基于柵格分析策略的空中航路規劃仿真
2019-01-20 02:41:59劉廣才張竹欣家會臣楊志堅朱斯燕
中國新技術新產品 2019年21期
劉廣才 張竹欣 家會臣 楊志堅 朱斯燕


摘? 要:該文提出一種基于柵格分析策略的空中航路規劃方法,在充分考慮氣象、地理環境、敵情對航路規劃影響的基礎上,對柵格數據做了一系列處理,剔除了應該規避的空域,降低了算法的搜索規模。仿真實驗結果表明,不同的柵格分析策略可以加快航路規劃速度,同時降低不合理航路的出現概率,使規劃路徑更接近最優。
關鍵詞:柵格數據處理;柵格分析;航路規劃
中圖分類號:TP393? ? ? ? ? ? ? 文獻標志碼:A
0 引言
我軍裝備在向信息化深入發展的同時,在智能化、無人化方面也展現出了蓬勃發展的勢頭,其中陸航、固定翼無人飛機、無人直升機發展尤為迅猛,這就給未來戰場的空中機動航路規劃提出了更高的要求。空中航路規劃是陸航低空突防與偵察、無人機自主飛行的關鍵環節,借助計算機在復雜戰場環境下進行空中航路規劃,已備指揮員進行時間和資源的綜合分析與計劃制定,提高指揮決策效率。現階段研究的重點大多放在對航路規劃算法的設計和改造,但空中機動還需要考慮飛機機型、氣象以及地理空間環境對航路規劃的影響,那么就需要依據作戰任務對地理空間環境數據進行處理和區域構建。該文針對地理空間環境數據使用不同維度的柵格分析策略進行處理,并對空中航路規劃算法的影響進行仿真研究。
1 柵格數據分析
1.1 柵格數據模型
柵格數據結構又稱網格結構,是以二維矩陣的形式表達空間地物或現象分布的數據組織方式,即像元陣列,每個像元(圖1)都有給定的屬性值來表示地理實體或地理現象,例如高程值、氣象環境(風、能見度、降水、大霧、風沙、雷暴、氣壓、氣溫等)、敵防御范圍、敵火力覆蓋范圍等。
1.2 柵格數據處理
在進行柵格數據的空間分析之前,往往需要對數據先進行一些處理,以滿足進一步分析的要求。例如將現有的矢量數據轉換為柵格數據,再對柵格數據進行空間分析來獲取更多信息。常用的柵格數據處理包括矢柵轉換、聚合、重分級、重采樣等。
1.2.1 矢柵轉換
由于矢量和柵格數據在地理信息系統應用中各有利弊,因此,有時需要將這2種數據結構進行相互轉化,以便于分析和處理問題。
矢量轉柵格和柵格轉矢量的方法,則采用矢柵轉換參數對象作為參數,將矢量數據集轉換為柵格數據集。柵格轉矢量又稱矢量化,是將柵格單元中的空間信息轉換為幾何圖形的過程。
柵格數據細化處理可以減少柵格數據中用于標識線狀地物的單元格的數量,從而提高矢量化的速度和精度。例如一幅掃描的等高線圖上可能使用5~6個單元格來顯示一條等高線的寬度,細化處理后,等高線的寬度就只用一個單元格來顯示了,如圖2所示。
1.2.2 重分級
柵格重分級(圖3)就是對源柵格數據的像元值進行重新分類和按照新的分類標準賦值,其結果是用新的值取代了柵格數據的原像元值。對于已知的柵格數據,有時為了便于看清趨勢,找出像元值的規律,或者為了方便進一步的分析,重分級是很必要的。
1.2.3 重采樣
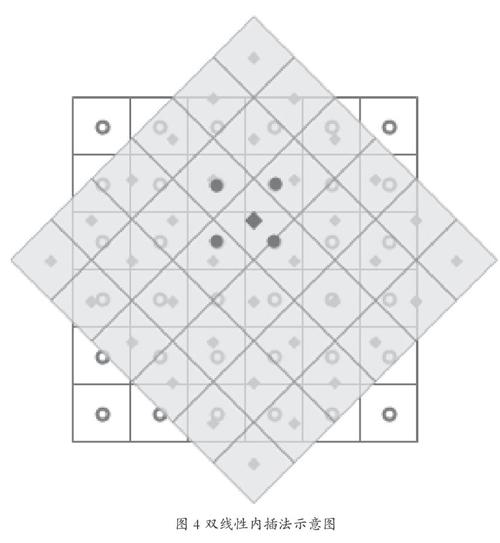
重采樣使用的方法為雙線性內插法,使用內插點在輸入柵格中的4鄰域進行加權平均來計算新柵格值,權值根據4鄰域中每個格子中心距內插點的距離來決定,如圖4所示。圖5所示為柵格數據重采樣結果。
1.3 柵格分析策略
該文提出3種柵格分析策略,分別為無柵格分析、氣象柵格分析、全因素柵格分析,其中無柵格分析策略中將氣象、地形等所有約束條件加入搜索過程中。氣象柵格分析將氣象約束條件加入柵格分析,其余約束條件加入搜索過程,全因素柵格分析將氣象、地形等所有約束條件都加入柵格分析,搜索過程中不加入額外的約束條件。
2 基于柵格分析策略的空中航路規劃算法仿真實驗
2.1 仿真環境
仿真采用VC++6.0平臺來實現。系統環境為Windows10系統。硬件環境為Intel Core i7-7700@3.60GHz。假定環境中采用旋翼無人機,最大飛行速度為75 m/s,轉彎半徑為0.09 km,最大仰角為30°。
2.2 仿真實驗
構建柵格數據分析模型,設置高程、風等級、能見度等級、風沙、雷暴區域、氣壓值,敵方導彈火力覆蓋范圍、地方雷達陣地水平/垂直探測范圍等參數值。
在進行無人機航路規劃時采用3種策略分別為無柵格分析、氣象柵格分析、全因素柵格分析,充分考慮無人機的性能約束條件,同時柵格的大小設置盡量匹配無人機的性能參數,避免影響飛機的空中機動。
設定最小柵格為100m×100m×52m的立方體,將航路規劃區域用若干小立方體進行填充,完成建模。在三維環境中考慮雷達陣地和導彈陣地2個人為因素,進行仿真實驗,對比算法性能。
表1中對比了3種航路規劃策略在不同起點、目標點下的航路規劃用時和航路距離。其中距離單位是柵格,航路67意義為航空器從起點至目標點需經過67個表格。時間單位是s。起點選擇了柵格區域的左上角、右下角、中間3個位置。(1,1)為左上角起點,其目標點選擇了柵格區域的其余3個頂點位置。(29,29)為右下角起點,其目標點選擇了柵格區域的其余3個頂點位置。(14,14)為中間位置起點,其目標點選擇了左上頂點、左下頂點、右側邊界點。
3種規劃策略的仿真結果表明,柵格分析中加入的約束越多,航路越短、航路規劃用時越短。說明了柵格分析在時間維度、最優路徑維度都對航路規劃有利。即在保證約束效果的前提下,既提高了航路規劃效率,又可提高規劃最優路徑的概率。
3 結語
為提高傳統航路規劃算法的規劃效率,該文提出了一種基于柵格分析策略的空中航路規劃方法并對其進行了仿真。仿真結果表明,與無柵格分析的航路規劃算法相比,全因素柵格分析在時間維度、最優路徑維度都對航路規劃有利,這說明柵格分析策略能夠加快搜索用時、提高搜索效率。
參考文獻
[1]辛正偉.航路網絡規劃技術研究[D].南京:南京航空航天大學,2013.
[2]王世錦,公言會,酈晴云.航路網絡規劃技術研究綜述[J].交通信息與安全,2014,32(6):8-14,21.
[3]馮國強,趙曉林,高關根,等.基于A~*蟻群算法的無人機航路規劃[J].飛行力學,2018,36(5):49-52,57.
[4]胡中華,趙敏,姚敏.基于柵格模型及雙層規劃的無人機三維協同輪流攻擊航跡規劃[J].中國電機工程學報,2011,31(36):162-167.
[5]王振華,章衛國,劉小雄,等.基于柵格空間V圖的無人機路徑規劃[J].計算機測量與控制,2009,17(6):1212-1214.
[6]辛正偉.航路網絡規劃技術研究[D].南京:南京航空航天大學,2013.
