一種懸臂梁式光纖光柵振動(dòng)傳感器研究
2019-02-22 09:45:54賈振安樊慶賡
壓電與聲光 2019年1期
賈振安,張 星, 李 康,樊慶賡
(西安石油大學(xué) 理學(xué)院 光電油氣測井與檢測教育部重點(diǎn)實(shí)驗(yàn)室,陜西 西安710065)
0 引言
近年來,光纖光柵傳感器憑借自身的優(yōu)點(diǎn)被學(xué)者們大量的研究,并應(yīng)用于多個(gè)領(lǐng)域。光纖光柵傳感器具有抗電磁干擾能力強(qiáng),靈敏度高,電絕緣性好,安全可靠及耐腐蝕等優(yōu)點(diǎn)[1],且在振動(dòng)領(lǐng)域的發(fā)展非常迅速。
目前,光纖光柵振動(dòng)傳感器在擴(kuò)大傳感器頻率使用范圍上做了大量的研究,如2012年,劉欽朋、喬學(xué)光等提出的兩點(diǎn)封裝加速度傳感器[2]的固有頻率為250 Hz,靈敏度為41.2 pm/g(g=9.8 m/s2);2010年,李學(xué)成、劉肅等提出的雙膜片結(jié)構(gòu)振動(dòng)傳感器[3]的固有頻率為900 Hz,而靈敏度只有24.3 pm/g;2016年,張蕓山提出的柔性鉸鏈結(jié)構(gòu)的二維加速度振動(dòng)傳感器[4]的固有頻率為1 060 Hz,其靈敏度僅為12.0 pm/g。近年來,低頻信號(hào)的檢測獲得了大量的關(guān)注,如橋梁、道路等的振動(dòng)頻率[5]一般為5~10 Hz,在工程地震中的振動(dòng)頻率為2~50 Hz,所以,在頻域要求不寬的情況下,靈敏度變得尤為重要,提高傳感器的靈敏度成為了一個(gè)重要的研究方向。
本文提出的懸臂梁式振動(dòng)傳感器靈敏度高達(dá)121 pm/g,更接近傳感器在實(shí)際環(huán)境中使用時(shí)的靈敏度要求。
1 傳感器的結(jié)構(gòu)設(shè)計(jì)與工作原理
光纖光柵振動(dòng)加速度傳感器主要由光纖光柵、懸臂梁、質(zhì)量塊、固定支座組成。為了避免光纖光柵出現(xiàn)啁啾現(xiàn)象,懸臂梁采用等腰三角形。振動(dòng)傳感器結(jié)構(gòu)示意圖如圖1所示。

圖1 振動(dòng)傳感器示意圖
振動(dòng)加速度傳感器以光纖光柵為傳感元件,將機(jī)械振動(dòng)信號(hào)轉(zhuǎn)化為光波信號(hào)。當(dāng)振動(dòng)傳感器受到豎直方向上的振動(dòng)信號(hào)激勵(lì)時(shí),質(zhì)量塊在慣性力作用下引起懸臂梁自由端上下運(yùn)動(dòng),當(dāng)懸臂梁在質(zhì)量塊的帶動(dòng)下產(chǎn)生應(yīng)變時(shí),光纖光柵將會(huì)被拉伸,光纖光柵的中心波長將會(huì)發(fā)生漂移,因此,我們只要測量光纖光柵中心波長的漂移量,就可以檢測到外界環(huán)境的加速度信號(hào)值。
2 振動(dòng)傳感器的理論分析
當(dāng)振動(dòng)傳感器在豎直方向上振動(dòng)時(shí)[4],由牛頓定律可得
(1)
式中:a為加速度;F為力;ΔL為光纖光柵的變化量;Meff為傳感系統(tǒng)的等效質(zhì)量;Keff為傳感系統(tǒng)的等效剛度。Meff[6],Keff[7]的計(jì)算式分別為
(2)
(3)
式中:m1為懸臂梁的質(zhì)量;m為質(zhì)量塊的質(zhì)量;b為懸臂梁的底邊寬度;L為懸臂梁的長度;h為懸臂梁的厚度;E為彈性模量。
光纖光柵的軸向應(yīng)變?yōu)?/p>
(4)
當(dāng)作用在光纖光柵中心波長的漂移量滿足:
ΔλB=λB(1-Pe)ε
(5)
式中:λB為光纖光柵的中心波長;Pe為光纖的有效彈光系數(shù)。
傳感器的靈敏度為
(6)
傳感器的固有頻率為
(7)
3 振動(dòng)傳感器的幅頻響應(yīng)特性研究
本次實(shí)驗(yàn)所用振動(dòng)傳感器的結(jié)構(gòu)參數(shù)為:L=60 mm,b=10 mm,h=1 mm,m1=8.01 g,封裝后的λB=1 540.462 nm,懸臂梁的彈性模量E1=2.0×1011Pa,光纖光柵的彈性模量E2=0.73 Pa。
實(shí)驗(yàn)中,加速度值為0.5g,振動(dòng)臺(tái)產(chǎn)生10~200 Hz的激勵(lì),每間隔10 Hz改變一次輸出頻率,在接近傳感器的固有頻率時(shí),每間隔2 Hz改變一次輸出頻率,在電腦上保存中心波長變化的數(shù)據(jù),圖2為根據(jù)這些數(shù)據(jù)畫成的幅頻響應(yīng)曲線圖。
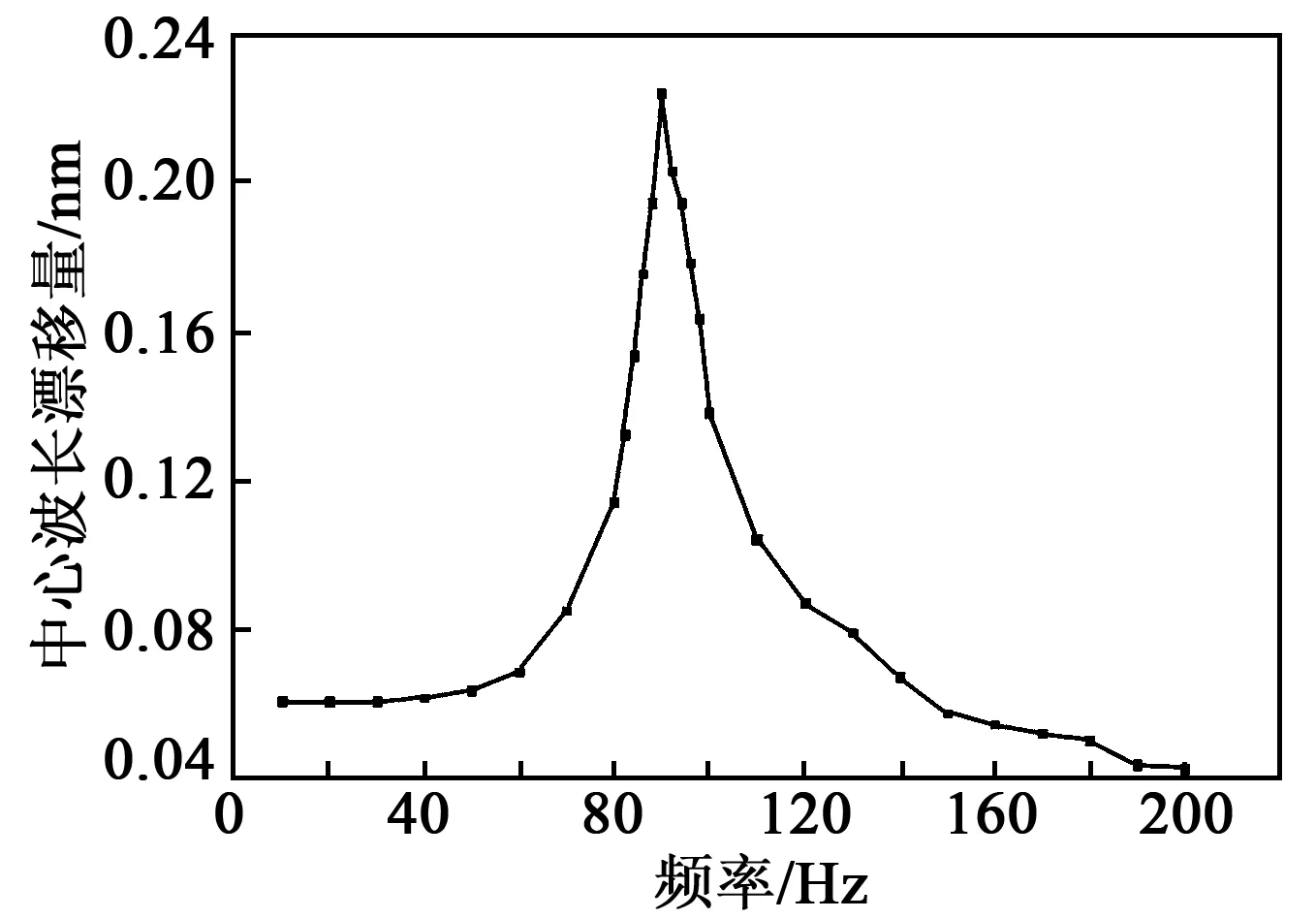
圖2 傳感器的幅頻響應(yīng)曲線圖
圖3為振動(dòng)傳感器加速度響應(yīng)曲線圖。由圖可知,振動(dòng)傳感器固有頻率為90 Hz,平坦區(qū)域在10~50 Hz。這表明振動(dòng)傳感器在低頻范圍內(nèi)具有較好的頻率響應(yīng),且可以在低頻段范圍使用。

圖3 振動(dòng)傳感器加速度響應(yīng)曲線圖
4 振動(dòng)傳感器的靈敏度特性研究
實(shí)驗(yàn)中,設(shè)定振動(dòng)臺(tái)振動(dòng)頻率為30 Hz,測量加速度值在0.5~6 m/s2內(nèi)的中心波長變化值,每間隔0.5 m/s2改變1次加速度值,記錄波長變化數(shù)據(jù)(見圖3)。由圖3可知,振動(dòng)傳感器的靈敏度為121 pm/g,加速度和中心波長的變化量具有很好的線性關(guān)系,線性度高達(dá)99.9%。
5 基于Workbench的傳感器懸臂梁疲勞仿真實(shí)驗(yàn)
本次仿真實(shí)驗(yàn)所采用懸臂梁尺寸與實(shí)驗(yàn)中的一致,密度為7 850 kg/m3,彈性模量為2.0×1011,泊松比為0.3。根據(jù)實(shí)際情形,對(duì)懸臂梁的一端添加固定約束及對(duì)懸臂梁產(chǎn)生應(yīng)變的面施加10 N的載荷。最終求解結(jié)果如圖4~6所示。
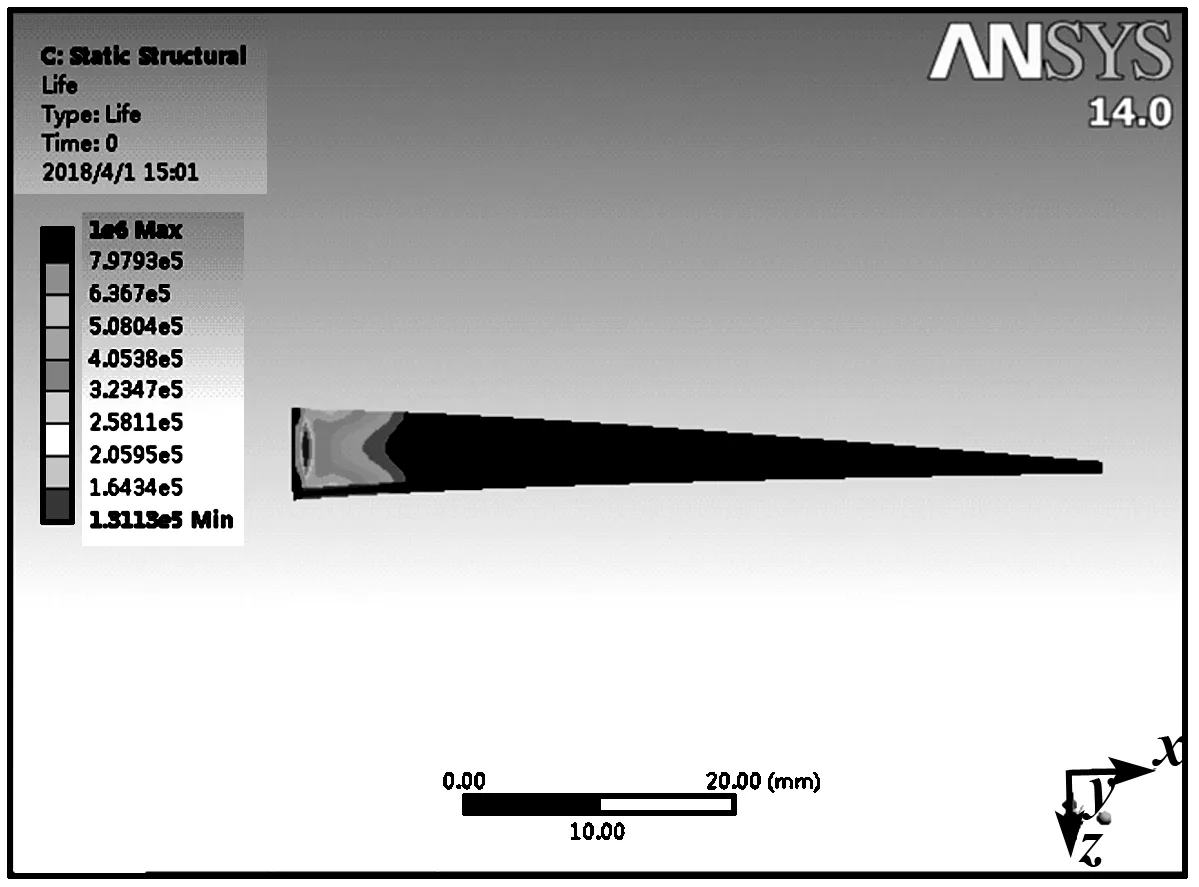
圖4 疲勞壽命圖

圖5 等效交變應(yīng)力圖

圖6 疲勞安全系數(shù)圖
6 疲勞結(jié)果分析
從圖4中可看出,懸臂梁的最小壽命為131 130 min,在理想環(huán)境下,懸臂梁至少在131 130 min后才會(huì)出現(xiàn)損傷;由圖5可知,在懸臂梁的固定端一側(cè)受到的應(yīng)力最大,最大值為128.07 MPa,應(yīng)力分布不夠均勻,在固定端一側(cè)易產(chǎn)生裂紋或斷裂;由圖6可知,懸臂梁的疲勞安全系數(shù)值為0.673 09,小于1,而比值大于1才能滿足設(shè)計(jì)要求,所以,懸臂梁易產(chǎn)生損傷。
7 改進(jìn)方案
由疲勞分析結(jié)果可知,傳感器懸臂梁的應(yīng)力分布不夠均勻,疲勞安全系數(shù)也較小,因此,為了使懸臂梁的使用壽命能夠有所增長,在懸臂梁結(jié)構(gòu)參數(shù)不變的情況下,對(duì)懸臂梁的長和寬進(jìn)行優(yōu)化改進(jìn)。我們選用ANSYS Workbench的優(yōu)化設(shè)計(jì)模塊對(duì)懸臂梁進(jìn)行了優(yōu)化,優(yōu)化后的懸臂梁兩條邊長為11 mm和54.187 mm,即懸臂梁的長為53.907 mm,底邊寬為11 mm。
8 改進(jìn)結(jié)果與分析
從優(yōu)化設(shè)計(jì)模塊中得到了優(yōu)化的懸臂梁尺寸后,我們用新尺寸對(duì)懸臂梁重新建立模型,進(jìn)行疲勞分析,得到的結(jié)果如圖7~9所示。
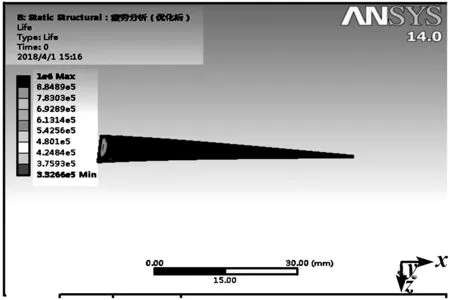
圖7 疲勞壽命圖
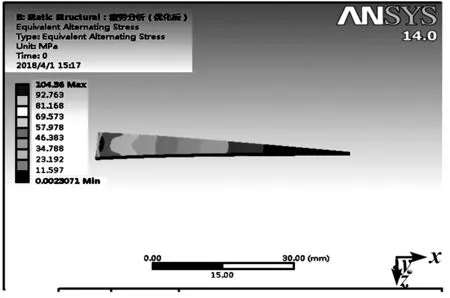
圖8 等效交變應(yīng)力圖
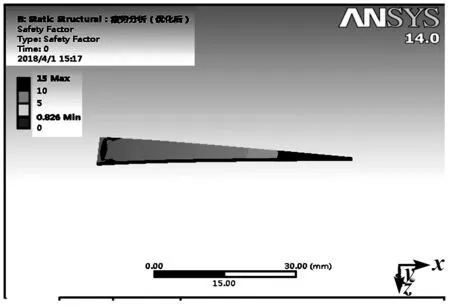
圖9 疲勞安全系數(shù)圖
從圖7中可看出,懸臂梁的最小壽命為332 660 min,即懸臂梁在332 660 min后才會(huì)出現(xiàn)損傷。優(yōu)化尺寸后的懸臂梁疲勞壽命比優(yōu)化前的壽命提高150%;由圖8可知,懸臂梁的固定端處應(yīng)力最大,最大應(yīng)力值為104.36 MPa。優(yōu)化后的最大應(yīng)力值比之前減小了18.5%;由圖9可知,懸臂梁的疲勞安全系數(shù)最小值為0.836,優(yōu)化后的最小安全系數(shù)值比之前提高了22.7%。從仿真分析的結(jié)果來看,經(jīng)過對(duì)傳感器懸臂梁尺寸進(jìn)行優(yōu)化后,懸臂梁的疲勞壽命有增加。
9 結(jié)束語
本文通過實(shí)驗(yàn)研究了振動(dòng)傳感器的幅頻響應(yīng)特性和加速度響應(yīng)特性,實(shí)驗(yàn)結(jié)果表明,固有頻率為90 Hz,靈敏度為121 pm/g。對(duì)傳感器進(jìn)行了疲勞分析與優(yōu)化改進(jìn),使懸臂梁的疲勞壽命提高了150%。在實(shí)際制作傳感器時(shí),應(yīng)先進(jìn)行優(yōu)化改進(jìn),這樣不僅可以提高傳感器的疲勞壽命,還可以針對(duì)傳感器的靈敏度和固有頻率的范圍進(jìn)行控制。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40