電動公交客車增程器開關控制策略和等效能耗最小化策略優化*
2019-01-29 06:46:20樓狄明譚丕強胡志遠
汽車工程 2018年12期
徐 寧,樓狄明,譚丕強,胡志遠
(同濟大學汽車學院,上海 201804)
前言
現階段,純電動客車存在成本高、電池壽命衰減快、續駛里程短等劣勢,難以在公交領域大范圍推廣。而配備高效柴油機發電機組的增程式電動公交客車,成本較低,相對并聯和混聯式結構其控制簡單,且具有較高的節油潛力,是一種現階段較為理想的傳統客車替代方案[1-4]。
增程式電動汽車首先在純電動模式行駛,當動力電池組荷電狀態(SOC)低于一定值時,進入增程模式。增程式電動公交客車每天在200~300km的運行里程中,都存在較大比例的增程模式,即電量維持階段。
在電量維持階段增程式電動汽車多采用單點恒溫器開關式能量管理策略[4-7],增程器開關狀態只與動力電池組SOC相關,當SOC低于設定最小值SOCmin時開啟,在高于設定最大值SOCmax時則關閉,增程器工作在效率較高的單個點上,由于驅動電機需求電功率的波動,存在能量從發動機到發電機到儲能系統再到驅動電機的多級傳遞過程,能量損失增加,能量利用率下降,同時其電池組充放電也增加,最終導致其節油率降低和電池組循環壽命衰減加快。能量管理策略方面,盡管在單點式能量管理策略下,發動機工作在最優效率點,但無法取得發動機效率和儲能系統充放電效率的最優,為此可采用實時ECMS策略進行實時最優尋解,但對于增程式電動系統,其儲能系統相對非插電混合動力系統容量較大,其ECMS策略也需要進行適當的優化。
本文中在原增程器開關控制策略的基礎上增加中重制動工況關閉等觸發,并針對增程式電動公交客車改進了ECMS策略,從而從增程器開關控制策略和能量管理策略兩個方面來優化增程式電動公交車電量維持階段性能。
1 研究對象
研究對象為一款長12m的城市客車,其整車參數如表1所示。驅動電機采用某永磁同步電機,其特性參數如表2所示。動力電池組采用磷酸鐵鋰電池組,其參數如表3所示。
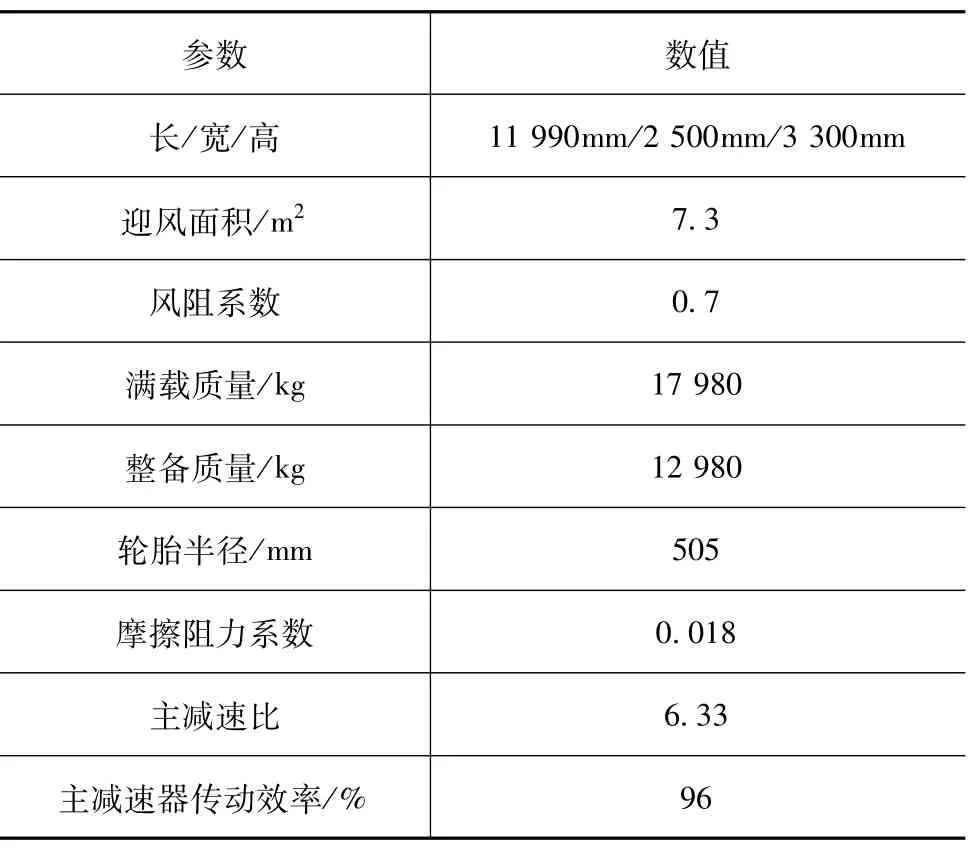
表1 增程式電動公交車整車參數
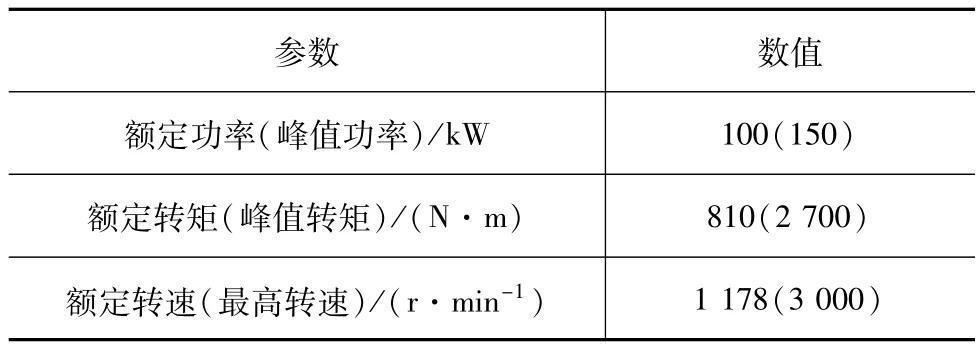
表2 驅動電機參數
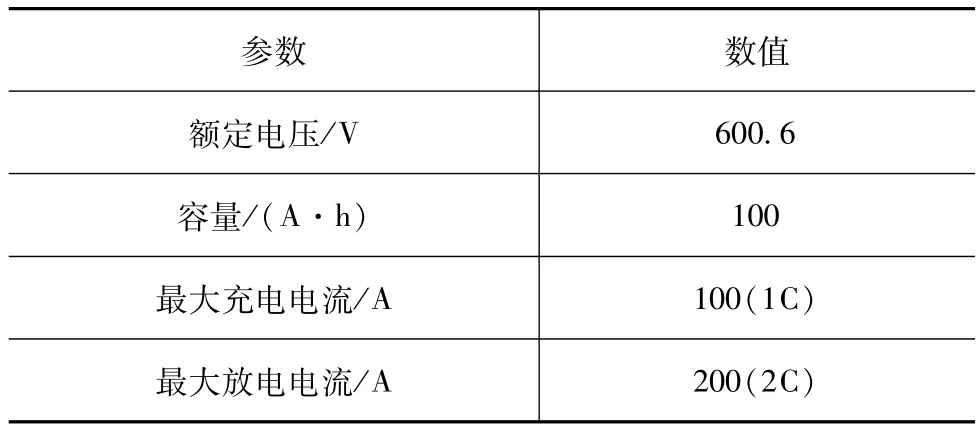
表3 動力電池組參數
增程器采用的是某2.0L四缸柴油機,最大功率為71kW,對應轉速為3 000r/min。增程器系統最終燃油消耗率如圖1所示,其中增程器系統燃油消耗率最小值為 224g/(kW·h),對應轉速為 2 000r/min,轉矩為246.5N·m,輸出電功率為48.6kW。
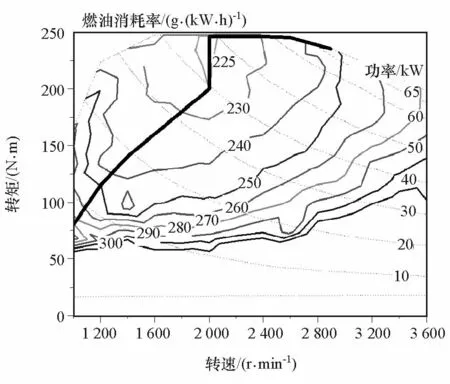
圖1 增程器系統油耗圖
2 模型搭建與能量管理策略仿真優化
仿真模型如圖2所示。采用AVLCruise與Simulink聯合前向建模,其中駕駛員模型、循環工況模型和整車動力學模型等在AVL Cruise中搭建,而基于功率流的整車控制策略模型在Simulink中搭建,通過 CRUISE Interface進行信號交互,實現聯合仿真。
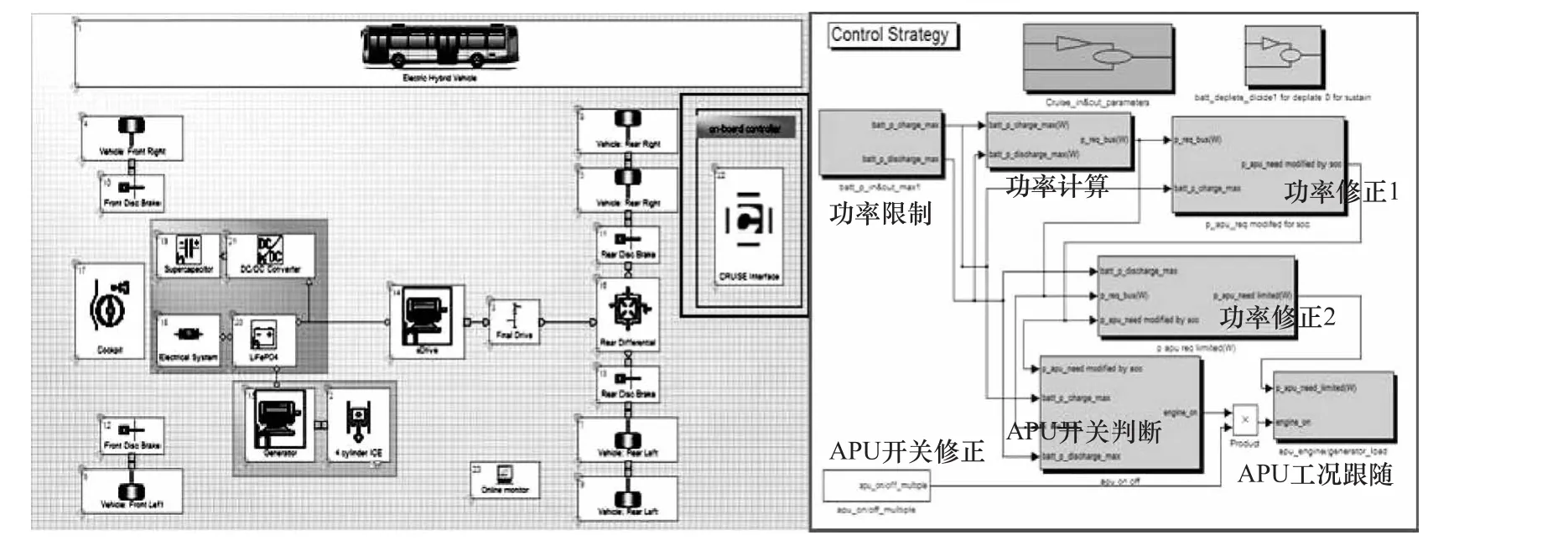
圖2 AVL CRUISE與Simulink聯合仿真模型
仿真過程采用《重型混合動力電動汽車能量消耗量試驗方法》[9]推薦中國典型城市公交工況循環(CCBC)。仿真過程采用6個CCBC循環組成的仿真循環,并選取儲能系統電量波動最小的一個循環作為電量平衡運行階段,重點分析其油耗和鋰電池組循環充放電特性。
參考《重型混合動力電動汽車能量消耗量試驗方法》[10]中推薦的電量油耗折合公式進行折算到燃油消耗體積Vfuel,單位為L,如式(1)所示。

式中:Ek為儲能系統電量變化量,kW·h;Dfuel為燃料密度,g/cm3;Qfuel-low為燃料低熱值,J/g;ηeng和 ηgen分別為發動機和發電機效率。
由于鋰電池組充放電倍率較小,用其循環累計充電量的大小來近似衡量電池循環壽命[11]。定義鋰電池組循環充電系數cbatt_charge為

式中:Qbatt_charge_total為對應時間內累計充電量,kW·h;Qbatt_charge為鋰電池額定容量,kW·h;S為行駛里程,km。
2.1 電量維持階段增程器開關控制策略優化
增程器開關控制策略中首先增加了大驅動功率需求時開啟增程器的策略來補償高速及加速過程驅動電機電功率需求。為避免制動能回收潛力被占用,在中重制動過程,當儲能系統最大充電功率絕對值小于增程器輸出功率和驅動電機最大制動回收功率之和時,將關閉增程器。但增程器將較頻繁地停機,并會導致鋰電池組SOC長期處于較低狀態,在某些工況可能出現過放電的可能。為保證電量維持階段鋰電池組SOC波動范圍不頻繁低于SOCmin,在電量維持階段增加了較大驅動功率需求時預測開啟增程器策略。最終增程器開關控制策略由4部分組成:基于SOC上下限的基本開關策略、大驅動功率需求時開啟觸發、較大驅動功率需求時預測開啟觸發和中重制動關閉觸發,如圖3所示。同時,為防止增程器起停太過頻繁,也將基于SOC上下限的基本開關控制策略中的輸入量上次開關狀態定義為優化后的增程器開關控制策略上次開關狀態輸出。
優化增程器開關控制策略前后增程式電動公交客車各方面性能對比如圖4和圖5所示。從圖4和圖5中可以看出,優化增程器開關控制策略后,增程器起停次數增加,且在較大驅動工況會開啟,在中重制動工況會關閉,這一方面使鋰電池組SOC波動減少到約1.7%,因此動力電池組循環充放電減少,另一方面制動過程鋰電池組的充電功率不再被增程器發電功率占用,而更多地用于公交客車制動能量的回收,如圖6所示。
圖7和圖8分別為優化增程器開關控制策略前后驅動電機制動功率分布和鋰電池組充放電功率分布情況。從圖7和圖8中可以看出,優化增程器開關控制策略后增程式電動公交客車制動能量回收潛力顯著提升,每次制動過程驅動電機電功率都能達到儲能系統最大充電功率和當前驅動電機最大制動回收電功率的最大值。
仿真結果表明,優化增程器開關控制策略后,折合百公里油耗從 38.49降低到 34.59L,降低了10.1%,鋰電池組循環百公里充電系數也從1.79降低到1.13,降低了36.7%。對應的能量流動對比分析結果如圖9所示。
從圖9中可以看出,優化增程器開關控制策略之后,鋰電池組充放電消耗減少,仿真循環下儲能系統消耗降低了45%,但占比仍然較高,達3.2%。同時制動消耗也因制動能量回收的增加而顯著減少。

圖3 優化后增程器開關控制策略示意圖
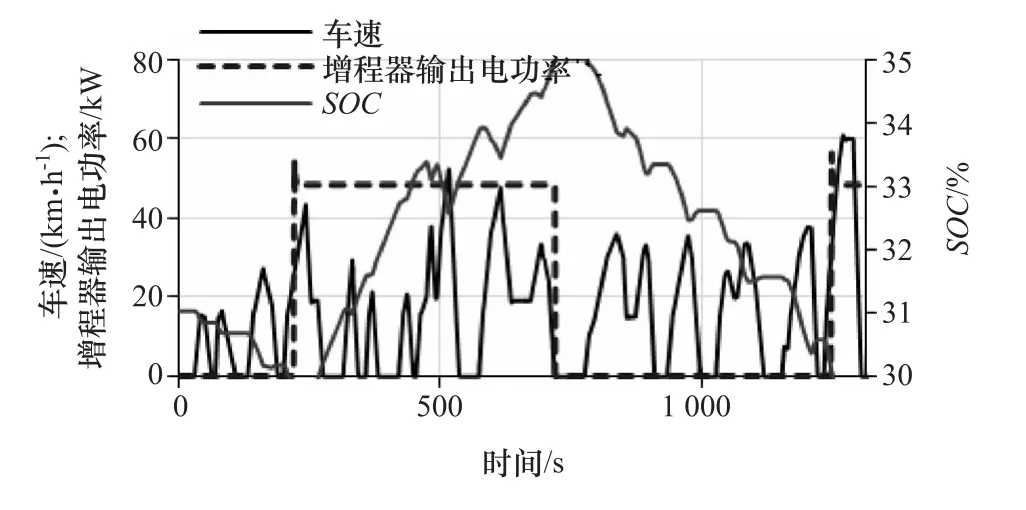
圖4 原增程器開關控制策略下增程器開關狀態和SOC變化趨勢仿真結果
圖5 優化增程器開關控制策略后增程器開關狀態和SOC變化趨勢仿真結果
2.2 實時優化的等效燃油消耗最小策略與改進
等效燃油消耗最小策略需要建立當前時刻儲能系統消耗的電能與增程器未來時刻補償這些能量而消耗的燃油之間的等效關系,對每一時刻增程器實際油耗與儲能系統等效油耗的總和進行優化,使其最小,并保證儲能系統SOC維持在目標值附近。
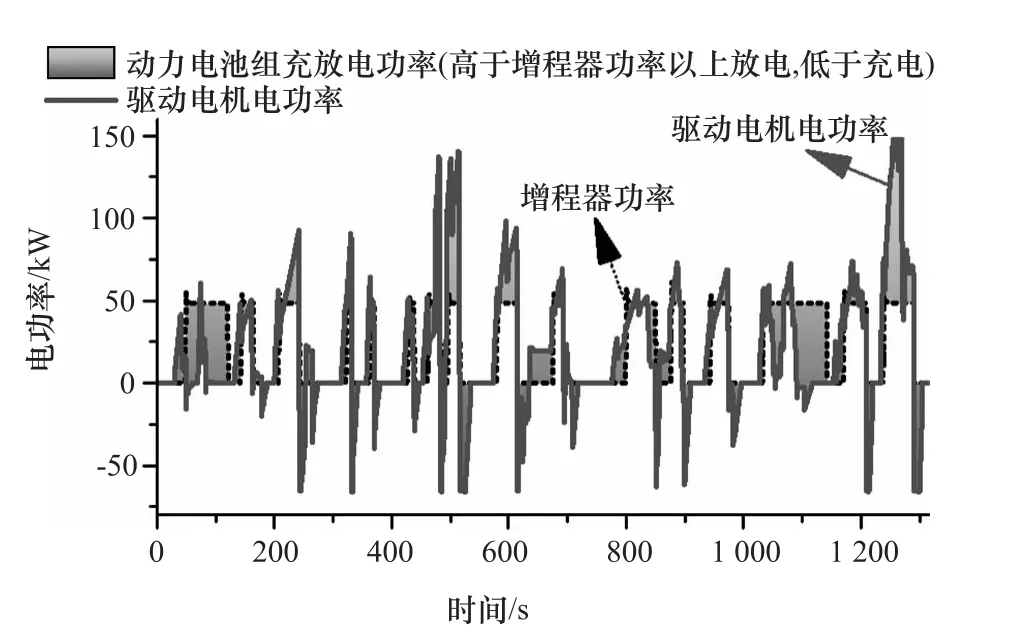
圖6 優化增程器開關控制策略后驅動電機電功率分配特性
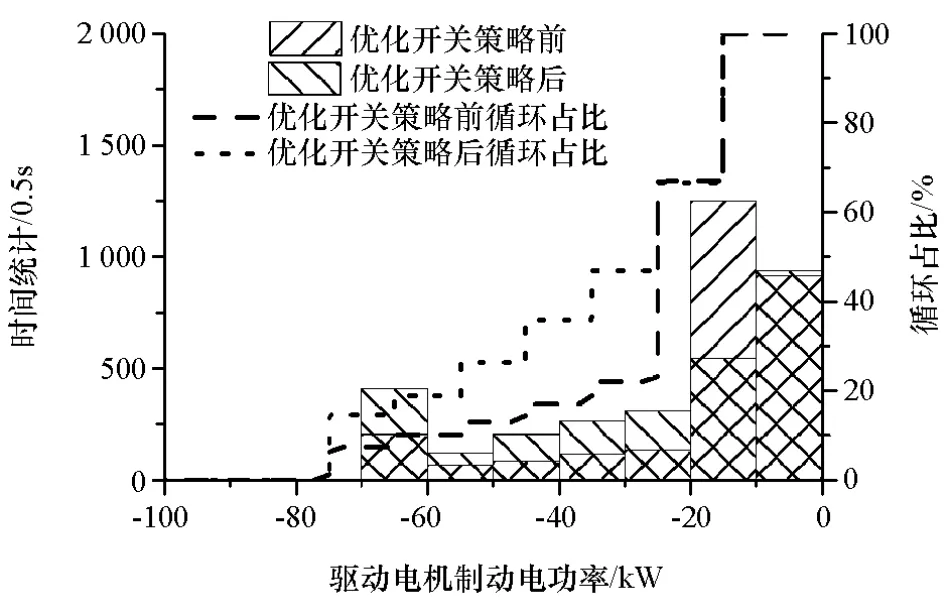
圖7 優化增程器開關控制策略前后驅動電機制動功率分布
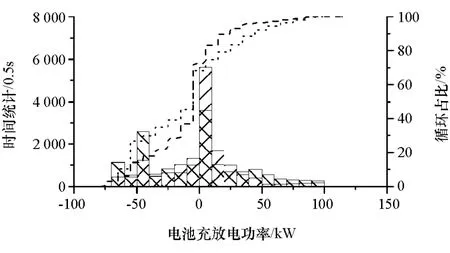
圖8 優化增程器開關控制策略前后鋰電池組充放電功率分布
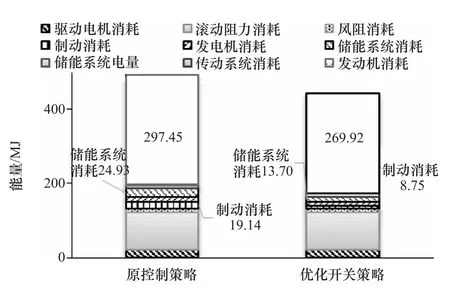
圖9 優化增程器開關控制策略前后能量流動對比
等效燃油消耗最小策略的目標函數為

從儲能系統角度出發,工況可分為儲能系統未來補償工況和未來消耗工況。儲能系統未來補償工況的儲能系統瞬時等效燃油消耗為

式中:Pess_dis和ηdis分別為該時刻儲能系統瞬時放電功率和放電效率g分別為未來補償過程增程器平均燃油消耗率和儲能系統平均充電效率。
儲能系統未來消耗工況的儲能系統瞬時等效燃油消耗為

式中:Pess_chg和ηchg分別為該時刻儲能系統瞬時充電功率和充電效率s分別為未來消耗過程增程器平均燃油消耗率和儲能系統平均放電效率。
同時,單純依靠改進ECMS無法實現SOC穩定,因此需要增加平衡補償函數f(SOC):
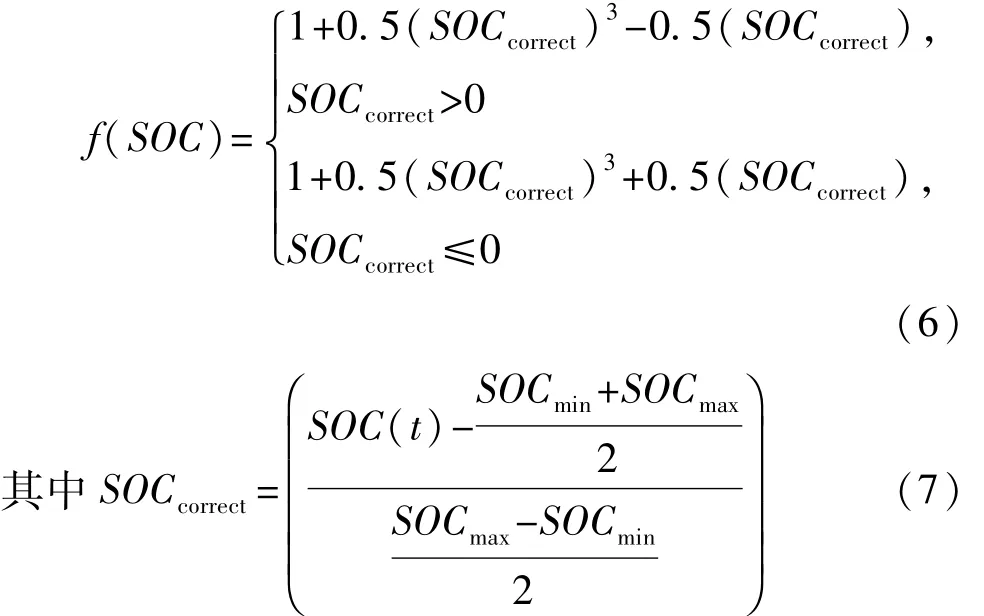
式中:SOC(t)為當前時刻的 SOC;SOCmax和 SOCmin分別為電量維持階段的上下限值,電量維持階段需要保證。
對于混合動力汽車,儲能系統容量較小,常進行制動過程的能量回收修正,其將部分代替未來鋰電池組電能補償時燃油消耗[12-13],能起到在驅動工況向儲能系統未來補償策略傾斜的作用,其目的是為后續制動過程提供足夠的儲能系統容量。
但對于插電增程式電動汽車,無論在儲能系統未來補償和未來消耗模式,儲能系統可用容量都較高,不影響制動能量回收,且在優化增程器開關控制策略后更明顯,所以將不考慮制動能量回收修正。此外,對于增程式電動公交客車,增程器輸出功率較低,在較大驅動工況無法滿足驅動電機功率需求,因此其儲能系統未來消耗模式所占的時間比例會較低,而未來補償模式所占的時間比例會較高。
最終等效燃油消耗最佳目標函數為
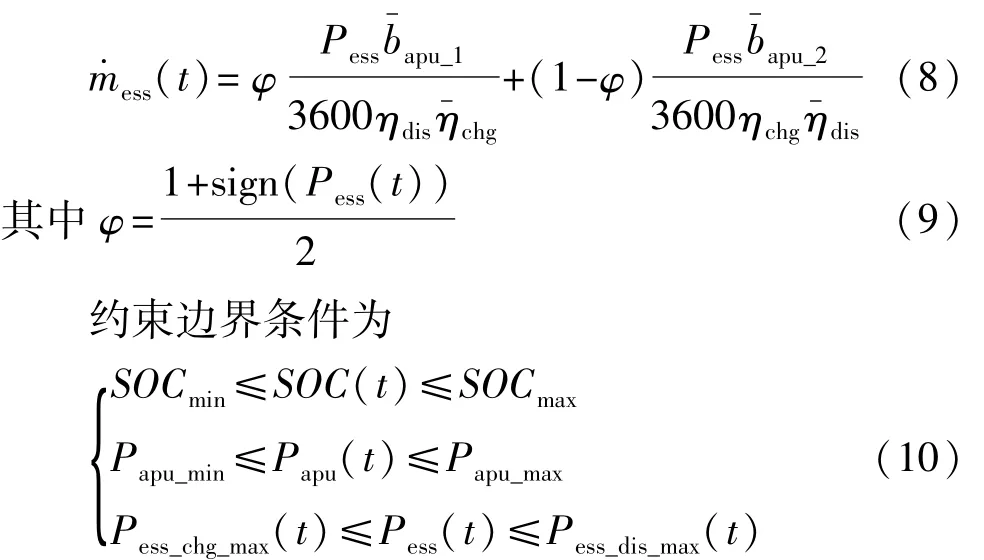
式中:Papu_max和Papu_min分別為增程器輸出功率上下限值;Pess_chg_max和Pess_dis_max分別為儲能系統最大充放電功率。
最終改進后ECMS的控制框架如圖10所示。
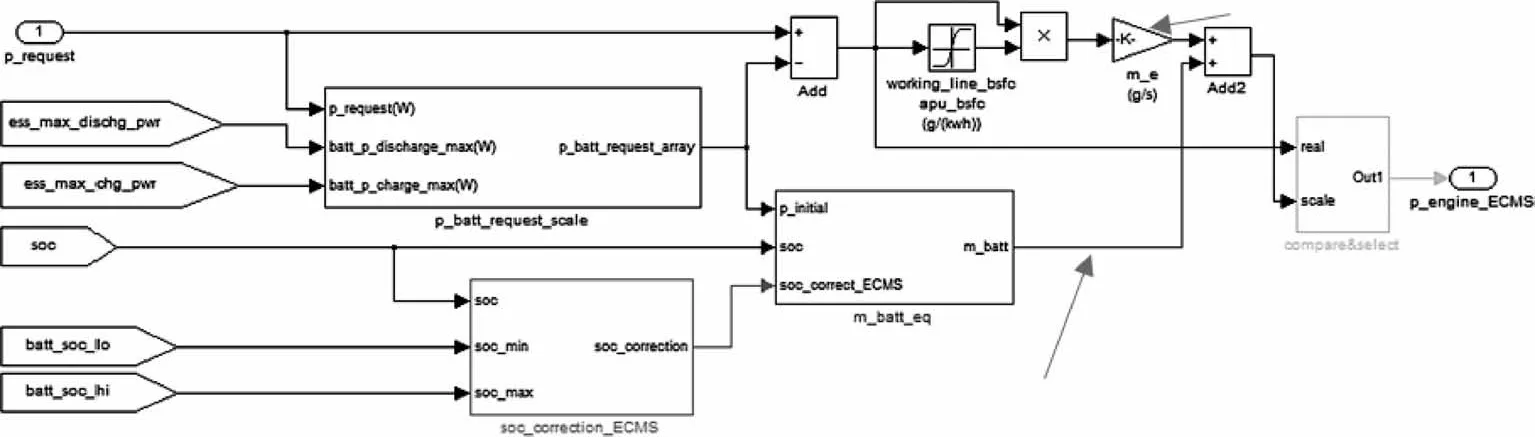
圖10 改進ECMS系統框圖
等效燃油消耗最小策略下,增程器開關狀態和SOC變化趨勢仿真結果如圖11所示。從圖11中可以看出,改進ECMS下增程器輸出功率波動較大,多數工況能跟隨驅動電機功率需求,但儲能系統SOC波動情況顯著減小。
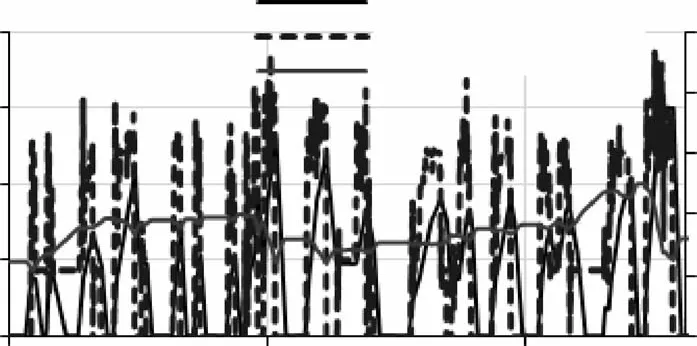
圖11 改進ECMS下增程器開關狀態和SOC變化趨勢仿真結果
圖12 所示為改進ECMS下驅動電機電功率分配特性。從圖12中可以看出,改進ECMS下,增程器輸出功率基本能跟蹤驅動電機電功率需求,在功率需求較大時,增程器輸出功率為最大輸出功率65kW。
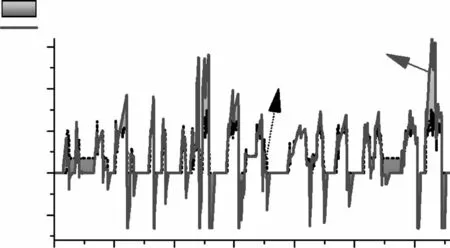
圖12 改進ECMS下驅動電機電功率分配特性
最終,進一步采用改進ECMS后增程式電動公交客車百公里油耗進一步降低,達到34.20L,相對優化增程器開關控制策略后單點能量管理策略降低了1.1%,鋰電池組循環充電系數降低更明顯,降低了多達35.4%。
圖13所示為改進ECMS下能量流動分析圖。
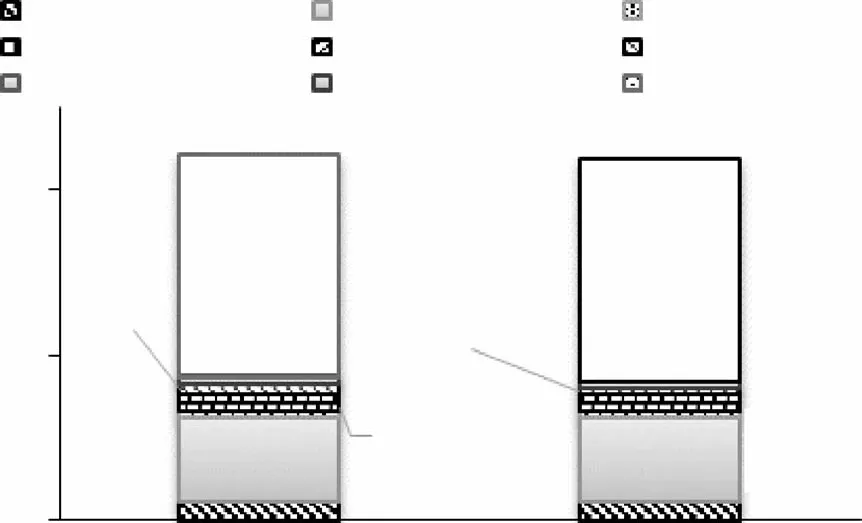
圖13 改進ECMS下能量消耗分配
從圖13中可以看出,采用改進ECMS后,盡管發動機消耗和發電機消耗都有所增加,但減少了動力鋰電池組大功率放電工況比例,并使動力鋰電池組充放電深度減少,儲能系統能量消耗也因此顯著減少,此外小制動工況增程器不關閉時改進ECMS下增程器輸出功率較小,可進一步增加制動能量回收,減少制動消耗。可見,改進ECMS下可以顯著減少動力鋰電池組大功率充電比例,從而減少動力鋰電池組低效率充放電工況,如圖14所示。
3 半實物仿真平臺搭建與試驗驗證
3.1 半實物仿真平臺搭建
用于驗證增程式電動客車整車控制策略的半實物仿真平臺如圖15所示。從圖15中可以看出,增程器為實物,驅動電機、傳動系統、整車、駕駛員和道路工況等都為虛擬模型。最終將虛擬模型和整車控制策略集成在Motohawk開發板中,如圖16所示。

圖14 儲能系統充放電功率分布圖(+是放電,-是充電)
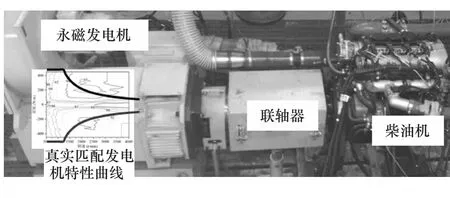
圖17 增程器示意圖
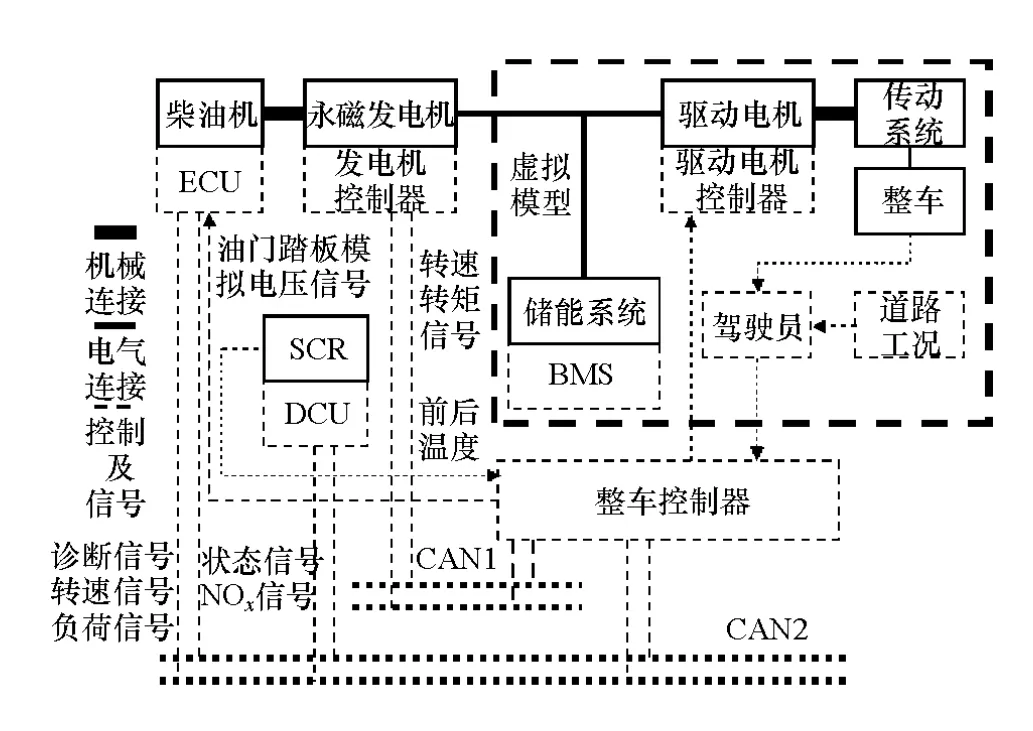
圖15 半實物仿真平臺示意圖

圖16 Motohawk ECM-0565-128開發板
此外增程器所匹配的永磁同步電機采用某電力測功機電機替代,如圖17所示,但用匹配的永磁同步電機的最大轉矩和效率MAP等進行修正,從而通過在控制模型中對電機性能的限制實現了對永磁發電機的實物模擬。
3.2 優化策略試驗驗證
最終增程器開關控制策略優化前后以及改進ECMS下SOC和增程器輸出功率仿真與試驗對比如圖18~圖20所示。
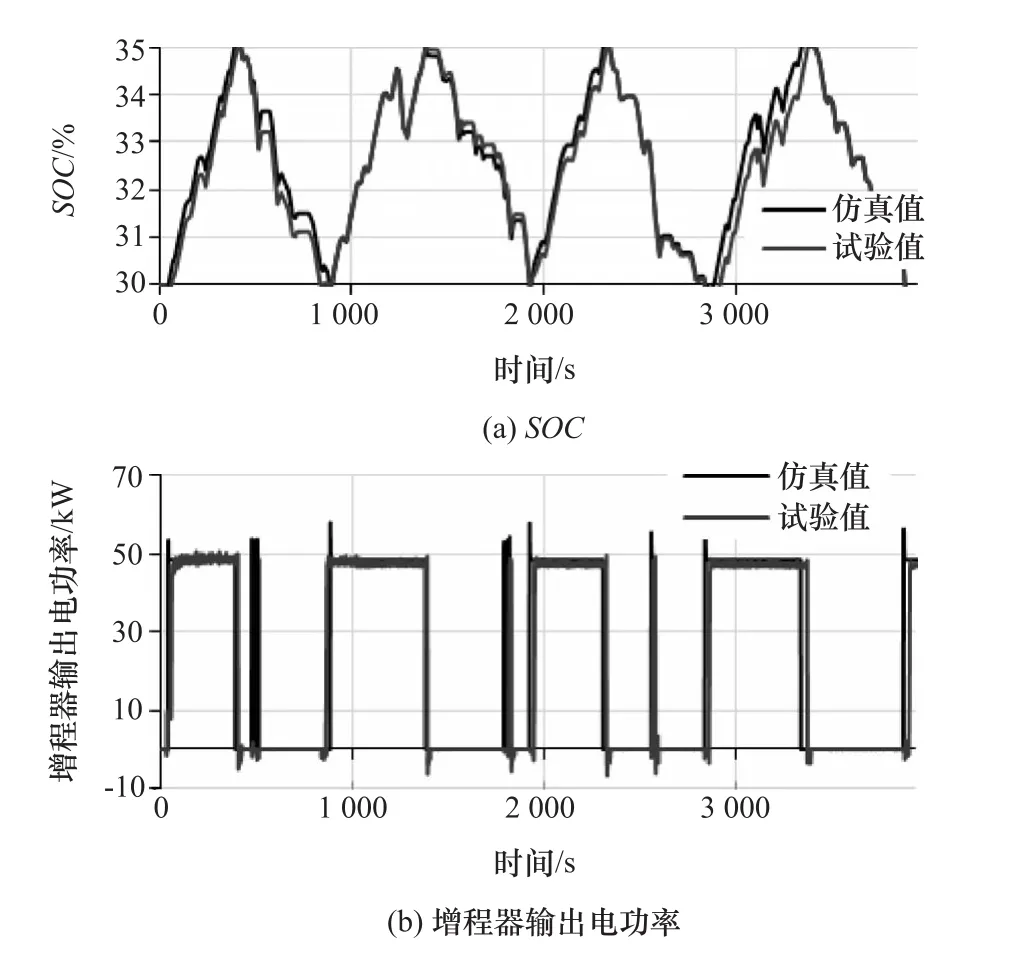
圖18 增程器開關控制策略優化前SOC和增程器輸出電功率變化趨勢
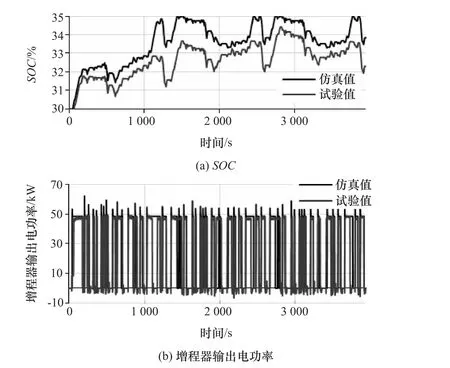
圖19 增程器開關控制策略優化后SOC和增程器輸出電功率變化趨勢

圖20 改進ECMS下SOC和增程器輸出電功率變化趨勢
由圖可見:增程器開關控制策略優化前,SOC和增程器輸出功率跟蹤都較好;但增程器開關控制策略優化后以及采用改進ECMS后,SOC跟蹤略有差異。這主要是因為頻繁起停過程,實際過程起停及瞬態切換相對仿真有所滯后引起的,但變化趨勢都符合相關增程器開關控制策略和能量管理策略下的規律。
最終百公里油耗和鋰電池組循環充電系數試驗結果如圖21所示。
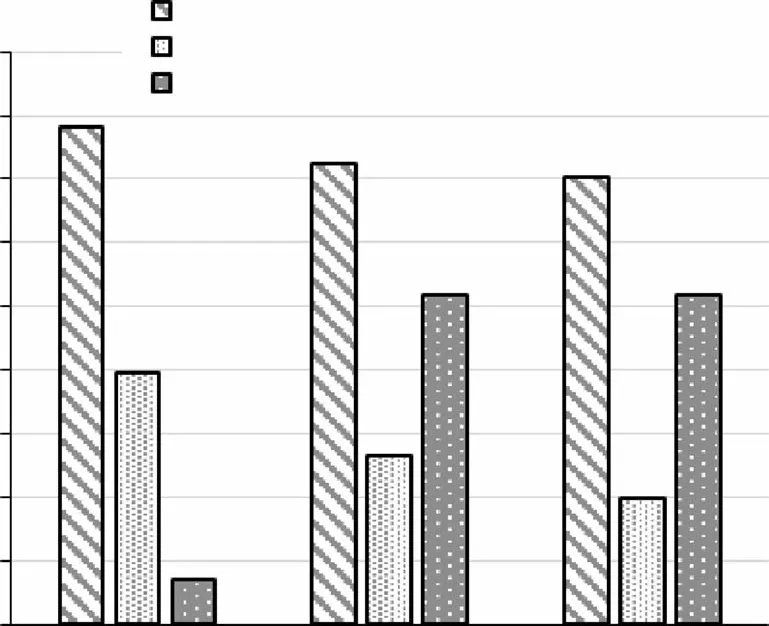
圖21 增程器開關控制策略和改進ECMS下性能試驗結果對比
從圖21中可以看出,試驗結果與仿真結果變化趨勢相同。優化增程器開關控制策略后,增程式電動公交客車電量維持階段百公里油耗和鋰電池組循環充電系數分別降低了7.3%和33.0%,但增程器起停次數會有所增加。進一步采用ECMS后,百公里油耗低至35.22L,鋰電池組100km循環充電系數降至0.99,相對能量管理策略優化前分別降低了2.8%和25.0%,其中油耗結果略有改善,但鋰電池組循環充電系數明顯減少。
4 結論
(1)電量維持階段,優化增程器開關控制策略后,增程式電動公交客車百公里油耗和鋰電池組循環充電系數分別降低了7.3%和33.0%,改善明顯,但增程器起停次數會有所增加。
(2)進一步采用改進ECMS能量管理策略后,百公里油耗略有降低,循環充電系數則進一步明顯減少,增程式電動公交客車百公里油耗降至35.22L,鋰電池組100km循環充電系數降至0.99,相對原增程器開關控制策略和能量管理策略下,分別降低了多達9.9%和49.7%。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
