately bounded. Finally, simulation comparative research was conducted by using the actual data of a 650 mm cold strip rolling mill's electro-hydraulic servo system, and simulation results verified the effectiveness of the proposed control strategy.
Keywords: electro-hydraulic servo position system; asymmetric cylinder; input saturation; fuzzy disturbance observer; dynamic surface control; adaptive backstepping control
0 引言
電液伺服系統(tǒng)具有響應(yīng)速度快、承載能力強(qiáng)、控制精度高等優(yōu)點(diǎn),在工農(nóng)業(yè)、國(guó)防軍工、航空航天等領(lǐng)域有著廣泛應(yīng)用[1 - 3]。然而在實(shí)際應(yīng)用中,電液伺服系統(tǒng)的許多參數(shù),如流量系數(shù)、泄漏系數(shù)等存在攝動(dòng),系統(tǒng)的負(fù)載存在擾動(dòng),這些因素都增加了控制器設(shè)計(jì)的難度;另外,電液伺服系統(tǒng)中還存在著伺服閥控制信號(hào)的輸入飽和問題,這不僅影響系統(tǒng)的動(dòng)態(tài)品質(zhì),降低系統(tǒng)的控制性能,甚至?xí)斐上到y(tǒng)不穩(wěn)定。
關(guān)于電液伺服位置系統(tǒng)的基礎(chǔ)理論研究可分成如下兩個(gè)方面:一是對(duì)稱缸電液伺服系統(tǒng)的位置跟蹤控制。文獻(xiàn)[4]利用反饋線性化理論實(shí)現(xiàn)了電液伺服系統(tǒng)的線性化,并在此基礎(chǔ)上設(shè)計(jì)了位置跟蹤反步控制器,然而該控制器設(shè)計(jì)方法假設(shè)系統(tǒng)模型是精確已知的,而沒有考慮系統(tǒng)參數(shù)的攝動(dòng)問題;文獻(xiàn)[5]針對(duì)電液伺服系統(tǒng)中存在的不確定參數(shù),利用回歸最小二乘法對(duì)其進(jìn)行在線估計(jì),并基于輸出的估計(jì)值完成了間接自適應(yīng)反步控制器的設(shè)計(jì),然而該控制器設(shè)計(jì)方法未考慮伺服閥控制信號(hào)存在的輸入飽和問題;文獻(xiàn)[6]考慮電液伺服系統(tǒng)中伺服閥存在的控制輸入飽和問題,提出了一種具有 增益的魯棒抗飽和多模型切換控制策略,保證了在輸入受限情況下電液伺服系統(tǒng)的穩(wěn)定性。二是非對(duì)稱缸電液伺服系統(tǒng)的位置跟蹤控制。針對(duì)非對(duì)稱缸電液伺服系統(tǒng)中存在的參數(shù)攝動(dòng)和外部擾動(dòng)等問題,文獻(xiàn)[7]首先將電液伺服位置系統(tǒng)的非線性模型線性化,而后完成了 魯棒控制器的設(shè)計(jì),該控制器設(shè)計(jì)方法簡(jiǎn)化了控制器的設(shè)計(jì)過程,提高了系統(tǒng)的抗干擾能力;文獻(xiàn)[8]提出了一種基于積分型Lyapunov函數(shù)的自適應(yīng)反步控制方法,并在搭建的AMESim與MATLAB聯(lián)合仿真平臺(tái)上驗(yàn)證了所提算法的有效性;文獻(xiàn)[9]對(duì)含有確定、不確定,已知、未知,線性和非線性項(xiàng)的電液伺服系統(tǒng)進(jìn)行了建模,并提出了一種自適應(yīng)魯棒控制器設(shè)計(jì)方法,使得系統(tǒng)的所有狀態(tài)在任意給定條件下都能收斂到理想狀態(tài)。然而文獻(xiàn)[7-9]中的控制器設(shè)計(jì)方法均未充分考慮伺服閥控制信號(hào)存在的輸入飽和問題,以及控制器推導(dǎo)設(shè)計(jì)過程中存在的“計(jì)算膨脹”問題。
考慮到反步法[10]是一種簡(jiǎn)單、有效的控制器設(shè)計(jì)方法,尤其是針對(duì)具有嚴(yán)格反饋形式的非線性系統(tǒng)。然而在反步控制器的推導(dǎo)過程中需要對(duì)虛擬控制量重復(fù)微分,若系統(tǒng)的階次較高,則會(huì)使控制器的復(fù)雜性隨著系統(tǒng)階次的增加呈爆炸式增長(zhǎng),即出現(xiàn)“計(jì)算膨脹”問題。而動(dòng)態(tài)面控制方法[11]通過構(gòu)造低通濾波器對(duì)反步控制中每一步的虛擬控制量進(jìn)行估計(jì),可有效解決反步控制中的“計(jì)算膨脹”問題,并簡(jiǎn)化控制器的設(shè)計(jì)過程。此外,模糊干擾觀測(cè)器[12]可對(duì)系統(tǒng)的干擾不確定項(xiàng)進(jìn)行觀測(cè)估計(jì),且無(wú)需對(duì)其做任何限制,因而降低了控制器設(shè)計(jì)的保守性。
基于上述分析,本文采用模糊干擾觀測(cè)器和自適應(yīng)動(dòng)態(tài)面反步控制方法,研究具有輸入飽和的非對(duì)稱缸電液伺服系統(tǒng)的位置跟蹤控制問題。首先,將系統(tǒng)模型等價(jià)轉(zhuǎn)化為嚴(yán)格的反饋形式,以便于系統(tǒng)控制器的設(shè)計(jì),同時(shí)考慮電液伺服閥由于閥門開度有限而存在的輸入飽和問題,以確保系統(tǒng)的控制性能和動(dòng)態(tài)品質(zhì);其次,通過構(gòu)造模糊干擾觀測(cè)器對(duì)由系統(tǒng)參數(shù)攝動(dòng)、負(fù)載擾動(dòng)和超出控制輸入限幅部分構(gòu)成的復(fù)合干擾進(jìn)行觀測(cè)估計(jì),并將輸出的觀測(cè)值引入到而后設(shè)計(jì)的控制器中進(jìn)行補(bǔ)償,以提高系統(tǒng)的跟蹤控制精度;再次,將反步控制與動(dòng)態(tài)面控制相結(jié)合完成非對(duì)稱缸電液伺服位置系統(tǒng)控制器的設(shè)計(jì),以增強(qiáng)系統(tǒng)的抗干擾性能,簡(jiǎn)化系統(tǒng)控制器的設(shè)計(jì)過程,并解決反步控制中的“計(jì)算膨脹”問題。最后,以某650 mm冷帶軋機(jī)電液伺服位置系統(tǒng)為例進(jìn)行仿真研究,并同未采用模糊干擾觀測(cè)器的反步控制方法及常規(guī)的PI控制方法相比較,驗(yàn)證本文所提方法能夠有效削弱輸入飽和對(duì)系統(tǒng)性能的影響,并具有較好的動(dòng)態(tài)性能和穩(wěn)態(tài)精度。
1 電液伺服位置系統(tǒng)的數(shù)學(xué)模型及控制問題提出
1.1 電液伺服位置系統(tǒng)的數(shù)學(xué)模型
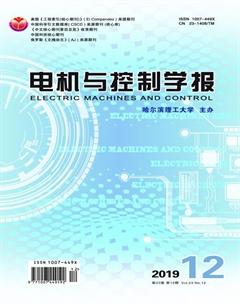
液壓缸是電液伺服位置系統(tǒng)的重要組成部分,其作用是通過缸體活塞的移動(dòng)來驅(qū)動(dòng)負(fù)載運(yùn)動(dòng)。閥控非對(duì)稱液壓缸的原理圖如圖1所示。
軋機(jī)電液伺服位置系統(tǒng)的響應(yīng)曲線如圖3所示。由圖3(a)可以看出:與未采用模糊干擾觀測(cè)器的反步控制方法及常規(guī)的PI控制方法相對(duì)比,軋機(jī)電液伺服位置系統(tǒng)在本文所提控制方法的作用下動(dòng)態(tài)響應(yīng)較快,穩(wěn)態(tài)精度較高,抗干擾能力較好。由圖3(b)-3(c)可以看出:所設(shè)計(jì)模糊干擾觀測(cè)器對(duì)系統(tǒng)的復(fù)合干擾 和 均進(jìn)行了觀測(cè)估計(jì),有效地提高了系統(tǒng)的跟蹤控制精度(結(jié)合由圖3(a)可見)。
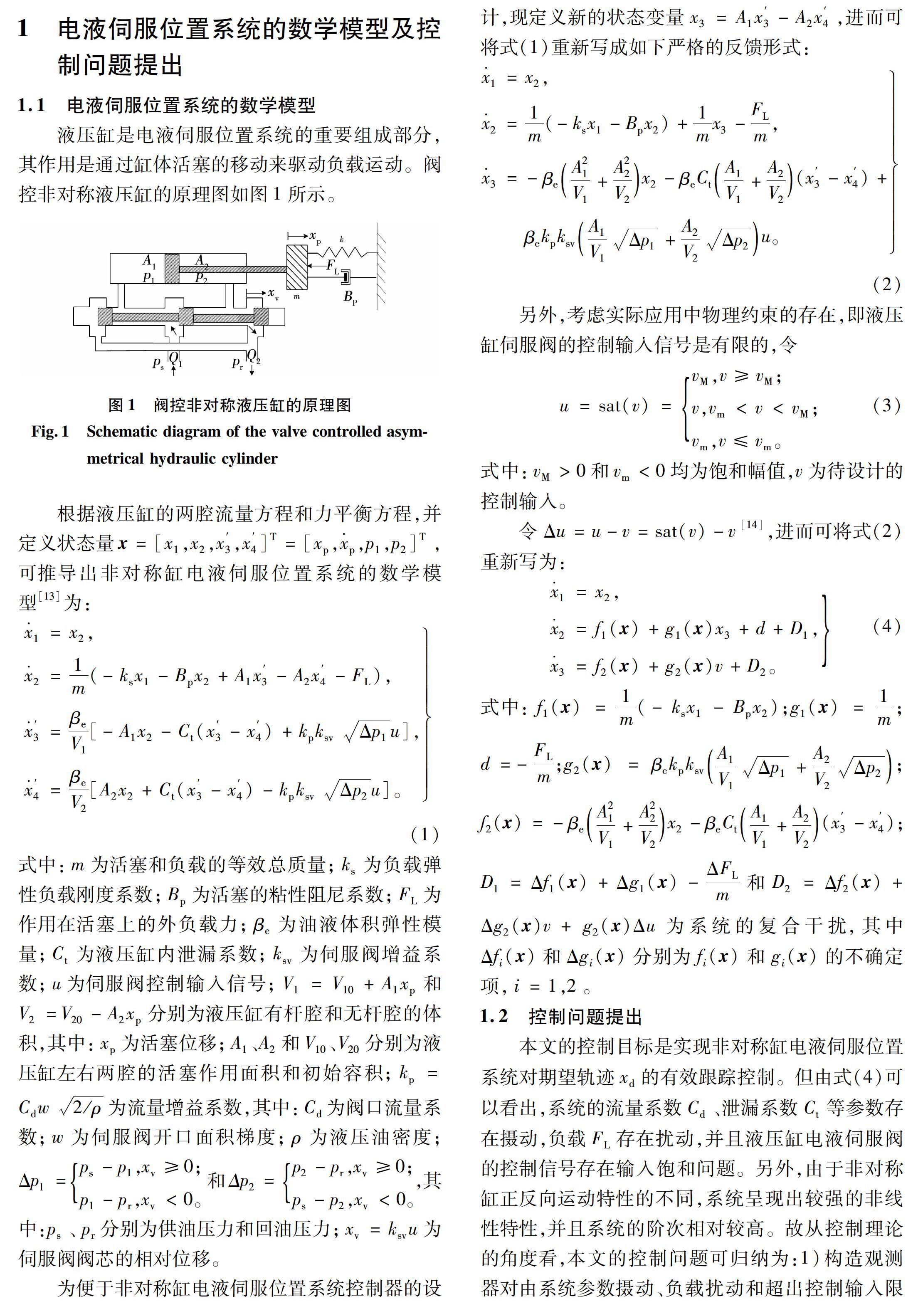
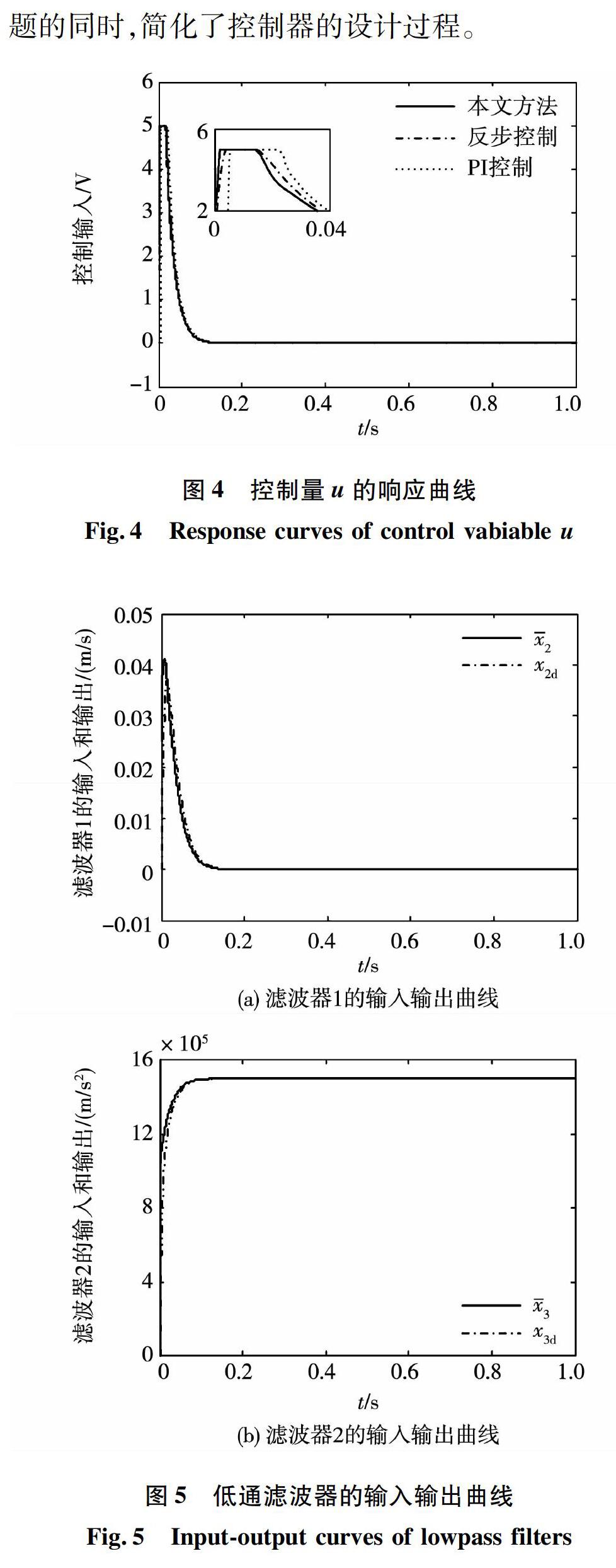
圖4為控制量u的響應(yīng)曲線,可以看出:本文所提控制方法能較快地退出飽和。圖5為低通濾波器的輸入輸出曲線,可以看出:所設(shè)計(jì)的低通濾波器對(duì)反步控制中每一步的虛擬控制量 均進(jìn)行了有效地估計(jì),從而在解決反步控制中“計(jì)算膨脹”問題的同時(shí),簡(jiǎn)化了控制器的設(shè)計(jì)過程。
5 結(jié)論
本文基于模糊干擾觀測(cè)器和自適應(yīng)動(dòng)態(tài)面反步控制方法研究了具有輸入飽和的非對(duì)稱缸電液伺服系統(tǒng)的位置跟蹤控制問題。首先,將系統(tǒng)模型等價(jià)轉(zhuǎn)化為嚴(yán)格的反饋形式,并考慮了在實(shí)際應(yīng)用中伺服閥控制信號(hào)存在的輸入飽和問題,在方便設(shè)計(jì)系統(tǒng)控制器的同時(shí),確保系統(tǒng)的控制性能;其次,通過構(gòu)造的模糊干擾觀測(cè)器對(duì)系統(tǒng)中由攝動(dòng)參數(shù)、負(fù)載擾動(dòng)和超出控制輸入限幅部分構(gòu)成的復(fù)合干擾進(jìn)行了觀測(cè)估計(jì),并將輸出的觀測(cè)值引入到而后設(shè)計(jì)的控制器中進(jìn)行補(bǔ)償,有效地提高了系統(tǒng)的跟蹤控制精度;再次,將反步控制與動(dòng)態(tài)面控制相結(jié)合完成非對(duì)稱缸電液伺服位置系統(tǒng)控制器的設(shè)計(jì),該控制器的抗干擾能力較強(qiáng),控制參數(shù)易于整定,有效地解決了反步控制中的“計(jì)算膨脹”問題,并簡(jiǎn)化了控制器的設(shè)計(jì)過程;通過理論分析證明了本文所提方法能夠保證閉環(huán)系統(tǒng)的所有信號(hào)是一致最終有界的。最后,基于某650 mm冷帶軋機(jī)電液伺服系統(tǒng)的實(shí)際數(shù)據(jù),將本文所提方法同未采用模糊干擾觀測(cè)器的反步控制方法及常規(guī)的PI控制方法進(jìn)行了仿真對(duì)比研究,仿真結(jié)果表明:非對(duì)稱缸軋機(jī)電液伺服位置系統(tǒng)在本文所提方法的作用下,不但對(duì)期望的位置信號(hào)進(jìn)行了有效地跟蹤控制,削弱了輸入飽和對(duì)系統(tǒng)性能的影響,而且具有較好的動(dòng)態(tài)性能和穩(wěn)態(tài)精度。
參考文獻(xiàn):
[1] 邵璇, 張永德, 孫桂濤, 等. 液壓機(jī)器人關(guān)節(jié)力補(bǔ)償控制研究[J]. 電機(jī)與控制學(xué)報(bào), 2018, 22(9): 98-103.
SHAO Xuan, ZHANG Yongde, SUN Guitao, et al. Hydraulic robot joint force compensation control [J]. Electric Machines and Control, 2018, 22(9): 98-103.
[2] 孫浩, 高強(qiáng), 劉國(guó)棟, 等. 某同源平衡及定位電液伺服系統(tǒng)模糊分?jǐn)?shù)階PID控制[J]. 火力與指揮控制, 2017, 42(7): 61-65, 71.
SUN Hao, GAO Qiang, LIU Guodong, et al. A homologous balance and positioning servo system of fuzzy fractional order PID control [J]. Fire Control & Command Control, 2017, 42(7): 61-65, 71.
[3] 左希慶, 阮健, 孫堅(jiān), 等. 基于擠壓油膜理論的二維電液壓力伺服閥穩(wěn)定性分析[J]. 中國(guó)機(jī)械工程, 2017, 28(5): 537-543.
ZUO Xiqing, RUAN Jian, SUN Jian, et al. Stability analysis of 2D electro-hydraulic pressure servo valve based on squeeze film theory [J]. China Mechanical Engineering, 2017, 28 (5): 537-543.
[4] Ursu L, Toader A, Halanay A, et al. New stabilization and tracking control laws for electro-hydraulic servomechanism [J]. European Journal of Control, 2013, 19(1): 65-80.
[5] Kaddissi C, Kenne J, Saad M. Indirect adaptive control of an electro-hydraulic servo system based on nonlinear backstepping [J]. IEEE Transactions on Mechatronics, 2011, 16(6): 1171-1177.
[6] 王志杰, 方一鳴, 李葉紅, 等. 輸入受限的軋機(jī)液壓伺服系統(tǒng)多模型切換控制[J]. 儀器儀表學(xué)報(bào), 2013, 34(4): 881-888.
WANG Zhijie, FANG Yiming, LI Yehong, et al. Multi-model switching control for rolling mill hydraulic servo system with input constrains [J]. Chinese Journal of Scientific Instrument. 2013, 34 (4): 881-888.
[7] Milic V, Situm Z, Essert M. Robust ?position control synthesis of an electro-hydraulic servo system [J]. ISA Transactions, 2010, 49(4): 535-542.
[8] 林浩, 李恩, 梁自澤. 具有非線性不確定參數(shù)的電液伺服系統(tǒng)自適應(yīng)backstepping控制[J]. 控制理論與應(yīng)用, 2016, 33(2): 181-188.
LIN Hao, LI En, LIANG Zize. Adaptive backstepping controller for electro-hydraulic servo system with nonlinear uncertain parameters [J]. Control Theory & Applications, 2016, 33(2): 181-188.
[9] 陳光榮, 王軍政, 汪首坤, 等. 自適應(yīng)魯棒控制器設(shè)計(jì)新方法在電液伺服系統(tǒng)中的應(yīng)用[J]. 自動(dòng)化學(xué)報(bào), 2016, 42(3): 375-384.
CHEN Guangrong, WANG Junzheng, WANG Shoukun, et al. Application of a new adaptive robust controller design method to electro-hydraulic servo system [J]. Acta Automatica Sinica, 2016, 42(3): 375-384.
[10] 劉樂, 李智, 方一鳴, 等.伺服電機(jī)驅(qū)動(dòng)連鑄結(jié)晶器振動(dòng)位移系統(tǒng)滑模控制[J]. 電機(jī)與控制學(xué)報(bào), 2016, 20(12): 101-108.
LIU Le, LI Zhi, FANG Yiming, et al. Sliding-mode control of continuous cast mold oscillation displacement system driven by servo motor [J]. Electric Machines and Control, 2016, 20(12): 101-108.
[11] 朱齊丹, 馬俊達(dá), 劉可.基于擾動(dòng)觀測(cè)器的無(wú)人水面船魯棒軌跡跟蹤[J]. 電機(jī)與控制學(xué)報(bào), 2016, 20(12): 65-73.
ZHU Qidan, MA Junda, LIU Ke. A nonlinear disturbance observer based on robust approach to the trajectory tracking of an unmanned surface vehicle [J]. Electric Machines and Control, 2016, 20(12): 65-73.
[12] Kang H S, Lee Y, Hyun C H, et al. Design of sliding-mode control based on fuzzy disturbance observer for minimization of switching gain and chattering [J]. Soft Computing, 2015, 19(4): 851-858.
[13] 方一鳴, 許衍澤, 李建雄. 具有輸入飽和的電液伺服位置系統(tǒng)自適應(yīng)動(dòng)態(tài)面控制[J]. 控制理論與應(yīng)用, 2014, 31(4): 511-518.
FANG Yiming, Xu Yanze, LI Jiangxiong. Adaptive dynamic surface control for electro-hydraulic servo position system with input saturation [J]. Control Theory & Applications, 2014, 31(4): 511-518.
[14] Lu K F, ?Xia Y Q, Fu M Y. Controller design for rigid spacecraft attitude tracking with actuator saturation [J]. Information Sciences, 2013, (220): 343-366.
[15] Chen M, Chen W H, Wu Q X. Adaptive fuzzy tracking control for a class of uncertain MIMO nonlinear systems using disturbance observer [J]. Science China Information Sciences, 2014, 57(1): 1-13.