混流法式水輪機(jī)調(diào)節(jié)系統(tǒng)非線性建模與分叉分析
2019-02-07 05:32:15張記坤曾云王芳芳楊光波張振凱錢晶
軟件導(dǎo)刊 2019年12期
張記坤 曾云 王芳芳 楊光波 張振凱 錢晶


摘要:基于Matlab仿真軟件,考慮彈性水擊對(duì)水輪機(jī)調(diào)節(jié)系統(tǒng)的影響,建立彈性水擊水輪機(jī)微分代數(shù)模型,并與調(diào)速器和發(fā)電機(jī)共同構(gòu)成水輪機(jī)調(diào)節(jié)系統(tǒng)非線性模型。在此基礎(chǔ)上運(yùn)用非線性動(dòng)力學(xué)分叉理論對(duì)PID調(diào)速器參數(shù)進(jìn)行Hopf分叉行為研究,得出PID參數(shù)三維分叉曲面、二維分叉曲線及穩(wěn)定域,并通過對(duì)時(shí)域圖、相軌跡圖等的綜合分析,得到取不同調(diào)速器參數(shù)時(shí)系統(tǒng)的非線性動(dòng)力學(xué)特性,為機(jī)組PID參數(shù)選擇提供理論依據(jù)。最后通過系統(tǒng)仿真得出,在小擾動(dòng)下線性模型和非線性模型均能適用,在大擾動(dòng)下非線性模型能更真實(shí)地反映機(jī)組動(dòng)態(tài)特性。
關(guān)鍵詞:彈性水擊;非線性模型;Hopf分叉;分叉曲面;動(dòng)力學(xué)特性
DOI:10.11907/rjd k.191317
中圖分類號(hào):TP301 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1672-7800(2019)012-0102-06
0引言
水輪機(jī)調(diào)節(jié)系統(tǒng)是由壓力引水系統(tǒng)、調(diào)速器、水輪機(jī)、發(fā)電機(jī)以及所在電網(wǎng)組成的包含水、機(jī)、電的復(fù)雜綜合閉環(huán)控制系統(tǒng),其中調(diào)節(jié)對(duì)象為復(fù)雜的非線性、非最小相位系統(tǒng),且在不同工況下,各環(huán)節(jié)慣性常數(shù)與系統(tǒng)參數(shù)均有所不同。傳統(tǒng)對(duì)水輪機(jī)調(diào)節(jié)系統(tǒng)的分析多是采用剛性水擊假設(shè)條件下的水輪機(jī)線性模型,而忽略了管道彈性作用及系統(tǒng)的非線性屬性,對(duì)于小波動(dòng)擾動(dòng)暫可用來分析其動(dòng)態(tài)調(diào)節(jié)過程,但隨著機(jī)組壓力引水系統(tǒng)越來越復(fù)雜,管道的彈性水擊效應(yīng)不能被忽視,同時(shí)由于調(diào)節(jié)對(duì)象的非線性特性,運(yùn)用剛性水擊線性模型研究機(jī)組調(diào)節(jié)動(dòng)態(tài)不利于系統(tǒng)安全穩(wěn)定運(yùn)行方案的實(shí)施以及控制規(guī)律的優(yōu)化設(shè)計(jì)。基于此,本文在文獻(xiàn)[8]給出的管道彈性水擊數(shù)學(xué)模型基礎(chǔ)上,將該模型轉(zhuǎn)化為非線性微分方程形式,而水輪機(jī)出力采用IEEE提出的非線性模型代數(shù)方程,二者共同構(gòu)成水輪機(jī)的微分代數(shù)系統(tǒng)模型,并結(jié)合發(fā)電機(jī)一階模型與PID調(diào)速器一起組成水力發(fā)電機(jī)組的非線性調(diào)節(jié)系統(tǒng)。
針對(duì)非線性問題的研究,常用方法有微分幾何理論、分叉理論、混沌理論、模糊理論等。其中Hopf分叉理論是非線性動(dòng)力學(xué)中一種分析系統(tǒng)參數(shù)對(duì)系統(tǒng)穩(wěn)定性影響的重要方法,是一種局部的動(dòng)態(tài)分叉理論,具體是指隨著分叉參數(shù)的變化,系統(tǒng)在平衡點(diǎn)處突然分叉出極限環(huán)的現(xiàn)象,被廣泛應(yīng)用于各類復(fù)雜的非線性動(dòng)力學(xué)問題研究中。本文運(yùn)用Hopf分岔理論對(duì)構(gòu)建的非線性調(diào)節(jié)系統(tǒng)模型在頻率擾動(dòng)和負(fù)荷擾動(dòng)兩種工況下進(jìn)行分叉分析,得出PID參數(shù)在空間中的分叉臨界曲面、二維分叉曲線及系統(tǒng)穩(wěn)定域范圍,并深入研究了當(dāng)調(diào)速器參數(shù)變化時(shí)系統(tǒng)的動(dòng)態(tài)特性,為調(diào)速器參數(shù)選擇提供理論參考。
1水輪機(jī)調(diào)節(jié)系統(tǒng)非線性模型
單機(jī)單管、無(wú)調(diào)壓井水輪機(jī)系統(tǒng)非線性模型如圖1所示。其中,y為導(dǎo)葉開度相對(duì)值;q為水輪機(jī)流量相對(duì)值;qn1為水輪機(jī)空載流量相對(duì)值;qo為水輪機(jī)初始工況流量相對(duì)值;h為水輪機(jī)水頭相對(duì)值;hq為水輪機(jī)暫態(tài)水頭相對(duì)值;f為水頭損失系數(shù);At為水輪機(jī)增益,一般為常數(shù);pm為水輪機(jī)出力相對(duì)值;D為水力阻尼因子。
管道動(dòng)態(tài)是指水輪機(jī)流量變化引起的水輪機(jī)水頭變化。對(duì)照?qǐng)D1可知,水力系統(tǒng)傳遞函數(shù)是從流量變化q到水輪機(jī)暫態(tài)水頭△hq的變化,根據(jù)文獻(xiàn)[8]提出的彈性水擊傳遞函數(shù)模型,并依據(jù)文獻(xiàn)[23]中對(duì)于n取高階時(shí)的對(duì)比研究,彈性水擊時(shí)n取1已能滿足研究要求,故n=1時(shí)彈性水擊傳遞函數(shù)為:
該模型綜合了水機(jī)電過程中各因素的相互作用,且模型物理意義清晰、適用范圍廣,在一定程度上反映了機(jī)組的非線性特性。
2Hopf分叉直接代數(shù)判據(jù)
在該曲面上任取一點(diǎn),kp=1.5,Ki=1.083,kd=0-3,仿真結(jié)果如圖4所示。由圖可知機(jī)組此時(shí)處于周期等幅振蕩狀態(tài),振蕩周期約為14.3s,相軌跡圖出現(xiàn)穩(wěn)定的極限環(huán)。所以在參數(shù)選擇不恰當(dāng)時(shí),系統(tǒng)可能出現(xiàn)持續(xù)的等幅振蕩,使機(jī)組難以穩(wěn)定。
在分叉曲面或曲線上下方區(qū)域各取數(shù)點(diǎn)進(jìn)行動(dòng)態(tài)仿真,得出機(jī)組的轉(zhuǎn)速偏差時(shí)域圖、導(dǎo)葉開度偏差時(shí)域圖、流量變化時(shí)域圖以及相軌跡圖,深人探究機(jī)組在該區(qū)域的穩(wěn)定特性。現(xiàn)取曲面上方任意一點(diǎn),kp=1.5,Ki=1.15,kd=03,各參數(shù)變化如圖5所示。
同時(shí),在分叉曲面上方再任取一點(diǎn),kp=1.5,Ki=1.25,Ka=0.3,各參數(shù)變化如圖6所示。
由圖5、圖6可知,在分叉曲面或Kd=0.3分叉曲線上方取點(diǎn),機(jī)組各參數(shù)均處于發(fā)散狀態(tài),所以曲面或曲線上方區(qū)域?yàn)椴环€(wěn)定區(qū)域。由各參數(shù)偏差幅度來看,距分叉曲面或曲線越遠(yuǎn)的點(diǎn),機(jī)組不穩(wěn)定程度越大。
由圖7、圖8可知,在分叉曲面或Kd=0.3分叉曲線下方區(qū)域,機(jī)組各參數(shù)均處于收斂狀態(tài),所以曲面或曲線下方區(qū)域?yàn)榉€(wěn)定區(qū)域,且距分叉曲面或曲線越遠(yuǎn),機(jī)組穩(wěn)定速度越快,所以調(diào)速器參數(shù)應(yīng)在遠(yuǎn)離曲面的區(qū)域進(jìn)行選擇。同時(shí)由圖3可知,隨著微分增益的增加,系統(tǒng)的穩(wěn)定域范圍逐漸擴(kuò)大,表明PID調(diào)速器的微分環(huán)節(jié)有利于保持非線性系統(tǒng)的穩(wěn)定性,與微分環(huán)節(jié)的作用相符。
擾動(dòng)值△mg=1,r=0。由此可計(jì)算出非線性系統(tǒng)的平衡點(diǎn)為(088,0,0,0,0.88,0.88/K,),將平衡點(diǎn)代人公式可計(jì)算出該系統(tǒng)在平衡點(diǎn)處的Jacobi矩陣及其特征多項(xiàng)式,進(jìn)而代入Hopf分叉判據(jù),可得在機(jī)組由空載到額定負(fù)荷過程中PID參數(shù)三維分叉曲面以及二維分叉曲線,如圖9、圖10所示。
同理,在該曲面上任取一點(diǎn),Kp=1.5,ki=1.1418,kd=0.3,機(jī)組轉(zhuǎn)速變化時(shí)域如圖11所示。由仿真曲線可知,此時(shí)機(jī)組處于等幅振蕩狀態(tài),振蕩周期約為14.3s,與頻率擾動(dòng)下機(jī)組振蕩周期基本一致。
同時(shí),在該分叉曲面上方任取一點(diǎn),kp=1.5,Ki=13,kd=0.3,仿真結(jié)果如圖12所示。此時(shí)機(jī)組轉(zhuǎn)速變化與水輪機(jī)流量變化隨時(shí)間推移作周期增幅振蕩,此時(shí)機(jī)組處于不穩(wěn)定狀態(tài),所以分叉曲面上方為不穩(wěn)定區(qū)域。
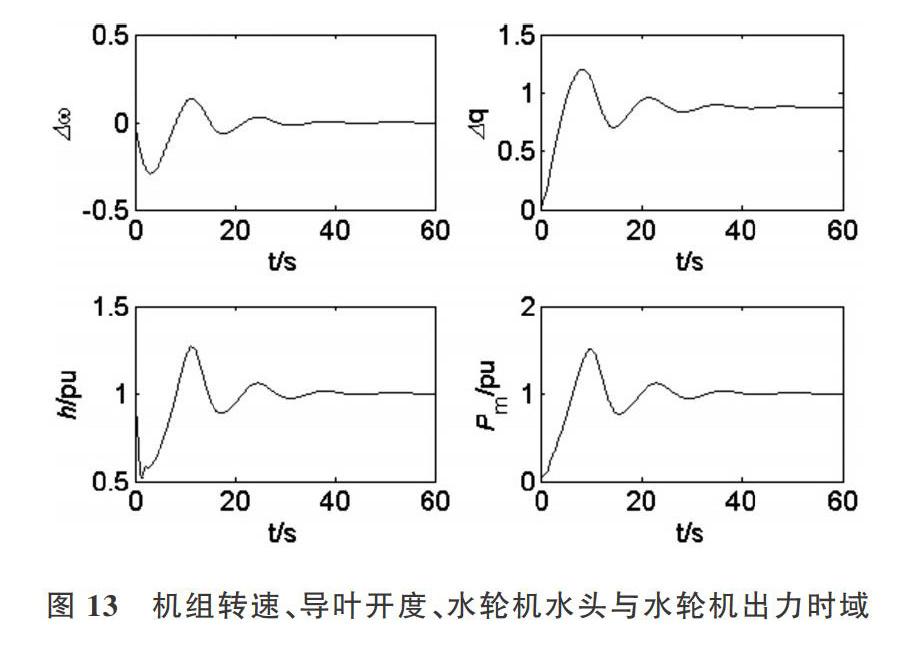
同時(shí),在分叉曲面下方任取一點(diǎn)進(jìn)行仿真分析,kp=1.5,ki=0.8,Kd=0.3,如圖13所示。由圖可知,此時(shí)機(jī)組轉(zhuǎn)速和流量變化逐漸趨于穩(wěn)定。由于管道較短,摩擦損失小,故水輪機(jī)水頭穩(wěn)定后變化不大,水輪機(jī)出力由空載時(shí)的0增加至額定負(fù)荷,此時(shí)機(jī)組處于穩(wěn)定狀態(tài)。
3.3頻率擾動(dòng)與負(fù)荷擾動(dòng)分叉圖對(duì)比
頻率擾動(dòng)和負(fù)荷擾動(dòng)是機(jī)組在運(yùn)行過程中最常見的兩種工況,也是機(jī)組進(jìn)行穩(wěn)定性試驗(yàn)不可或缺的兩種試驗(yàn)方式,所以在機(jī)組進(jìn)行頻率和負(fù)荷調(diào)節(jié)時(shí),調(diào)速器參數(shù)選擇是否合理對(duì)于機(jī)組穩(wěn)定性有著十分重要的影響。故將機(jī)組進(jìn)行頻率擾動(dòng)及負(fù)荷擾動(dòng)下的調(diào)速器參數(shù)分叉曲面與分叉曲線進(jìn)行對(duì)比分析,如圖14所示。
由圖14可知,在頻率和負(fù)荷兩種擾動(dòng)條件下,調(diào)速器參數(shù)所構(gòu)成的分叉曲面形狀相似,分叉曲線變化一致,且下方區(qū)域均為穩(wěn)定域。但在頻率和負(fù)荷擾動(dòng)下的穩(wěn)定域范圍略有差異,在負(fù)荷擾動(dòng)下的穩(wěn)定域范圍略大。理論上而言,為保證兩種擾動(dòng)下機(jī)組均處于穩(wěn)定狀態(tài),在調(diào)速器參數(shù)選擇時(shí)應(yīng)盡量在頻率擾動(dòng)下的分叉曲面或曲線下方區(qū)域進(jìn)行選擇,才能在頻率和負(fù)荷擾動(dòng)下均獲得較好的控制效果。
3.4模型對(duì)比
水輪機(jī)調(diào)節(jié)系統(tǒng)分為線性模型和非線性模型,理論上而言,當(dāng)機(jī)組受到小擾動(dòng)時(shí),線性模型基本能滿足仿真要求;當(dāng)機(jī)組受到大擾動(dòng)時(shí),線性模型已不能滿足仿真對(duì)精度的要求,需要建立非線性模型。所以為了探索兩種模型在不同擾動(dòng)下的動(dòng)態(tài)特性,分別對(duì)減10%、20%、50%負(fù)荷擾動(dòng)下的機(jī)組過渡過程進(jìn)行仿真,機(jī)組轉(zhuǎn)速偏差響應(yīng)曲線如圖15所示。由圖可知:在減10%以及20%負(fù)荷小擾動(dòng)工況時(shí),兩種模型的過渡過程基本一致,說明非線性模型也適用于機(jī)組的小擾動(dòng)工況;在減50%負(fù)荷大擾動(dòng)暫態(tài)過程中,線性模型過渡過程的振蕩次數(shù)不變,穩(wěn)定時(shí)間也基本一致,這與實(shí)際情況有所出人。非線性模型中機(jī)組過渡過程的振蕩次數(shù)發(fā)生了變化,穩(wěn)定時(shí)間也不同,這是調(diào)速器在受到大擾動(dòng)時(shí)的快速動(dòng)作導(dǎo)致的,與實(shí)際情況吻合。所以在大擾動(dòng)過渡過程中,非線性模型更能真實(shí)反映機(jī)組動(dòng)態(tài)特性。
4結(jié)語(yǔ)
本文基于Matlab仿真軟件建立彈性水擊傳遞函數(shù),并建立水輪機(jī)調(diào)節(jié)系統(tǒng)非線性微分代數(shù)模型。以PID調(diào)速器參數(shù)作為分叉參數(shù),運(yùn)用分叉理論討論了混流式水輪發(fā)電機(jī)組在頻率擾動(dòng)和負(fù)荷擾動(dòng)兩種工況下機(jī)組調(diào)節(jié)系統(tǒng)的Hopf分叉現(xiàn)象,得出PID參數(shù)三維分叉曲面、二維分叉曲線及穩(wěn)定域,為機(jī)組PID參數(shù)選擇提供了理論參考。同時(shí)分析了在頻率和負(fù)荷擾動(dòng)下所構(gòu)成分叉曲面的穩(wěn)定域范圍,得出在選擇調(diào)速器參數(shù)時(shí),應(yīng)盡量在頻率擾動(dòng)下的分叉曲面下方區(qū)域進(jìn)行選擇,才能在頻率和負(fù)荷擾動(dòng)下都獲得較好的控制效果,但具體參數(shù)選擇仍要結(jié)合機(jī)組實(shí)際情況綜合考慮。最后仿真了在兩種模型下,機(jī)組受不同負(fù)荷擾動(dòng)時(shí)機(jī)組轉(zhuǎn)速變化情況,得出在小擾動(dòng)工況下兩種模型均適用,在大擾動(dòng)工況下非線性模型更能反映機(jī)組實(shí)際情況。