ANC系統中對次級通道最優變步長算法的研究
2019-02-21 07:59:40劉東旭唐曉斌呂韋喜
自動化與儀表 2019年1期
袁 軍,劉東旭,唐曉斌,呂韋喜
(重慶郵電大學 光電工程學院,重慶 400065)
近年來,隨著工業設備如風扇、發動機、壓縮機和變壓器的不斷增長,聲學噪音逐漸成為一個嚴重的問題。傳統降噪方法采用的是被動噪聲控制,利用聲學包裝、安裝消聲器和設計隔聲結構來降低噪聲,這種方法因其在高頻率范圍內的高衰減噪聲受到重視,但其在較低的頻率范圍內所取得的降噪效果并不明顯且體積大、成本高。而主動噪聲控制(ANC)對低頻噪聲卻有著很好的降噪效果[1],因此受到了很大的關注。
ANC作為噪聲消除中的重要組成部分,其設計中所面臨的主要挑戰與次級通道相關。次級通道(從噪聲控制濾波器的輸出到誤差傳感器測量殘余噪聲的路徑)的存在會導致標準最小均方(LMS)算法的不穩定性,并且次級通道路徑是隨時間變化或非線性的,這又會導致ANC系統降噪性能的下降或發散。因此為了確保ANC系統的收斂,需要對次級通道路徑進行建模[2-3],以跟蹤次級路徑的變化,從而提高ANC系統降噪性能的穩定性。
由于傳統的FxLMS算法在對ANC系統的降噪性能和穩定性以及次級通道收斂速度和建模精確度等方面較為不足,所以本文采用可變步長(VSSFxLMS)算法來調整次級通道的建模濾波器。同時為了提高算法的性能并防止由于較大方差輔助白噪聲造成的不穩定效應,提出了使VSS-FxLMS算法停止在最優點(ANC系統穩定時停止次級通道輔助白噪聲的注入),這樣不僅可以提高降噪性能而且可以允許具有較大方差輔助白噪聲的注入;另外對注入次級通道的輔助白噪聲進行功率分配,這樣可以增加次級通道在線建模的精確度和收斂速率。
1 ANC的基本原理和結構
1.1 ANC的基本原理
主動噪聲控制主要是基于聲疊加原理,通過控制揚聲器在指定區域發出相對應的消聲信號來消除初始參考噪聲信號的一種噪聲控制方法[4]。如圖1所示,參考噪聲信號x(n)由參考麥克風處輸入,經過 ANC 控制系統處理后產生控制信號 y(n),y(n)驅動揚聲器發出次級信號。如果揚聲器發出消聲信號的頻率與參考噪聲信號的頻率相同且幅值相反,它們之間就會相互抵消,從而達到降噪的效果。誤差麥克風是用來監視其降噪的性能再將結果送回到ANC控制器中,進而對誤差進行不斷的調整。
1.2 次級通道的影響
次級通道在ANC系統中有著非常重要的影響,首先它是非線性的,其次引入了延遲,所以會導致LMS算法的不穩定。不穩定性問題可以通過使用FxLMS算法解決。FxLMS算法是利用與次級通道等價的濾波器S′(z)對參考噪聲信號進行預補償處理,然后注入LMS算法,從而達到減小ANC系統中由次級通道帶來的影響。該算法的前饋ANC系統簡化框圖如圖2所示,P(z)是主路徑,表示從噪聲源到誤差麥克風處的聲學響應;S(z)是次級通道;S′(z)是對次級通道S(z)的估計。
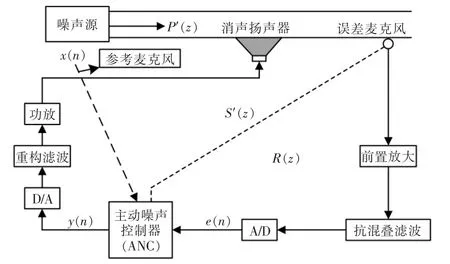
圖1 ANC系統Fig.1 ANC system
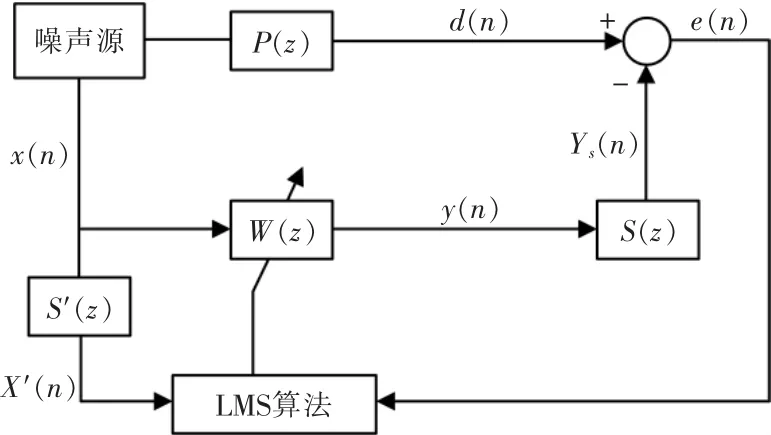
圖2 使用FxLMS算法的前饋ANC系統Fig.2 Feedforward ANC system using FxLMS algorithms
次級信號y(n)產生如下:

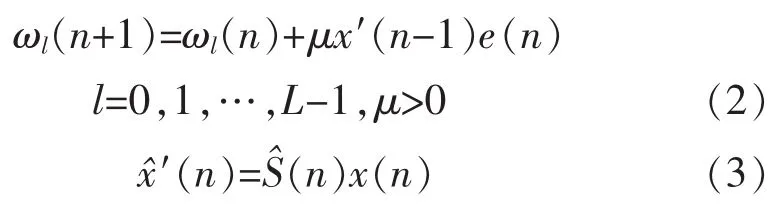
其中ω(n)和x(n)是長度為L的信號矢量的抽頭系數。W(z)表示在時間n時的FIR濾波器階數。這些抽頭系數由FxLMS算法更新如下:
2 次級通道在線建模的方法
2.1 現有結構
文獻[8]提出了使用隨機白噪聲作為訓練信號的次級通道在線建模方法,如圖3所示。該方法在ANC系統運行期間引入了另一個自適應濾波器′(z)來模擬次級通道S(z),從而達到對次級通道變化的跟蹤。后來又陸續地提出了幾種其它方法[5-6]用來提高Eriksson結構的性能。
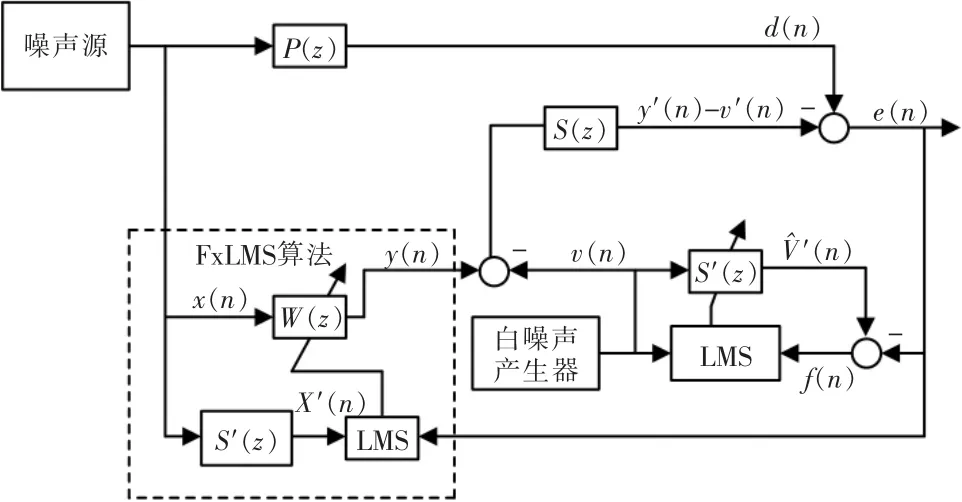
圖3 Eriksson的次級通道建模結構Fig.3 Secondary channel modeling architecture of Eriksson
由于在最近的次級通道在線建模方法中,Akhtar的方法取得了較高的性能[7],因此在這里簡要地描述一下這種算法結構。圖4所示的結構,該算法的誤差信號e(n)可以表示為

次級通道的誤差信號f(n)是由誤差麥克風處的誤差信號e(n)減去次級通道建模濾波器的濾波信號′(n)所得,f(n)的表達式為


其中μS(n)是次級通道VSS-FxLMS算法的步長參數,稍后會詳細介紹。
主控制濾波器W(z)的抽頭系數更新如下:

步驟1計算誤差信號e(n)和f(n)的功耗:

步驟2獲得兩個誤差信號功率的比值:

步驟3步長參數計算如下:

其中μSmin,μSmax和λ是通過多次實驗確定的。由文獻[6]可知,使用VSS-FxLMS算法提高了次級通道建模精度并相應地提高了ANC系統的降噪性能,Akhtar的次級通道建模結構如圖4所示。
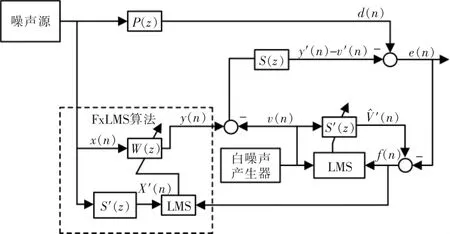
圖4 Akhtar的次級通道建模結構Fig.4 Secondary channel modeling architecture of Akhtar
2.2 改進結構
在系統運行期間阻止次級通道輔助白噪聲的連續注入會使得系統能夠受益于巨大方差白噪聲帶來的優點(具有較大方差白噪聲會使得次級通道具有更好的建模精度和收斂速度)。但是方差越大,誤差麥克風處監測到的殘留噪聲也越大,這又會降低ANC系統的降噪性能。
因此,為了利用較大方差白噪聲的優點并使ANC系統的降噪性能保持不變,我們基于文獻[6]提出了一個新的結構,如圖5所示。
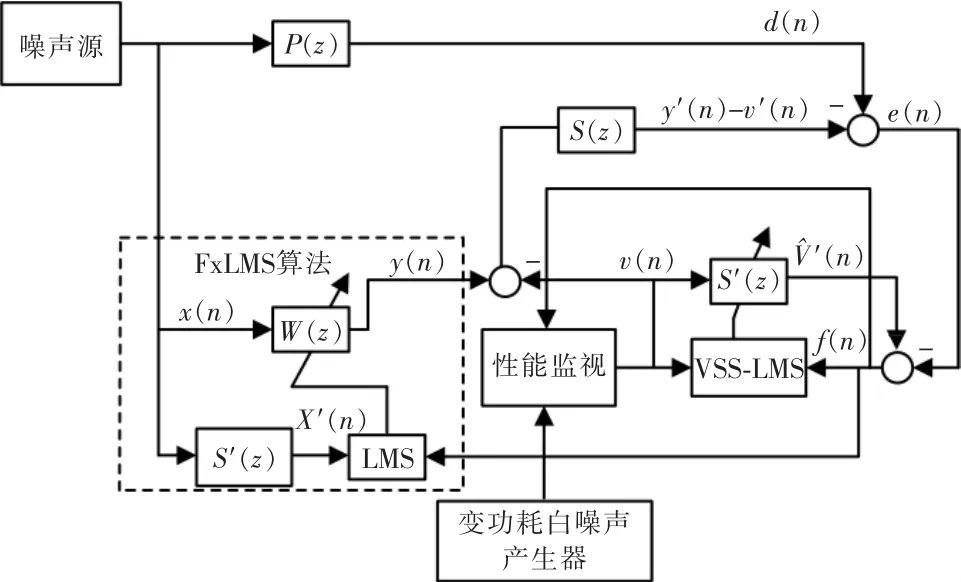
圖5 改進的次級通道建模方法Fig.5 Improved secondary channel modeling method
增加一種對輔助隨機白噪聲開關控制的策略。當ANC系統到達穩定狀態時,停止注入輔助白噪聲和次級通道的在線建模;當次級通道突然發生變化時,重新注入輔助白噪聲并對次級通道建模。這種策略既可以除去引入的輔助白噪聲對降噪效果的影響,又可以使系統能夠跟蹤次級通道的變化。
輔助隨機白噪聲可以使用式(12)在達到最佳點處停止:
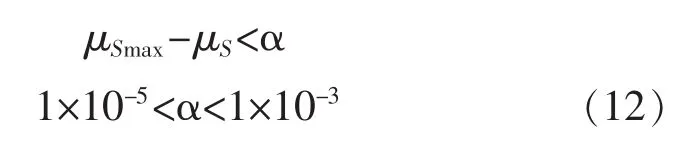
從圖5中可以看出,這個條件的有效性在性能監視模塊被控制。通過文獻[7]可以得出將α設置為較低的值,會使次級通道的建模更加精確。
通過式(13)來監視次級路徑的變化:

如果上述方程的有效性不滿足,則系統重新激活VSS-FxLMS算法并注入隨機白噪聲來重新建模次級通道濾波器(z),再使用式(12)在最佳點處停止隨機白噪聲的注入。系統在操作過程中不斷重復上述過程以適應不斷變化的環境特征。
為了進一步提高ANC系統的性能,提出的算法還對次級通道輔助隨機白噪聲v(n)的功率進行了調整。由上文可知,參數 ρ(n)可以跟蹤[d(n)-y′(n)]的變化,因此可以指示出ANC系統的收斂狀態:ρ(0)≈1,[d(n)-y′(n)]的值變大; ρ(∞)≈0,ANC系統收斂,并且[d(n)-y′(n)]的值降低。 類似于式(11),可以將次級通道輔助隨機白噪聲v(n)的方差調整如下:

式中:σ2和σ2分別是v(n)方差的最小值和最VminVmax大值,vm(n)是單位方差的隨機白噪聲。與文獻[6]相比,該方法的主要特點是:通過為σ2和σ2選擇VminVmax適當的值,可以更好地控制隨機白噪聲v(n)的方差大小,以便次級通道建模濾波器可以加快收斂速率以及跟蹤ANC系統穩態下的小變化。
3 電路仿真與結果分析
本文所提出的ANC系統采用Matlab8.6進行仿真。在整個仿真過程中,使用了文獻[9]中提供的主路徑 P(z)和次級路徑 S(z)的實驗數據。P(z)和 S(z)被認為是分別具有抽頭權重長度48和16的FIR濾波器。仿真的采樣頻率為2 kHz。通過多次實驗確定模擬次級路徑的FIR濾波器的長度以及用于噪聲消除的主控制自適應濾波器W(z)的長度分別為16和 32。
在仿真過程中,我們針對文獻[6]、文獻[8]和所提出的結構進行了3種不同狀態下的仿真且均使用文獻[6]中的參數進行設置:①分別使用較低和較大的方差白噪聲;②分別對輔助白噪聲使用固定功率和變功率;③綜合性能仿真。
為了更好地反映ANC系統的降噪性能和次級通道建模的收斂速率以及精度,使用如下公式定義:
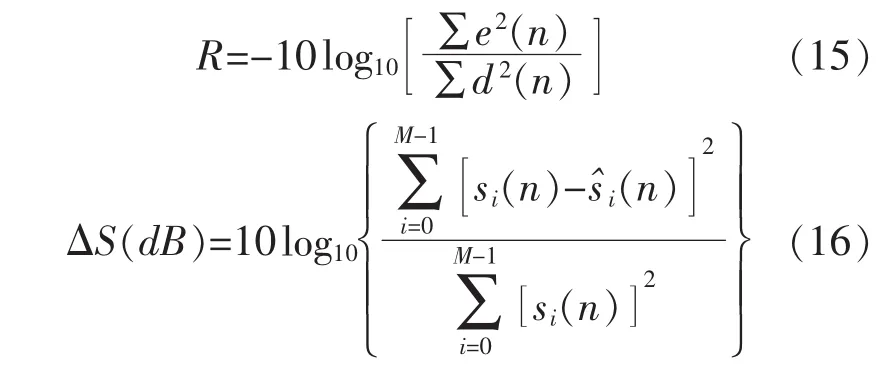
其中R反映ANC系統降噪性能的相對誤差大小,ΔS代表次級通道建模誤差大小。R的值越大和ΔS的值越小,表示降噪性能和建模精度越好。實驗仿真顯示的所有結果都是在多次實驗中取平均值得到,并與文獻[6]、文獻[10]和文獻[11]進行了對比。
3.1 控制輔助白噪聲連續注入的仿真結果
分別使用較低(0.05)和較大(0.8)的方差輔助白噪聲來評估所提出的在ANC系統穩定后停止次級通道隨機白噪聲連續注入方法的性能,仿真結果如圖6所示。
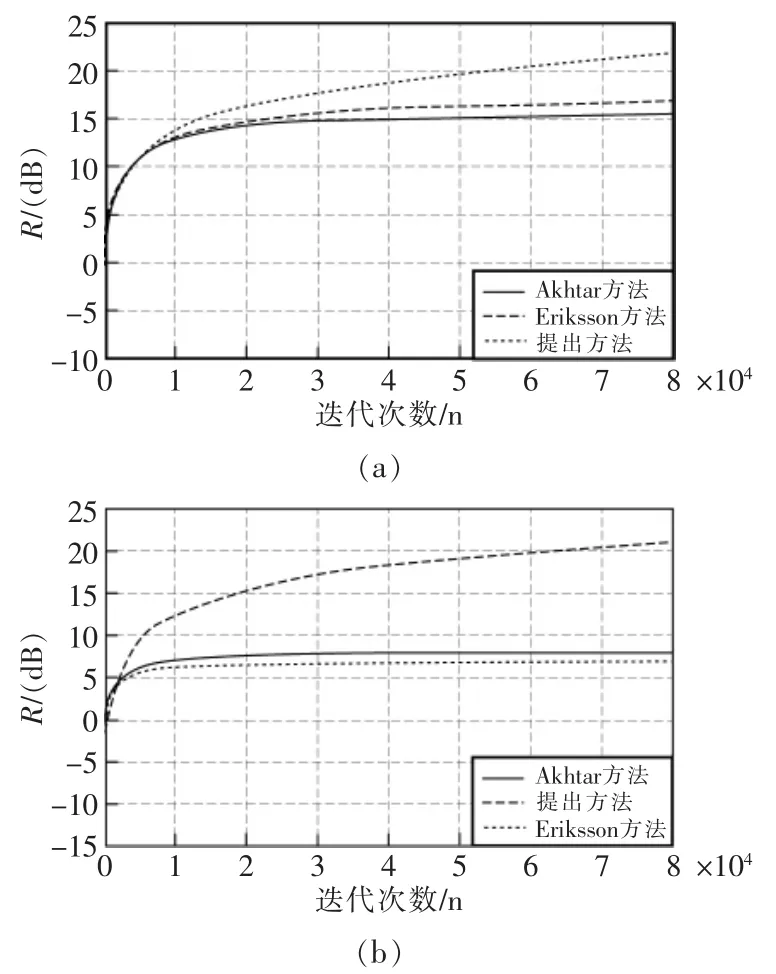
圖6 控制輔助白噪聲連續注入的仿真結果Fig.6 Simulation results of continuous injection of control-assisted white noise
圖6(a)表明,在所提出的算法達到最優點之前,三條線幾乎都重疊在一起。但是在達到最優點停止注入隨機白噪聲后,所提出的算法的曲線有了明顯的升高。可以看出,與其他方法相比,所提出的算法在降噪性能方面有著明顯的提升。圖6(b)表明,所提出的方法在使用較大方差隨機白噪聲方面保持了與較低方差隨機白噪聲基本相同的降噪性能。但與此相反,隨著隨機白噪聲方差的增大,其它兩種方法的降噪性能顯著降低。可以看出,所提出的算法可以利用較大方差隨機白噪聲帶來的優點。
3.2 輔助白噪聲功率調度的仿真結果
分別對輔助白噪聲使用固定功率和功率調度方案來評估次級通道建模濾波器的收斂性能和建模精度。次級通道建模誤差如圖7所示。可以看出,所提出的方法在保持降噪性能的同時,對次級通道建模的收斂速度和建模精度均有所提高。
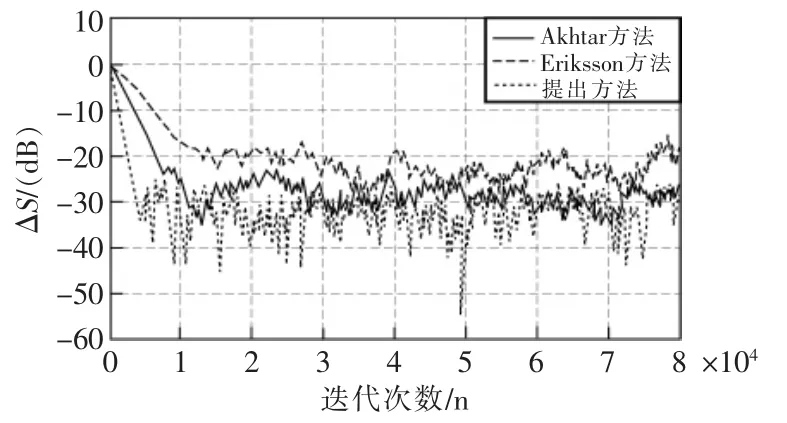
圖7 輔助白噪聲功率調度的仿真結果Fig.7 Simulation results of auxiliary white noise power scheduling
3.3 綜合仿真結果
結合上文結果,我們對ANC系統次級通道的輔助隨機白噪聲的功率調度和控制其連續注入進行了結合,通過仿真來評估ANC系統的降噪性能并對次級通道的變步長參數μS(n)也進行了仿真,結果如圖8所示。

圖8 綜合仿真結果Fig.8 Results of comprehensive simulation
圖8(a)反映了ANC系統的降噪性能。從圖中可以看出對次級通道輔助隨機白噪聲采取防止其連續注入和對其進行功率調度結合的方法,會取得比在狀態A和B單獨控制時,更為良好的結果。次級通道變步長參數μS(n)的參數如圖 8(b)所示。 從圖中可以看出,步長參數一開始較低是為了防止ANC系統的發散。隨著ANC系統逐漸穩定,步長參數逐漸增加到最大值,從而加快ANC系統的降噪速度。
表1所示為本文與參考文獻中的其他ANC系統指標對比(輔助白噪聲的方差為0.05)。可以看出,本文ANC系統具有較高的降噪性能以及較高的建模精度。
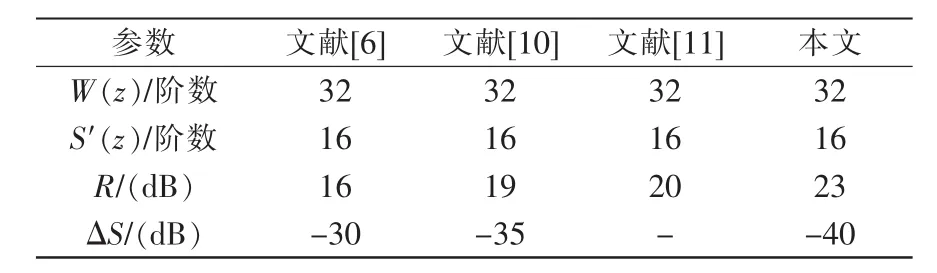
表1 本文與部分文獻中ANC的性能比較Tab.1 Performance comparison of ANC in this paper and some literatures
4 結語
本文提出了一種在ANC系統中對次級通道建模的最優變步長算法。該算法采用了次級通道在線建模和離線建模相互轉換以及次級通道輔助隨機白噪聲功率調度的方式,并結合單通道前饋有源ANC系統對其進行了性能仿真。仿真結果表明,與現有方法相比,該方法對ANC系統具有更好的降噪性能和對次級通道具有更精確的建模精度以及更快的收斂速率。研究表明防止輔助隨機白噪聲的連續注入和對輔助隨機白噪聲進行功率調度的改進方法對于實際的ANC系統更為理想。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
