基于CAN總線的船用起重機(jī)自動(dòng)定位控制系統(tǒng)設(shè)計(jì)
2019-01-30 06:37:04杜思遠(yuǎn)
艦船科學(xué)技術(shù) 2019年1期
陳 東,唐 崢,杜思遠(yuǎn)
(中國船舶重工集團(tuán)公司第七一三研究所,河南鄭州 450015)
0 引 言
船用起重機(jī)在船舶建造和使用中應(yīng)用較為廣泛,經(jīng)過多年的研究和發(fā)展,我國在船用起重運(yùn)輸機(jī)械設(shè)計(jì)制造方面取得了顯著發(fā)展。然而隨著現(xiàn)場(chǎng)總線技術(shù)、工業(yè)自動(dòng)化、智能化技術(shù)研發(fā)和應(yīng)用,市場(chǎng)對(duì)起重機(jī)工作性能、安全可靠性、自動(dòng)化程度、設(shè)備故障監(jiān)控診斷能力與智能化水平都提出更高要求。例如要求滿足自動(dòng)定位,能夠?qū)崿F(xiàn)實(shí)時(shí)通信,建立以起重機(jī)為基礎(chǔ)的存儲(chǔ)和監(jiān)控網(wǎng)絡(luò)等[1]。針對(duì)這種發(fā)展趨勢(shì),本文選用CAN總線作為現(xiàn)場(chǎng)總線,利用模糊PID控制算法控制多路電液比例閥的開度,實(shí)現(xiàn)了船用起重機(jī)的自動(dòng)定位與控制。
1 概述
1.1 起重機(jī)結(jié)構(gòu)
該船用起重機(jī)主要由基座、起重臂組、液壓系統(tǒng)、自動(dòng)控制系統(tǒng)等組成。基座用于支承和水平轉(zhuǎn)動(dòng)起重臂組,主要由回轉(zhuǎn)機(jī)構(gòu)、支撐座等組成;起重臂組主要功能是在其他系統(tǒng)的配合下對(duì)重物進(jìn)行調(diào)運(yùn),起重臂組主要由基本臂、主臂、伸縮臂、油缸、起升機(jī)構(gòu)等組成;液壓系統(tǒng)用于向基座和起重臂組提供動(dòng)力,主要由油箱、泵站電機(jī)、液壓泵、多路電液比例閥等組成。自動(dòng)控制系統(tǒng)用于控制起重臂組及液壓系統(tǒng),完成重物的吊裝任務(wù),自動(dòng)控制系統(tǒng)主要由主控計(jì)算機(jī)、控制箱、傳感器組、報(bào)警器等組成。起重機(jī)的結(jié)構(gòu)如圖1所示。
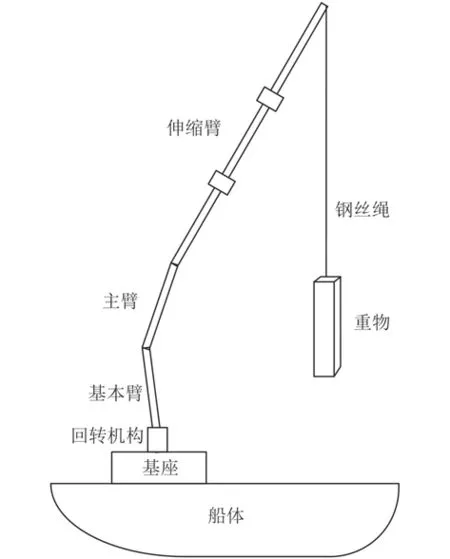
圖1 起重機(jī)結(jié)構(gòu)Fig. 1 Structure of Crane
1.2 CAN總線
隨著計(jì)算機(jī)技術(shù)、自動(dòng)化技術(shù)和通信技術(shù)的發(fā)展,現(xiàn)場(chǎng)總線控制系統(tǒng)(FCS)正在逐步取代集散控制系統(tǒng)(DCS),廣泛應(yīng)用于工業(yè)控制系統(tǒng)[2]。目前現(xiàn)場(chǎng)設(shè)備中主要采用的現(xiàn)場(chǎng)總線有CAN總線、Profibus DP/PA總線、InterBus總線和Modbus總線等。CAN總線由于其高性能、高可靠性和其獨(dú)特設(shè)計(jì),在各種自動(dòng)化控制領(lǐng)域得到廣泛應(yīng)用[3]。CAN總線具有通信方式靈活、多主方式及面向事件的信息傳輸、非破壞性總線仲裁技術(shù)、傳輸距離遠(yuǎn)、節(jié)點(diǎn)數(shù)較多等特點(diǎn)。
2 起重機(jī)控制系統(tǒng)總體設(shè)計(jì)
2.1 控制系統(tǒng)構(gòu)成
工控機(jī)作為控制系統(tǒng)的主控制器,利用PCI-1680通信卡進(jìn)行數(shù)據(jù)采集,通過CAN總線、多路電液比例閥控制起重機(jī)完成重物的自動(dòng)轉(zhuǎn)運(yùn)任務(wù),并通過編碼器檢測(cè)補(bǔ)給起重機(jī)工作的實(shí)時(shí)位置信息,構(gòu)成閉環(huán)控制系統(tǒng)。控制系統(tǒng)的結(jié)構(gòu)如圖2所示。
為了能夠準(zhǔn)確地控制起重機(jī)吊鉤,需要對(duì)其位置進(jìn)行實(shí)時(shí)跟蹤判斷,分別對(duì)起重機(jī)的回轉(zhuǎn)角位置、主臂與基本臂之間夾角位置、伸縮臂伸縮位置及卷揚(yáng)位置等4路物理量進(jìn)行實(shí)時(shí)檢測(cè)。要提高系統(tǒng)的控制精度,關(guān)鍵在于提高采樣反饋信號(hào)的精度,需要采用光電編碼器作為本系統(tǒng)的直線位移或角位移測(cè)量元件。
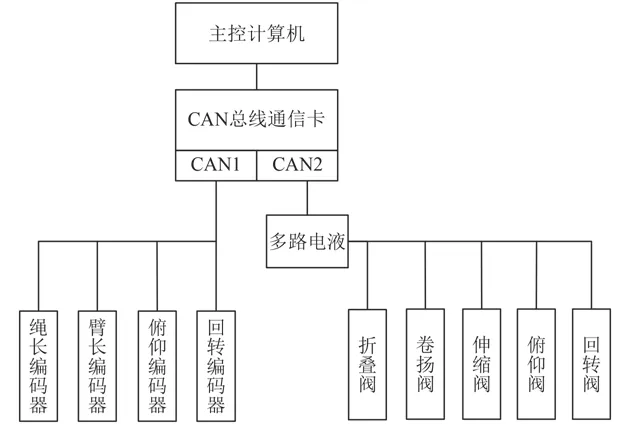
圖2 控制系統(tǒng)結(jié)構(gòu)Fig. 2 Structure of control system
傳感器組由4個(gè)CAN總線接口的絕對(duì)值旋轉(zhuǎn)編碼器和2個(gè)恒力開度裝置組成,分別用于測(cè)量起重機(jī)的回轉(zhuǎn)角度、俯仰角度、伸縮臂長度和卷揚(yáng)繩索長度。絕對(duì)值旋轉(zhuǎn)編碼器選用Pepperl+Fuchs公司生產(chǎn)的ENA42HD-S系列重載編碼器,恒力開度裝置選用ECN40HD系列。因此,絕對(duì)值編碼器分別將回轉(zhuǎn)角位置、主臂俯仰角位置、伸縮臂伸縮位移和卷揚(yáng)位移、通過CAN總線接口輸入到主控計(jì)算機(jī)中。
多路閥選用WALVOIL公司生產(chǎn)的DPC130型電液比例多路閥,該多路閥由進(jìn)油閥體、5個(gè)工作閥片和回油閥體組成。多路閥支持CAN總線協(xié)議,主控計(jì)算機(jī)通過電纜與多路閥的電磁鐵相連,通過控制比例電磁鐵電流大小來改變閥芯的位置,從而改變通過閥口的液壓油流量,進(jìn)而控制各執(zhí)行機(jī)構(gòu)的運(yùn)動(dòng)速度,速度與流量呈線性關(guān)系。
2.2 坐標(biāo)轉(zhuǎn)換
要對(duì)吊鉤位置進(jìn)行實(shí)時(shí)控制,需掌握其在直角坐標(biāo)系空間中的位置,故需要進(jìn)行坐標(biāo)變換,分別定義直角坐標(biāo)系和廣義坐標(biāo)系。
直角坐標(biāo)系:以甲板面起重機(jī)旋轉(zhuǎn)中心為原點(diǎn),甲板面為x-y平面,x軸正向指向存儲(chǔ)位置;y軸為x軸繞原點(diǎn)逆時(shí)針旋轉(zhuǎn)至90°位置;z軸垂直甲板面指向上方。廣義坐標(biāo)系:α為起重機(jī)旋轉(zhuǎn)自由度,存儲(chǔ)方向?yàn)?,俯視時(shí)逆時(shí)針方向?yàn)檎沪聻橹鞅坌D(zhuǎn)自由度,水平方向?yàn)?,在垂向平面(XZ平面)觀察時(shí),逆時(shí)針方向?yàn)檎籐f為主臂長度,L為伸縮臂長度,γ為伸縮臂完全展開時(shí)伸縮臂與主臂之間的夾角,r1和h0分別表示主臂原點(diǎn)到旋轉(zhuǎn)中心之間的水平距離和垂直高度,rp表示繩長,原點(diǎn)在吊臂頂端定滑輪中心,指向下方為正。
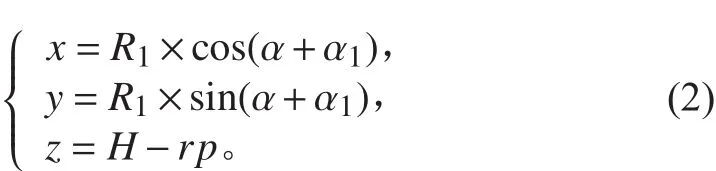
廣義坐標(biāo)-直角坐標(biāo)變換:

由于主臂與伸縮臂不在同一平面內(nèi),主臂與伸縮臂中心距約為r,R1為修正后的回轉(zhuǎn)半徑,可得
主臂與R1之間的夾角為 α1=arcsin(r/R1),得
2.3 調(diào)運(yùn)策略
為了安全起見,在實(shí)際重物自動(dòng)調(diào)運(yùn)過程中采取定臂長的策略,調(diào)運(yùn)過程中同時(shí)控制回轉(zhuǎn)、俯仰、卷揚(yáng)3個(gè)自由度運(yùn)動(dòng),從而到達(dá)目標(biāo)位置。以時(shí)間為目標(biāo)函數(shù),采取同時(shí)到達(dá)和定高的控制策略,對(duì)回轉(zhuǎn)、俯仰、卷揚(yáng)各通道的流量進(jìn)行分配。
根據(jù)各自由度速度-流量增益:回轉(zhuǎn)a L/(°),俯仰b L/(°),卷揚(yáng)c L/m,吊載區(qū)俯仰角速度-卷揚(yáng)線速度跟蹤因子為dm/(°)。為實(shí)現(xiàn)吊鉤定高,俯仰和卷揚(yáng)的流量分配比為b:(c/d);為了使回轉(zhuǎn)和俯仰同時(shí)到達(dá)目標(biāo)位置,將液壓管路的總流量分配給回轉(zhuǎn)閥、俯仰閥和卷揚(yáng)閥。可得回轉(zhuǎn): 俯仰: 卷揚(yáng)=aα:bβ:(c/d)β(α、β分別為廣義坐標(biāo)系下到目的位置回轉(zhuǎn)與俯仰的偏移量)。
通過主控計(jì)算機(jī)直接輸出控制量,從而控制電液比例閥的流量,控制各自由度進(jìn)行運(yùn)動(dòng),通過編碼器獲取起重機(jī)實(shí)時(shí)位置,構(gòu)成閉環(huán)控制系統(tǒng)。由于控制量死區(qū)、摩擦、齒輪間隙、比例閥小流量不穩(wěn)定等因素的影響,起重機(jī)在啟動(dòng)和停止階段存在非線性,傳統(tǒng)的PID控制算法很難滿足需求,本文設(shè)計(jì)了一種基于模糊自整定PID控制器的控制方法。
3 模糊PID控制設(shè)計(jì)
模糊PID控制基本思想是運(yùn)用模糊數(shù)學(xué)的理論,利用模糊規(guī)則表進(jìn)行表示,然后根據(jù)控制系統(tǒng)的響應(yīng)進(jìn)行模糊推理,從而實(shí)現(xiàn)PID參數(shù)的在線修正,構(gòu)成模糊PID控制器[4-5]。
根據(jù)起重機(jī)運(yùn)動(dòng)系統(tǒng)的特性,本文設(shè)計(jì)了一個(gè)二維模糊控制器,以誤差e及其誤差變化率de模糊化后作為輸入變量,根據(jù)預(yù)先設(shè)定的模糊規(guī)則進(jìn)行模糊推理,得到3個(gè)模糊參數(shù),將這3個(gè)參數(shù)解模糊處理得到PID控制器的參數(shù)調(diào)整量作為輸出變量。圖3為模糊PID控制結(jié)構(gòu)框圖。
將模糊變量分為7級(jí),分別是{PB,PM,PS,ZO,NS,NM,NB},這樣總結(jié)控制規(guī)律比較方便且處理速度較快。模糊變量值確定后,需要建立模糊量和等級(jí)量之間的隸屬關(guān)系,即確定模糊子集隸屬函數(shù)的形狀。隸屬度函數(shù)選取不對(duì)稱三角形。控制規(guī)則貯存在數(shù)表中,便于更改,最后用重心法合成輸出控制量。
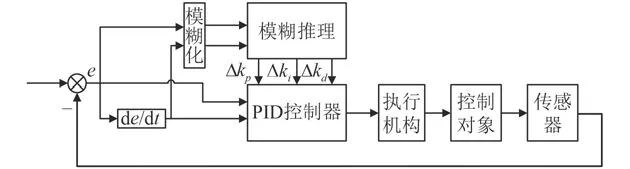
圖3 模糊PID控制Fig. 3 Fuzzy-PID Control System
模糊控制器的核心是建立模糊規(guī)則表,根據(jù)電液比例閥的穩(wěn)態(tài)特性、響應(yīng)速度等特點(diǎn)建立模糊規(guī)則表, ?kp,? ki,? kd的模糊規(guī)則如表1所示。
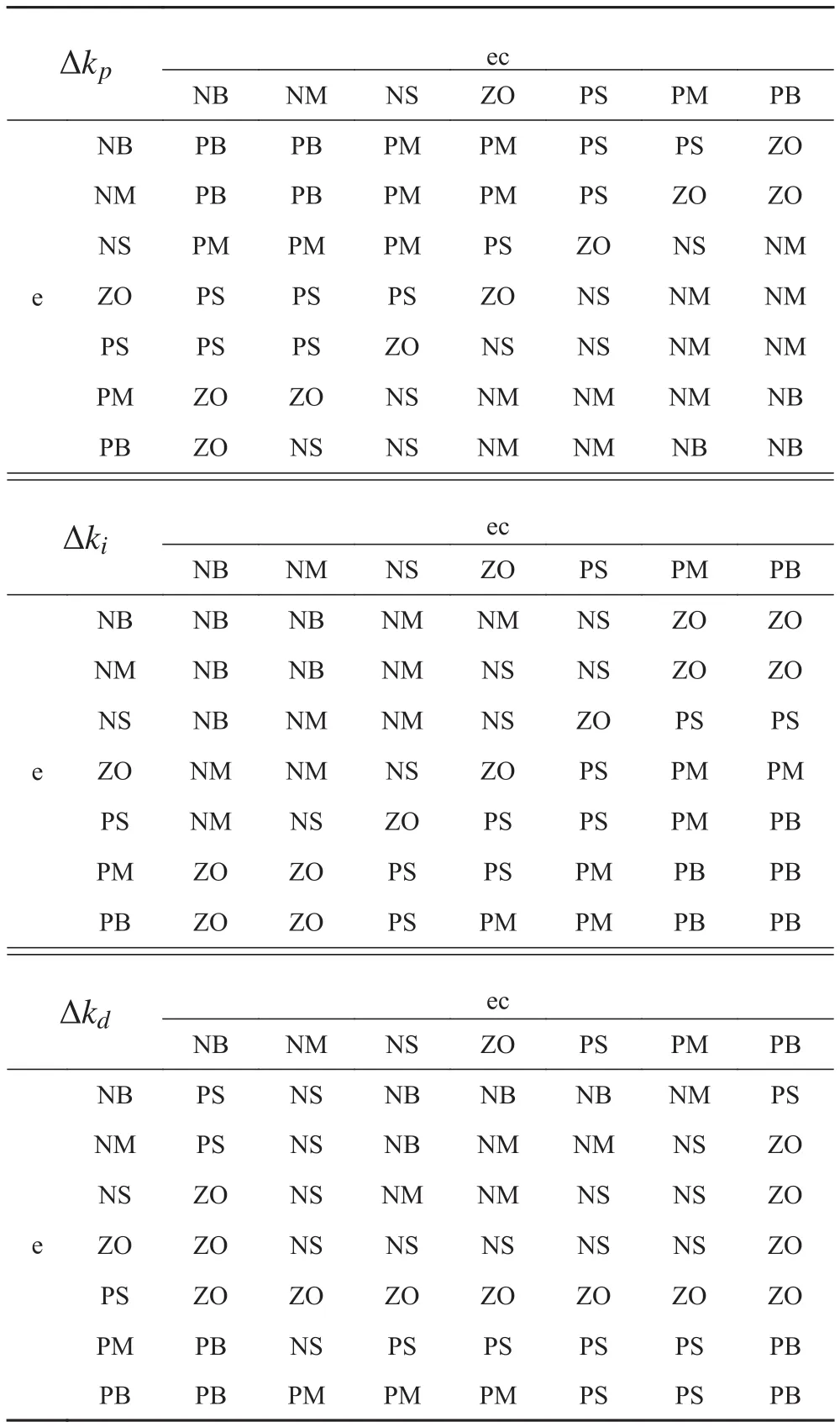
表1 ? kp, ?ki , ?kd 模糊規(guī)則表Tab. 1 ?kp,?ki , ?kd fuzzy rule
最后一步為輸出解模糊,計(jì)算輸出各模糊變量隸屬度函數(shù)三角形被各隸屬度水平截成梯形的重心,分別計(jì)算各梯形然后相加時(shí),應(yīng)當(dāng)Li減去重疊部分的面積。
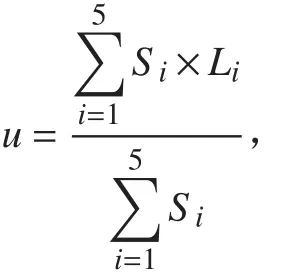
其中:Si為各梯形面積;Li為各梯形重心的距離。
4 試驗(yàn)驗(yàn)證
在Labview環(huán)境下進(jìn)行開發(fā),實(shí)現(xiàn)人機(jī)界面和模糊PID控制算法,主要有CAN口設(shè)置、功能選擇、手動(dòng)控制、電液比例閥狀態(tài)顯示、實(shí)時(shí)位置讀取、自動(dòng)定位控制等功能,如圖4所示。
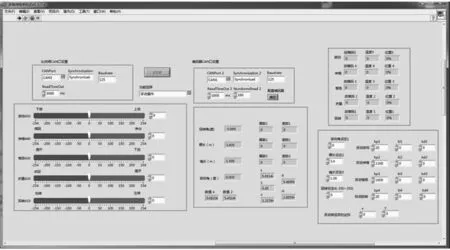
圖4 起重機(jī)自動(dòng)定位控制界面Fig. 4 Crane automatic positioning control interface
選取2個(gè)特征位置分別使用傳統(tǒng)PID控制算法和模糊PID控制算法進(jìn)行自動(dòng)轉(zhuǎn)運(yùn),分別計(jì)算直角坐標(biāo)系下水平方向距目標(biāo)位置的誤差和吊鉤高度的變化誤差H=z-z2,如圖5所示。
試驗(yàn)結(jié)果表明,模糊PID控制效果明顯好于傳統(tǒng)PID控制,動(dòng)態(tài)調(diào)整時(shí)間提升了3.1 s,定位精度提高了0.032 m,吊鉤高度最大誤差縮小了0.070 m。
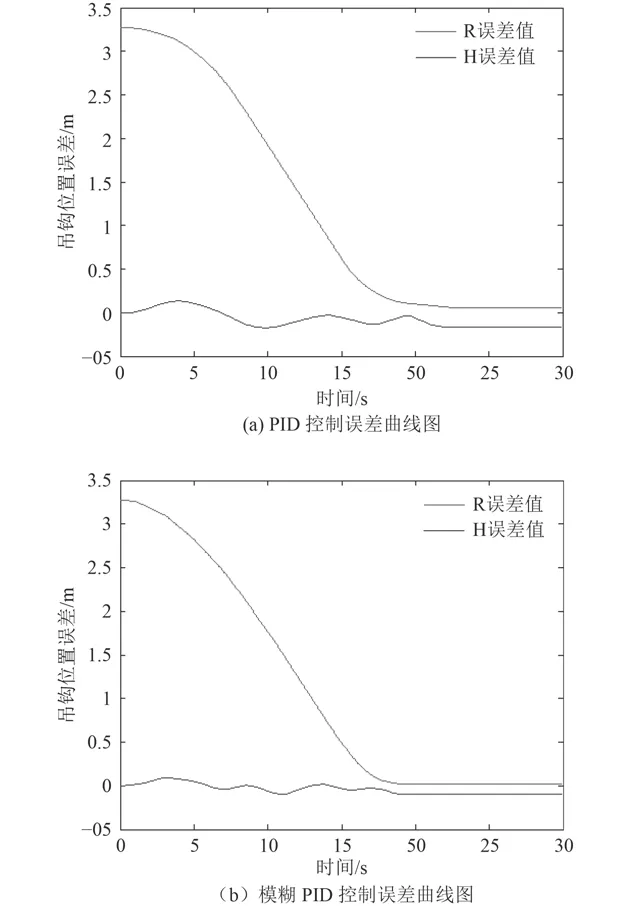
圖5 起重機(jī)自動(dòng)轉(zhuǎn)運(yùn)位置誤差曲線圖Fig. 5 Position error curve of crane automatic transfer