噪音環(huán)境下人聲提取設(shè)備的硬件設(shè)計(jì)
2019-01-17 04:33:10卿桂玲李東山周建梅
鋒繪 2019年12期
關(guān)鍵詞:數(shù)據(jù)采集
卿桂玲 李東山 周建梅
摘 要: 火災(zāi)隱患在生活在無(wú)處不在,當(dāng)火情發(fā)生時(shí)首要保證的是及時(shí)轉(zhuǎn)移出被困人員,其中能否快速確定被困者的位置成為搜救工作的關(guān)鍵。而火災(zāi)現(xiàn)場(chǎng)情況極為復(fù)雜,搜救人員無(wú)法及時(shí)做出判斷,針對(duì)于此設(shè)計(jì)一種基于麥克風(fēng)陣列聲源定位的火災(zāi)尋人設(shè)備。此設(shè)備內(nèi)部采用語(yǔ)音識(shí)別算法和聲源定位算法相互配合進(jìn)行人員方位計(jì)算,設(shè)備中的音頻數(shù)據(jù)采集由麥克風(fēng)陣列完成,微控制器對(duì)音頻數(shù)據(jù)進(jìn)行讀取并處理,數(shù)據(jù)處理完成后執(zhí)行算法計(jì)算出聲源位置。再通過(guò)互聯(lián)網(wǎng)將定位信息傳送至移動(dòng)端設(shè)備,由客戶(hù)端顯示被困者的準(zhǔn)確位置。如此進(jìn)行針對(duì)性的救援將會(huì)極大提高搜救效率,并減輕搜救人員工作強(qiáng)度。
關(guān)鍵詞: 樹(shù)莓派;無(wú)線通信;數(shù)據(jù)采集;聲源定位
1 總體設(shè)計(jì)
本設(shè)計(jì)主要由四部分組成:聲音信號(hào)采集模塊、音頻信號(hào)處理模塊、信號(hào)傳輸模塊以及終端顯示單元。
設(shè)計(jì)思路為:由聲音信號(hào)采集模塊,拾取環(huán)境聲音并對(duì)其進(jìn)行預(yù)處理(進(jìn)行降噪,放大),傳輸?shù)揭纛l信號(hào)處理單元再進(jìn)行深度分析:(1)一般環(huán)境:判斷其中是否含有求救人聲信號(hào),如有求救人聲在進(jìn)行人聲提取和聲源定位;(2)復(fù)雜火災(zāi)環(huán)境:判斷其中是否含有人聲信號(hào)或者活體運(yùn)動(dòng)聲音信號(hào),如有直接對(duì)人聲信號(hào)或者活體運(yùn)動(dòng)聲音信號(hào)進(jìn)行聲源定位;再將最終的定位結(jié)果和聲音通過(guò)互聯(lián)網(wǎng)傳輸?shù)浇K端顯示單元。
2 硬件設(shè)計(jì)
2.1 控制器的選取
控制器模塊選擇使用樹(shù)莓派Raspberry Pi 4B,它搭載了ARM Cortex-A72的處理器,Cortex-A72 是ARM性能最出色、最先進(jìn)的處理器。在相同的移動(dòng)設(shè)備電池壽命限制下,Cortex-A72 能相較基于 Cortex-A15 的設(shè)備提供3.5倍的性能表現(xiàn),展現(xiàn)優(yōu)異的整體功耗效率。通過(guò)對(duì)樹(shù)莓派的編程,讓它用作于音頻信號(hào)的分析處理,進(jìn)行人聲識(shí)別和聲源定位,并將最終的結(jié)果通過(guò)數(shù)據(jù)傳輸模塊傳送至互聯(lián)網(wǎng)。
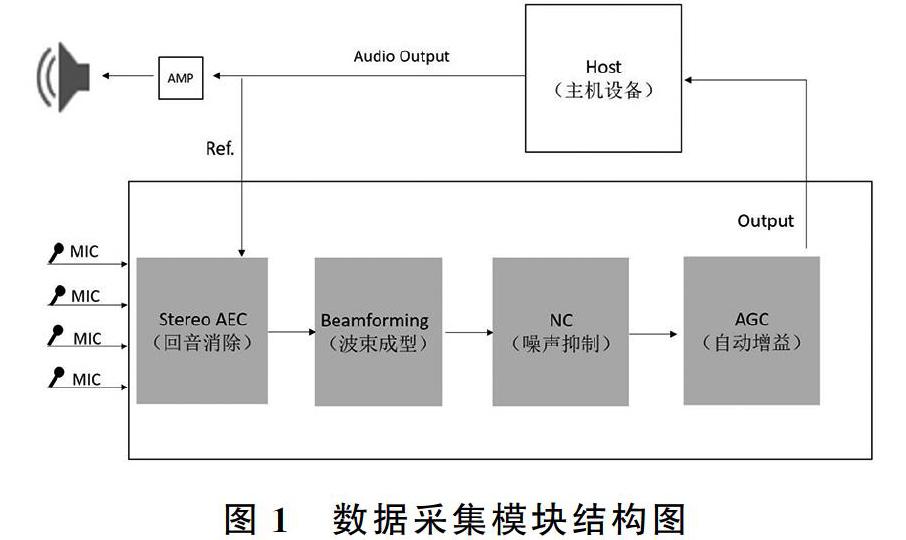
2.2 數(shù)據(jù)采集模塊的設(shè)計(jì)
數(shù)據(jù)采集模塊由聲音信號(hào)拾取,音頻數(shù)據(jù)預(yù)處理,音頻數(shù)據(jù)輸出三部分組成。
聲音信號(hào)拾取裝置使用4個(gè)數(shù)字麥克風(fēng),其特點(diǎn)是低功耗,120dB SPL聲學(xué)過(guò)載點(diǎn),61dB信噪比,全方位的靈敏度,-26dB FS 靈敏度,PDW輸出。
音頻輸出采用WM8960,它是一款低功耗立體聲編解碼器,采用D類(lèi)揚(yáng)聲器驅(qū)動(dòng),可為每個(gè)通道提供1W,總計(jì)8W的負(fù)載。其結(jié)構(gòu)如圖1所示。
2.3 數(shù)據(jù)處理模塊的設(shè)計(jì)
數(shù)據(jù)處理模塊是由樹(shù)莓派與數(shù)據(jù)采集模塊配合完成。它接收數(shù)據(jù)采集端串口傳來(lái)的數(shù)據(jù)進(jìn)行解碼,并對(duì)數(shù)據(jù)進(jìn)行分析。提取出其中的人聲頻率。利用最大輸出功率的可控波束形成方法進(jìn)行定位,其原理是首先比較陣列采集到的不同方向信號(hào)的輸出功率,然后對(duì)其進(jìn)行波束形成,即在某期望方向上成形,使陣列在該方向的功率譜產(chǎn)生一個(gè)峰值,而對(duì)其他非期望方向產(chǎn)生零陷,產(chǎn)生幅值較小的波束。用波束形成的方法對(duì)整個(gè)空間方向進(jìn)行聲源定位,找出功率最大的方向即可確定目標(biāo)聲源的方向角度。
2.4 數(shù)據(jù)傳輸模塊的設(shè)計(jì)
數(shù)據(jù)傳輸是由樹(shù)莓派連接信息數(shù)據(jù)的傳輸設(shè)備EC20 R2.0進(jìn)行傳輸,EC20 R2.0是一款LTE Cat 4無(wú)線通信模塊,采用LTE 3GPP Rel.11 技術(shù),支持最大下行速率150Mbps和最大上行速率50Mbps;可在3G網(wǎng)絡(luò)與4G網(wǎng)絡(luò)之間的無(wú)縫切換。能夠向后兼容現(xiàn)存的EDGE和GSM/GPRS網(wǎng)絡(luò),以確保在缺乏3G和4G網(wǎng)絡(luò)的偏遠(yuǎn)地區(qū)也能正常工作。內(nèi)置多星座高精度定位GNSS(GPS/GLONASS/BeiDou/Galileo/QZSS)接收機(jī);定位速度快,精度高。內(nèi)置豐富的網(wǎng)絡(luò)協(xié)議,集成多個(gè)工業(yè)標(biāo)準(zhǔn)接口。
2.5 終端顯示模塊
終端設(shè)備通常設(shè)置在能利用通信設(shè)施與遠(yuǎn)處計(jì)算機(jī)聯(lián)接工作的方便場(chǎng)所,它主要由通信接口控制裝置與專(zhuān)用或選定的輸入輸出裝置組合而成。通過(guò)終端顯示器上的按鈕,就可以控制整個(gè)機(jī)電系統(tǒng),操作非常簡(jiǎn)單、方便;終端顯示器一般內(nèi)置一組或者兩組通訊端口,可以支持多種通訊協(xié)議;直接控制終端顯示器的按鈕,就可以達(dá)到控制整個(gè)機(jī)電系統(tǒng)的目的,近而提高操作者的工作效率安裝上相應(yīng)的終端軟件就可以對(duì)數(shù)據(jù)實(shí)時(shí)的接收并觀察。
3 總結(jié)
利用麥克風(fēng)陣列單片機(jī)對(duì)聲音信號(hào)進(jìn)行采集和識(shí)別,借助于數(shù)據(jù)傳輸與處理,通過(guò)識(shí)別算法設(shè)計(jì)出一款用于火災(zāi)搜救現(xiàn)場(chǎng)的人聲提取設(shè)備。使該設(shè)備具有火災(zāi)被困人員的聲源實(shí)時(shí)追蹤定位,可以提高火災(zāi)搜救工作的智能化程度、安全系數(shù)和精準(zhǔn)度。
參考文獻(xiàn)
[1]王波.麥克風(fēng)陣列語(yǔ)音增強(qiáng)算法的研究與DSP實(shí)現(xiàn)[D].大連理工大學(xué),2007.
[2]洪萬(wàn)帆,蘇淑靖.基于無(wú)線傳感器網(wǎng)絡(luò)的數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)[J].電子器件,2016,(01).
[3]張召磊,孫曉偉,夏德新,李芳.高精度頻率分辨在振動(dòng)信號(hào)辨識(shí)中的應(yīng)用[J].火箭推進(jìn),2017,(02).
猜你喜歡
現(xiàn)代電子技術(shù)(2016年22期)2016-12-26 12:36:15
電子技術(shù)與軟件工程(2016年22期)2016-12-26 11:11:30
現(xiàn)代電子技術(shù)(2016年22期)2016-12-26 09:44:35
電子技術(shù)與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識(shí)與技術(shù)(2016年27期)2016-12-15 20:42:01
農(nóng)業(yè)與技術(shù)(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國(guó)科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
