基于非凸低秩優化的壓縮感知植株圖像重構
2019-02-07 05:32:15沈躍李尚龍崔業民朱嘉慧劉加林
軟件導刊 2019年12期
沈躍 李尚龍 崔業民 朱嘉慧 劉加林
摘要:目標植株圖像壓縮重構對于圖像的高效傳輸及存儲意義重大,同時為后期植株生長狀態檢測及病蟲害識別奠定了基礎。傳統圖像壓縮感知方法大多是針對信號在某個特征空間的稀疏性進行的,并沒有考慮信號的局部特征與結構化特性,存在重構效率不高、重構精度較低等問題。針對以上情況,提出一種基于非凸低秩優化的壓縮感知植株圖像重構算法。首先通過KinectV2.0采集植株圖像深度數據并進行預處理,結合K-means與Mean-shift聚類算法提取目標植株有效區域,再考慮圖像的非局部自相似性,采用加權lp范數最小化算法(wsNM)求解低秩優化問題,較好地保留了圖像結構細節,最后采用Dog-leg最小二乘算法取代最快下降法進行迭代優化。試驗結果證明,該算法在不同采樣率下的植株圖像重構質量優于其它同類算法,尤其在低采樣率下重構效果更為突出。
關鍵詞:壓縮感知;圖像重構;低秩優化;聚類算法;Dog-Leg最小二乘法;深度信息
DOI:10.11907/rjdk.191237
中圖分類號:TP317.4 文獻標識碼:A 文章編號:1672-7800(2019)012-0173-07
0引言
隨著農業信息化與自動化的持續發展,圖像采集技術被廣泛運用于現代農業生產中,農田信息獲取技術已成為精準農業的關鍵技術之一。其中對目標植株圖像進行壓縮重構對于圖像的高效傳輸與存儲意義重大,同時也為后期植株生長狀態檢測及病蟲害識別奠定了基礎。因此,如何高質量、高速率地對圖像進行壓縮采集與重構已成為國內外機構的研究熱點。
在農業植株檢測與識別過程中,目標物體識別是首先需要解決的問題。吳煥麗等提出基于HSV空間的自適應果蠅均值聚類算法分割圖像背景,該算法加快了小麥圖像分割速度,一定程度上提高了小麥覆蓋率,但對于具有如滴灌帶等局部干擾因素的圖像分割效果并不突出;馬博珩等選用共軛梯度下降算法取代最快下降法,結合正交匹配追蹤算法進行圖像重構,初步提高了圖像重構速度,但處理過程中忽略了圖像的局部特征與結構化特性,重構精度并沒有得到太大改善,且該方法在迭代計算過程中不太穩定,容易出現貪婪問題;代媛等提出一種壓縮感知蘋果圖像的并行快速重構方法,該算法分析了二維正交匹配跟蹤重構算法的并行性,結合GPU通用并行計算平臺設計出對應的并行化重構算法,初步提高了蘋果圖像重構效率,但是并沒有保證蘋果圖像重構質量,且未能消除復雜背景;宋云等引入低秩矩陣恢復思想,考慮到圖像的非局部自相似性,將圖像恢復問題轉化成聚合的相似塊矩陣秩最小問題,有效提高了圖像重構質量,但其在迭代上也采用共軛梯度算法,從而影響到算法整體的穩定性和魯棒性。
因此,本文在前人研究的基礎上,提出一種基于非凸低秩優化的壓縮感知植株圖像重構算法。首先通過Ki-nect V2.0采集目標植株的彩色圖像和深度數據,對獲取的植株圖像進行深度預處理,并結合K-means和Mean-shift聚類算法提取目標植株有效區域;再考慮圖像的非局部自相似性,采用加權lp范數最小化算法求解低秩優化問題,較好保留了圖像結構細節;最后采用Dog-leg最小二乘算法取代最小二乘法進行迭代優化,以加快算法整體重構速度。該算法不僅解決了傳統重構算法重構精度低的問題,而且很大程度上提高了目標植株重構效率,對于農業中的相關控制決策具有一定指導意義。
1材料與方法
1.1植株圖像目標區域提取
1.1.1植株圖像采集
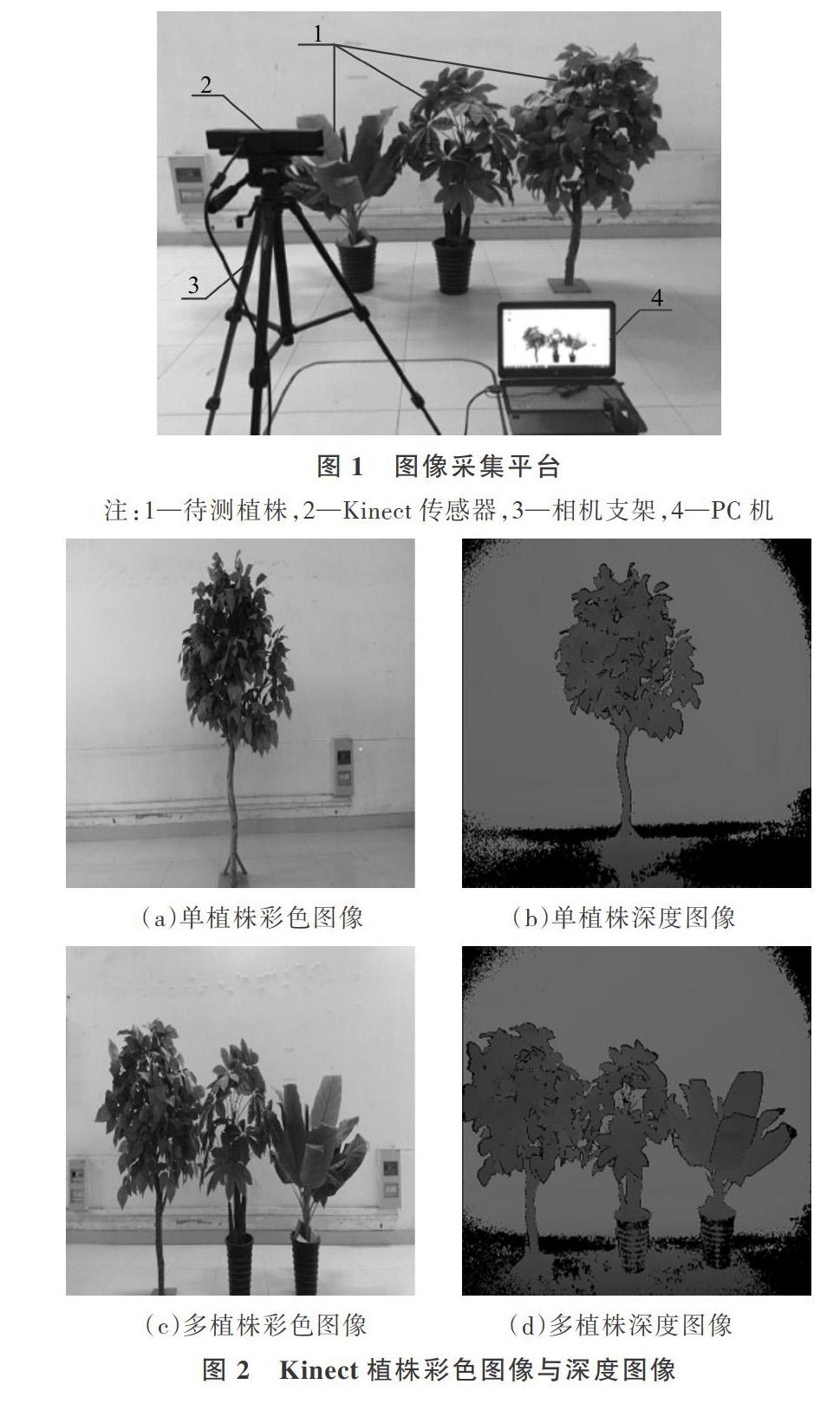
為了獲取目標植株的彩色圖像及深度數據,搭建如圖1所示的試驗平臺,主要包括Kinect二代傳感器、PC機、相機支架和若干待測植株。Kinect傳感器固定在相機支架上,通過USB延長線接口連至PC機,待測植株與Kinect傳感器之間距離約為1700mm。
試驗分為兩組進行:第一組目標植株為單植株,植株高度為1.8m;第二組目標植株為多植株,選取3棵不同高.度的待測植株,高度分別為14m、1.2m和1.0m。使用Ki-nect V2.0傳感器提供的Kinect for Windows SDK結合OpenCV庫獲取待測植株的彩色圖像和深度圖像,見圖2。
1.1.2深度數據預處理
由于采集到的植株圖像背景較為復雜,將嚴重影響后期圖像重構效率,如何去除植株背景干擾對于后期重構處理至關重要。Kinect傳感器采用TOF獲取空間的深度數據信息,合理設置待測植株與傳感器之間距離,即能將圖像中的待提取物從背景中分離出來。因此,本文根據Kinect傳感器的這一特征,采用彩色圖像和深度圖像相結合的方法提取目標植株關鍵區域。
Kinect傳感器識別的最佳限制距離范圍為1500-1800mm,因此本文將待測植株放置于傳感器前方約1700mm,通過圖像采集平臺(見圖1)采集圖像,進而通過距離限制初步將目標植株與背景分離。程序設置距離內的區域像素值為1,距離外的區域像素值為0。
1.13K-means與Mean-shih聚類算法
聚類分析算法是用于數據挖掘的一個重要算法,被廣泛運用在圖像分割、圖像融合等各個領域,其中以K-means算法最為常見。雖然K-means聚類相對簡單,對于數據集的處理效率也較高,但其初始聚類中心需要從n個數據對象中任意選擇,對于噪聲的魯棒性并不強,且想要達到最佳分割效果需要經過大量反復試驗,一定程度上增大了工作量。Mean-shift算法能夠在一組數據的密度分布中尋找到局部極值,并實現無參密度估計,即可對服從任意分布的數據進行密度估計。此外,Mean-shiN算法是一個單參數算法,容易作為一個模塊與其它算法進行集成。因此,本文將K-means聚類與Mean-shiN算法相結合,將Mean-shiN聚類后的質心作為K-means算法初始中心進行聚類,避免了因K-means初始中心不確定導致的大量試驗,具體流程如圖3所示。試驗結果表明初始聚類中心為2時,分割效果最好。
為了提高后續圖像重構效率,只需保留目標植株所在圖像區域,去除背景中其它干擾物。在進行深度數據處理得到的二值圖像基礎上,水平方向從上到下、從下往上依次對每一行求和,直到找到第一個非空白行為止,記為第m行、第n行;同樣,豎直方向從左往右、從右到左依次對每一列求和,直到找到第一個非空白列為止,記為第i列、第j列。在原彩色圖像上截取第m行~第n行、第i列~第j列的矩形區域,即為要提取的目標植株所在圖像區域。處理后的圖像如圖4所示。
圖4(a)、圖4(c)分別為Kinect傳感器拍攝的單植株和多植株圖像,圖4(b)、圖4(d)分別為對應去除復雜背景后的彩色圖像。其中黑色部分是被去除的無目標植株部分,保留了植株所在矩形區域。
1.2壓縮感知理論
壓縮感知理論主要由信號稀疏表示、測量矩陣與重構算法3部分組成。圖像壓縮感知重建觀測得到的隨機測量值,其維度遠小于原始圖像維度,目的在于通過觀測得到的一組隨機測量值復原原始圖像。具體而言,設原始信號f∈RN+1,在變換基ψ下的稀疏向量為x,即f=ψx。對原始信號廠進行測量,公式為:
由于上述最小lo范數方法是一個不確定多項式(NP)問題,同時對噪聲很敏感,很難直接進行優化且無法驗證其準確性,因此需要更加有效的重構算法對信號進行精確重構。
1.3加權lp范數非凸低秩優化
1.3.1非局部自相似與低秩特性
任意一幅圖像的結構信息都存在大量重復部分,其中隨便一個樣本塊,都能在該圖像中尋找出大量相似塊,并且這種相似結構不僅存在于平滑區域,在紋理及邊緣輪廓中也一樣存在。利用圖像的這種非局部自相似性,不僅能解決傳統重構算法中因未考慮信號局部特性和結構化特征導致的重構精度不高的問題,同時也提高了算法本身的適應性。提取部分圖像塊作為樣本塊,將與其相似的其它圖像塊統一按照行或列展開得到一維向量。以此類推,將得到的所有一維向量組合成二維相似塊矩陣。由于相似圖像塊之間結構紋理近似,即提取到的圖像相似塊一維向量之間具有強相關性,因此該二維相似塊矩陣具有低秩特性。從另一方面看,矩陣的秩也可作為矩陣稀疏性的衡量方法,即求解信號稀疏性的圖像重構問題可引申為基于秩最小化的圖像重構問題。
1.3.2加權lp范數低秩優化
2試驗與結果分析
為了驗證本文方法的正確性和有效性,本文通過MATLAB R2015處理平臺對該算法進行各項測試。試驗主機CPU配置為Intel Core i5,主頻為3.60GHz,內存為8G,操作系統為Window 10。圖像采用256×256植株圖作為測試對象,主要分為單植株圖像重構和多植株圖像重構兩種情況進行。每種情況均重復實驗200次,試驗中采用離散小波變換對圖像進行稀疏化表示,測量矩陣采用隨機高斯測量矩陣。
重構算法性能指標分為重構效率和重構精度兩類。重構效率用重構時間進行衡量,同等條件下重構時間T越小,重構效率越高;重構精度分為主觀性評價標準和客觀性評價標準兩種。主觀標準主要指通過視覺感知判斷一幅圖的清晰度,本文采用結構相似度(sSIM)進行衡量,相同條件下SSIM越高,重構精度越高;客觀標準則可以由峰值信噪比(PSNR)表示,相同條件下PSNR越高,重構精度越高。
2.1不同p值下單植株圖像重構效果對比
通過植株圖像采集平臺獲取單植株彩色圖像,經過深度數據預處理以及K-means與Mean-shift聚類算法提取植株圖像目標區域并轉化成灰度圖。對于p值選取,在0.1-1范圍內以0.1為步長進行,分別在采樣率(M/N)為0.05、0.10、0.15、0.20、0.25、0.30的情況下對圖像進行重構。選取峰值信噪比作為評價指標,具體情況如圖5所示。
由圖5可以看出,在不同采樣率下,當p值取0.8時,峰值信噪比最高,植株重構效果最好。同時,由于傳統壓縮感知重構算法大多屬于最小lo范數或最小l1范數算法,因此本文的非凸低秩加權lp范數最小化算法重構效果明顯優于其它傳統算法。
為了從視覺角度更直觀地說明重構效果,選取采樣率(M/N)為0.15時,單植株在p值為0.4、0.8、1.0時的重構效果圖,如圖6所示。選取葉片末梢及枝干部分進行放大并置于右上角處,從圖中可以看出,p為0.4時,植株圖像重構的偽影較多,葉片輪廓等具體信息不夠清晰;p為1.0時,重構質量有所提高,但從右上角部分放大圖可以發現,暗影部分依舊存在;p=0.8時,植株重構效果最好,暗影明顯減少,同時葉片末梢及枝干處的輪廓等細節信息都得到了很好保留,在直觀視覺感受方面有很大程度提高。
2.2不同算法下植株圖像重構效果對比
為了評估提出算法的性能及魯棒性,本文針對采集到的單植株和多植株圖像,分別測試測量值有噪和無噪情況下的重建性能。
2.2.1無噪情況下植株重構對比情況
以采集到的單植株圖像為例,經過預處理之后提取植株目標區域,選取采樣率(M/N)為0.15時當前主流的壓縮感知重構算法TV、BM3D-CS、NLR與本文提出算法(p=0.8)進行對比,具體如圖7所示。
重構過程中選取葉片末梢及枝干處進行放大并置于圖像右上角,以便觀察細節。從圖中可以看出,在TV算法下由于局部平滑特性較弱,重構效果不太理想,圖像暗影較多,特別是枝干處較為模糊,不能很好地適應復雜紋理;BM3D-CS算法下的重構效果與其相比得到了很大程度提高,從放大部分可以看出,暗影已有明顯減少;對于NLR-CS與本文提出的重構算法,低秩正則項的引人很好地利用了圖像的非局部特征和結構特性,整體效果優于前兩種算法,而相比之下,由右上角的局部放大圖可以看出,本文算法下枝干處的偽影幾乎全部消失,葉片末梢及輪廓等細節信息也更好地得到保留,效果優于NLR-CS算法。
為了定量分析4種算法下單植株圖像的重構效果,本文采用重構時間T、結構相似度SSIM以及峰值信噪比PSNR 3種評價標準在采樣率(M/N)為0.1、0.15、0.20、0.25、0.30情況下進行對比分析,具體情況如表1所示。
從表1可以看出,在運行時間方面,TV算法重構時間最長,BM3D-CS和NLR-CS兩種算法重構速度比較接近,而本文算法相比其它3種算法,重構速度有了很大提高,比TV算法提高了2.796s,比NLR-CS算法提高了1.510s,且采樣率越大,速度差越大;在峰值信噪比(PSNR)方面,本文算法具有很大優勢,與其它3種算法相比,依次平均提高了14.24dB、7.08dB和2.47dB;同時,在結構相似度(sSIM)方面,相比于TV和BM3D-CS兩種算法,本文算法與NLR-CS算法效果最佳且比較接近,在采樣率為0.30時,SSIM分別達到了0.9912和0.9947。由此可以看出,經過深度數據預處理以及K-means和Mean-shift聚類算法提取出植株圖像目標區域后,去除了背景中不必要的干擾,一定程度上提高了后期重構速度,并且采用Dog-Leg最小二乘算法作為迭代算法,在有效提高收斂速度的同時,也保障了算法的整體重構精度。
2.2.2含噪情況下植株重構對比情況
為了評估算法在含噪狀態下的魯棒性,本文在測量值中加入不同量級的噪聲進行測試,比較各種算法的重建性能。
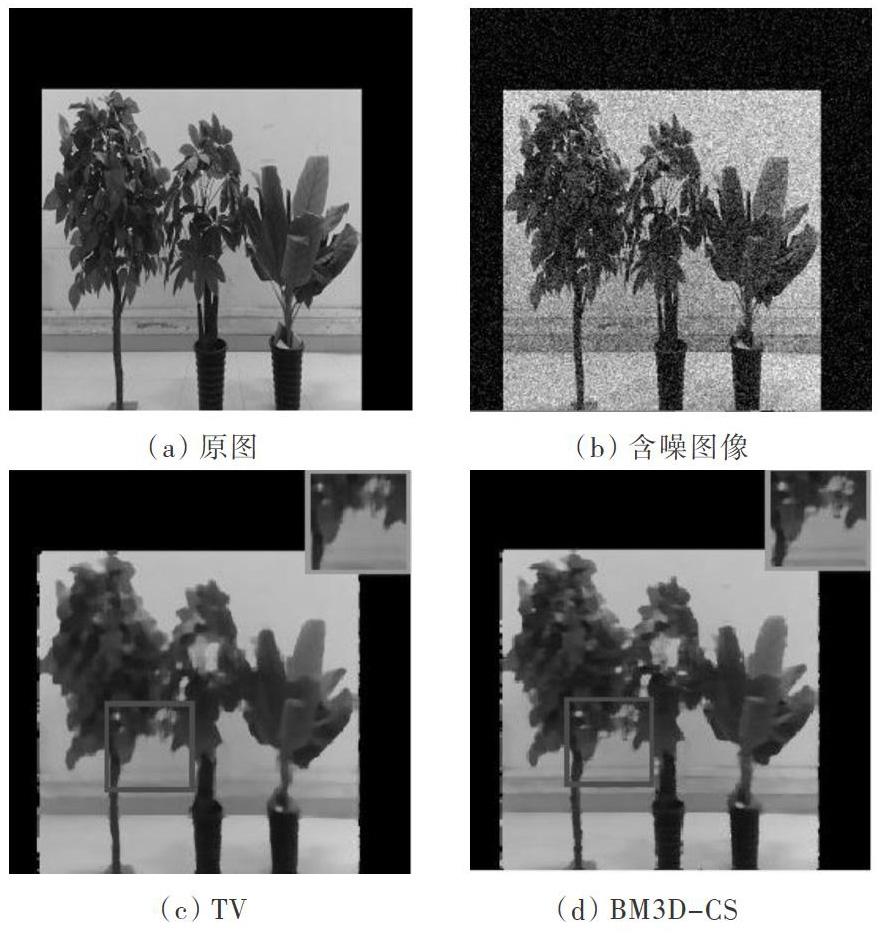
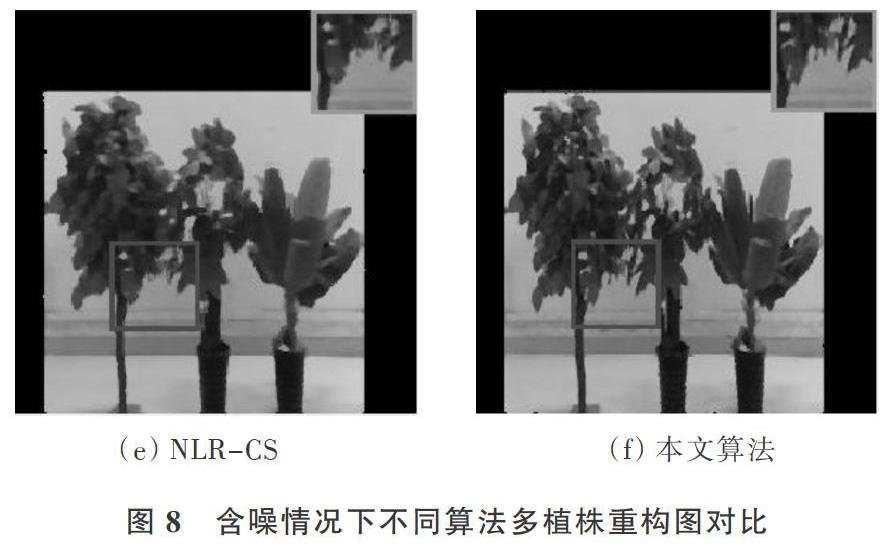
以采集的多植株圖像為例,噪聲選取高斯白噪聲,均值為0,標準差為0.01,經過預處理之后提取植株目標區域,同樣選取采樣率(M/N)為0.15時,當前主流的壓縮感知重構算法TV、BM3D-CS、NLR-CS與本文算法(p=0.8)進行對比,具體如圖8所示。重構過程中選取前兩棵植株樹干及葉片末梢部分進行放大,并置于圖片右上角以便于觀察圖像細節信息。
由圖8可以看出,在直觀的視覺感受上,當采樣率(M/N)為0.15時,TV算法對于加噪之后的植株圖像重構結果很模糊,樹葉的輪廓、紋理等細節信息丟失嚴重,整體效果類似于油畫;BM3D-CS和NLR-CS兩種算法相比TV算法整體效果有所改善,但左邊第一棵樹的樹葉密集處依舊比較模糊;本文算法對于加噪之后的多植株圖像重構效果最佳,3棵植株樹葉處的紋理都比較清晰,從右上角的局部放大圖可以發現,葉片輪廓等細節信息也很好地得到了保留。
為了定量分析含噪環境中圖像在不同算法下的重構效果對比情況,圖9給出了在采樣率為0.15時,多植株圖像在測量值受不同量級高斯白噪聲影響的環境下,不同算法的重建性能曲線。橫軸為圖像感知測量值的信噪比(singal to Noise Ratio,SNR),范圍為15~35dB,步長為5,縱軸為重建圖像的峰值信噪比PSNR。
可以直觀地看出,在采用TV和BM3D-CS兩種算法時,圖像重構精度起初增長較快,但后期隨著測量值信噪比的增大,曲線增長幅度逐漸減小,而NLR-CS算法與本文算法的重構效果增長趨勢較為穩定,其中可明顯看出,本文算法在含噪環境下的重建性能依然優于其它對比算法,取得了很好的重構效果。
3結語
傳統圖像壓縮感知方法大多是針對信號在某個特征空間的稀疏性進行的,并沒有考慮信號局部特征和結構化特性,存在重構效率不高、重構精度較低等問題。本文針對這些情況,提出一種基于非凸低秩優化的壓縮感知植株圖像重構算法。首先通過Kinect V2.0采集植株圖像的深度數據并進行預處理,結合K-means與Mean-shih聚類算法提取目標植株有效區域,再考慮圖像的非局部自相似性,采用加權lp范數最小化算法求解低秩優化問題,較好地保留了圖像結構細節,最后采用Dog-leg最小二乘算法取代最快下降法進行迭代優化。同時,為了評估提出算法的性能及魯棒性,本文針對采集的單植株和多植株圖像分別測試了測量值有噪與無噪狀態下的重建性能。試驗結果證明,本文算法在不同采樣率下的植株圖像重構質量都優于其它同類算法,尤其在低采樣率下重構效果更為突出。
(1)本文通過Kinect傳感器采集植株圖像深度數據并進行預處理,同時結合K-means和Mean-shift聚類算法提取目標植株有效區域,去除了背景中不必要的其它干擾物,為提高后期重構效率提供了可能。
(2)考慮到圖像的非局部相似性與結構特性,本文采用加權lp范數最小化算法求解低秩優化問題,較好地保留了圖像結構細節,一定程度上提高了植株圖像重構精度。試驗結果證明,在不同采樣率下,p值不同,重構效果也不同。當p值取0.8時,重構精度最高。因此可以得出,非凸低秩加權lp范數最小化算法重構效果明顯優于其它傳統算法。
(3)結合Dog-Leg最小二乘算法,避免了最快下降法運算過程中因過于貪婪導致的收斂速度減慢的情況,同時混合了GaussNewton法的特性,保證了算法整體的穩定性。試驗結果證明,Dog-Leg法加快了收斂速度,提高了算法整體重構效率,并在一定程度上改善了圖像重構精度。
(4)本文分別在無噪和含噪環境下對采集到的單植株與多植株圖像進行試驗。結果證明,在兩種環境下,本文算法不論在重構效率還是重構精度上,效果都優于NLR-CS等其它當前主流的壓縮感知算法。
(5)該方法也可進一步推廣應用于其它場合的圖像采集中,以實現基于Kinect傳感器的農業植株生長狀態監測以及病蟲害防治。