基于SSVEP的腦控飛行器研究與實現
2019-01-29 02:45:40徐賢吳正平查彬
電子測試 2018年24期
徐賢,吳正平,查彬
(三江學院,江蘇南京,210012)
0 引言
近年來,在腦機接口(Brain Computer Interface)技術逐漸在醫學工程、休閑娛樂等領域體現出較高的學術價值、科學意義和應用前景。如今用大腦控制設備的技術不再是幻想,用“意念”控制身邊的設備已成為可能,本文正基于腦機接口技術,通過SSVEP(Steady-State Visual Evoked Potentials)技術實現腦電信號控飛行器的目的,本技術的實現,對助殘康復等醫療服務機器人設計有較高的參考應用價值。
1 系統整體方案設計
人體腦電信號在視頻受到視覺刺激時會含有與視覺刺激相關的頻率成份,從而我們可以通過采集SSVEP信號,提取特征頻率,轉換成控制指令從而控制飛行器飛行狀態。系統通過8通道便攜式無線腦電信號采集裝置采集腦電信號,對特征頻率進行識別分類,建立刺激頻率與飛行方向之間的映射關系,最終達到控制目的。其總體框圖如圖1所示。
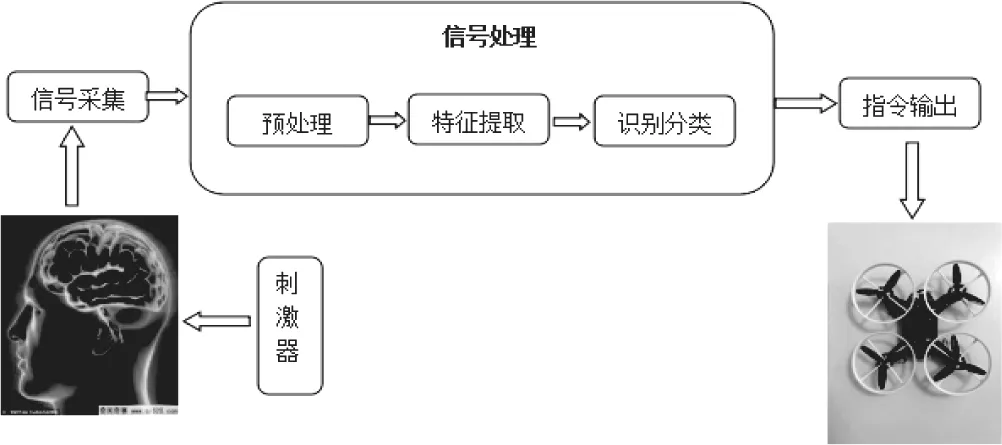
圖1 系統總體框圖
2 飛行器硬件設計及關鍵參數速寫
飛行器硬件設計采用STM32F103RCT6系列控制器作為主控芯片,使用MPU6050作為運動處理傳感器芯片,通過I2C通信協議對飛行器姿態進行檢測,再檢測返回的值計算并輸出控制4個電機。微控制器通過SPI協議與NRF24L01模塊進行數據交換;上位機通過串口轉UART與飛行器進行實時通信,其整體框架如圖2所示。

圖2 飛行器系統框圖
2.1 姿態傳感器模塊
設計中采用6軸運動處理組件MPU-6050,通過獲取陀螺儀和加速度的值并傳給微控制器,微控制器計算后輸出電機控制量給電機,從而控制飛行器。圖3為姿態傳感器模塊的電路圖。
2.2 四軸飛行器控制程序設計及PID參數整定
四軸飛行器控制程序的主要設計思路:首先上電之后初始化STM32串口,中斷,定時器,IO口等外設,獲取MPU6050的原始數據,通過I2C獲取加速度數據acc_z, acc_x,acc_y和陀螺儀數據gyro.x、 gyro.y 、gyro.z;其次對得到的6個數據進行處理,通過DMP固件得到傾仰角pitch,翻滾腳roll,偏航角yaw;最后將得到的角度作為串級PID的輸入量,計算得出電機控制PWM量輸入給電機。
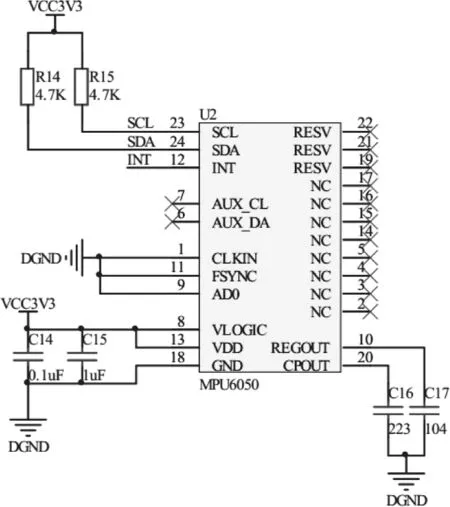
圖3 MPU6050電路圖
四軸飛行器控制系統屬于非線性二階系統,串級PID控制器可提高系統的控制穩定性和工作頻率,抗干擾能力強。本設計采用的串級控制器,將角度和角速度作為控制對象,其中角速度作為內環,角度作為外環。控制框圖如圖4所示。
串級PID控制器參數整定方法是內環采用湊試法,外環采用曲線法。內環參數整定時先確定一個X軸,把外環的參數P整定為0,此時角速度為0,然后依次整定P、I、D參數,具體的方法是先根據飛行器狀態確定P的極性,然后湊試P的值直至等幅震蕩。外環P參數整定時,先給定一個角度,通過NRF發送給上位機此時PWM的輸出量,記錄各個參數,如表1所示,通過對這些數據擬合曲線進行分析,最終選定的比例參數為1的時候,系統響應及時,最終趨于設定的角度如圖5所示。
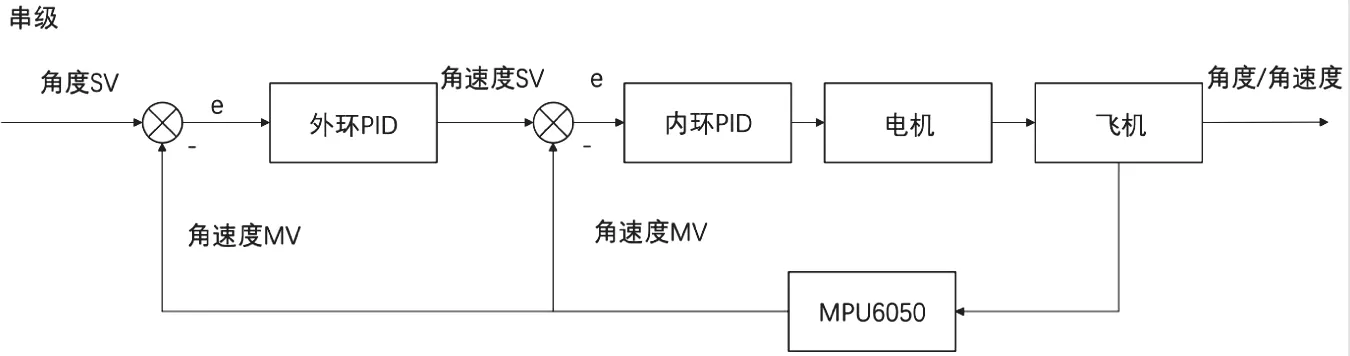
圖4 系統串級控制框圖
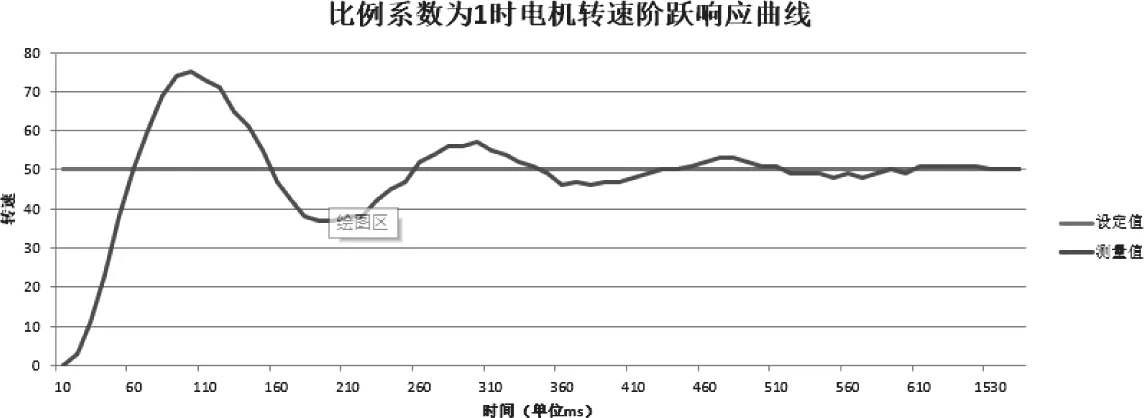
圖5 響應曲線

表1 數據表格
對于Y軸可以采用相同的方法。由于整個飛行器質量分布不均,會造成兩個軸的參數不一樣,但是還是很接近。
3 SSVEP系統設計
3.1 視覺刺激器的設計
如圖6所示,在人體眼睛注視有固定頻率刺激源目標時,視網膜感光細胞接收到刺激信息,通過神經傳輸通路傳到視覺皮層,在這里引起神經變化,產生相應的電位。產生電位的方式有瞬間視覺誘發電位和穩態視覺誘發電位,本設計研究的是穩態視覺觸發,它的電位具有信噪比高、頻譜穩定,而且刺激時間短,會發生電位重疊,此時電位會趨于穩定,且有周期性,通過頻譜分析,它的刺激源頻率和倍頻會出現明顯的峰值。
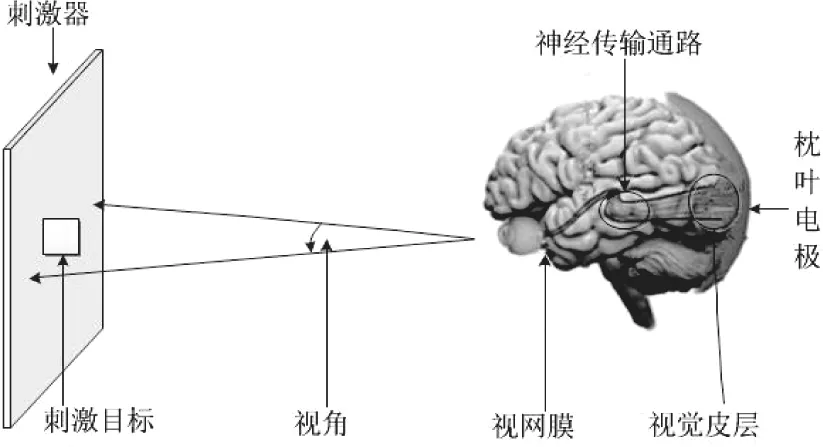
圖6 視覺誘發電位產生的過程
3.2 視覺刺激器的類型和參數
目前能有效誘發SSVEP信號刺激源類型有LED、LCD等。本設計借助電腦顯示屏LCD作為刺激源的產生,軟件上修改參數即可對刺激源進行頻率控制。
SSVEP中刺激頻率采用低頻段作為刺激源。為了減少LCD刺激時的干擾,故選擇LCD刷新頻率的正因子作為刺激頻率,設f0為LCD的刷新頻率,N為正整數,則可以選擇的頻率如下表2所示。

表2 可供選擇的最佳刺激頻率
由于刺激源的個數一般最多為5個,綜上所述,本次研究選擇其中4個作為刺激源的頻率,分別為6Hz,6.7Hz,7.5Hz,10Hz。
3.3 LCD刺激器的設計
LDC刺激器是在Labview環境下來設計的,其界面如圖7所示,它采用Labview中的while關鍵字實現刺激源不同頻率閃爍。界面中刺激源采用4個黑色白底的圓組成,如需要改變頻率只需要在下面的數字,然后運行即可。
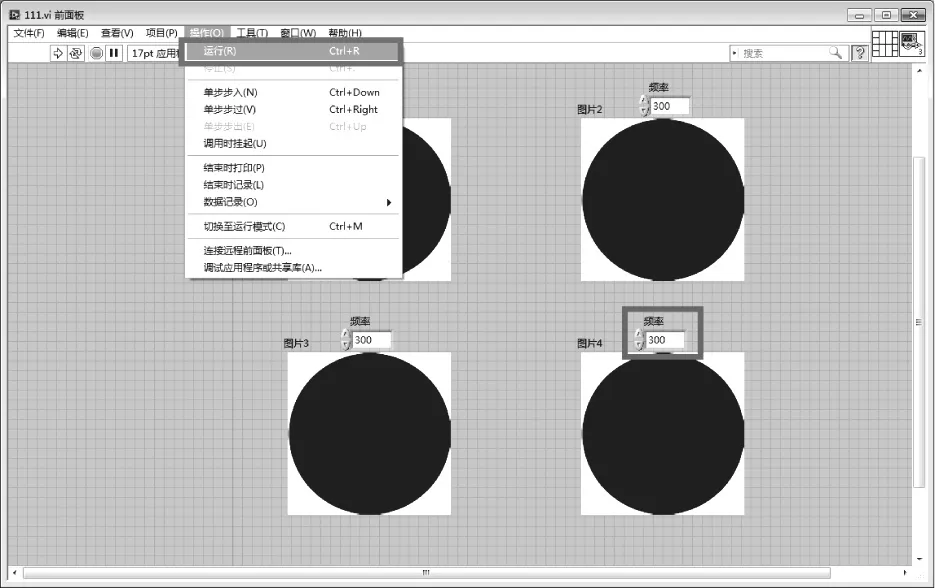
圖7 刺激源界面
3.4 腦電采集與處理
3.4.1 腦電采集
本次設計選擇了一款無線ERP腦電采集器。圖8所示為阻抗測試界面,腦電帽采用無膠便攜式電極帽,眼睛與LCD的距離大約為0.6m左右,為保證采集信號的完整性和準確性,先測試電極帽上的每個電極的阻抗值,一般要求阻抗不高于30kΩ。
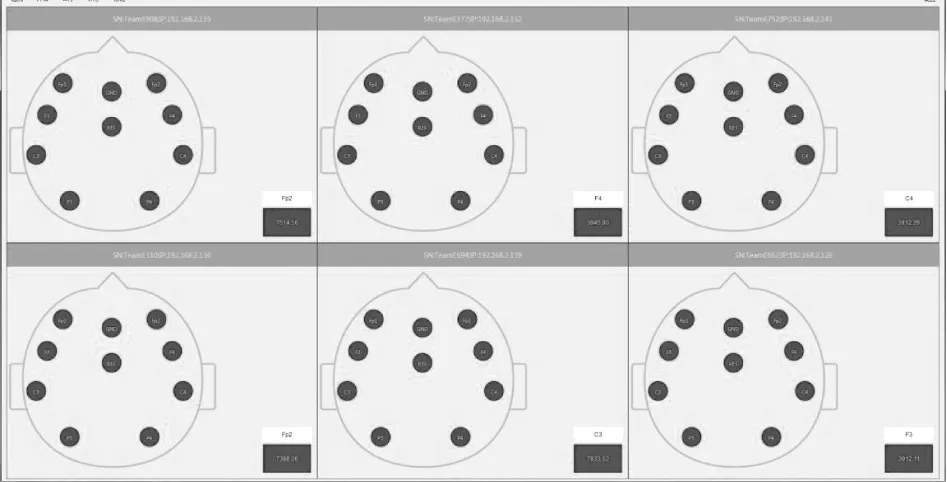
圖8 阻抗測試界面
在完成以上幾個步驟之后,就可以開始采集腦電信號。采集系統中8個采集通道對應著一片區域的腦電信號。采集腦電信號如圖9所示,波形數據可以保存到本地,進行離線分析,也可實時傳輸數據。
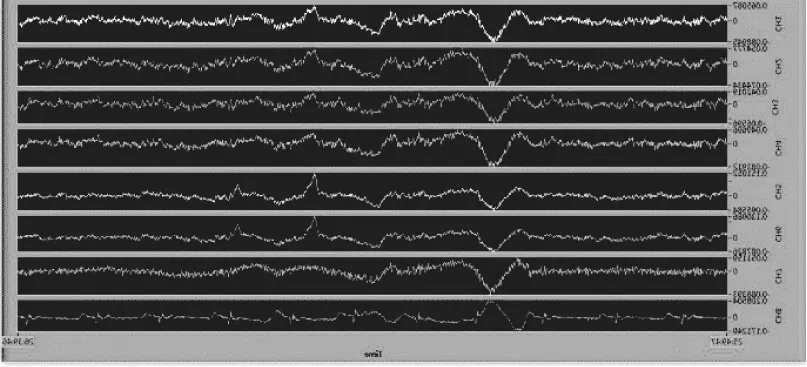
圖9 腦電信號采集上位機圖
3.4.2 信號特征提取及處理
典型相關分析方法(CCA)是研究多個變量與多個變量之間相關性的算法,可以滿足本設計采用8通道信號采集的特點,其基本思想是找出兩組變量X和Y在整體上的相關系數ρ并使其最大。定義多通道SSVEP信號為Xn,

式(1)中,n為通道編號,Xnfm是原始SSVEP腦電信號經過小波包分解重構的fm頻段的信號。建立相應的參考信號矩陣為:

然后求得最大的相關系數

式(3)中,cov(Xn,Y)為 Xn和 Y 的協方差,σXn和 σY分別為Xn和Y的標準差。
將SSVEP信號進行小波包分解之后得到重構信號,根據CCA算法計算出各個通道的Xn和Y的最大相關系數ρm,然后比照判斷SSVEP刺激信號的頻點fm。
4 腦控飛行器識別測試
通過ERP采集盒子信號處理之后,我們最終的目的是需要這些信號變成我們讓飛行器識別的控制命令。系統測試需要飛行器在上電幾秒鐘后升起,懸停在一定的高度進入待控制狀態,測試者集中精力注視LCD上的方向刺激源控制飛行器。從表3中可以分析,同一個測試者對不同的目標頻率會產生不同的響應,而對于相同的目標頻率,不同的測試者也會產生不同的響應。可見個體之間存在差異性,符合生物學中的人體各異觀點。
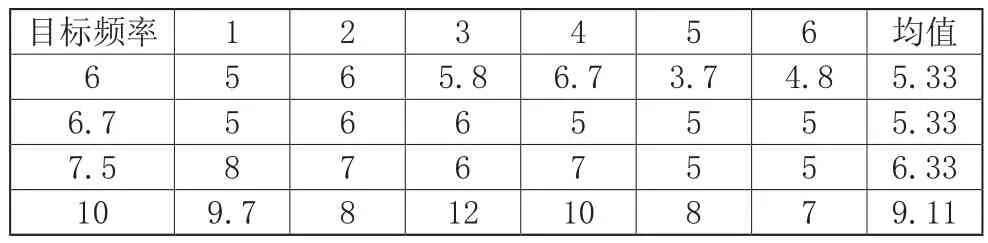
表3 目標頻率特征識別對比
5 總結
本設計主要完成了以下工作:設計了基于Labview的LCD視覺刺激器,根據顯示器60Hz的特性選定了需要閃爍的頻率,其中刺激源的個數和閃爍的頻率可以通過軟件控制,這是不同于其他刺激器的一個特點;設計和完成了四軸飛行器的各個模塊搭建,并能正常飛行;實現了微型四旋翼飛行器四個方向由腦電信號控制。
此外,由于每個人的腦電信號現象不一至,且在測試采集中很容易受外界噪音以及眼睛眨動等肌電干擾,所以如何確保采集到高質量的腦電信號還有待進一步的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
