齒條傳動系統的速度及定位控制設計
2019-02-21 08:04:56張晶亮
煤礦機電 2019年1期
張晶亮
(中國煤炭科工集團 上海有限公司, 上海 200030)
0 引言
齒輪齒條傳動是最常見的機械傳動方式,是實現旋轉運動和直線運動相互轉換的傳動方案,它具有運行噪聲低、傳動平穩、維修簡單的優點[1]。同時,隨著驅動技術的發展,伺服驅動及其控制系統在各行各業、各種形式的設備中應用會越來越廣泛。兩者的有效結合,可組成各式各樣的機械伺服驅動系統。本文主要介紹三菱MR-JR4伺服控制系統,并根據工藝要求,設計了速度和位置雙重控制方案。
1 系統總體設計
1.1 系統簡介
如圖1所示,設備主體運動部件為沿軌道做往返運動的移動艙,其具有質量大、往返行程固定、電動機驅動扭矩大、速度緩慢等特點。但在安全方面,若其過行程,則會產生傾覆的危險,故除了需要在機械方面設置過行程保護裝置外,在電氣方面亦需設置限位保護功能。
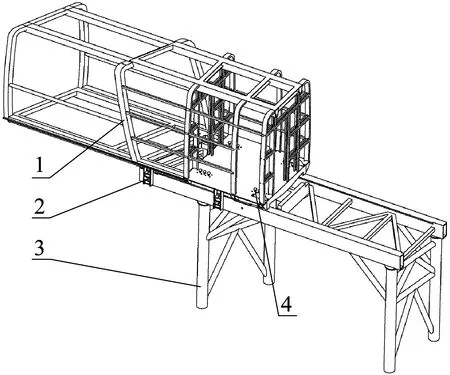
1-移動座艙骨架;2-側輪組;3-主立架子軌道框架;4-制動裝置
1.2 驅動系統構成
設備驅動系統主要由伺服電動機、減速器、齒輪、齒條組成,如圖2所示。
1.3 控制方式設計思路
伺服系統有速度控制、力矩控制、位置控制3種控制方式[2]。在精密直線、環行行走設備中,由于齒條與驅動齒輪的精密配合,加上伺服控制系統的優越性能,通過脈沖控制能進行準確的定位和速度控制。但在大扭矩齒條直線行走傳動系統中,齒條和驅動齒輪的齒牙尺寸較大,其配合誤差相對也較大,通過單一的脈沖控制來進行準確的定位和速度控制存在一定的誤差和難度。從安全工藝要求方面考慮,需要設置多重的限位保護來降低風險,提高設備的安全性能。因此,提出以下設計思路:
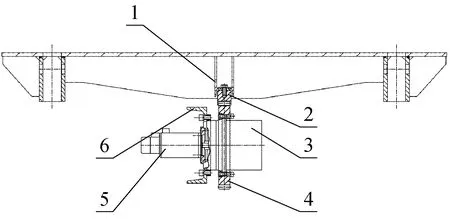
1-移動座艙柜架;2-齒條;3-減速器;4-齒輪;5-伺服電動機;6-主立架框架
1) 利用伺服控制系統脈沖控制實現內部速度控制和位置控制。
2) 在可編程控制器(PLC)端設置外部到位行程開關,形成對內部位置控制的補充。
3) 利用伺服控制系統的正反轉形成末端控制功能,提供第一道限位保護功能。
4) 在PLC端設置極限保護行程開關,實現設備斷電保護的限位保護功能。
通過以上外部限位開關、內部位置及速度控制結合的方式,實現精確定位、速度控制、安全保護功能。系統控制框圖如圖3所示。
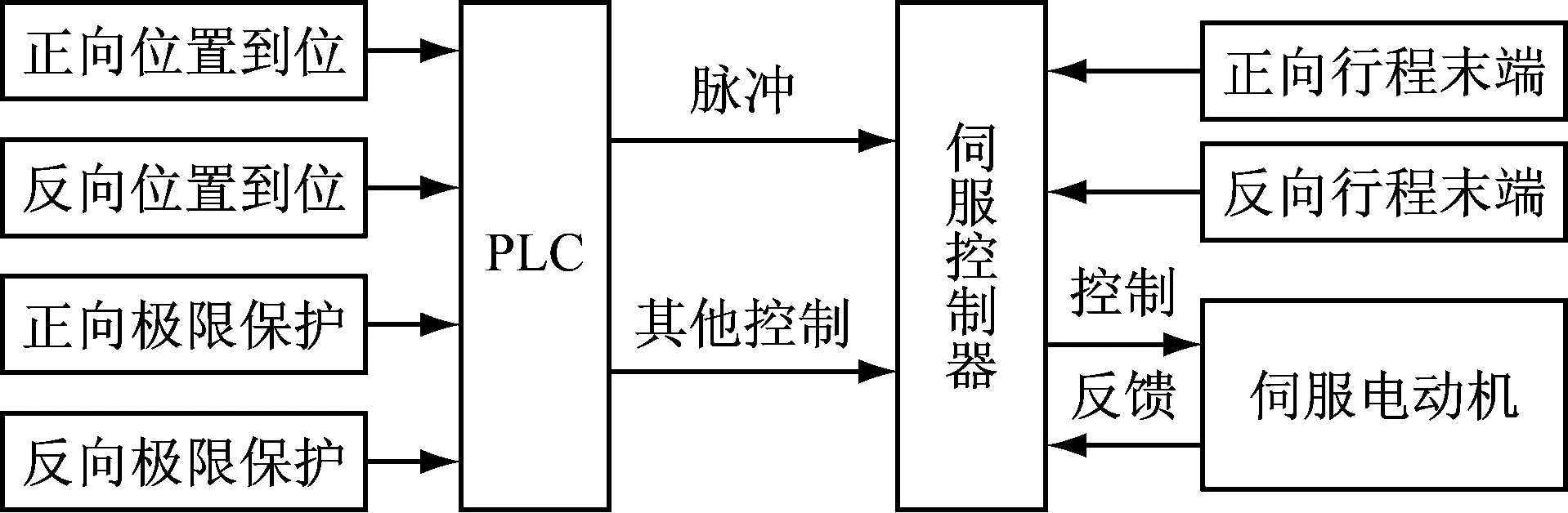
圖3 系統控制框圖
2 控制系統設計與相關計算
2.1 硬件組成
系統硬件主要由三菱可編程控制器(PLC)FX3U、伺服控制器MR-JR4、伺服電動機HG-JR和P+F電感式接近開關NBN12-18GM組成。其中FX3U-20SSC-H定位模塊采用第三代伺服控制網絡總線配合三菱FR-JR4通信,可以輕松構建伺服電動機的絕對位置系統,減少外部接線[3]。
2.2 基本原理
1) 內部速度、位置控制。控制系統中,交流伺服電動機的控制繞組通常是與伺服放大器的輸出端相連接的,控制電信號通過放大器放大后加到控制繞組中,進而控制伺服電動機的轉速和絕對位置[4]。
2) 伺服控制器轉速設定。伺服控制器轉速由PLC編程設定的脈沖輸出頻率f以及伺服控制器參數設置的電子齒輪比CMX/CDV共同確定,進而由伺服控制器輸出信號到伺服電動機控制繞組,控制電動機按設定速度運轉。根據電動機轉速(每秒脈沖數)、機械齒輪尺寸、減速器減速比、行程計算電子齒輪比,計算所需脈沖數,在PLC中編程,并根據PLC數據存儲器范圍確定定位范圍,設定定位數據倍率,實現內部位置控制。
2.3 系統計算
1) 電子齒輪比計算。設備設計線性速度v,齒輪周長c、減速器減速比i。
齒輪每秒轉數
n1=v/C
(1)
電動機每秒轉數
n2=i·n1=i·v/C
(2)
PLC程序設定以其最大輸出頻率f輸出脈沖給伺服控制器,則電動機每轉需要脈沖數(PLS)為
x=f/n2=f·C/ (i·v)
(3)
伺服電動機分辨率為Pt(PLS/REV,每轉額定脈沖數),則伺服控制器設置電子齒輪比為
CMX/CDV=Pt/x=i·v·Pt/(f·C)
(4)
式中:CMX電子齒輪指令脈沖倍率分子,CDV為電子齒輪指令脈沖倍率分母,兩者取最接近的整數。
2) 脈沖數計算。設備行程s,線性速度為v。
單行程運行時間
t=s/v
(5)
單行程需要脈沖數
y=t·f
(6)
實際運行過程中,因大尺寸齒輪和齒條存在配合誤差相對較大,理論計算需要脈沖數與實際需要脈沖數存在一定的誤差。所以,需要在理論計算的基礎上進行多次往返運行,確定行程線性誤差,折算成脈沖數,采集樣本,取其平均值與理論值相加作為最終設定脈沖數。
2.4 其他控制
1) 外部位置控制。當設定固定的脈沖數后,為了預防在往返過程中因累積誤差造成的過行程,設置外部限位開關,一旦脈沖數未全部輸出完畢,而行程開關動作,則由PLC程序將脈沖歸零,停止脈沖輸出,伺服電動機停止轉動。
2) 安全保護。為了防止因伺服電動機不受內部速度、位置控制或外部位置控制等原因引起故障,造成電動機失控,在PLC側和伺服放大器側設計正反轉限位的限位開關,一旦開關動作,即切斷伺服電動機輸出或關斷系統電源。
3 軟件設計
3.1 程序組成
整個控制系統的控制部分由三菱可編程控制器FX3U作為控制核心,設計有多種脈沖輸出指令和定位指令,使定位控制的程序編制十分簡易、方便[5]。本設備利用MRLSOFT軟件編制控制程序,整個控制程序主要由速度設定程序、加減速時間設定程序、JOG運行程序、正轉定位控制程序、反轉定位控制程序、外部位置控制程序、外部極限限位控制程序及其他輔助程序組成。
3.2 程序主要指令介紹
1) MOV U0G7 K4M0:讀取FX3U-20SSC-H端子信息;
2) DMOVP K100 U0G14018,DMOVP K110 U0G14020:設定加減速時間;
3) DMOV D500 U0G500:設定運行速度;
4) DMOV U0G0 D0:設定位置信息;
5) MOV K4M20 U0G518:設置運行操作指令。
4 結論
通過內、外部速度控制和位置控制的有效結合,以及外部雙重限位保護,成功地實現了位置的精確定位,降低了設備傾覆的危險,保證穩定、安全運行。