關于自動駕駛汽車與刑事責任的考察
2019-02-19 01:08:48松尾剛行
法治現代化研究 2019年1期
[日]松尾剛行
一、自動駕駛汽車現狀
2017年12月,深圳市首批智能公交車試運營;2017年12月,北京市交通委聯合市公安交管局、市經濟信息委等部門制定發布了《加快推進自動駕駛車輛道路測試有關工作的指導意見》和《自動駕駛車輛道路測試管理實施細則》,北京正式允許無人駕駛車上路測試;2018年2月,浙江宣布將建設首條超級高速公路,全面支持自動駕駛;2018年3月,全國首批3張智能網聯汽車開放道路測試號牌在上海發放。①彭文華:《自動駕駛車輛犯罪的注意義務》,載《政治與法律》2018年第5期。根據前瞻產業研究院發布的《2018—2023年中國無人駕駛汽車行業發展前景預測與投資戰略規劃分析報告》數據顯示,到2035年,中國在無人駕駛汽車市場上的份額將達到24%。
除了中國以外,現在很多國家都開始進行無人駕駛汽車的上路測試,然而,特斯拉、優步、谷歌以及蘋果等知名公司的無人駕駛汽車都發生過交通事故,在此背景下,自動駕駛汽車交通肇事有關的刑事責任,已成為世界刑法學者討論的新興問題。
為此,本文旨在通過借鑒德國②可參見[瑞士]薩賓娜·格萊斯、[德]艾米麗·西爾弗曼、[德]托馬斯·魏根特:《若機器人致害,誰將擔責?——自動駕駛汽車與刑事責任》,陳世偉譯,載陳興良主編:《刑事法評論》(第40卷),中國政法大學出版社2017年版,第338-356頁。與日本的經驗,論析自動駕駛汽車有關的刑事責任問題。本文將依據國際汽車工程師學會(Society of Automotive Engineers,簡稱SAE)制定的自動駕駛汽車分級標準,首先討論SAE第1等級到第3等級的自動駕駛汽車有關的刑事責任;然后討論SAE第4等級和第5等級的自動駕駛汽車有關的刑事責任。
二、自動駕駛汽車分級與控制權困境(Control Dilemma)
(一)SAE對自動駕駛汽車的定義
美國國家公路交通安全管理局(NHTSA)于2016年9月采用了SAE制定的自動駕駛汽車分級標準。根據駕駛任務的分擔、后備(緊急情況下的接管)的有無、設計運行區域的有無,SAE分級標準將自動駕駛分為0至5等級。③[日]內閣官房IT綜合戰略室:《圍繞自動駕駛等級之定義的動向與今后的對應(草案)》,載日本首相官邸官網,http://www.kantei.go.jp/jp/singi/it2/senmon_bunka/detakatsuyokiban/dorokotsu_dai1/siryou3.pdf,最后訪問時間:2018年9月3日。
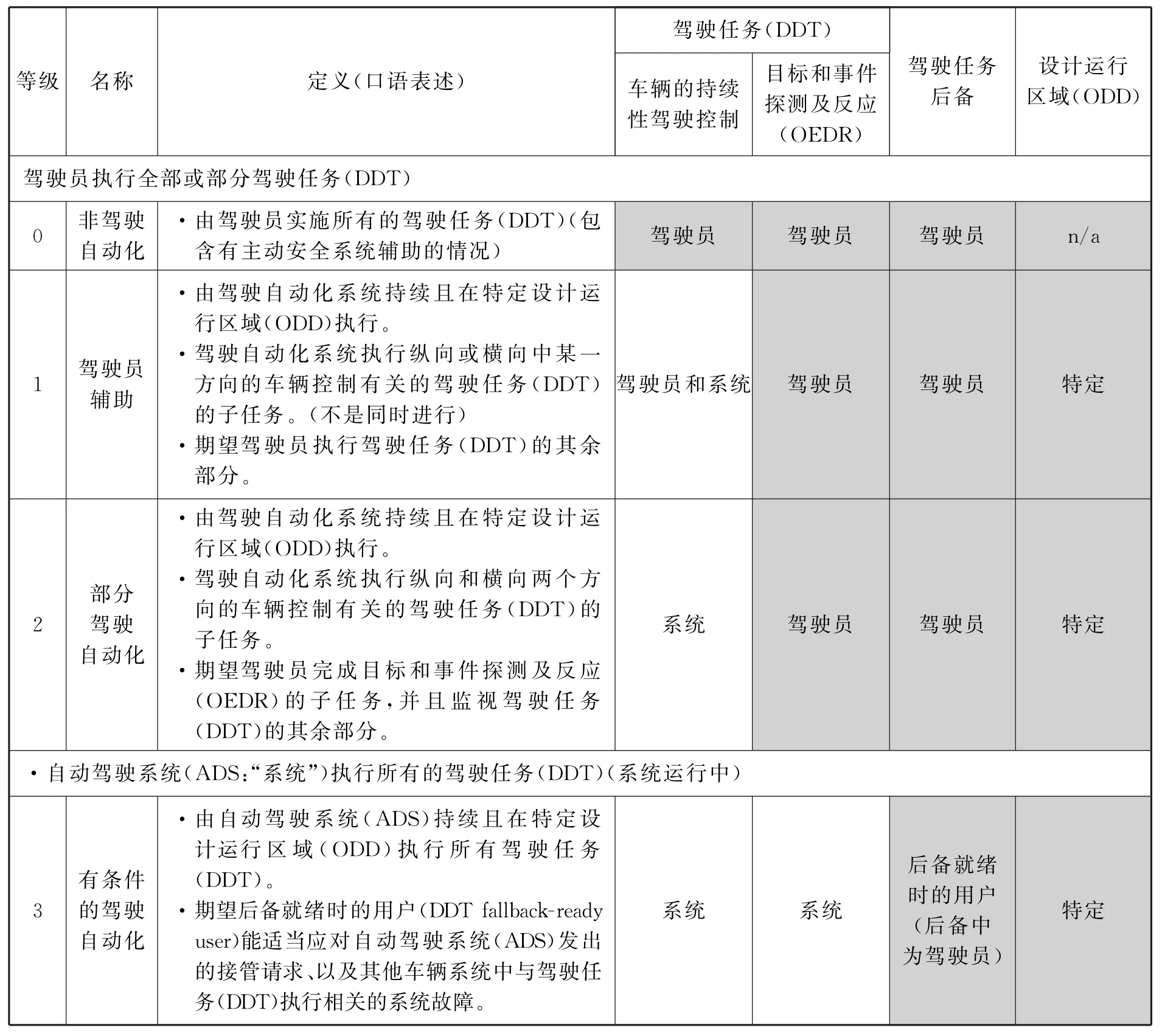
SAEJ3016(2016)
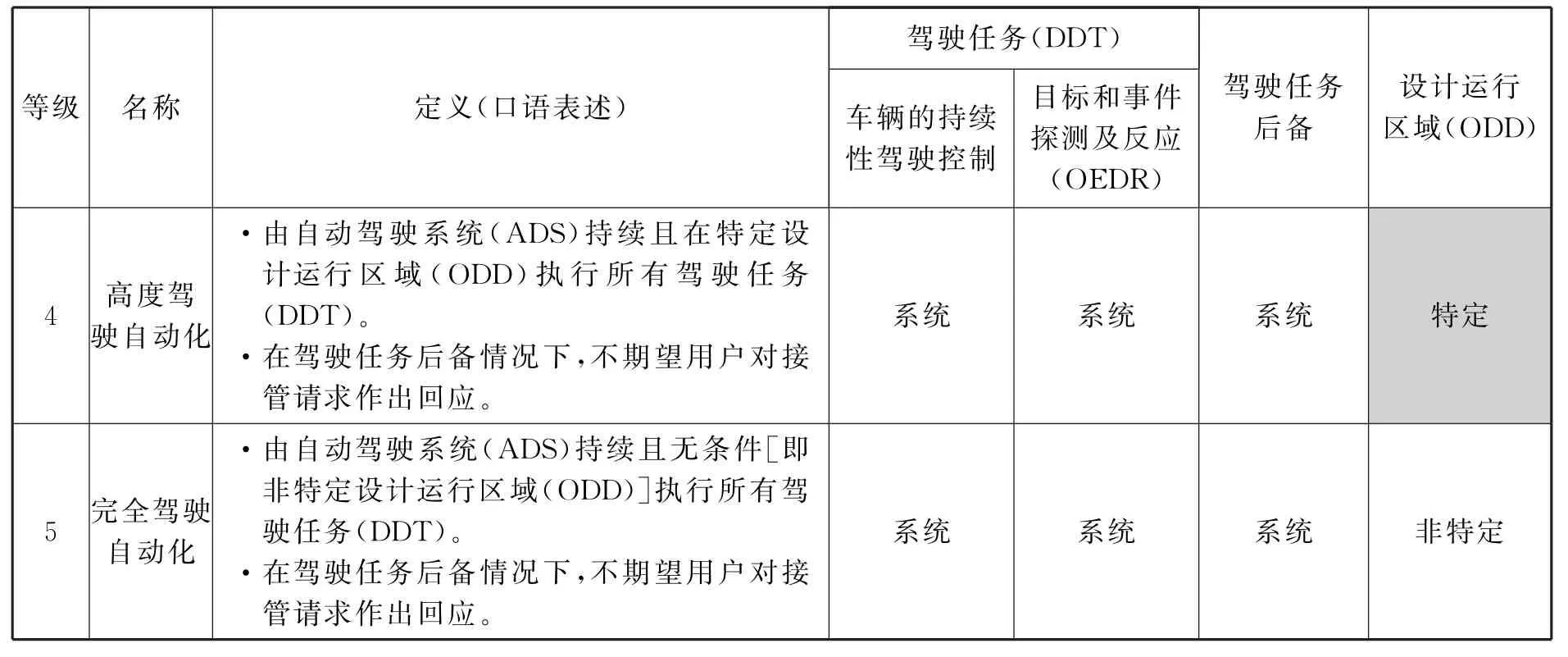
(續表)
自動駕駛汽車的“駕駛”這一概念與交通肇事罪認定的難易程度相關。在等級1—3中,由于存在駕駛員,因此比較容易以交通肇事罪立案追究駕駛員的刑事責任。但在等級4和等級5中已經沒有駕駛員的概念,由此便產生了發生能不能追究“駕駛員”責任的問題。簡單來說,與等級1—3相比,等級4和等級5的用戶的責任將更加有限。
(二)相關人員
需要注意的是在自動駕駛汽車中存在較多的相關人員,一方面包括設計人員、制造者、銷售商這些位于自動駕駛汽車的制造、流通過程中的人員;另一方面還包括駕駛員、使用者這些使用自動駕駛汽車進行移動的人。并且,例如在使用第三人所擁有的自動駕駛汽車時,所有人與駕駛員、使用者并非同一個人,由此可能產生所有人的單獨責任問題。
除此之外,使用智能運輸系統(Intelligent Transport Systems,簡稱ITS)的自動駕駛汽車需要依靠來自外部的信息,于是也有可能產生車與車、車與路、路與路之間的通信系統④參見[日]岸本健吾、山田雅也、神野正之:《使用700MHz頻段的車與車、車與路、路與路之間的通信系統》,載《SEIテクニカルレビュー》第184號(2014年)。相關的通信運營商、系統設計人員的責任,以及空間數據運營商⑤參見[日]小林正啟:《關于空間數據》,載“情報ネットワーク法學會網”,https://in-law.sakura.ne.jp/archive/taikai/2014/bunkakai2-Kobayashi.pdf,最后訪問時間:2018年9月3日。的責任等問題。
在這些相關者中,特別重要的是位于制造、銷售方面的設計人員、制造者、銷售商(以下簡稱“制造者等”)的責任,以及擁有和使用制造、銷售后的自動駕駛汽車的駕駛員、使用者、所有人(以下簡稱“使用者等”)的責任。因此,下文就這兩點進行重點論述。
(三)控制權困境
無論是在德國還是在日本,所謂的“控制權困境”的問題,都被作為重點討論的課題之一。總而言之,這是指應由誰(人抑或是車)來控制自動駕駛汽車的問題。
洛曼(Lohmann)⑥Melinda Florina Lohmann,Automatisierte Fahrzeuge im Lichte des Schweizer Zulassungs-und Haftungsrechts,Nomos,2016,S.197.將此認為是支配義務(Beherrschungsgebot)的問題。Lohmann以SVG第31條作為駕駛員應當負有支配義務的根據,認為在使用高度自動駕駛汽車和全自動駕駛汽車的情形中均應當履行支配義務,但同時認可存在通過提高自動駕駛汽車的安全性從而進行法律修改的余地。⑦“Der Fahrer muss seiner Pflicht zur Beherrschung,u.a.,durch überwachung und übersteuerung,nachkommen.”Lohmann,ibid.,S.207.
對此,希爾根多夫(Hilgendorf)認為該問題并不簡單,并將其作為一種困境,從而提出了“控制權困境”的概念,⑧Eric Hilgendorf,Automatisiertes Fahren und Recht Deutscher Verkehrsgerichtstag(53.,2015,Goslar),Ver?ffentlichung der auf dem 53.Deutschen Verkehrsgerichtstag vom 28.bis30.Januar2015 in Goslar gehaltenen Vortr?ge,Referate und erarbeiteten Empfehlungen,K?ln 2015,S.5572.以及Eric Hilgendorf,Teilautonome Fahrzeuge:Verfassungsrechtliche Vorgabe undrechtspolitische Herausforderungen.即在發生事故時,最終應當判斷的是,是否違反了注意義務。但是,法院是否會認定自動駕駛汽車特別是全自動駕駛汽車的駕駛員(全自動駕駛汽車情形下的“使用者”)負有注意義務,目前仍不明確。例如,即使某輛汽車可以實現“全自動駕駛”,但法院仍有可能認定該車的使用者負有某種注意義務(如確認全自動駕駛功能是否確實妥當地運行、觀察車輛周圍的情況等)。他認為,在實務中,自動駕駛汽車在沒有問題地持續行駛過程中,駕駛員(及使用者)的義務可能會逐漸減輕。在彌補處罰上的間隙的意義上承認這樣的注意義務的確具有一定的正當性。但是,承認自動駕駛汽車的駕駛員及使用者處于這種“控制”的狀態,意味著即使乘坐了自動駕駛汽車,也不能看書、寫文章、玩手機或做其他事情,甚至可能存在由于自動駕駛汽車的故障或老化而機能低下,給人提供移動可能性方面的便利將大幅降低的情況。因此,在這種意義上可以說,分析在全自動駕駛的情況下是否也應當認為駕駛員及使用者在乘車過程中負有某種注意義務(控制義務)的問題(即所謂的“控制權困境”)是非常重要的。Hilgendorf建議通過立法解決,但是如果沒有及時進行相關立法,這將成為解釋論上的問題。
三、使用者等的責任
(一)Lohmann的分析
由于在等級1—3中存在駕駛員,因此在發生事故時,首先會追究駕駛員的責任。Lohmann按照德國BASt的定義進行了如下分析。
第一,在輔助階段履行注意義務是駕駛員的責任,一味地按照導航而不小心撞到了過馬路的行人,則相關責任的承擔主體是駕駛員。而且,警告系統終歸僅是輔助而已,不能僅以警告系統作為免責根據,不可以免除其駕駛時的注意義務。⑨前引⑥,SS.165166.
第二,半自動駕駛汽車的駕駛員始終負有注意義務,當自動駕駛汽車的操控違反法律規定時,駕駛員應被追究違反該義務的責任。⑩前引⑥,S.185.
第三,承認高度自動化但并非全自動駕駛的汽車在緊急情況下的介入義務。[11]前引⑥,S.197.不過,在刑法上,即使承認保障人的地位和因果關系,行為能力(Tatmacht)的有無也是需要討論的問題,即保障人是否具有回避結果的可能性。Lohmann提到,對于高度自動化的汽車即使存在理論上的介入可能性,[12]與半自動駕駛汽車不同,并不追求瞬間進行切換,鑒于其有一定的緩沖時間。Lohmann,前引⑥,S.66.但實際上到底能夠介入到何種程度,仍是個問題。[13]“Zwar sind hochautomatisierte Systeme per Systemdesign übersteuerbar,jedoch ist ihre faktische übersteuerbarkeit aufgrund des Abwendens des Fahrers vom Fahrgeschehen zweifelt.”Lohmann,前引⑥,S.66.這被稱為“處罰可能性的空白”(Strafbarkeitsvakuum)。[14]比如Lohmann,前引⑥,S.208.
(二)中川由賀的意見
中川由賀提到了與系統所承擔的功能變化相對應的刑事責任的變化。[15][日]中川由賀:《自動駕駛導入后的交通事故的法的責任的變化:刑事責任與民事責任狀況的不同》,載《中京lawyer》第25號。在進入討論之前,中川由賀首先將自動駕駛分為三種情形:① 停止系統輔助的情形;② 系統在某路段上承擔全部工作的情形;③ 系統從出發地開始至目的地為止承擔全部行駛任務的情形。中川由賀認為,在①的情形中,判斷的框架體系與沒有系統的情形相同,但駕駛輔助系統的技術安全性極高,且社會上對安全性的此種認識成為普遍共識時,可能會引起擴大信賴原則適用范圍的討論。在②的情形中,在駕駛員駕駛時,則與過去的框架體系相同;在系統進行控制時,則與③相同。在此之上,中川由賀指出,情形②特有的問題在于,在系統發出警告至駕駛員接管為止的時間內,駕駛員的責任將根據駕駛員在警告時點立即接受任務的情形下能否回避結果的發生,即該時點的結果回避可能性的有無(過失的有無)而有所不同。關于③的情況,中川由賀認為,不能要求駕駛員負有注意義務,不能認定其存在過失,因此也不得追究其法律責任。而對于制造者的責任,中川由賀認為在法律適用或事實認定中,能夠對制造者等追究刑事責任的情形應僅限于極特殊的案例。
(三)基于SAE等級的使用者責任
與駕駛員應持續注意周圍情況的等級1和等級2不同,在等級3中,駕駛員通常情況下沒有注意周圍情況的必要,只需要在緊急時刻注意即可。[16]但是,真的“不需要注意”嗎?可以參考等級4中的相關討論以及控制權困境的問題。換句話說,等級1和等級2基本上可以原封不動地適用與等級0(通常的汽車)相同的框架體系,但是在等級3的情況下,駕駛員的責任從恒常注意義務限定為“轉換時”及緊急時刻的注意義務,而駕駛員在警告時點即使立即接受任務也無法回避結果的話,則否定駕駛員的結果回避義務,[17]參見前引[15],中川由賀文;Lohmann,前引⑥,S.197.進而否定其責任。
到了等級4,由于沒有駕駛員的概念,大致可以認為使用者等的責任與等級1—3相比將更加有限。等級4中的使用者等可能應當承擔如下兩種重要責任。
第一種是自動駕駛汽車的維護責任。例如,Hilgendorf曾以傳感器污濁而沒有注意到兒童的情況為例,認為在此種情形下,可能發生有關所有人的日常維護以及駕駛員和使用者在駕駛和使用時確認傳感器等狀況的過失問題。典型情形包括所有人怠于進行維修保養等(作為或不作為)而導致自動駕駛汽車的自動駕駛功能未處于可完全使用的狀態;又或者是使用者怠于履行使用時的確認義務,未確認汽車是否處于可安全使用的狀態而使用。前述兩種典型情形下的歸責,可以說是以所謂的產品等的“誤用”為理由而追究其責任。進行此種形式的歸責,在刑法理論上基本是可行的。[18]關于所有者到底負有何種程度的維護義務,使用者到第幾等級為止負有確認義務,這些都是殘留下來的問題。例如,“就算是進行了應該進行的維護卻依然發生了事故”的話,那么就有可能在結果回避義務的問題上否定使用者等的責任。
第二種是即使技術層面滿足了等級4的要求,但法律層面仍有可能要求使用者承擔對周圍狀況等的注意、觀察義務。這正體現了Hilgendorf所說的控制權困境的問題。[19]但在等級3中也可能發生控制權困境的問題。也就是說,等級3,就算在技術上僅在緊急狀況下需要駕駛員的注意或者觀察,但在法律上依然可能被要求注意或者觀察。又或者,比如為了提高安全性,在能夠認可結果回避可能性的早期階段就發出警告的話,的確能減少處罰的間隙,但是這會導致頻繁警告,駕駛員回歸到駕駛,發生與要求事實上持續注意和觀察相同的結果。對此,有人提出如下觀點:[20]劉藍璟、劉衛華:《自動駕駛模式下交通肇事罪的認定》,載《法制與經濟》2018年第2期。如果在自動駕駛系統操控下發生相同情況,駕駛員實施了相同違章行為,且自動駕駛系統存在自身缺陷或故障,兩者共同作用導致事故發生,在此情況下就不宜一律認定駕駛員負事故主要責任。因為,導致事故發生的駕駛行為是由人類駕駛員與自動駕駛系統共同完成的,駕駛員的作用可能會占較小權重,這就說明其法益侵害程度較小,如果仍認定其負事故主要責任則不合理。但是,讓自動駕駛系統負事故責任又顯荒唐,對此,本文的初步看法是,先將自動駕駛系統與駕駛員看作一個統一主體,將其行為與其他主體的行為進行比較,確定各自的事故責任大小,然后再劃分自動駕駛系統與駕駛員對事故發生所發揮的作用大小,據此確定駕駛員對整個事故應負的責任大小。
四、制造者等的責任
(一)一般論
對于制造者等會產生產品責任(是否構成刑法上的業務過失致死傷罪)的問題。雖然在民事范圍內比較容易認可制造者等的產品責任,但在判斷其刑事責任時則應在一定程度上予以限定。[21][日]北川佳世子:《關于制造物責任的刑法上的問題點》,載《早稻田法學》第71卷2號。
關于刑事產品責任,一般分為制造、銷售階段和產品流通后兩個階段進行論述。[22]例如,[日]稻垣悠一:《有關缺陷制品的刑事過失責任與不作為犯論》,專修大學出版局2014年版,第205頁。但作為中間形態,有“藥害艾滋綠十字渠道”,參見大阪高裁判決2002年8月21日判時第1804號第146頁,以及東京地裁2005年9月30日判時第1921號第154頁。
首先,因制造、銷售階段的過失而引發問題的案件包括仙臺高判昭和五十二年(1977年)2月10日判例時報846號第43頁;[23]作為食品制造業者負有職務上的防范鼠患以及防止因制造和販賣被以老鼠的糞尿為介質傳播的病原微生物污染的炸胡蘿卜魚肉餅而造成中毒事故的注意義務,但由于懈怠,被告人的工廠制造了附著沙門氏菌的炸胡蘿卜魚肉餅,并引起了食物中毒,因而被判有罪的事件。最決昭和五十五年(1980年)4月18日刑集34卷3號第149頁;[24]京都府的具有河豚處理資格的廚師提供的虎河豚的肝料理引起了客人的河豚中毒癥狀,從而被認定為具有預見可能性的事件。最決昭和五十四年(1979年)11月19日刑集33卷7號第728頁;[25]用在木質長椅下放置電熱爐的方式來開發和制作組合式桑拿浴池的從業者,由于沒有檢查和確保其構造上的耐火性,導致在使用了上述桑拿浴池的澡堂內,上述木質長椅因長時間受到電熱爐加熱而逐漸碳化最終發生火災,從而被認定為業務上失火罪的事件。最判昭和四十四年(1969年)2月27日判例TIMES232號第168頁;[26]對于將粗制第二磷酸鈉混入牛奶中制造出來的奶粉引起了死傷的結果負有過失責任的事例。以及福岡高判昭和五十七年(1982年)1月25日判TA469號第134頁[27]在米糠油提純工序的一環脫臭工序中,從腐蝕貫穿孔中泄漏出PCB導致多名經口腔攝入的人員罹患有機氯氣中毒的事件。等。這些案件的意義在于以下方面:①提出了向引發產品事故的原因方追究過失責任的問題;②按照員工等對企業規模及制造過程的參與形態的復雜性,采用了組織關系的觀察方法;③以現實具體地參與制造、銷售過程的實際情況,或以管理和監督權限為連接點,提出了違反產品安全方面的注意義務的問題。[28]前引[22],稻垣悠一書,第207頁。
其次,關于產品流通后的過失而引發問題的案件包括最決平成二十四年(2012年)2月8日刑集66卷4號第200頁;[29]認識到了輪轂強度不足卻沒有實施召回的兩名汽車制造公司的品質保證責任人被認定為業務上過失致死傷罪的罪責的事件。最決平成二十年(2008年)3月3日刑集62卷4號第567頁;[30]身為厚生勞動省藥物局生物制劑課課長的被告人在面對血液制劑召回時沒有行使監督權,被認定為業務上過失致死罪的事件。東京地判平成二十二年(2010年)5月1日判TA1328號第241頁[31]明知由于瓦斯熱水器的不當改造引起了死傷事故,卻沒有采取檢修召回措施,被認定為成立業務上過失致死傷罪的事件。等。這一情形中的問題在于,為什么以及在何種情況下會產生召回等義務?[32]例如,[日]岡部雅人:《刑事制造物責任中的召回義務的發生根據》,載《刑事法ジャーナル》第37號(2013年)。在參考德國法的基礎上,日本學界對這一問題展開了激烈的討論。[33]詳細情況參考[日]巖間康夫:《制造物責任與不作為犯論》,成文堂2010年版,第10頁;[日]巖間康夫:《刑事制造物責任的諸論點》,載《刑事法ジャーナル》第37號(2013年)。于是,在特別考慮到產品流通后的過失問題的情況下,以事故原因已經被特定為前提,日本最高裁判所指出,在相關風險因素在何種程度具有認識可能性成為問題時,在此基礎上,為了讓怠于召回這一不作為承擔責任,因為被告人是具有保障人地位的人是必要的,因此需討論是否存在具有相關地位的特殊事由,具體包括危險的重大性、信息的不對等性、權限的優先性等的有無。[34][日]古川伸彥:《關于相對而言最近的刑事審判中的制造物責任與過失的認定》,載《刑事法ジャーナル》第37號(2013年)。
在自動駕駛汽車的情況下,作為制造、銷售階段的責任,有可能成立以程序錯誤、制造時的錯誤、錯誤零部件的組裝、自動駕駛汽車的過早上市、不安全及缺陷產品的銷售、不進行試驗或品質控制、疏忽指示警告義務等為原因的責任問題。[35]參見Lohmann,前引⑥,S.197.例如,渡部提到的“自動駕駛”一詞給駕駛員帶來的錯誤印象,是否可以作為一種指示警告問題呢?與之相對,在產品流通后,則有可能產生召回及修理、不警告等責任問題。
自動駕駛汽車總是存在抽象風險,而解釋清楚事故原因向來是個難題,[36]參考[日]富川雅滿:《Robot und Recht系列論文介紹(1)—2:EricHilgendorf“法與自律型機械:問題概述”》,載《千葉大學法學論集》第31卷第2號(2016年)。即使解釋清楚了,可以說能夠明確地意識到該風險因素的情形也不多。因此,在這種意義上,認可責任的情況也不多。但是,高川雅滿提到的“如果遇到這樣的情況,就要使其作出這樣的動作”,似乎是肯定了軟件編程階段的預見可能性,在自動駕駛中安裝了應對所有情形的軟件的情況下,由于結果會給人的生命、身體造成損害的情形也被考慮在內了,因此很有可能將肯定該情形的預見可能性。[37]相反,如果是不能應對有可能發生的事件的程序,那么這個程序本身可能就有問題。此外,一旦發生事故后,在此之前抽象的、難以具體說明的風險就會變得具體化,要求采取一定應對義務的情形或許也會因此增加,但是在這種情形下必須采取怎樣的措施則未必明確。例如,駕駛員在駕駛自動駕駛汽車途中由于心臟停搏而陷入昏睡狀態的情況下,駕駛員的腳通常會離開加速踏板,汽車也會因此減速,并在道路拐彎的地方偏離道路從而停車,但是如果該車同時使用了車道居中功能和ACC,那么該車將高速地通過道路,最終可能導致駕駛員受傷。[38]這個事例受到了Eric Hilgendorf教授的啟發。這都是自動駕駛汽車得到廣泛使用后有可能發生的現象。如果是首次發生的事故,那么可以否定其預見可能性,但在第二次之后,認為其存在預見可能性是無可厚非的。因此這里的問題在于,雖然在首次事故后需要采取一些對應措施,但是難以判斷應當采取何種措施(是應當要求停止銷售、增加對駕駛員身心監視功能,還是僅警告就可以呢)。[39]由于軟件的瑕疵,僅是產生了不會導致問題卻可以被認識到的很小的危險并不會發生召回義務,且在與通常不同的投入領域中有一次很小的危險變得明確了也不會產生召回義務。
Lohmann指出,全自動駕駛的汽車基本不存在介入義務的余地。[40]但在Lohmann,前引⑥,S.203中提到,可以設想面向高速公路的自動駕駛功能,在進入停車場時需要進行切換的情形。于是,使用者是否進行了介入與安全行駛之間不存在關系;使用者沒有必要注視系統運作情況,可以同時做其他事情。[41]Lohmann,前引⑥,S.204.因此,全自動駕駛的汽車與高度自動駕駛汽車的情況一樣,甚至是比其更容易否定使用者的行為能力。[42]Lohmann,前引⑥,S.205.于是,隨著自動駕駛等級的提升,駕駛員和使用者的責任范圍將不斷縮小,但在實務上,刑事產品責任法則有可能具有重要意義。[43]Lohmann,前引⑥,S.209.
(二)電車難題
對于應當如何思考電車難題乃至生命法益陷于兩難狀況的問題,日本和德國向來有爭議。
在德國,這被稱之為“轉轍員事件”:[44]Hans Welzel,Zum Notstandsproblem,ZSt W 63(1951)S.51.在鐵道上有輛失控的電車疾馳而來,再這樣下去的話在鐵道上的五個人將來不及逃離而被撞死。看到這一情況的轉轍員甲為了救這五個人的性命而改變了電車的軌道,但也因此導致在該鐵道上的乙被電車碾壓而亡。甲認為,乙的死亡是不得已而為之的。也就是說,在鐵道上的五個人抑或者是乙的死亡無法避免的情況下,甲為了救五個人而犧牲了一個人的生命。對于甲的這一行為,應當作為殺人罪進行處罰呢,還是說可能成立緊急避險呢?在德國的所謂DV反擊殺人案件中,DV受害人為了救自己和女兒們的生命而侵害DV加害人生命的行為不構成合法化的緊急避險(德國刑法第34條)。[45]BGHSt48,244.而這里的問題在于,是否構成免責的緊急避險。免責的緊急避險雖然在生命之間對立的情況下也能成立,但是在轉轍員事件中,轉轍員是為了救第三者的生命而侵害第三者的生命,而德國刑法第35條第1款僅承認“為避免自己或自己之近親或其他密切關系者所遭遇之該等危險”的行為構成免責的緊急避險,因此該案件也不構成免責的緊急避險。其原因在于,德國不允許進行生命之間的比較衡量。
對此,Engl?nder提出了超法規的免責的緊急避險,主張只要滿足損害最小化即可。[46]Armin Engl?nder,Das selbstfahrende Kraftzeug und die Bew?ltigung dilemmatscher Situationen,ZIS9/2016,S.610.根據該觀點,為了救五個人的生命而犧牲一個人的生命的情形,通過適用超法規的免責的緊急避險,甲可以不承擔殺人罪的罪責。
在日本,生命之間的比較衡量基本上是不被允許的,但有力說也認可生命之間的比較衡量。[47][日]西田典之:《刑法總論》,弘文堂2010年版,第143頁。這樣看來,在轉轍員事件中,為了救五個人的生命而犧牲一個人的生命,是可以成立日本法上的緊急避險的。[48][日]深町晉也:《機器人、AI與刑事責任》,載[日]彌永真生、宍戸常壽編:《機器人、AI與法》,有斐閣2018年版,第226頁。
(三)中國刑法的適用問題
在中國,對車輛生產商能否適用交通肇事罪向來頗有爭議。有學者主張,對于交通肇事責任主體的判定,需要結合實際情況方能作出結論,等級4所規定的全自動駕駛系統出現事故,由于并不存在適格的責任主體,因此并不構成交通肇事罪。[49]陳禹衡:《自動駕駛系統交通肇事的刑事責任分析》,載《淮陰工學院學報》2018年第2期。所以,當自動駕駛車輛生產商需要承擔監督責任時,不應以交通肇事罪定罪量刑,而應以刑法第146條規定的生產不符合安全標準的產品罪定罪處罰。此外,根據刑法第150條的規定,單位當然可以構成生產不符合安全標準的產品罪。[50]程龍:《自動駕駛車輛交通肇事的刑法規制》,載《學術交流》2018年第4期。但是,反對該立場的人指出,《關于審理交通肇事刑事案件具體應用法律若干問題的解釋》第7條規定,單位主管人員、機動車輛所有人或者承包人指使、強令他人違章駕駛造成重大交通事故的,以交通肇事罪定罪處罰。由此可知,除駕駛員之外,這些“可以對交通工具安全行駛施加影響的人”也可以成為交通肇事罪的主體。若承認自動駕駛系統的駕駛員地位,從某種意義上說能對自動駕駛系統施加影響或控制的人是自動駕駛汽車的制造者、平臺運營商。[51]黃波:《自動駕駛汽車交通肇事的刑法應對》,載《天府新論》2018年第4期。
五、自律性與不可預測性
(一)自律性問題
1.問題所在
除前述自動駕駛汽車有關問題之外,與機器人法整體相關的還有自動駕駛汽車的自律性和突發性這一特征。機器人可以通過其內部狀態的變化來改善一系列指示,而且可以沒有外部刺激地改變這些特征。因此,它們可以在沒有任何人類的直接干涉通過其自身行動來施加控制,從而成功的處理它們的任務。[52]“Robots can improve the set of instructions through which their inner states change,and transform such properties without external stimuli:therefore,they can deal successfully with their tasks by exerting control over their own actions without any direct intervention by humans.”Ugo Pagallo,Law of Robots,2013,P.3.即使購買同種類型的自動駕駛汽車,通過其自身與周圍環境中生長的生物的相互作用而取得的知識或技能,也能在很短的時間內作出差異很大的動作。[53]“Consider the same model of AI vehicle we are planning to buy next Christmas:By gaining knowledge or skills from their own interactions with the living beings inhabiting the surrounding environment,the same model of AI chauffeur will behave quite differently after only a few days or weeks.”Ugo Pagallo,ibid.,P.72.于是,自動學習的結果可能會產生諸如對某種狀況作出的最合適的判斷卻不適用于其他情況的問題,具體可參考下述案例。
設計人員將自動駕駛汽車設計為具備自動學習功能,為了可以作出最妥當的應對而根據行駛經驗自動學習,制造者制造了根據這樣設計的自動駕駛汽車。使用者在1年內一直讓該自動駕駛汽車只在行駛車輛非常多的道路上行駛。在這樣的情況下,如果從左邊突然沖出來人的話,采取緊急剎車容易將事故的損失最小化。此后,使用者讓該自動駕駛汽車在周圍沒有任何人的道路上行駛,當被害人從左邊突然沖出時,該自動駕駛汽車根據自動學習功能的自律判斷,采取了緊急剎車,結果撞到了被害人,使被害人受傷;如果立即向右打方向盤的話,那么被害人就可以得救。這種情況下的問題提出了疑難案件(hardcase)問題,是比上述問題更加難的問題。但下述程度的內容還是可以探討的。
富川雅滿提出了雖短但頗有意思的問題,對于因故意引起不法結果的可以追究刑事責任,而問題是由于過失給物和人造成損失的情形,當如何處理?因錯誤操作導致損害發生時,本來就難以判斷是硬件制造的問題,還是編程的問題;是使用者的不當使用,還是自律型機械的自我學習,抑或是各種要素綜合作用的結果,從而難以證明因果關系。此外,對于寄以通過消除人工錯誤從而減少事故期待的自動駕駛系統的事故,使用者沒有預見可能性,或僅有非常低的畏懼感(危機感)。因此,過失犯成立的范圍會非常有限。而關于制造者,他認為(例如,在兩側有人的情況下,為了避免正面沖突,而程序向左或向右的某一側打方向盤的情形下)存在認可預見可能性的可能性,這種情況下也可以考慮緊急避險或被允許的危險法理,在自動駕駛系統的導入被積極評價的現狀下,建議展開運用該法理的理論。[54]前引[36],富川雅滿文。
2.因果關系的問題
首先,自律性和突發性讓因果關系的證明變難,即關于機械學習的結果所作出的“判斷”,存在很難明確說明其為什么作出該判斷的情形,即使可以考慮是程序的錯誤、發生事故時輸入信息的錯誤、在某個階段學習了錯誤的信息等各種各樣的原因,但很難找出其最終原因。如上文所述,由于存在各種相關人員,因此很有可能不能明確是哪一方相關人員的過失導致了事故。雖然沒有自律性和突發性也有可能存在這個問題,但可以說由于存在自律性和突發性,進一步加大了事后查明的困難性。
在這種情況下,不能否認可能會作出由于不能認定因果關系而不能認定任何人的責任的判斷。但是,如果總是出現這樣的結論,有可能成為上述意義上的過小責任。
因此,這里需要其他理論,比如使用過失共同正犯理論的觀點,[55]參見日本最高裁判決1953年1月23日刑集第7卷1號第30頁。認為是多個相關人員的共同過失導致了事故發生,克服了由于這種因果關系的證明困難所導致的過小責任問題。但這當然必須是刑法解釋論可以允許的范圍內的內容,不能為了追求結論的正當性而超出了刑法解釋論的范圍。
根據最高人民法院《關于審理交通肇事刑事案件具體應用法律若干問題的解釋》(2000年11月10日),即使行為人實施了違反交通運輸管理法規的行為,并因此發生了重大交通事故,也不是就一概以交通肇事罪論處,還要看行為人所負責任的大小,例如是主要責任還是全部責任,在上述1級、2級、3級駕駛狀態下,駕駛員可以對交通工具進行一定的控制,在技術上不能查明事故發生的主要原因時,難以分清駕駛員是否應對交通事故負主要責任。
3.預見可能性的問題
自律性和突發性對預見可能性也有很大的作用,即越是要求具體的預見可能性,就越容易以自動駕駛汽車的自律性和突發性[即機械(中安裝的人工智能)作出的判斷]為由來否定預見可能性;相反,如果只是抽象理解預見可能性的話,則又會容易肯定預見可能性,自動駕駛汽車相關人員的責任也因此會加重。在上述機械學習導致的事故案例中,對制造者等而言,機械通過學習功能自動學習,結果作出了與當初相差很大的行為時,可以認為這樣的事故是抽象的。但這樣的事故是稀少案例,如果這些事故沒有具體地、真實地發生,是很難進行預測的。因此,僅有“或許由于自律性和突發性而作出與當初相差很大的行為”這種程度的認識,就肯定制造者等抽象的預見可能性,進而有可能讓制造者等對事實上發生的事故承擔結果責任。以這個層面上來說,這是一個非常難的問題。
如上文所述,關于這一點或許可以適用被允許的危險的法理,即由于自律性和突發性(這種情況下,特別是自動學習)使得行駛最適化,如果該社會優點足夠大的話,其導致的在例外情況下的危險作為被允許的危險而被允許。當然,僅因存在自律性和突發性就誰都可以不負責任的話,那么就可能發生社會安全性(交通事故的預防)問題,在一定條件下應該讓誰(可以認為如果使用者沒有錯誤使用的話,那么自然就是設計人員或制造者)來承擔責任。但如果可以很容易地滿足該要件的話,則可以進行自主學習判斷的自動駕駛汽車的開發和銷售會消失,對新技術產生萎縮效果。因此,應考慮自律性和突發性給社會帶來的優點的程度等因素,對于某種危險是否是值得被稱為“被允許的風險”,應進行連接學界與業界、實務界與理論界的研究。而且,具有自律性和突發性的自動駕駛汽車可以進一步減少事故等,提高了社會便利性,因此應促進具有自律性和突發性的自動駕駛汽車,則應探討上述的安全港的立法。
4.預防指示與讓駕駛員預防事故的措施
此外,一部分學者將此作為預防指示的問題,認為制造者等應向使用者等警示自動學習可能產生各種各種的危險。[56]Jan-Philipp Günther,Roboter und Rechtliche Verantwortung:Eine Untersuchung der Benutzer-und Herstellerhaftung,Herbert UtzVerlag,München2016,S.224.但是,作出了警示,仍存在使用者等,特別是等級4的使用者等能做什么的問題。這意味著,僅抽象地指出“會存在由于自動學習導致的發生不能預測的行為”的情況,很難因此就認為可以完全免除制造者承擔自律性和突發性所致結果之責任。并且,只要問題的本質仍然是因自律性和突發性所導致的行為產生的“不能預測性”,就不可能具體地指出會發生怎樣的行為。此外的問題是,作為第三方的被害人沒有收到警示,由于第三方被害人的原因,也很難使警示成為免責事由。這意味著作為警示問題來處理未必是妥當的。
深町晉也認為,在控制權困境的語境下,存在這樣的問題:對于等級3以上無須自己操縱駕駛的駕駛員,是否應當期待其負有與自己駕駛汽車相同程度的前方注視義務。因此,深町晉也認為,如果本身就對無須自己駕駛的汽車課以注意義務,則在等級3的自動駕駛汽車的用戶界面之中設計并安裝促使駕駛員對自己駕駛的汽車履行一定的前方注視義務的裝置就非常重要,如果沒有這樣的設計,由于設計并銷售誘發汽車駕駛過失的自動駕駛汽車,汽車廠商的責任人等可能構成過失責任。[57]前引[48],深町晉也文,第215頁。
5.標準
為了免于刑事責任,汽車廠商應當如何采取安全措施是個難題。對此,我們可以從貝克(Beck)所強調的規格及標準所發揮的作用中得到些許啟示,即業界團體以及協會等應當盡可能地制定標準。[58][德]Susanne Beck:《機器人工學與法》,[日]只木誠監譯、富川雅滿譯,載日本《比較法雜志》第50卷2號。
在自動駕駛汽車的駕駛員這一方面,如果存在行業統一的最低技術標準與規范、法律法規的相關規定,那就以此作為重要參考;如果還不存在這樣的標準,那么駕駛員就應履行更為高度的注意義務,而強調盡快出臺我國的自動駕駛安全標準。[59]楊劍鋒:《結果無價值型過失論在汽車自動駕駛時代的展開——以交通肇事罪為切入點》,載《法大研究生》2017年第1期。
(二)控制權困境與過小和過大歸責
1.風險分擔的問題
以上簡單地探討了使用者等、制造者等的過失刑事責任,而在此將控制權困境的問題狹義地作為使用者等的責任問題是不太妥當的,即控制權困境的背景中存在以下問題:對于被認為雖存在新的、不確定的風險但其帶來的便利性也超過了一定程度的技術,技術使用方、技術提供方及潛在被害方三者之間應該分擔何種程度的風險呢?
在上述情況下,如果沒有達到風險分擔最適化,則有可能產生以下問題:若發生過大范圍歸責的情況,則有可能導致提供方不提供具有便利性的技術,使用方不使用具有便利性的技術,具體在自動駕駛汽車的情形下,則有可能優秀的程序人員、技術人員等因擔心責任而不從事自動駕駛汽車的研發,從而阻礙自動駕駛汽車的開發和流通;此外,通過購買使用自動駕駛汽車可以享受便利性的人也可能不購買使用了。特別是,如果期待通過自動駕駛汽車消除人工錯誤從而減少事故的發生的話,即使減少了自動駕駛汽車的事故,但也不會減少以往汽車的事故,這是否是社會最適化,仍有質疑的余地。
但是也不能因此就認為歸責越少越好。也就是說,即使是安全性能多少有些欠缺的自動駕駛汽車,對于向市場投入和使用,如果沒有實際上被追究責任(至少是刑事責任)的風險,那么不能否認會出現安全性能低的自動駕駛汽車導致的事故多發,以及由此導致的法益侵害增大的危險。這對潛在的被害人來說是不正當的結果。正因如此,需要考慮的既不是過大責任也不是過小責任的最適歸責標準的相關風險分擔。
2.為促進自動駕駛汽車的開發和使用
然而,即使存在被允許的危險的法理,但仍有其界限。這終歸只是刑法的“解釋”論,在具體案件中什么范圍內的行為被認為是被允許的危險,最終僅由法院來判斷。
的確,法院也會根據被害人的觀點來考慮最終的、最合適的風險分擔的法律適用,這個層面上的被允許的危險法理的確具有靈活性以及可以得出妥當結論等優點。然而這真的與促進自動駕駛汽車的開發和使用相關嗎?這仍有些許疑問。即如果不到法院這一步,就最終不清楚如果做/不做什么就會被追究責任的話,這也會產生萎縮效果。
因此,如果在政策上作出了應促進自動駕駛汽車的開發和使用的判斷的話,那就可以考慮在立法上規定所謂的安全港等。比如,可以考慮對于取得形式認定符合技術標準的自動駕駛汽車,因該功能正常運轉的結果導致的事故,制造者等不承擔責任,或者取得了等級4的形式認定且符合技術標準的自動駕駛汽車的使用者等不承擔維修保養之外的責任,由此導致的潛在受害者的利害也當然成為問題,但如果要在刑法上支持上述政策的實現的話,最好是有這樣的安全港立法。
3.風險分擔的工具
為了實現這種風險分擔的最適化,刑法解釋論上存在各種各樣的工具。但是,在自動駕駛汽車的情形下,基本上沒有太大用處的工具也很多。例如,預見可能性及結果回避可能性在一定情形下有可能有效發揮作用,但總存在抽象的風險,最終存在不賣、不乘坐的結果回避方法的像自動駕駛汽車這樣的存在風險的新技術,預見到了何種范圍的具體的風險的話,就存在預見可能性,采取了何種范圍的應對才可以排除結果回避可能性,這種判斷并非容易。
與此相對,也有在一定情形下有用,但在其他情形下沒有用的工具。例如,關于由于不遵守道路交通規則的被害人的行為導致信賴被害人遵守道路交通規則而發生事故的自動駕駛汽車的相關人員(制造者等和使用者等)的責任的限定,有可能可以使用信賴原則,[60]例如日本最高裁判決1966年12月20日刑集第20卷10號第1212頁中的事例,就算是自動駕駛汽車也會被作出同樣的判斷。但這不特定于“自動駕駛”汽車。又如,被害人是使用者等的,在知道是存在風險的自動駕駛汽車的基礎上購買、使用等的,有可能可以使用危險的承受理論,但在被害人是第三人的情形下則又很難探討適用。[61]Günther,前引[56],S.224.
(三)適用信賴原則的可能性
今井猛嘉提出了對自動駕駛技術的信賴原則的適用可能性,[62][日]今井猛嘉:《圍繞自動化駕駛的法的諸問題(特集 自動駕駛)》,載《IATSSreview》第40卷第2號。而信賴原則被認為,僅在可以信任被害人或第三人的適當行為時方可成立。[63]例如參考[日]西原春夫:《交通事故與信賴的原則》,成文堂1969年版,第14頁。因此,不能輕易認可對“機械的適當行為”[64]關于機械到底能不能實行行為,參考前述Hilgendorf與Joerden等人之間的爭論。的信賴,在一般現行法律解釋的范圍內,應依舊如中川由賀所指出的那樣“不能以信賴系統為由來免除駕駛員刑事上的責任”。但在將來,如果社會達成一致認為可以信賴機械進行妥當行為的話,也有可能將信賴原則擴大到對機械的信賴。[65]參見前引[15],中川由賀文。深町晉也也說到,在信賴自動駕駛系統的妥當運轉,但是其卻沒有妥當運轉的情況下,如果能夠信賴汽車廠商設計并制造了妥當運轉的AI時,根據信賴原則,行為人不承擔責任。[66]前引[48],深町晉也文,第215頁。
(四)被允許的危險
被認為有用性較高的是被允許的危險的法理。[67]參見前引[58],Beck文,第95頁;Günther,前引[56],S.228;Hilgendorf,前引⑧等。
Hilgendorf以“使用了自動停車系統,但因傳感器污濁沒有注意到兒童而撞到兒童”的情形為例,認為不管是何種責任,在自動駕駛汽車的情形下的注意義務的討論與其他領域并無不同,法益侵害可能性和回避可能性奠定了注意義務的基礎,通過被允許的危險(在道路交通中非常重要)和信賴原則進行限制。此外,因系統被黑而引起事故時,可以追究將安全性能低的系統搭載在車輛上的責任。于是,他認為在對這些新問題的回答中,被允許的危險的概念具有重要的作用。[68]Eric Hilgendorf,Automatisiertes Fahrenund Recht Deutscher Verkehrsgerichtstag(53.,2015,Goslar),Ver?ffentlichung der auf dem53.Deutschen Verkehrsgerichtstag vom 28.bis30.Januar2015in Goslar gehaltenen Vortr?ge,Referate und erarbeiteten Empfehlungen,K?ln 2015,SS.55-72;Eric Hilgendorf,Teilautonome Fahrzeuge:Verfassungsrechtliche Vorgabe und rechtspolitische Herausforderungen.還可以參考Eric Hilgendorf,Automatisiertes Fahren und das Recht Zeitschrift für Verkehrsrecht(ZVR),Sonderheft,Dezember 2015,SS.469-472.
Beck認為有必要通過社會相當性或被允許的危險進行限定,如果事先沒有明確已進行了充分的限定,存在機器人的開發、利用發生萎縮的風險。[69]前引[58],Beck文,第95頁。
根據自動駕駛汽車給社會便利性帶來的增大程度,判斷在何種范圍內是被允許的風險。例如,上文的因心臟病導致的事故案例中,自動駕駛汽車的技術以及安全性達到了“或許在例外的情況下給人帶來傷害,在極端的情況下剝奪生命,但減少了人工錯誤,救了數千或數萬人的性命”的程度的話,例如,即使發生了1次事故(雖然或許會被認為此后應進行警告的程度),按照被允許的危險,有可能可以判斷這樣的風險不需要做到召回等。
(五)減少因過小歸責導致的對潛在被害人的不利的方法——數碼人(Digital Person)
如上所述,特別是由于自律性和突發性帶來的因果關系證明的困難性等,持有自律性和突發性的自動駕駛汽車,從結果上說發生過小歸責這一潛在危險較高。如上文所述,這會導致給潛在被害人帶來不利后果。
作為這種狀況的解決方案,提出了數碼人的概念。如上文所述,盡管已存在是否可以讓或者應該讓自動駕駛汽車及機器人承擔責任的討論,但還有一種值得探討的觀點,就是在一定程度上限定使用者等和制造者等的責任,同時通過懲罰數碼人從而減少誰都無法被處罰的情況。然而朝著這個方向探討的話,需要考慮如何對應伊藤指出的如下觀點:通過對機器人的制裁來承認這些自然人負有過失或者負有無法舉證因果關系的法律責任。
但是有幾個批判,其中核心論點來自機器人刑法所主張的自由意志。引用增田豐的觀點指出,至少在目前,我們人類和機器人之間的主觀交流和探討的基礎尚不存在。[70][日]增田豐:《基于規范論的責任刑法的重構——認識論的自由意志論與批判的責任論的項目》,勁草書房2009年版,第477 478頁。因此,在自然人狀態下,承認將自由意志予以擬制,這一理論原封不動地導入機器人領域,尚不可行。[71]參見儲陳城:《人工智能時代刑法歸責的走向——以過失的歸責間隙為中心的討論》,載《東方法學》2018年第3期。關于中國機器人刑事主體問題,參見馬治國、田小楚:《論人工智能體刑法適用之可能性》,載《華中科技大學學報》(社會科學版)2018年第2期。至少從目前的狀況來看,將自動駕駛汽車作為刑事責任的主體是非常困難的。[72]參見江溯:《自動駕駛汽車對法律的挑戰》,載《中國法律評論》2018年第2期。在中國,也有學者提倡考慮在刑法中專門增設“重大人工智能事故罪”,以規范無人駕駛汽車的研發制造環節。[73]參見蔡婷婷:《人工智能環境下刑法的完善及適用——以智能機器人和無人駕駛汽車為切入點》,載《犯罪研究》2018年第2期。
六、結 語
本文以自動駕駛汽車這一今后在公路上使用且很有可能成為我們代步工具的機器人技術為例,對到目前為止未有太多研究的刑事責任進行了初步探討。自動駕駛汽車的刑法相關問題與機器人的刑法相關問題并非一定一致,但一定是自動駕駛汽車的問題相對來說更加特定且具體。本文通過探討自動駕駛汽車的刑法以及機器人的刑法中被允許的危險的概念的重要性以及對自律性和突發性的影響,從而引起相關討論,旨在拋磚引玉。若以本文為契機,機器人法特別是刑法領域的研究變得更加豐富的話,作者將深感榮幸。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車電器(2018年1期)2018-06-05 01:22:54
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
軍事歷史(1985年2期)1985-01-18 07:39:33