助飛式水聲對抗器材落點測量方法及誤差分析
2019-01-28 01:11:04費志剛陳寶柱
船電技術 2019年1期
關鍵詞:測量
黎 陽,費志剛,陳寶柱
?
助飛式水聲對抗器材落點測量方法及誤差分析
黎 陽,費志剛,陳寶柱
(91388部隊92分隊,廣東湛江 524022)
助飛式水聲對抗器材落點精度海上試驗因海況、測量手段等因素限制一直是試驗的重難點問題。本文從分析助飛式水聲對抗器材基本工作原理和其落點精度影響因素入手,即光學定位法、水聲定位法、人工定位法和遙測定位法四種落點精度海上試驗的測量方法。對四種測量方法的優勢、劣勢進行了對比分析,提出了一種基于Matlab軟件的數據處理方法,并對測量結果的誤差進行了對比分析,綜合提出了根據海上試驗環境條件和測量保障條件進行海上試驗的優選原則。
助飛式水聲對抗器材 落點 測量方法 誤差
0 前言
助飛式水聲對抗器材(以下簡稱助飛器材)具有發射距離遠、布放迅速,有利于迅速形成多層次、多手段的對抗配置等優點,擔負著未來海戰中對抗來襲魚雷攻擊的使命任務,助飛器材落點精度是其關鍵指標,影響到整個對抗態勢是否能有效達成,直接導致水下對抗的成敗。助飛器材具有體積小、速度快、散布大等特點,在單機試驗時可在陸上靶場進行飛行試驗,準確測量其落點位置,計算落點精度。助飛器材裝艦后由于受發射裝置誤差、海上實際作戰條件等因素影響,其誤差與單機誤差相比有較大不同。在大型水面艦定型試驗時需在海上測量其落點位置,由于受海況、發射時機、發射參數、測量手段等因素影響,助飛器材落點定位問題一直是試驗的難點問題。通過分析助飛器材落點精度影響因素,提出其試驗方法和誤差估計,優選試驗方案,對于科學考核大型水面艦助飛器材落點精度具有重要的現實意義。
1 落點精度影響因素分析
助飛器材基本的工作原理是在點火發射后,到達預定的時間進行分離,聲學分機入水后發聲工作,對魚雷進行干擾和誘騙,其飛行彈道如圖1所示。分析助飛器材發射過程,聲學分機入水點的精度主要受以下因素影響。
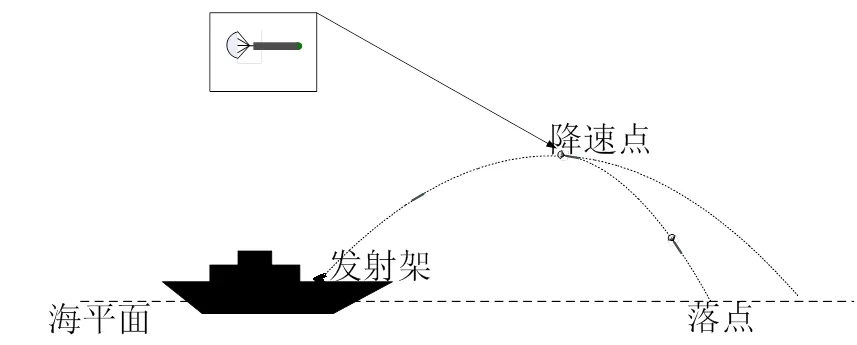
圖1 助飛器材飛行彈道示意圖
1)發射參數計算影響。發射裝置收到發射命令后計算并裝訂發射參數,發射參數計算是否正確、發射裝置機械精度直接決定了助飛器材落點精度。
2)助飛器材自身的落點精度影響。助飛器材分離時間、降落傘大小等自身因素引起的誤差也將帶入最終的落點精度。
3)發射艦的航速影響。發射艦航速越高,因慣性影響助飛器材發射后偏差越大。可以通過仿真計算對誤差進行估計,在發射裝置設計時可根據發射時航速通過發射參數自動調整修正該誤差。
4)發射艦的縱橫搖的影響。受海況影響,發射時發射艦的縱橫搖將直接影響助飛器材是否按照預定的方向出管飛行,該因素影響可以通過發射裝置自適應系統進行修正。
5)海區風速、流速等環境影響。助飛器材在下降過程中受風速的影響會產生偏移,助飛器材入水后也會隨著海流產生漂移。
6)測量設備測量誤差影響。使用光測、遙測水聲測量等手段可對助飛器材入水點進行定位,但視測量手段的不同測量結果也會帶來相應的誤差。
以上助飛器材落點精度的影響因素中,除e和f是由于測量過程中測量設備或人為因素帶來的影響,需要對試驗結果進行修正外,其他因素均為被試品自身性能或其適應復雜環境條件帶來的誤差,不需要進行修正。
2 助飛器材落點測量方法
助飛器材落點精度試驗,是為了考核助飛器材發射后實際入水點相對于理論入水點的散布是否滿足指標要求,理論入水點通過發射位置進行計算,而實際入水點定位是本項試驗的關鍵。下面分析幾種常見的助飛器材入水點定位方法。
2.1 光學定位法
光學定位法是利用光學原理對助飛器材進行飛行彈道參數測量、落點圖像記錄等,最后通過對拍攝的圖像進行對比判讀進行入水點定位,一般采用直升機、無人機或輔助船上一個或多個攝像機對助飛器材入水點進行拍攝測量。試驗后根據圖像中海面參考點的位置相對于助飛器材位置計算助飛器材入水點,或采用多臺攝像機拍攝交匯計算助飛器材的飛行彈道,進而得到助飛器材的入水點位置。

圖2 光學定位法示意圖
光學定位法的優點是測量范圍廣、精度高,測量結果可視化程度高,便于事后分析判讀;缺點是由于助飛器材目標體積較小,當海況較差、海上浪花較多時容易造成目標判讀困難或判讀錯誤,導致測量的數據無效。
2.2 水聲定位法
水聲定位法是利用多個水聽器同時監聽器材發射的噪聲而進行定位。海上試驗前在助飛器材理論入水點區域水下布放多個水聽器陣,利用助飛器材入水后發聲工作的特點進行測量,當三個水聽器陣同時監聽到助飛器材發聲后,可交匯計算助飛器材入水點位置。
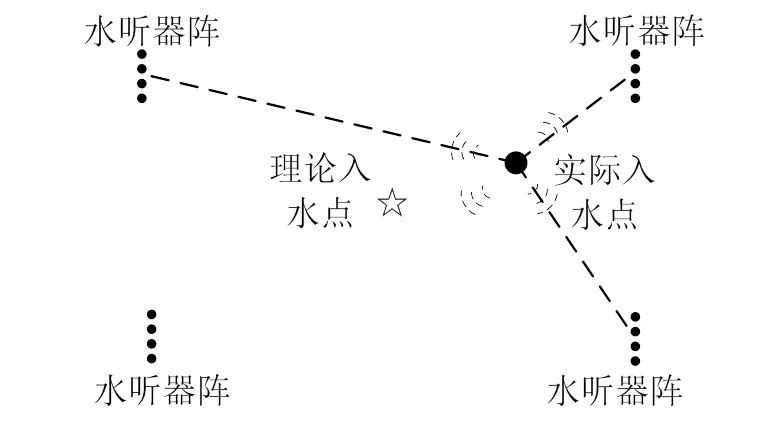
圖3 水聲定位法示意圖
水聲定位法的優點是利用助飛器材連續發聲來判斷目標位置,測量的目標準確度高,缺點是測量系統組成復雜,測量陣布放入水后位置無法調整,對于無法預估落點位置的情況無法進行測量,同時受水文條件影響大,測量區域小,測量精度較差。
2.3 人工定位法
人工定位法是待助飛器材入水后,高速快艇從安全區域迅速航行至助飛器材入水點,GPS對助飛器材入水點進行定位。

圖4 人工定位法示意圖
人工定位法由于是人為確定目標位置,因此測量的目標真實;但由于試驗安全考慮,在助飛器材入水后高速快艇才從安全區域航行至入水點,存在找不到助飛器材,測不到數據的風險,且由于洋流的影響,測量的誤差也較大,海況較差時還存在高速快艇航行安全的風險。
2.4 遙測定位法
遙測定位法是在助飛器材的彈體上加裝合作信標,助飛器材發射后實時向試驗母船上接收設備發送自身的位置信息,該方法可以計算出助飛器材的全彈道,其中最后一幀位置信息可作為助飛器材入水點位置。

圖5 遙測定位法示意圖
遙測定位法的優點是測量方法方便快捷、精度高,能測量助飛器材的全彈道,便于分析助飛器材是否飛行正常;缺點是需在助飛器材上加裝合作信標,可能對助飛器材飛行性能有一定影響,同時助飛器材飛行速度快,且空中有分離動作,可能導致合作信標工作不可靠,無法測量有效數據。
3 數據處理方法及誤差分析
助飛器材落點精度試驗的目的是測量每一枚助飛器材實際落點位置與理論落點位置的偏差,與指標值進行比對,分析其是否達到要求。測量到器材入水點位置后可按以下方法進行數據處理。
3.1 數據處理方法
作為應用廣泛的數學軟件,具有強大的數值運算、圖形顯示和符號運算功能,在數字信號處理方面也開發了相應的工具箱,并應用在水聲信號處理中。
本艦運動要素、本艦發射位置、器材入水位置為輸入數據,軟件中通過極坐標畫圖函數生成方位落點圖,如圖6中所示。程序部分關鍵語句如下:
3.2 誤差分析
誤差分析的目的就是評定試驗數據的精確性,通過誤差分析,認清誤差的來源及其影響,并設法消除或減小誤差,提高試驗結果的精確性。下面對四種測量方法的誤差進行對比分析。
1)光學定位法
光學定位法測量誤差主要是由圖像判讀誤差和大地坐標定位誤差引起。其中圖像判讀誤差是主要誤差源,受圖像分辨率影響誤差一般可達到10米以內。
2)水聲定位法
水聲定位法測量誤差主要是由水聽器陣大地坐標定位誤差、水聽器陣接收靈敏度、海洋環境的干擾噪聲等因素引起,綜合測量誤差一般可達到100米以內。
3)人工定位法
人工定位法的誤差主要由快艇大地坐標定位誤差、從器材入水至人工定位期間助飛器材飄移產生的誤差引起。其中飄移的誤差隨人工搜索定位的時間增大而加大,該誤差可根據試驗海區的流速流向進行適當修正,綜合測量誤差一般可達到50米以內。
4)遙測定位法
遙測定位法的誤差主要受遙測設備大地坐標定位誤差、接收靈敏度等因素影響,綜合測量誤差一般可達到10米以內。
通過以上誤差對比分析可以看出,在測得入水點位置數據為真目標的前提下,光測和遙測定位數據相比水聲定位和人工定位數據誤差小,但是光測和遙測數據也存在判讀的目標為假目標,或在試驗中未采集到試驗數據的可能。
由于助飛器材是在入水后通過發射強噪聲和回波對魚雷進行干擾和誘騙,其作用距離遠,在作戰使用時只要將助飛器材布放在魚雷搜索扇面以內即可,因此對助飛器材的落點精度要求不高。以上四種方法均可以滿足試驗要求,但又各有局限性。試驗時應根據試驗保障條件、試驗海區氣象等因素綜合衡量選擇一種方法進行測量,有條件時可同時選擇兩種以上方法同時進行測量,當兩種以上方法同時測量到助飛器材入水點有效數據時,則選擇精度高的一種作為最終試驗結果進行處理。
4 結束語
助飛器材落點精度是大型水面艦水下防御的重要考核指標,其試驗方法受試驗保障條件制約較大,特別是當試驗時海況高、能見度較差時,用常規方法測量其落點位置更為困難,因此在后續新型助飛器材設計時應考慮到測量需求,將遙測合作目標集成在助飛器材中或研制飛行彈道、物理特性與實際助飛器材一致的試驗用彈,具備自身定位功能,在試驗時實時將自身位置發送至接收設備,從根本上解決助飛器材落點測量的難題。
[1] 李君橋, 岳劍平, 冼觀福, 印勇. 基于多普勒頻移的水下運動目標測距技術[J]. 聲學技術, 2008, 27(5): 758-760.
[2] 韓建輝, 楊日杰, 高學強, 王偉. 空中聲源的水下聲預警研究[J]. 聲學技術, 2008, 27(5): 671-673.
[3] 劉秀麗, 馮海泓, 黃敏燕, 等. 基于單基元幾何交匯法的被動目標測距測速研究[J]. 聲學技術, 2007, 26(2): 173-178.
[4] 吳國清, 馬力. 利用輻射聲多線譜的多普勒進行距離估計[J]. 聲學技術, 2006, 27(2): 140-145.
[5] 曲寶忠, 賈旭山. 武器裝備試驗鑒定中的誤差分析[J].中國海上靶場, 2015, (08): 4-6.
[6] 周偉江, 李楠. 海上動態RCS測量主要誤差因素分析[J]. 海上靶場學術, 2013, (7): 32-35.
[7] 董陽澤, 許肖梅, 劉平香.水聲對抗中的水聲網絡及其對抗[J]. 火力與指揮控制, 2011, 36(7): 1-6.
[8] 董陽澤, 許肖梅, 劉平香. 線導魚雷及其對抗仿真研究[J]. 廈門大學學報(自然科學版), 2009, 48(2): 220-227.
[9] 丁翠環, 杜召平, 韓碩. 長基線水聲跟蹤定位系統精度分析[J]. 聲學技術, 2014, 33(5): 182-185.
[10] 于平, 丁翠環, 于莉. 水聲定位精度的評估標校方[J]. 艦船電子工程, 2010, 191(5): 194-196.
Placement Measuring Method and Error Analysis of Assisted Flight Underwater Acoustic Confrontation Equipment
Li Yang, Fei Zhigang, Chen Baozhu
(Army Unit 91388, Zhanjiang 524022, Guangdong, China)
TM666.7
A
1003-4862(2019)09-0032-04
2018-08-20
黎陽(1977-),男,工程師。研究方向:水聲對抗裝備試驗鑒定。E-mail: baoliang747@126.com
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
