基于冗余并聯機構的高性能機床設計與分析
2019-02-21 03:47:06趙福群郭盛徐梓淳李典
中南大學學報(自然科學版) 2019年1期
趙福群,郭盛,徐梓淳,李典
(1.北京交通大學 機械與電子控制工程學院,北京,100044;2.北京航空航天大學 機械工程及自動化學院,北京,100191)
由于航空航天器材零部件和大型工件結構尺寸較大,材料硬度較高。在加工生產中,往往要求加工機床具有高性能的要求,即加工時執行機構所具剛度要大,末端調姿能力要強。如在航天器材零部件精密加工中,并聯機構作為機床執行加工任務的末端機構,通過移動單元到達加工位置,由并聯機構對零部件進行局部加工。在并聯機構應用于局部加工時,滿足在局部加工中高剛度性能和在加工位置時動平臺的調姿能力是并聯機構設計和應用需考慮的首要問題。近年來,研究者通過將冗余驅動引入到并聯機構中,對機構性能的提高進行了分析和研究[1-5]。GOSSELIN等[6-7]先后提出了動平臺整周旋轉的平面冗余并聯機構和增大 Gs機構轉角的空間冗余并聯機構,克服了并聯機構轉角能力的不足。XIE等[8]提出了具有冗余驅動的混聯機床,并進行了銑削加工實驗研究和驗證。閆采霞等[9]對驅動冗余和結構冗余 2種機構所具容錯性能進行了研究,顯示了冗余機構自身容錯優勢。白志富等[10-11]通過引入冗余驅動支鏈的方式,研究并證明了此類機構對并聯機床剛度的提升。目前,冗余并聯機構可分為驅動冗余和結構冗余2類[12]。驅動冗余是利用驅動關節替換一些已有系統中被動關節的方法進行設計。驅動冗余可能消除或者減少了機構的奇異位型,但不改變原有并聯機構的工作空間,且這種添加方式增加了產生內應力的可能。結構冗余是通過增加自身結構以外的驅動單元或運動分支到其中運動支鏈上,在機構中增加結構冗余可以避免運動學奇異性,優化工作空間,提高局部和整體的靈活性等,同時可以避免驅動冗余下產生內應力的情況,結構冗余機構更容易完成一些特殊要求的運動[13-15]。本文作者提出并聯機構是以并聯機構為設計主體,通過在單支鏈中添加冗余驅動分支以得到結構冗余并聯機構。對于冗余運動支鏈單元利用閉環回路方程待定系數方法的方法進行求解。同時,利用雅克比矩陣,通過對比與機構運動學性能,顯示冗余驅動對機構運動學性能的改善效果。以并聯機構應用于機床加工中的圓弧形軌跡為例,對機構進行運動仿真,結果為并聯機構進一步應用于機床的設計和制造提供一種方案。
1 機構描述及自由度計算
1.1 機構結構描述
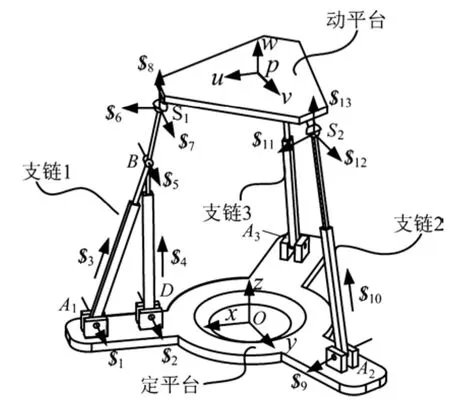
圖1 新型2R(R)/S-2RS并聯機構模型簡圖Fig.1 Schematic description of 2R(R)/S-2RS parallel mechanism
1.2 機構整體與動平臺自由度計算
設機構初始位型為動平臺平行于定平臺,在圖1所示的坐標系下,支鏈 1中各轉動副中心點坐標可記為

支鏈1中轉動副軸線方向與y軸方向平行,由螺旋理論[16-17]可得,則支鏈1中各個運動副的關節運動螺旋可表示為

則支鏈1中運動螺旋系可記為

經計算可得支鏈1末端約束螺旋:

同理可得支鏈2和支鏈3的約束螺旋為:

由式(3)~(5),各支鏈對動平臺分別提供1個約束力,約束力的方向與對應各支鏈中轉動副的軸線平行,且通過對應各支鏈的球副中心點。由于機構初始位置為兩平臺,互相平行,因此,各力線矢為共面關系。由于3個不匯交且共面的力線矢為線性無關,根據螺旋理論,動平臺被約束的運動為平行于x和y軸的移動與繞z軸方向的轉動。由此可得,機構動平臺的自由度為繞x和y軸軸線方向的轉動,平行于z軸的移動。
對于含多支鏈結構的并聯機構,可通過下述修正的G-K公式計算得到其整體自由度:

其中:M為機構整體自由度個數;d為機構階數,d=6-λ;λ為機構公共約束個數;n為機構構件數之和;g為機構運動副數之和;fi為運動副i具有的自由度個數;v為機構減去公共約束數目后的冗余約束個數。
支鏈1中,分別對$1和$3以及$2和$4求反螺旋后,可得到2個反螺旋系中,3組反螺旋相同,支鏈1具有冗余約束的數目為 3,即式(6)中v=3。利用式(6)可得出:

因此,機構整體的自由度等于 4,動平臺獨立自由度數為3,故新型2R(R)/S-2RS機構為結構冗余并聯機構。
2 機構運動學

圖2 新型2RP(R)/S-2RPS并聯機構結構簡圖Fig.2 Schematic diagram of 2RP(R)/S-2RPS parallel mechanism
采用Z-Y-X型歐拉變換對動平臺姿態進行表達[13],給定α,β和γ,則動平臺的姿態可描述矩陣形式記為

設各支鏈球副中心點Si在定坐標系和動坐標系下坐標向量分別為si和sPi,有

式中:p=(x,y,z)T表示p點在固定坐標系下的位置矢量。機構3條支鏈為圓周對稱布置形式,各支鏈分別只能運動在平面內,各球副中心點滿足下述關系:
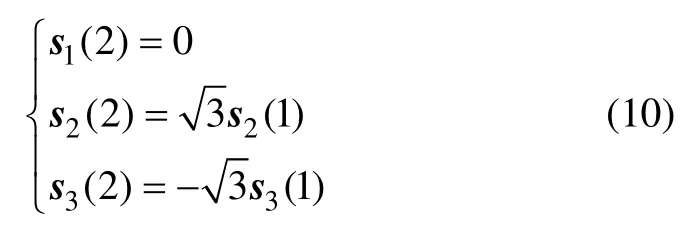
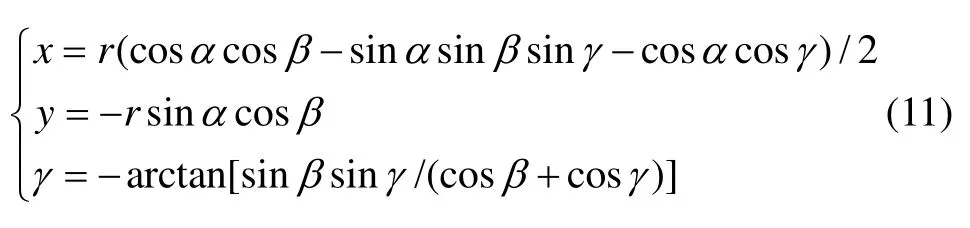
通過式(11),給定參數(z,α,β)T后,動平臺位姿參數(x,y,z,α,β,γ)T便可確定。
2.1 位置逆解
設轉動副中心點Ai,B和D的坐標向量分別為ai,b和d,球副中心點S1坐標向量可表示為s1=[r(cosα?cosβ+sinα)+r/2(cos2α)(cosβ-1),0,-r?cosαsinβ]T。在支鏈1中,已知D點坐標向量為d=[l,0,0]T,A1點坐標向量a1=[l1+l5,0,0]T,那么B點坐標可通過桿長A1B和BD的約束方程求得:
利用BS1桿長約束關系可建立方程為

由式(13)可得出機構各驅動桿長與動平臺位姿的關系式:
式(14)中含有l1和l22個未知驅動值,確定其中一個未知量,進而求出另外一個驅動值。
支鏈2中,A2點坐標向量表示為,球副中心點S2定坐標系中的坐標向量可記為s2。利用A2S2桿長約束關系可建立方程為

在定坐標系下A2點坐標、S2點坐標均為已知,驅動桿長l4可通過式(15)直接求得。同理,支鏈3中驅動桿長l6可通過同樣的方法求得。
鑒于修該課程的學生將來多從事教育事業,大綱中對學生的課堂著裝(尤其是在做口頭報告時)也提出了要求。學生在上課時應避免穿牛仔褲、人字拖、透視裝、低胸裝、帽衫、汗衫及緊身衣等。還提醒學生在做口頭報告和回答他人問題時不可嚼口香糖。
2.2 速度映射及雅可比矩陣
對于結構冗余機構,在給定3個輸出值以后,由于機構存在4個驅動值,支鏈1有無窮多組輸入值配置方式。在求解雅可比矩陣時,需對支鏈1中的其中一個輸入進行給定。同2.1節給定l2為定值,設各驅動值的速度矩陣為,動平臺速度矩陣為,驅動值速度與動平臺速度之間關系可表示為

對式(13)和式(15)以及支鏈3同于支鏈2形式的約束方程分別對時間t進行求導,可得
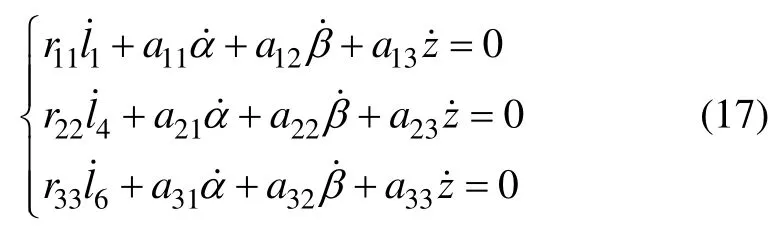
對式(17)中驅動值和動平臺運動參數的方程組進行整理,q和x的系數矩陣A和B可分別表示為
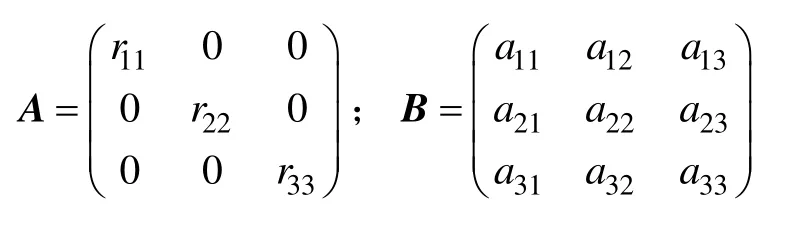
式中:r11,r22,r33和aij分別為關于機構結構參數以及z,α和β的函數;i=1,2,3;j=1,2,3。
對式(16)進行變形:
式中:J為雅可比矩陣。給定機構動平臺的速度參數后,通過式(18)可求得此時驅動值的速度。
3 性能評價
3.1 工作空間分析
工作空間范圍主要是由機構的運動關節轉角范圍和結構參數限制。為了驗證由3-RPS機構[18]通過添加冗余驅動所形成的新型2RP(R)/S-2RPS機構在性能方面得到提升,本節給出兩機構在相同結構參數和約束條件下的可達工作空間范圍。設定l=20,l3=70,l5=10,r=10,單位均為mm。設定3-RPS機構支鏈1中的驅動桿為A1S1,在求解工作空間時,令A1S1為l1,支鏈2和支鏈3與冗余驅動機構相同。給定尺度約束條件為:l1(5,100),l2∈(5,100),l4∈(5,100),l6∈(5,100),單位均為 mm;關節的約束條件為:θ1∈(30,120),θ2∈(30,120),θ3∈(30,120),φ∈(30,150),η∈(30,120),ψ1(60,120),ψ2∈(60,120),ψ3∈(60,120),單位均為(°)。上述桿長和轉角參數表示如圖2所示。圖3所示為兩機構在給定約束條件下工作空間的對比。從圖3可以看出:新型2RP(R)/S-2RPS并聯機構的工作空間在相同約束條件下比3-RPS的工作空間范圍更大。
3.2 靜剛度分析
將在第2.3節所得矩陣J代入式(18),以微分形式進行變形[19]:

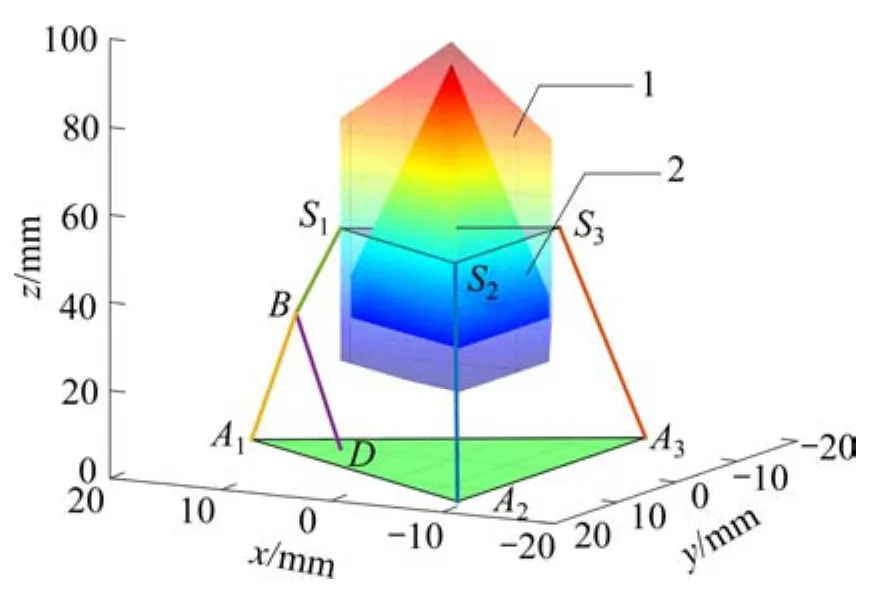
圖3 新型2R(R)/S-2RS并聯機構與3-RS并聯機構工作空間對比Fig.3 Workspace comparison of 2R(R)/S-2RS and 3-RS parallel mechanisms
其中:ΔX表示末端構件所產生的微位移。定義末端構件的力旋量:

可得:

式中:k為等效的彈簧系數,這里取k=1 000 N/mm[20]。
由圖5可知:剛度矩陣的最小特征值在中心點處最大,由中心點向周圍逐漸減小。其中,在z=60 mm相同截面處,新型2R(R)/S-2RS機構剛度矩陣的特征值取值范圍要明顯大于3-RS機構特征值的取值范圍。所以在機構支鏈添加了冗余驅動后,機構靜剛度性能得到了提升,從而提高機構在執行如加工任務的精度。
3.3 靈巧性分析
機構靈巧性通常基于雅可比矩陣計算,而條件數可通過譜范數進行計算[19],定義如下:

式中:
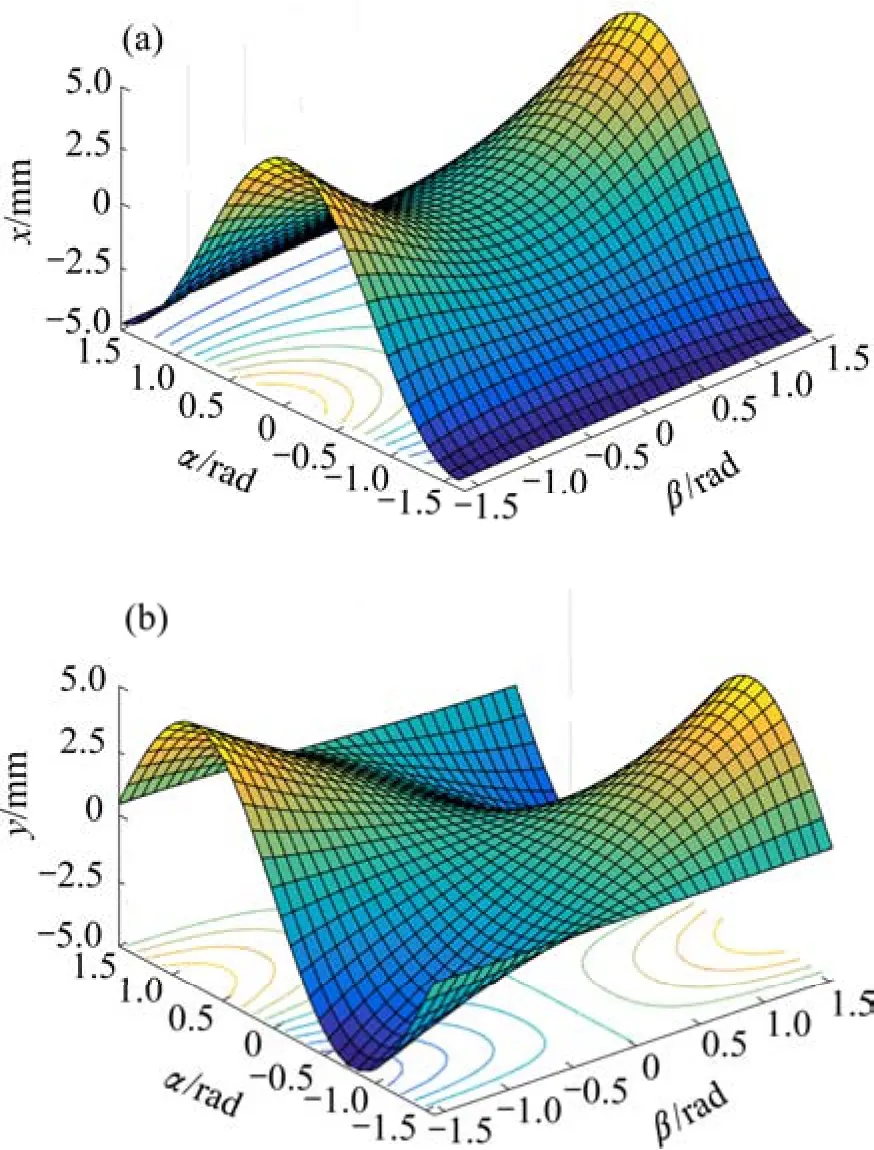
圖4 動平臺沿x,y方向移動與轉角α,β的關系Fig.4 Relation of translational motion alongx,yandα,βrotation angle of moving platform

圖5 相同約束條件下機構剛度性能對比Fig.5 Stiffness performance comparison of both mechanisms under the same constraint condition

對式(24)方程兩邊取平方得:

矩陣JTJ最大的奇異值即為矩陣J的譜范數,表示為。同理,矩陣JTJ最小奇異值的倒數為J-1的譜范數,表示為 1 /σmin,則
選取兩機構工作空間在z=60 mm的截面,求解機構在此約束條件下的條件數取值。圖6所示為兩機構在截面z=60 mm時,雅克比矩陣的條件數取值隨著α和β取值變化的情況。
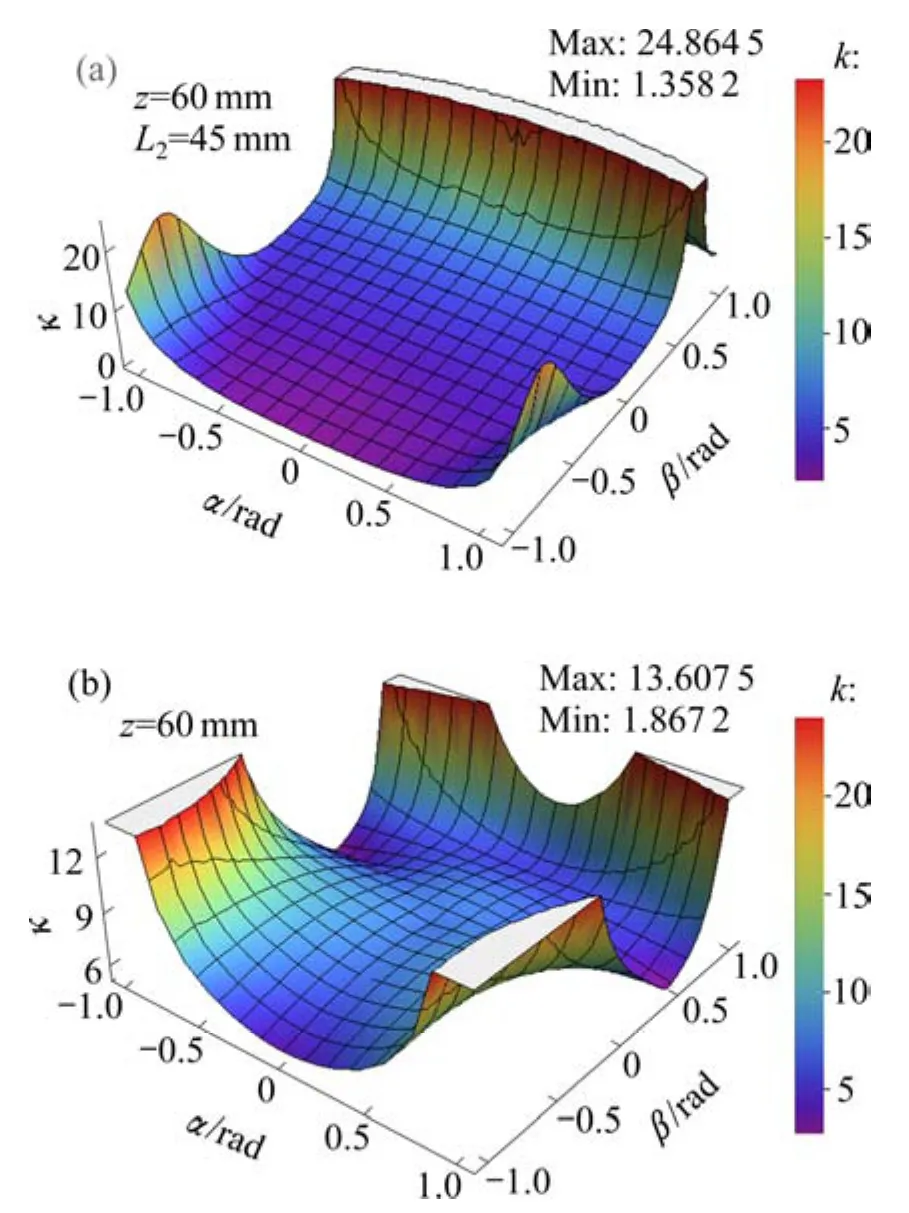
圖6 相同約束條件下機構靈巧性能對比Fig.6 Dexterity performance comparison of both mechanisms under the same constraint condition
表1 3-RS機構與2R(R)/S-2RS機構的綜合性能對比Table 1 Comprehensive comparison of 3-RS mechanism and 2R(R)/S-2RS mechanism
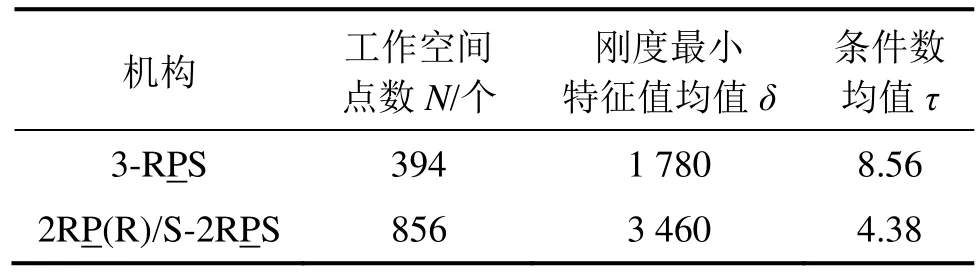
表1 3-RS機構與2R(R)/S-2RS機構的綜合性能對比Table 1 Comprehensive comparison of 3-RS mechanism and 2R(R)/S-2RS mechanism
機構 工作空間點數N/個剛度最小特征值均值δ條件數均值τ3-RPS 394 1 780 8.56 2RP(R)/S-2RP S 856 3 460 4.38
從表1可知:在3-RPS機構添加冗余驅動支鏈后,其工作空間點數N、剛度最小特征值均值δ和條件數均值τ較初始機構均增加了約2倍,從而機構的整體性能得到提升。
4 運動實驗仿真
4.1 任務路徑規劃
為證明設計可行性及機構實現應用的能力,本節對機構模型應用于機床圓弧形加工軌跡進行連續運動軌跡規劃仿真研究。首先,機構由P1點進行加速運動至P2點,再由P2點減速運動至P3點速度為0 mm/s。然后,機構末端平臺由P3點沿圓弧軌跡加速運動至P4點,再沿圓弧返回至P1點速度為0mm/s,如圖7所示。
根據各運動段給定條件,采用加速度方程為二次多項式,則動平臺在x、y方向的加速度可表示為
式中:j=1,2,3。
機構末端的速度vij(t)方程與位移sij(t)方程可對式(27)通過進行2次積分得到,j=x,y。根據各段給定要求和各運動參數在不同弧段需要滿足關系,通過給定aij(t),vij(t)和sij(t)方程中時間和位移參數,可求解出各方程表達式。
4.2 數值實驗驗證
圖4所示為機構動平臺中心點x,y方向位移對應的轉動范圍。采用 MATLAB軟件對機構刀具實現工業中常見的圓弧軌跡進行仿真,將動平臺中心點作為刀具位置,設定圓弧形軌跡半徑為r1=4 mm,完成路徑所用周期時間為8 s,仿真時間定為16 s,步長設為500。在1個周期內,前4 s動平臺中心點從P1點先加速后減速運動到P3點,后4 s從P3點返回到P1點。通過式(14)和式(15)可計算得到動平臺中心點運動軌跡所對應的各驅動桿長的變化,圖8所示為所得各驅動值的變化曲線。
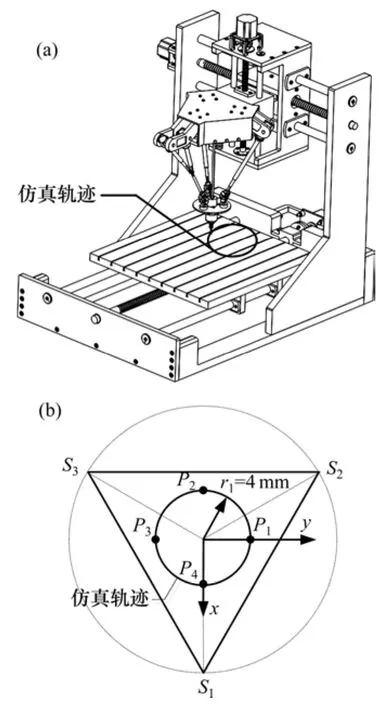
圖7 仿真運動軌跡Fig.7 Motion trajectory of simulation
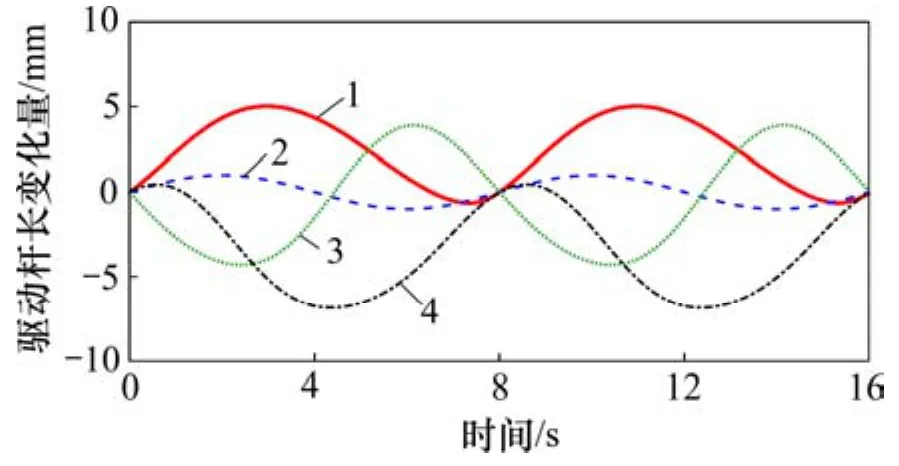
圖8 仿真所得各驅動桿長變化曲線Fig.8 Simulation curves of driving length changes
由圖8可知:機構采用高次加速度函數完成了連續圓弧軌跡運動,并由圖4中x和y方向移動與轉動耦合關系,可知在選取圓弧形軌跡半徑為r1=4 mm時對應較大的轉角范圍,仿真所得到的各驅動桿長曲線連續平穩,且未出現尖點等突變。證明所設計機構具有實現連續運動和機構應用于局部加工零部件調姿的能力。
5 結論
1) 為提高并聯機構整體性能,在傳統3-RPS機構的支鏈中添加冗余驅動分支,提出了一種新型2RP(R)/S-2RPS冗余并聯機構。根據螺旋理論求解機構末端自由度為3,而得到機構整體的自由度等于4,所提出機構存在冗余約束,證明了新型2RP(R)/S-2RPS機構為結構冗余并聯機構。
2) 對機構進行了靜剛度和靈巧性能的運動學性能評價,并利用解耦特性條件得到了機構伴隨運動的關系,對比了非冗余機構在相同約束條件下的運動性能,證明 3-RPS機構在添加冗余驅動所形成的2RP(R)/S-2RPS機構的性能得到了提升。
3) 為檢驗新型 2RP(R)/S-2RPS冗余并聯機構的可操縱性,以圓弧加工軌跡為仿真實例,對機構工作空間內進行了軌跡仿真。得到的各驅動變化曲線連續平穩,且未出現尖點等突變,證明機構可實現連續運動,并可應用于航空零件等加工。