Simulink軟件在混沌系統(tǒng)滑模控制實(shí)驗(yàn)中的應(yīng)用
2019-02-11 13:08:02趙海濱于清文顏世玉
中國教育技術(shù)裝備 2019年18期
趙海濱 于清文 顏世玉
摘 ?要 對于三階Jerk混沌系統(tǒng),采用滑模控制器進(jìn)行平衡控制。在滑模控制器的設(shè)計(jì)中采用線性滑模面和指數(shù)趨近律。采用雙曲正切函數(shù)代替符號函數(shù),用于削弱抖振的影響。通過Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng),滑模控制器能夠進(jìn)行混沌系統(tǒng)的平衡控制。該仿真實(shí)驗(yàn)有助于學(xué)生對系統(tǒng)仿真、混沌控制和滑模控制的理論理解和工程應(yīng)用。
關(guān)鍵詞 滑模控制;混沌系統(tǒng);Simulink;仿真實(shí)驗(yàn);MATLAB
中圖分類號:G642.423 ? ?文獻(xiàn)標(biāo)識碼:B
文章編號:1671-489X(2019)18-0033-04
Application of Simulink Software in Sliding Mode Control Ex-periment of Chaotic System//ZHAO Haibin, YU Qingwen, YAN Shiyu
Abstract For the third order Jerk chaotic system, the sliding mode controller is used for balance control. Linear sliding surface and ex-
ponential reaching law are used in the design of sliding mode con-
troller. The hyperbolic tangent function is used instead of the sign
function to weaken the effect of chattering. The simulation experi-ment system is built by using Simulink software, the sliding mode
controller can balance the chaotic system. The simulation experiment
is helpful for students to understand the theory of system simulation,
chaos control and sliding mode control and to apply it in engineering.
Key words sliding mode control; chaotic system; Simulink; simula-tion experiment; MATLAB
1 引言
混沌是一種看似充滿隨機(jī)性,而又滿足某種確定性的規(guī)律,它是確定性系統(tǒng)中存在的隨機(jī)概念。混沌可以用確定的動(dòng)力學(xué)方程來表示,是非線性系統(tǒng)普遍存在的現(xiàn)象,廣泛存在于自然界和人類社會(huì)中[1]。混沌系統(tǒng)對初始條件極其敏感,具有整體穩(wěn)定、局部不穩(wěn)定的非線性動(dòng)力系統(tǒng)。基于混沌系統(tǒng)的保密通信具有廣闊的應(yīng)用前景,是非線性科學(xué)領(lǐng)域的研究熱點(diǎn)。目前,越來越多的院校將混沌理論引入實(shí)驗(yàn)教學(xué)中,如蔡氏混沌電路的同步控制實(shí)驗(yàn)。混沌系統(tǒng)的控制和應(yīng)用是當(dāng)前人們研究的一個(gè)熱點(diǎn)問題。混沌系統(tǒng)的同步控制已經(jīng)在保密通信和圖像加密等領(lǐng)域取得廣泛應(yīng)用。Jerk混沌是典型的三階嚴(yán)反饋混沌系統(tǒng)[2],只采用單一的控制器就能進(jìn)行系統(tǒng)的平衡控制。Jerk混沌系統(tǒng)的特點(diǎn)是微分方程的形式簡潔,能夠通過硬件電路實(shí)現(xiàn)[3]。
滑模變結(jié)構(gòu)控制是現(xiàn)代非線性控制領(lǐng)域中的一種重要方法,具有很強(qiáng)的魯棒性、構(gòu)造過程簡單和應(yīng)用范圍廣等特點(diǎn),廣泛應(yīng)用于電機(jī)控制、機(jī)器人控制、飛行器控制和混沌控制等行業(yè)。滑模控制對建模不確定和外部干擾信號具有魯棒性,同時(shí)具有算法簡單和可靠性高等優(yōu)點(diǎn),對非線性系統(tǒng)的控制具有良好的控制效果[4]。
本文采用Simulink軟件建立Jerk混沌的滑模控制仿真實(shí)驗(yàn)系統(tǒng)。在滑模控制器的設(shè)計(jì)中,采用線性滑模面和指數(shù)趨近律。指數(shù)趨近律具有非常快的收斂速度,在接近滑動(dòng)模態(tài)時(shí)會(huì)出現(xiàn)抖振現(xiàn)象。在滑模控制器的設(shè)計(jì)中,為了抑制抖振現(xiàn)象,采用雙曲正切函數(shù)代替符號函數(shù),雙曲正切函數(shù)為連續(xù)函數(shù)。該仿真實(shí)驗(yàn)非常形象和直觀,只需要編寫很少的程序代碼,就能實(shí)現(xiàn)復(fù)雜的控制功能,能夠激發(fā)學(xué)生的學(xué)習(xí)興趣,有助于學(xué)生對系統(tǒng)仿真、混沌控制和滑模控制的理論理解和實(shí)際應(yīng)用,有助于學(xué)生開展探索性學(xué)習(xí),發(fā)揮學(xué)生的積極性和自主性。
2 Jerk混沌系統(tǒng)
自從1963年Lorenz發(fā)現(xiàn)混沌吸引子以來,人們逐漸認(rèn)識到自然界和人類社會(huì)中廣泛存在混沌現(xiàn)象。Jerk系統(tǒng)是美國物理學(xué)家Sprott基于計(jì)算機(jī)窮舉法所提出的一種三階自治混沌系統(tǒng)。對三階Jerk混沌系統(tǒng)的研究引起國內(nèi)外學(xué)者的廣泛關(guān)注。Jerk混沌系統(tǒng)的特點(diǎn)是方程形式簡潔,能夠通過電阻、電容和集成運(yùn)算放大器等硬件電路實(shí)現(xiàn)。Jerk混沌系統(tǒng)的狀態(tài)方程是典型的三階嚴(yán)反饋系統(tǒng)[2],只采用單一的控制器就能進(jìn)行系統(tǒng)的平衡控制。Jerk混沌系統(tǒng)具有三個(gè)狀態(tài)變量,但是只采用一個(gè)控制器就能實(shí)現(xiàn)系統(tǒng)的鎮(zhèn)定控制,因此在保密通信中具有廣泛的應(yīng)用價(jià)值。
Jerk混沌是典型的三階混沌系統(tǒng),其狀態(tài)方程表示為:
其中,f1(x)=sgn(x1)+sgn(x1+2)+sgn(x1-2),x1、x2和x3是Jerk混沌系統(tǒng)的狀態(tài)變量。Jerk混沌系統(tǒng)會(huì)產(chǎn)生四渦卷混沌吸引子。
根據(jù)Jerk混沌系統(tǒng)的狀態(tài)方程,采用Simulink軟件進(jìn)行系統(tǒng)的建模和仿真,采用ode45算法。ode45算法即四階—五階Runge-Kutta算法,是一種自適應(yīng)步長的常微分方程數(shù)值解法。Jerk混沌系統(tǒng)狀態(tài)變量x1和x2的二維相圖如圖1所示,狀態(tài)變量x1和x3的二維相圖如圖2所示。由圖1和圖2可以觀察到,Jerk系統(tǒng)產(chǎn)生了四渦卷混沌吸引子。
3 滑模控制器的設(shè)計(jì)
其中,k1為常數(shù),且k1>0。采用線性滑模面的滑模控制器將系統(tǒng)的滑模控制分為趨近模態(tài)和滑動(dòng)模態(tài)。系統(tǒng)從任意的初始狀態(tài)趨向滑模面的過程稱為趨近模態(tài),系統(tǒng)在滑模面上的運(yùn)行過程稱為滑動(dòng)模態(tài)。系統(tǒng)到達(dá)滑動(dòng)模態(tài)后,狀態(tài)變量漸進(jìn)收斂到零。
高為炳教授采用趨近律的概念,提出滑模控制系統(tǒng)的抖振抑制方法。在滑模控制器的設(shè)計(jì)中,常用的趨近律有等速趨近律、指數(shù)趨近律、冪次趨近律、快速冪次趨近律和雙冪次趨近律等。采用冪次趨近律、快速冪次趨近律或雙冪次趨近律進(jìn)行滑模控制器的設(shè)計(jì),控制輸入不會(huì)出現(xiàn)抖振現(xiàn)象,但是狀態(tài)變量不能收斂到零,而是收斂到穩(wěn)態(tài)誤差的界內(nèi)。
在滑模控制器的設(shè)計(jì)中采用指數(shù)趨近律。指數(shù)趨近律的表達(dá)式為:
根據(jù)Jerk混沌系統(tǒng)的狀態(tài)方程,采用線性滑模面和指數(shù)趨近律設(shè)計(jì)滑模控制器,并采用滑模控制器進(jìn)行Jerk混沌系統(tǒng)的鎮(zhèn)定控制。通過李雅普諾夫穩(wěn)定性理論對系統(tǒng)的穩(wěn)定性進(jìn)行證明,滑模控制器能夠進(jìn)行Jerk混沌系統(tǒng)的鎮(zhèn)定控制,狀態(tài)變量漸進(jìn)收斂到零。
在公式(5)的滑模控制器中存在符號函數(shù),當(dāng)滑模面為零時(shí),會(huì)出現(xiàn)抖振現(xiàn)象。抖振通常影響系統(tǒng)控制的精確性,會(huì)增加系統(tǒng)的能耗,而且可能激發(fā)系統(tǒng)中高頻未建模部分的強(qiáng)烈振動(dòng),甚至使系統(tǒng)產(chǎn)生振蕩或失去穩(wěn)定。抖振的抑制和削弱成為滑模控制研究中的重要課題。為了削弱抖振的影響,在滑模控制器中采用雙曲正切函數(shù)代替符號函數(shù)。雙曲正切函數(shù)是連續(xù)函數(shù),其表達(dá)式為:
4 仿真實(shí)驗(yàn)
MATLAB軟件具有強(qiáng)大的數(shù)學(xué)運(yùn)算能力,以及方便實(shí)用的繪圖功能,而且對問題的描述和求解符合人們的思維習(xí)慣和數(shù)學(xué)表達(dá)習(xí)慣,已經(jīng)成為虛擬仿真實(shí)驗(yàn)普遍采用的輔助設(shè)計(jì)工具。采用MATLAB軟件可以非常方便靈活地建立復(fù)雜的系統(tǒng),而且程序代碼比較短,容易實(shí)現(xiàn)。Simulink是MATLAB軟件的重要組成部分,功能強(qiáng)大、使用簡單方便,是一種有效的可視化仿真環(huán)境[5]。在Simulink仿真環(huán)境下,可以快速建立動(dòng)態(tài)系統(tǒng)的框圖模型,不需要編寫大量的程序。只需要調(diào)用各個(gè)庫中提供的模塊,就可以建立復(fù)雜的仿真實(shí)驗(yàn)系統(tǒng)。
在采用Simulink軟件進(jìn)行建模和仿真時(shí),通過普通Simulink模塊建立系統(tǒng)的仿真模型不是非常直觀。采用用戶自定義功能模塊庫中的MATLAB Function模塊可以非常容易地建立仿真模型,該模塊內(nèi)的代碼可以直接采用MATLAB
語言編寫[6]。仿真實(shí)驗(yàn)系統(tǒng)運(yùn)行后,仿真結(jié)果可以通過Simulink軟件的示波器進(jìn)行顯示,也可以將數(shù)據(jù)保存到軟件的工作空間中以便進(jìn)一步分析。
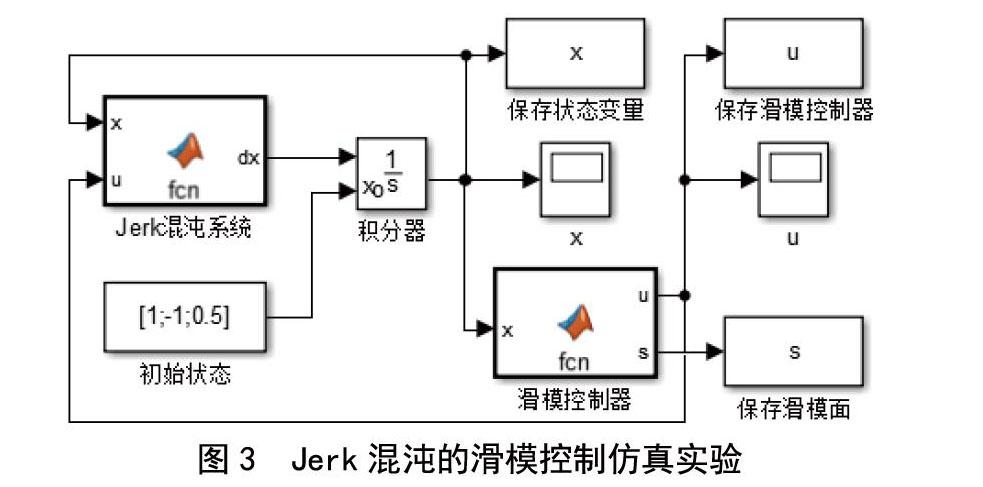
根據(jù)Jerk混沌系統(tǒng)的狀態(tài)方程和滑模控制器方程,采用Simulink軟件建立Jerk混沌的滑模控制仿真實(shí)驗(yàn)系統(tǒng),如圖3所示。
在圖3中,主要采用MATLAB Function模塊和積分模塊等。MATLAB Function模塊直接采用MATLAB語言建立模型和控制算法[7],非常靈活和方便。在仿真實(shí)驗(yàn)中,采用變步長的四階—五階Runge-Kutta算法,最大步長設(shè)定為0.000 1 s,仿真時(shí)間設(shè)定為4 s。Jerk混沌系統(tǒng)的初始狀態(tài)設(shè)置為x1(0)=1,x2(0)=-1,x3(0)=0.5。在線性滑模面公式中,參數(shù)設(shè)定為k1=6。在指數(shù)趨近律中,參數(shù)設(shè)定為k2=2,k3=1。在雙曲正切函數(shù)中,參數(shù)設(shè)定為δ=0.001。
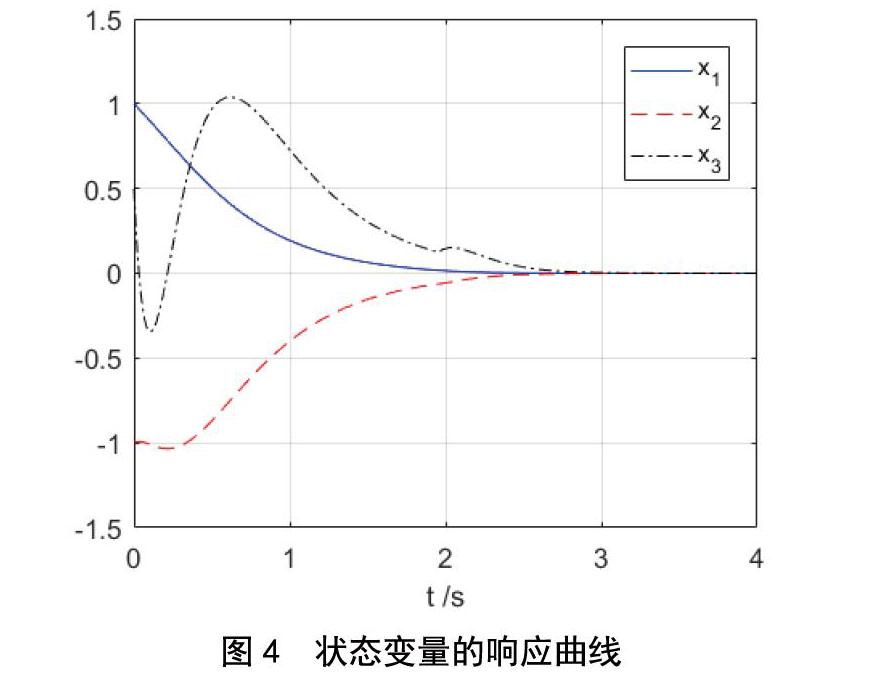
采用滑模控制器進(jìn)行Jerk混沌系統(tǒng)的平衡控制,仿真實(shí)驗(yàn)系統(tǒng)運(yùn)行后,狀態(tài)變量的響應(yīng)曲線如圖4所示。在圖4中,Jerk混沌系統(tǒng)的狀態(tài)變量漸進(jìn)收斂到零。
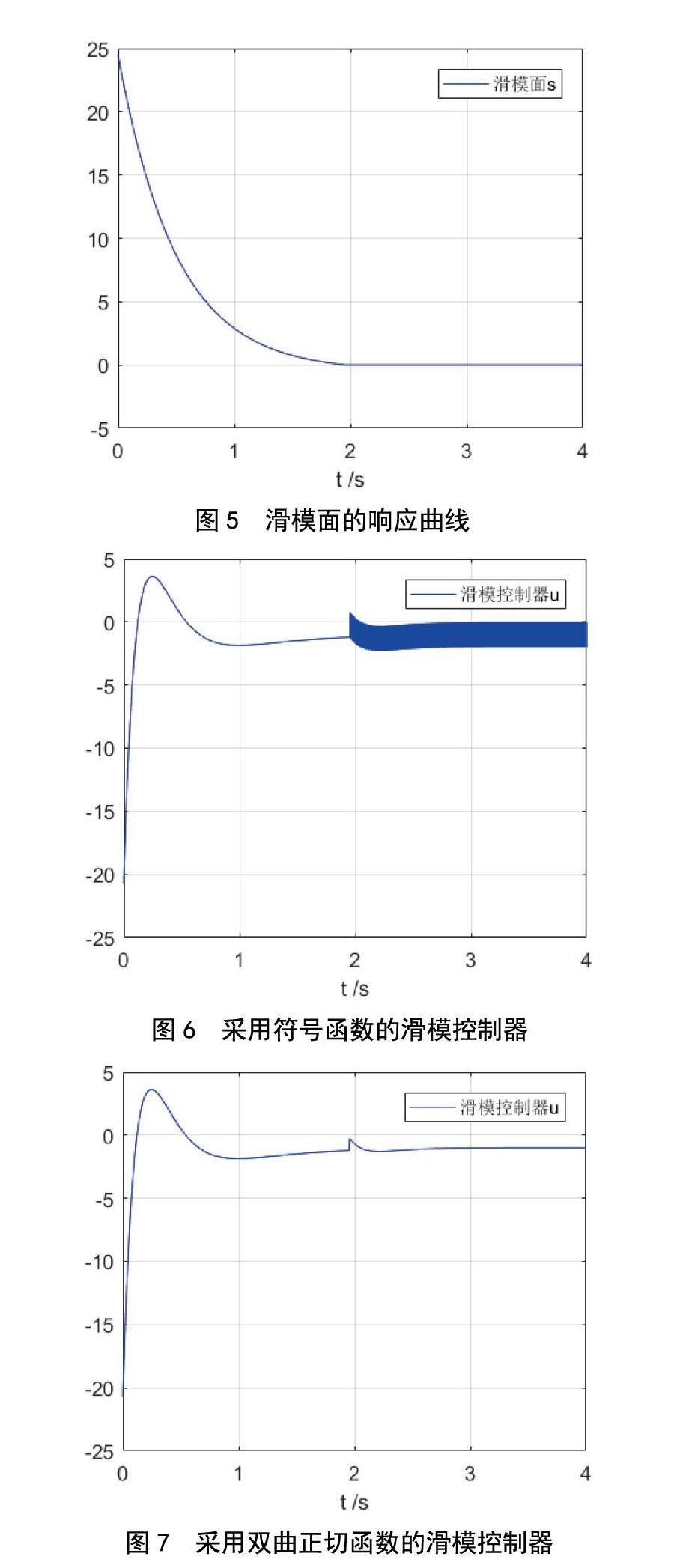
滑模面的響應(yīng)曲線如圖5所示,滑模面的初始值為24.5,滑模面快速收斂并在1.95 s基本收斂到零。
采用符號函數(shù)時(shí)滑模控制器的響應(yīng)曲線如圖6所示,采用雙曲正切函數(shù)時(shí),滑模控制器的響應(yīng)曲線如圖7所示。在圖6中,滑模控制器出現(xiàn)抖振現(xiàn)象。抖振不僅會(huì)影響控制的精確性、增加能耗,而且可能激發(fā)系統(tǒng)中高頻未建模部分的強(qiáng)烈振動(dòng),對系統(tǒng)造成危害。在圖7中,滑模控制器比較平滑,沒有出現(xiàn)抖振現(xiàn)象。
仿真結(jié)果表明,滑模控制器能夠進(jìn)行Jerk混沌系統(tǒng)的平衡控制,狀態(tài)變量漸進(jìn)收斂到零,采用雙曲正切函數(shù)代替符號函數(shù)能夠抑制抖振現(xiàn)象。
5 結(jié)語
本文采用滑模控制器進(jìn)行Jerk混沌系統(tǒng)的平衡控制,通過Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng)。在滑模控制器的設(shè)計(jì)中,采用線性滑模面和指數(shù)趨近律。為了削弱抖振的影響,采用雙曲正切函數(shù)代替符號函數(shù)。仿真結(jié)果表明,滑模控制器能夠進(jìn)行Jerk混沌系統(tǒng)的平衡控制,狀態(tài)變量漸進(jìn)收斂到零。通過Simulink軟件建立仿真實(shí)驗(yàn)系統(tǒng),方便學(xué)生動(dòng)手操作,使學(xué)生更易于修改實(shí)驗(yàn)?zāi)P停兄趯W(xué)生對系統(tǒng)仿真、混沌系統(tǒng)和滑模控制的理論進(jìn)行理解并實(shí)現(xiàn)工程應(yīng)用,有助于學(xué)生開展探索性學(xué)習(xí),發(fā)揮學(xué)生的積極性和自主性。
該仿真實(shí)驗(yàn)非常形象和直觀,只需要編寫很少的程序代碼,就能實(shí)現(xiàn)復(fù)雜的控制功能。學(xué)生可以將該仿真實(shí)驗(yàn)作為參考,對其他混沌系統(tǒng)進(jìn)行建模和分析,從而激發(fā)學(xué)習(xí)興趣和創(chuàng)新精神,培養(yǎng)編程能力和工程意識。
參考文獻(xiàn)
[1]孫克輝.混沌保密通信原理與技術(shù)[M].北京:清華大學(xué)出版社,2015.
[2]俞清,姜盼,陸菱,等.基于Jerk形式的多渦卷混沌電路[J].常州大學(xué)學(xué)報(bào):自然科學(xué)版,2016,28(2):83-87.
[3]呂恩勝,張繪敏.一種n-渦卷Jerk系統(tǒng)及其電路設(shè)計(jì)[J].貴州師范大學(xué)學(xué)報(bào):自然科學(xué)版,2014,32(6):76-80,84.
[4]劉金琨.滑模變結(jié)構(gòu)控制MATLAB仿真基本理論與設(shè)計(jì)方法[M].3版.北京:清華大學(xué)出版社,2015.
[5]石良臣.MATLAB/Simulink系統(tǒng)仿真超級學(xué)習(xí)手冊[M].北京:人民郵電出版社,2014.
[6]趙海濱,于清文,劉沖,等.基于Matlab/Simulink的混沌同步控制實(shí)驗(yàn)[J].實(shí)驗(yàn)室研究與探索,2019,38(1):16-19.
[7]趙海濱,劉沖,陸志國,等.基于Matlab/Simulink的欠驅(qū)動(dòng)機(jī)械臂仿真實(shí)驗(yàn)[J].實(shí)驗(yàn)技術(shù)與管理,2018,35(6):
135-138,143.