基于激光掃描區域動態變化的智能叉車障礙物檢測
2019-02-23 03:53:52呂恩利阮清松劉妍華王飛仁羅毅智
農業工程學報 2019年3期
呂恩利,阮清松,劉妍華,王飛仁,羅毅智
?
基于激光掃描區域動態變化的智能叉車障礙物檢測
呂恩利1,2,阮清松1,2,劉妍華3※,王飛仁1,2,羅毅智1,2
(1. 華南農業大學工程學院,廣州 510642;2. 華南農業大學南方農業機械與裝備關鍵技術教育部重點實驗室,廣州 510642;3. 華南農業大學工程基礎教學與訓練中心,廣州 510642)
為了解決干果倉儲過程中智能叉車行駛過程的障礙物誤檢問題,該文提出一種基于車速與轉向角的智能叉車障礙物動態檢測方法。智能叉車通過車載激光傳感器實時獲取車身位姿和周圍環境信息,并結合所建立的叉車運動幾何模型,形成基于水平和傾斜激光測距傳感器掃描面的雙面融合障礙物動態檢測方式,使得智能叉車的障礙物檢測區域隨車速及轉向角動態變化。試驗結果表明:水平掃描測距傳感器的試驗中,該文方法未出現誤檢情況,而扇形方法誤檢率為50.00%,矩形方法誤檢率為10.00%;傾斜掃描測距傳感器的試驗中,該文方法未出現誤檢情況,而扇形方法誤檢率為30.77%,矩形方法誤檢率為69.23%。該文方法的警情預測與實際相符,以水平掃描測距傳感器為主,傾斜掃描測距傳感器為輔,能夠檢測到的障礙物最低高度約為31 mm,有效解決了智能叉車在倉庫中的障礙物誤檢問題,較傳統障礙物檢測方法更適用于倉儲運輸,提高了智能叉車在倉庫中的機動性和安全性。該研究可為體型較大的倉儲智能運輸車輛的障礙物檢測方法提供參考。
車輛;傳感器;智能系統;動態檢測;激光掃描;倉儲
0 引 言
智能叉車是無需人為操控,能夠自主存、取貨物,具備初步人工智能的機動車輛。干果品類多、價值高,在倉儲中宜采用貨架擺放堆碼的方式存放,利用智能叉車取代人工存、取貨物,有利于提高倉儲運輸效率,促進倉儲管理規范化、智能化[1]。障礙物檢測是智能車輛能夠安全運行的首要保障,其檢測效果關系著倉儲智能叉車能否高效運作,作為智能車輛的關鍵技術,逐漸成為研究熱點[2-4]。
國內外學者對智能車輛障礙物檢測做了許多研究,如采用被動防撞障礙物檢測方式,在車輛周邊安裝緩沖裝置及壓力傳感器,待發生碰撞后,經壓力傳感器檢測觸發急停,該方式容易損壞車載高精度傳感器。另有研究人員采用主動防撞障礙物檢測方式;如利用紅外測距傳感器實現汽車障礙物檢測[5-6],以超聲波傳感器作為車輛防撞系統檢測環境的關鍵[7-8],采用毫米波測距雷達檢測目標并構建安全距離模型[9-10],為滿足AGV(automated guided vehicle)的障礙物檢測需求,通過視覺傳感器獲知前方障礙物的動、靜態以及速度、深度等信息[11-12],又如文獻[13-15]則基于激光測距傳感器所獲數據分析周圍環境,并通過劃定檢測區域構建防撞檢測系統,而在復雜場景下,多傳感器融合障礙物檢測方式也成為一種趨勢[16-17]。總體而言,各類方法都是通過檢測傳感器到前方障礙物的距離同預設安全距離作比較,判斷是否會發生碰撞,并提供預警[18-19]。然而,因預設安全距離為固定值,造成檢測區域形狀固定不變,多為扇形或矩形檢測區域,這些傳統方法適合在開闊環境中低速直行時采用,對于體型較大的倉儲運輸叉車,因轉彎時遇到的都是直角通道[20],容易出現誤檢,將不會發生碰撞的物體誤判為潛在障礙物,促使車輛改道或急停,降低叉車機動性和安全性,而目前的研究更多集中于小型多自由度智能車輛,缺乏對體型較大的倉儲智能叉車障礙物檢測方法的研究。另外,雖有部分學者為智能車輛規劃滿足車身參數約束的避障路徑[21-22],但各類避障路徑規劃方法難免存在不足,路徑跟蹤也存在偏差,避障路徑規劃又需要占用較大的規劃空間,無法有效應對突然出現的近距離障礙物,根據相關標準[23],倉庫通道寬度有限,企業應用也更多希望在安全前提下盡可能高效利用倉儲空間;因此,為防撞而設的障礙物檢測方法較避障路徑規劃更為實用[24]。綜合考慮各因素,防止發生安全事故,有必要為倉儲智能叉車設計一種適用的障礙物檢測方法。
考慮到貨叉叉取貨物時不便于環境檢測,且智能叉車多以倒車方式循跡運輸,故業內普遍將障礙物檢測傳感器安裝在叉車尾部,因此,本文以倉儲智能叉車的倒車過程舉例,利用激光導航傳感器及測距傳感器,提出一種檢測區域隨車速及轉向角動態變化的障礙物檢測方法,以解決傳統方法存在的誤檢問題,并通過試驗驗證方法的有效性和優越性。
1 叉車運動幾何模型
本文研究的倉儲智能叉車原型為杭叉集團股份有限公司生產的A30型普通電動平衡式叉車,具備三向堆垛功能,額定載荷3 000 kg,前輪為驅動輪,后輪為轉向輪,轉向軸由曲柄及連桿機構組成,全液壓助力轉向。
干果倉庫為結構化環境,地面平坦,叉車行駛速度低于1 000 mm/s,行駛過程不發生打滑;根據Ackerman轉向幾何原理,由左、右輪轉角得到叉車轉向軸中心點處等效轉向角(文中簡稱轉向角)[25-27],并建立如圖1所示的干果倉儲智能叉車運動幾何模型。本文規定逆時針旋轉的角為正值,順時針旋轉的角為負值。
通過運動幾何模型分析可得以下關系式(1)~(7):
叉車前后軸距:

式中1為導航傳感器距前軸距離,mm;2為導航傳感器距后軸距離,mm。
式中為轉向軸中心點處等效轉向角,范圍[0,60o]。
式中為整車尾部最大寬度,mm;3為叉車后懸距,mm。
叉車瞬時旋轉中心全局笛卡爾坐標:


式中為導航傳感器的全局笛卡爾橫、縱坐標,由導航傳感器直接獲得,mm;為傳感器坐標系軸正向與全局坐標系軸正向的夾角,范圍[0,360°);為導航傳感器距叉車中心軸的偏移距離,mm。


注:XOY為倉庫全局笛卡爾坐標系; xSy為車載導航傳感器的笛卡爾坐標系;S表示叉車頂部的導航傳感器位置;θ為傳感器坐標系x軸正向與全局坐標系X軸正向的夾角,范圍[0,360°);S1為叉車尾部的水平掃描測距傳感器;St為叉車尾部的傾斜掃描測距傳感器;A、B為整車尾部最大寬度處的兩端點;P1、P2分別為前、后軸中心點;U為叉車瞬時旋轉中心;K為整車最大寬度,mm;L為叉車前后軸距,mm;L1為導航傳感器距前軸距離,mm;L2為導航傳感器距后軸距離,mm;L3為叉車后懸距,mm;d為導航傳感器距叉車中心軸的偏移距離,mm;β為轉向軸中心點處等效轉向角,范圍[0,60°]。
2 障礙物動態檢測方法
障礙物動態檢測方法即依據實時車速和轉向角動態改變檢測區域的障礙物檢測方法。在智能叉車行駛過程中,若能使安全距離閾值隨車速動態變化,檢測區域形狀也隨轉向角動態變化[28-29],則能有效解決傳統方法應用于倉儲環境時的誤檢問題;另外,在倉儲環境中單一的水平掃描測距傳感器雖然可以滿足一般的障礙物檢測需求,但綜合考慮成本及安全性要求,本研究采用水平和傾斜掃描激光測距傳感器構建雙面融合的障礙物動態檢測方式。
2.1 基于水平掃描測距傳感器的障礙物動態檢測
圖2a為智能叉車順時針倒車轉彎時,基于水平掃描測距傳感器障礙物動態檢測的瞬態情境示意圖。水平掃描測距傳感器1安裝于叉車尾部中間位置,以該傳感器為原點,l為檢測區域寬度,該寬度變化方向即該傳感器笛卡爾坐標系縱軸所在方向,l為檢測區域長度,該長度變化方向即該傳感器笛卡爾坐標系橫軸所在方向,傳感器掃描面與地面平行;1、2為分布于不同位置的2個障礙物。
基于該傳感器的障礙物動態檢測過程舉例描述如下:假設當叉車以某速度行駛時其檢測區域為圖2a中小方格標示區域,此時沒有檢測到前方潛在的障礙物1,但隨車速增大,檢測區域亦動態外擴,當車速增大到某一值時擴展至圖2a中斜線標示區域,此時雖能夠發現障礙物1,卻因叉車此刻順時針倒車轉彎,依據障礙物動態檢測方法,檢測區域被裁劃為曲邊梯形(該曲邊在以點為圓心,l為半徑的圓弧上,即在叉車最外側點的運動軌跡上),若此時保持轉向角不變,叉車將不會與障礙物1發生碰撞,故無需觸發警報或停車;但若是下一時刻叉車改為逆時針轉向,隨著轉向角的增大,曲邊梯形檢測區域的曲邊將會向左擴展,待轉向角增大到某一值時該障礙物重新被劃入檢測區域并觸發警報。對于如障礙物2的近距離障礙物,只要轉向角合適,叉車能夠避開,也無需觸發警報。
2.2 基于傾斜掃描測距傳感器的障礙物動態檢測

傾斜掃描測距傳感器的障礙物動態檢測原理與基于水平掃描測距傳感器的原理基本相同,不再贅述;不同處在于其檢測區域寬度l為固定值,該值小于沿傾斜掃描面從傳感器S到地面的距離;如圖2b所示,單點畫線為傳感器S的掃描面所在位置示意,粗虛線為傳感器1的掃描面所在位置示意。
設傳感器S安裝高度為H,被檢測障礙物高度為,該障礙物動態檢測方式可檢測到的障礙物最低高度為

式中H為傳感器S安裝高度,mm;l為傾斜傳感器檢測區域寬度,mm;為傾斜傳感器安裝角度,(0,90°)。
2.3 障礙物動態檢測算法
根據上文所述障礙物動態檢測原理,下文以水平掃描測距傳感器為主,描述本文的檢測算法流程,如圖3所示,具體步驟為:
注:Q1、Q2均表示障礙物;llh為水平傳感器檢測區域長度,lwh為水平傳感器檢測區域寬度,mm;lwht為傾斜傳感器檢測區域寬度,mm;φ為傾斜傳感器安裝角度,(0, 90°)。
2)出于生產安全考慮,設定最大行駛速度max,并以此速度測得叉車的制動距離作為lmax和lmax取值的參考。其中,制動距離的計算可參考文獻[30],或可通過實測獲得,并設如下關系式:
式中為車速,mm/s;max為最大允許車速,mm/s;l、l分別為檢測區域長度初始值和寬度初始值,mm;lmax、lmax分別為檢測區域長度最大值和寬度最大值,mm。當叉車直行時,因轉向角為0,障礙物只出現在前進方向上,故l取固定值l已滿足安全需要;當叉車轉彎時,因轉向角不為0,側面障礙物對叉車構成潛在威脅,故l取公式(9)計算值。
3)初始危險信號設置為Safe,即不發生碰撞。
4)當車速<0時,觸發倒車障礙物檢測算法,將測距傳感器獲得的極坐標數據轉換成該傳感器笛卡爾坐標系的數組:
橫軸為

縱軸為

6)當10(即叉車非直行)時,將測距傳感器獲得的數據坐標更新為全局笛卡爾坐標:
橫軸為

縱軸為

7)計算各數據點到瞬時轉軸的距離

傾斜掃描測距傳感器的障礙物檢測流程與上述過程類似,不再贅述;無論水平掃描測距傳感器的危險信號為Danger,還是傾斜掃描測距傳感器的危險信號為Danger,都表示存在碰撞危險,即刻觸發相應響應。
受通道寬度和叉車最小轉彎半徑限制,對于近距離障礙物,當出現險情時,本研究采取的響應策略是讓叉車停車并報警,以保證倉儲物流安全;對于較遠距離障礙物則執行避障操作。
3 實車試驗與結果分析
實車試驗于2018年在廣東省廣州市新塘鎮西洲倉庫中進行,庫內為干燥水泥地面,貨架規整擺設。試驗實車如圖4所示,主要加裝SICK—NAV350激光導航傳感器、SICK—LMS111激光測距傳感器、SICK—TIM561激光測距傳感器;采用Twincat 3.0軟件基于Windows7系統實現算法編程、控制,并運行于倍福C6930-0050工控機上。通過采集測距傳感器檢測到的距離與方位角信息和導航傳感器所獲得的車身位姿信息,利用障礙物檢測算法處理,并記錄警報情況,若存在碰撞危險則發送危險信號,觸發警報并停車。試驗中通過改變車速和轉向角來驗證障礙物檢測效果,并根據所記錄的警報情況計算各方法的錯誤警報次數占全組試驗次數的百分比即誤檢率,分析各方法優劣,驗證障礙物動態檢測方法的有效性和優越性。
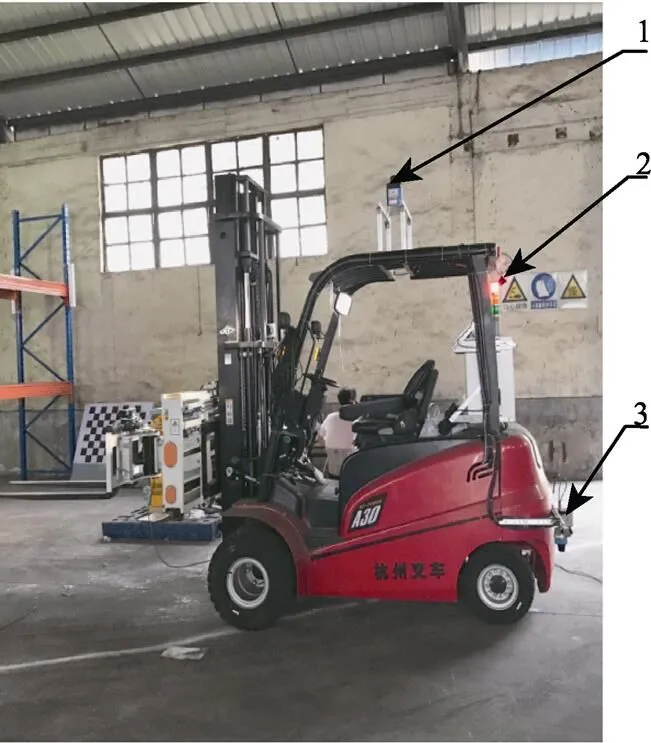
1. SICK-NAV350導航傳感器2. SICK-TIM561測距傳感器 3. SICK-LMS111測距傳感器。
3.1 主要試驗傳感器及輔助工具
4)為保證試驗結果的可靠性,對叉車主要結構及各主要部件相對位置進行了測量,用到的測量工具如精度為±0.30°的角度尺,精度為±1 mm的手持激光測距儀,精度為±1 mm/(7 m)的12線3D激光水平儀,以及鉛垂線等;測量所得參數值及其他相關參數見表1。
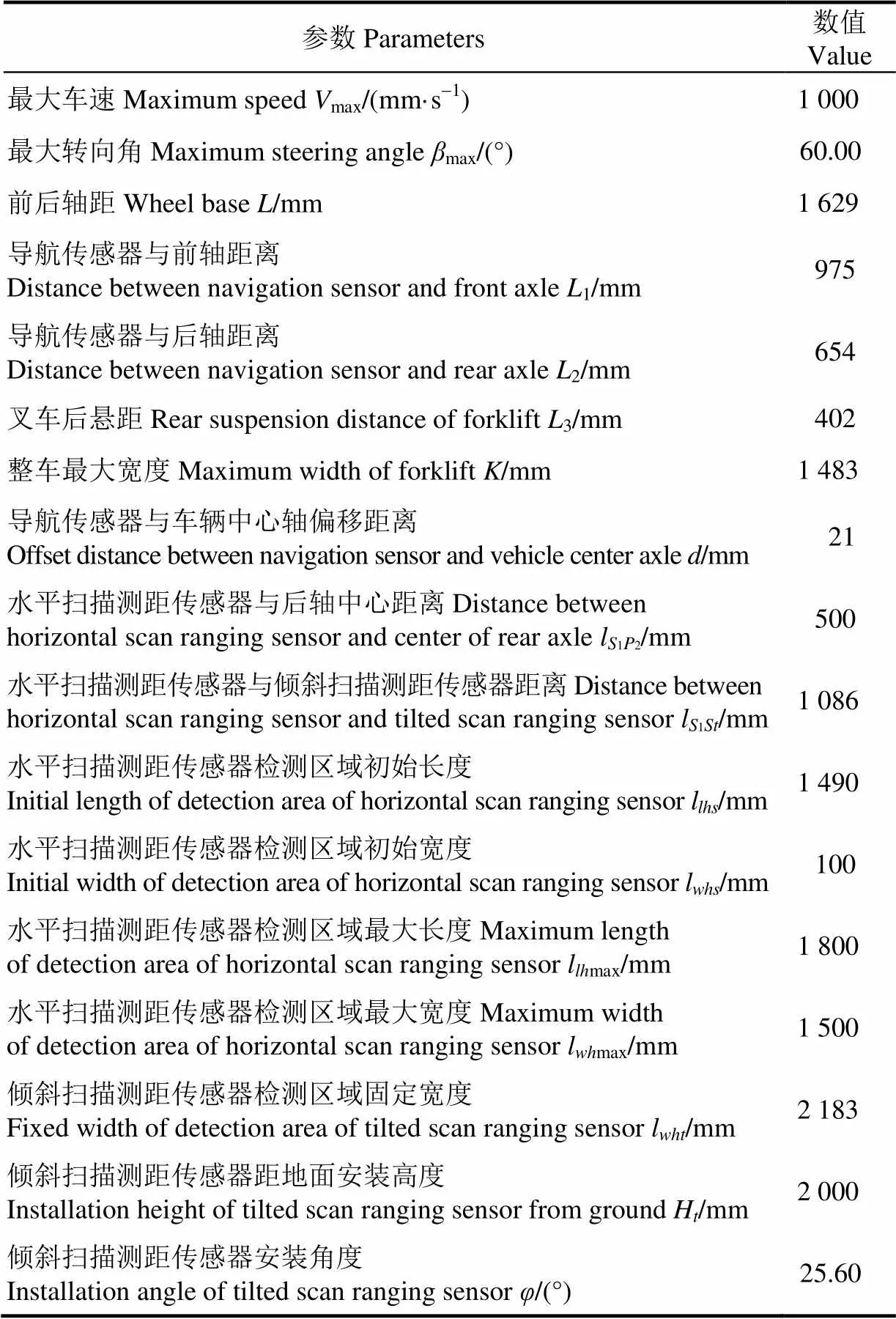
表1 算法相關參數
3.2 試驗內容及結果分析
3.2.1 基于水平掃描測距傳感器的障礙物動態檢測
試驗場景如圖5所示,以貨架2為潛在障礙物,待調整好車身位姿后,記錄此時NAV350的數據為(,,) = (2 100, 12 000, 192.35),為防止意外發生,采取叉車實際不行駛的做法,切斷工控機與驅動軸驅動電機間的通信,使叉車不前后移動,而其他如轉向輪及相關傳感器均保持正常工作狀態。待初步驗證障礙物動態檢測算法有效性后,叉車返回原位置,并依照原試驗環境設置障礙物,再于程序中預設車速和轉向角參數,讓叉車在倉庫中正常循跡行駛,驗證本文方法試驗結果與實際情況是否相符。同時,模擬2種傳統方法做對比試驗,其一為傳統扇形檢測區域法(簡稱扇形方法),即設置固定安全距離600 mm,檢測區域為扇形且大小不變;另一種為傳統矩形檢測區域法(簡稱矩形方法),即檢測區域為矩形,并設檢測區域長度為l,檢測區域寬度初始值為l,且該寬度隨車速增大而線性增大。
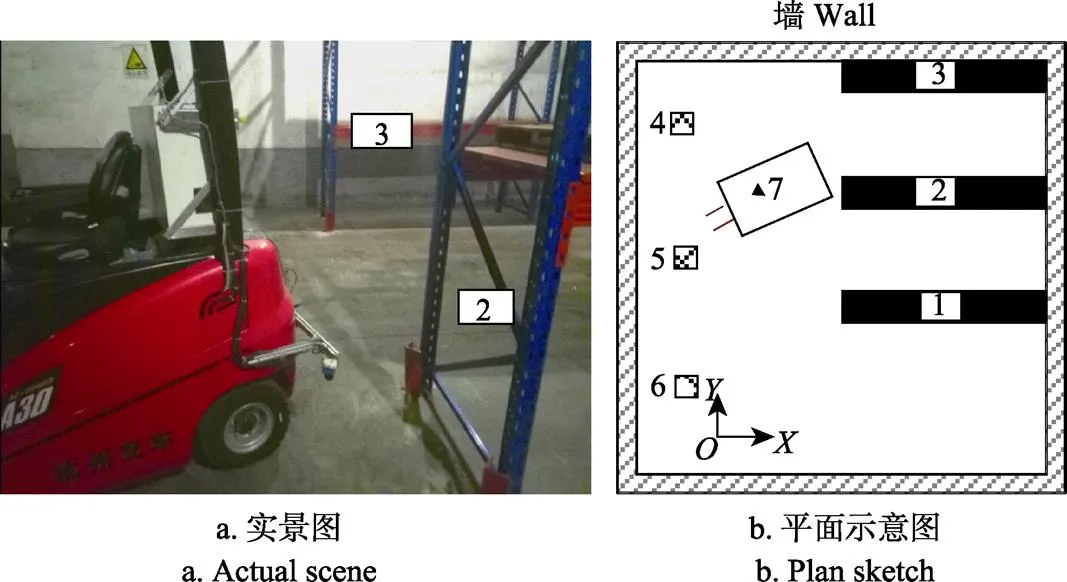
注:1、2、3表示貨架;4、5、6表示水泥柱;7表示叉車。下同。
當= 0時,觸發障礙物動態檢測算法危險警報的臨界速度為?-297 mm/s;當=-400 mm/s時,解除障礙物動態檢測算法危險警報的臨界轉向角為?17.67°。試驗結果見表2。表2中試驗1~10保持轉向角= 0,以驗證不同車速時各檢測方法的效果,當≥-290 mm/s時,本文方法和矩形方法均未報警,當≤-300 mm/s時,本文方法和矩形方法均報警,而扇形方法全程持續報警;試驗10~20保持車速=-400 mm/s,以驗證不同轉向角時各檢測方法的效果,當≤16°時,3種方法均報警,當≥18°時,本文方法警報解除,而矩形方法和扇形方法持續報警。
由表2結果分析可知,當叉車直行倒車時,即= 0,隨著車速的不斷增大,檢測范圍隨之增大,并觸發危險警報。當叉車以較大速度倒車(直行倒車必定發生碰撞時),隨著轉向角的不斷增大,危險警報解除,即表示轉向角達到一定值后叉車能夠順利避開障礙物,不存在碰撞風險。依據警情變化臨界值,分別以表2中第8組、第9組、第18組、第19組參數預設車速和轉向角,讓叉車正常行駛,經驗證本文方法警情與實際相符,未出現誤檢情況。然而,扇形方法全程都檢測到障礙物,即使叉車車速為0或當轉向角增大到叉車根本不可能碰到該障礙物時,警報也無法解除,誤檢率為50.00%;矩形方法則在速度變化時效果與本文方法一樣,但在轉向角達到18°叉車可以避開潛在障礙物時,警報仍無法解除,誤檢率為10.00%。試驗結果表明,基于水平掃描測距傳感器的障礙物動態檢測效果良好,本文方法成功消除了傳統方法中的誤檢情況,具有一定的優越性。

表2 水平掃描測距傳感器試驗結果
3.2.2 基于傾斜掃描測距傳感器的障礙物動態檢測
依據公式(8)及表1中相應參數值計算可知,傾斜掃描測距傳感器能夠檢測到的障礙物最低高度約為31 mm。試驗場景如圖6所示,以高度低于LMS111掃描平面高度(44 cm)的21 cm×11 cm×13 cm小紙盒為潛在障礙物,放于叉車必經之處,當叉車以=-224 mm/s自動行駛并遇到該障礙物觸發警報停車時,記錄此時NAV350數據(,,)=(3 363,10 630,358.184),?-4.16°,并在此時切斷工控機與驅動軸驅動電機的通信,解除停車響應,緊接著進行轉向角及車速與危險警報關系試驗,試驗方法與基于水平掃描測距傳感器的試驗基本相同,但在與傳統方法的對比試驗時,扇形方法的固定安全距離設為l,矩形方法的長度為固定值l,寬度為固定值l。
當?-224 mm/s時,解除障礙物動態檢測算法危險警報的臨界轉向角為=-8.16°;當<-8.16°時,即使速度不斷增大,也不再觸發危險警報。試驗結果見表3。表中1~6組試驗保持車速?-224 mm/s,驗證轉向角對各障礙物檢測方法的影響,當≥-7.16°時,本文方法報警,當 <-8.16°時,警報解除;表中6~13組試驗保持轉向角 =-9.16°,車速不斷增大,驗證車速對各障礙物檢測方法的影響,本文方法的警報狀態保持不變。依據警情變化臨界值,分別以表3中第4組、第5組參數預設車速和轉向角,讓叉車正常行駛,經驗證本文方法警情與實際相符,未出現誤檢情況。然而,不管轉向角和車速如何調整,扇形方法全程都檢測不到障礙物,誤檢率約為30.77%;矩形方法恰好相反,全程都能檢測到障礙物,誤檢率約為69.23%。
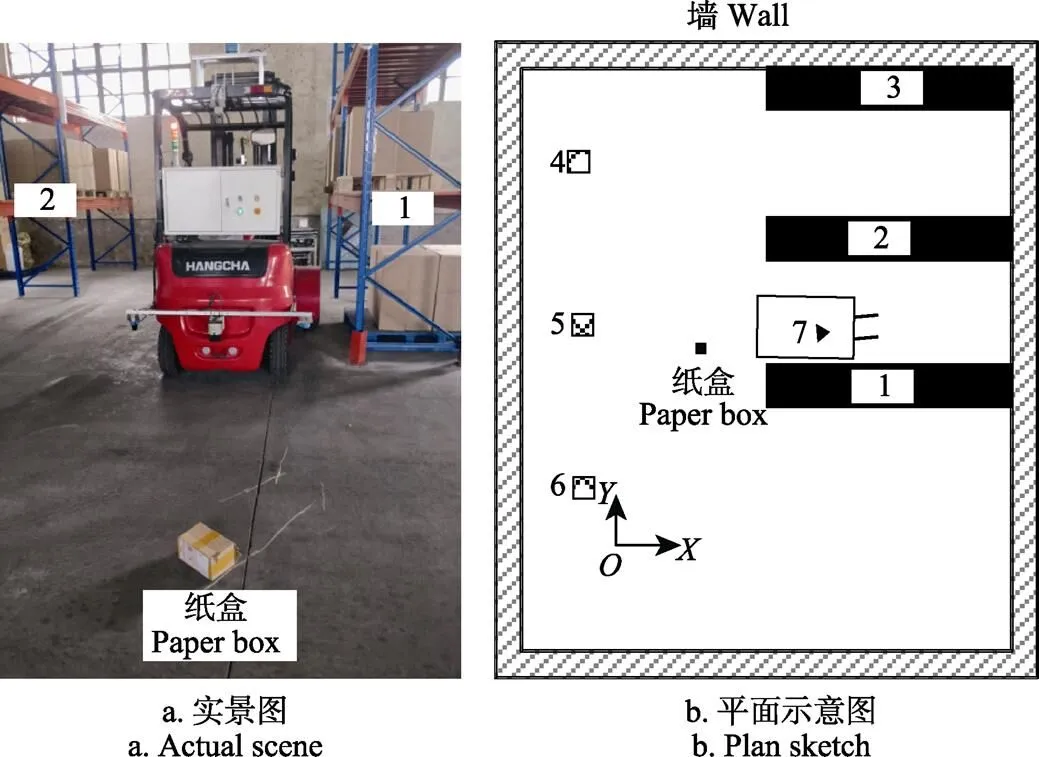
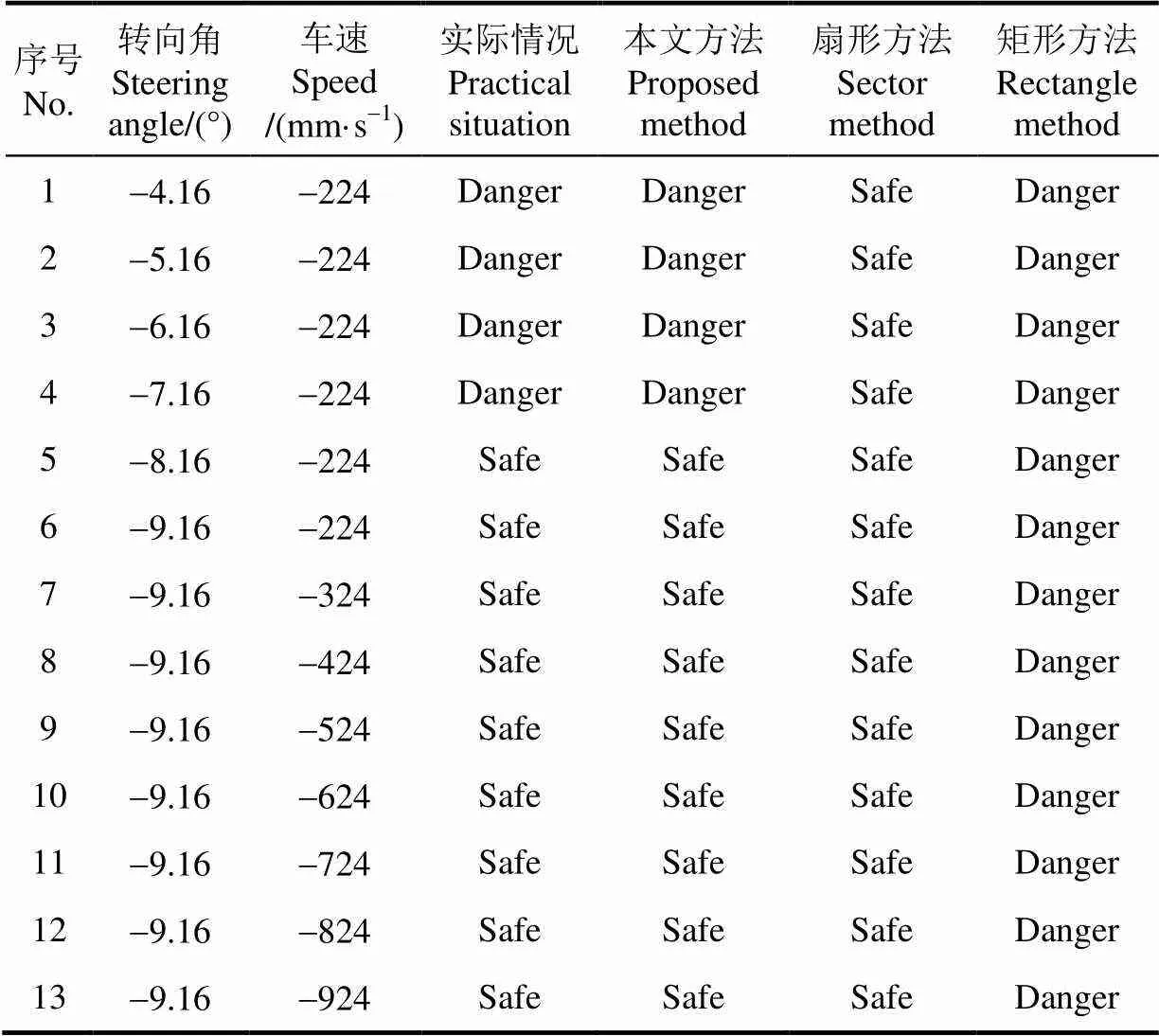
表3 傾斜掃描測距傳感器試驗結果
由表3結果分析知,當保持車速不變,隨著轉向角的增大,檢測范圍隨之減小,危險警報解除,即表示轉向角達到一定值后叉車能夠順利避開障礙物,不存在碰撞風險;然而,保持該無危險警報時的轉向角不變時,速度變化對危險警報幾乎沒有影響,分析其原因在于,斜置傳感器為單線傳感器,安裝角度固定,掃描面傾斜,檢測區域寬度為固定值,速度僅對檢測區域長度有影響,就叉車尾部頂端的傾斜掃描測距型單線傳感器而言,其障礙物動態檢測效果受轉向角變化的影響更大,故該傳感器更適合作輔助檢測。
4 結 論
1)針對干果倉儲作業中智能叉車的防撞需求,考慮到倉儲環境中傳統障礙物檢測方法的不足,本文以干果倉儲用智能叉車的倒車過程為例,融合多激光傳感器,提出一種檢測區域隨車速及轉向角變化的障礙物動態檢測方法。
2)對基于水平掃描測距傳感器和基于傾斜掃描測距傳感器的障礙物檢測效果進行試驗,在水平掃描測距傳感器試驗中,扇形方法誤檢率為50.00%,矩形方法誤檢率為10.00%;在傾斜掃描測距傳感器試驗中,扇形方法誤檢率為30.77%,矩形方法誤檢率為69.23%;而通過實際行駛驗證,本文方法警情無誤,障礙物檢測效果良好,較傳統方法具有一定的優越性。以傾斜掃描測距傳感器為輔,水平掃描測距傳感器為主,形成雙面融合的障礙物動態檢測方式,能夠有效發揮障礙物動態檢測方法在倉儲環境中的優勢,避免了叉車行駛過程中對碰撞情況的誤判,在確保行駛安全的同時,提高了智能叉車在倉庫中的機動性和倉儲利用率。本研究對其他倉儲智能運輸車輛的障礙物檢測設計具有一定的參考價值。
[1] 王琪. 新疆干果出口的主要障礙與優化路徑[J]. 湖北職業技術學院學報,2017,20(4):81-84. Wang Qi. The main obstacles and optimization path of dried fruit export in Xinjiang[J]. Journal of Hubei Polytechnic Institute, 2017, 20(4): 81-84. (in Chinese with English abstract)
[2] Lang A, Gunthner W A. Evaluation of the usage of support vector machines for people detection for a collision warning system on a forklift[C]//International Conference on Hci in Business, Canada: Springer Verlag, 2017: 322-337.
[3] Wenjie S, Yi Y, Mengyin F, et al. Real-time obstacles detection and status classification for collision warning in a vehicle active safety system[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3): 758-773.
[4] Rozsa Z, Sziranyi T. Obstacle prediction for automated guided vehicles based on point clouds measured by a tilted lidar sensor[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2708-2720.
[5] 金湘亮,曾云,陳迪平. 紅外線測距系統的建立及其在汽車防撞系統中的應用[J]. 紅外技術. 2001,23(3):43-45. Jin Xiangliang, Zeng Yun, Chen Diping. The establishment of infrared ranging system and it’s application in vehicle collision avoidance system[J]. Infrared Technology. 2001, 23(3): 43-45. (in Chinese with English abstract)
[6] 王松德,韓運俠,朱小龍,等. 近紅外傳感器在汽車改造技術中的應用研究[J]. 光譜學與光譜分析. 2005,25(7):1061-1063. Wang Songde, Han Yunxia, Zhu Xiaolong, et al. Application of near infrared sensor to the technology of automobile transformation[J]. Spectroscopy and Spectral Analysis . 2005, 25(7): 1061-1063. (in Chinese with English abstract)
[7] 仇成群,胡天云. 基于超聲波的汽車防撞報警系統的設計[J]. 制造業自動化. 2009,31(4):75-77.Qiu Chengqun, Hu Tianyun. The vehicle collision avoidancealarm apparatus system based on ultrasonic[J]. Manufacturing Automation. 2009, 31(4): 75-77. (in Chinese with English abstract)
[8] 張瑩,張進,劉天飛. 超聲波倒車防撞系統[J]. 通信技術. 2011,44(2):130-132. Zhang Ying, Zhang Jin, Liu Tianfei. Ultrasonic back-draft anti-collision system[J]. Communications Technology. 2011, 44(2): 130-132. (in Chinese with English abstract)
[9] 裴曉飛,劉昭度,馬國成,等. 汽車主動避撞系統的安全距離模型和目標檢測算法[J]. 汽車安全與節能學報,2012,3(1):26-33. Pei Xiaofei, Liu Zhaodu, Ma Guocheng, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Journal of Automotive Safety and Energy. 2012, 3(1): 26-33. (in Chinese with English abstract)
[10] 張昱,宋驪平,虎小龍. 基于概率假設密度的汽車防撞雷達多目標跟蹤[J]. 現代雷達. 2014,36(6):82-87. Zhang Yu, Song Liping, Hu Xiaolong. Multiple targets tracking of vehicle anti-collision radar based on probability hypothesis density[J]. Modern Radar. 2014, 36(6): 82-87. (in Chinese with English abstract)
[11] Gohara R, Premachandra C, Kato K. A study on smooth automatic vehicle stopping control for suddenly-appeared obstacles[C]//International Conference on Vehicular Electronics and Safety. IEEE, 2015: 86-90.
[12] 王錚,趙曉,佘宏杰,等. 基于雙目視覺的AGV障礙物檢測與避障[J]. 計算機集成制造系統. 2018,24(2):400-409. Wang Zheng, Zhao Xiao, She Hongjie, et al. Obstacle detection and obstacle avoidance of AGV based on binocular vision[J]. Computer Integrated Manufacturing Systems. 2018, 24(2): 400-409. (in Chinese with English abstract)
[13] 常鳳筠,崔旭東. 基于激光測距傳感器的汽車防撞報警器的設計[J]. 應用激光. 2007,27(1):45-46. Chang Fengjun, Cui Xudong. The design of the vehicle anti-collision alarm apparatus based on distance laser sensor[J]. Applied Laser. 2007, 27(1): 45-46. (in Chinese with English abstract)
[14] Kawarazaki N, Kuwae L T, Yoshidome T. Development of human following mobile robot system using laser range scanner[J]. Procedia Computer Science. 2015, 76: 455-460.
[15] 鄒斌,譚亮,侯獻軍. 基于激光雷達的道路可行區域檢測[J]. 武漢理工大學學報:交通科學與工程版. 2017,41(2):203-207. Zou Bin, Tan Liang, Hou Xianjun. Drivable road regions detection based on lidar[J]. Journal of Wuhan University of Technology: Transportation Science and Engineering. 2017, 41(2): 203-207. (in Chinese with English abstract)
[16] Alajlan A M, Almasri M M, Elleithy K M. Multi-sensor based collision avoidance algorithm for mobile robot[C]// IEEE Long Island Systems, Applications and Technology Conference. IEEE, 2015: 1-6.
[17] Almasri M M, Alajlan A M, Elleithy K M. Trajectory planning and collision avoidance algorithm for mobile robotics system[J]. IEEE Sensors Journal. 2016, 16(12): 5021-5028.
[18] Mukhtar A, Xia L, Tang T B. Vehicle detection techniques for collision avoidance systems: A review[J]. IEEE Transactions on Intelligent Transportation Systems. 2015, 16(5): 2318-2338.
[19] 何勇,蔣浩,方慧,等. 車輛智能障礙物檢測方法及其農業應用研究進展[J]. 農業工程學報. 2018,34(9):21-32. He Yong, Jiang Hao, Fang Hui, et al. Research progress of intelligent obstacle detection methods of vehicles and their application on agriculture[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE). 2018, 34(9): 21-32. (in Chinese with English abstract)
[20] 中國國家標準化管理委員會,中華人民共和國國家質量監督檢驗檢疫總局. GB/T 6104-2005,機動工業車輛-術語[S].北京:中國標準出版社,2006.
[21] 曹昊天, 宋曉琳, 黃江. 基于彈性繩理論的自主車輛防碰撞的路徑規劃[J]. 汽車工程. 2014, 36(10): 1230-1236. Cao Haotian, Song Xiaolin, Huang Jiang. Path planning of autonomous vehicle for collision avoidance based on elastic band theory[J]. Automotive Engineering. 2014, 36(10): 1230-1236. (in Chinese with English abstract)
[22] 彭理群,吳超仲,黃珍,等. 考慮駕駛意圖與動態環境的汽車避碰路徑規劃[J]. 交通運輸系統工程與信息. 2016, 16(6):81-87. Peng Liqun, Wu Chaozhong, Huang Zhen, et al. Collision avoidance path planning with consideration of driver intention and dynamic traffic situation[J]. Journal of Transportation Systems Engineering and Information Technology. 2016, 16(6): 81-87. (in Chinese with English abstract)
[23] 中華人民共和國工業和信息化部. JB/T 3300-2010,平衡重式叉車—整機試驗方法[S]. 北京:中國標準出版社,2010.
[24] 胡靜濤,高雷,白曉平,等. 農業機械自動導航技術研究進展[J]. 農業工程學報. 2015,31(10):1-10. Hu Jingtao, Gao Lei, Bai Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering. 2015, 31(10): 1-10. (in Chinese with English abstract)
[25] 李朋. 汽車主動防撞系統控制模式的研究[D]. 南京:南京航空航天大學,2012. Li Peng. Research of the Control Mode of Automotive Active Collision Avoidance System[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012. (in Chinese with English abstract)
[26] 徐豪. 汽車主動防撞預警系統規避控制研究[D]. 長春:吉林大學,2012. Xu Hao. Research on Active Control of Vehicle Anti-Collision Warning System[D]. Changchun: Jilin University, 2012. (in Chinese with English abstract)
[27] 李紅. 自動泊車系統路徑規劃與跟蹤控制研究[D]. 長沙: 湖南大學,2014. Li Hong. A Study on Path Planning and Tracking Control Method for Automatic Parking System[D]. Changsha: Hunan University, 2014. (in Chinese with English abstract)
[28] 唐陽山,夏道華. 駕駛員對汽車防撞安全距離檢測仿真研究[J]. 計算機仿真. 2016,33(7):449-453. Tang Yangshan, Xia Daohua. Driver to simulation study of automobile anti-collision safety distance detection[J]. Computer Simulation. 2016, 33(7): 449-453. (in Chinese with English abstract)
[29] Clotet E, Martinez D, Moreno J, et al. Assistant personal robot (APR): Conception and application of a tele-operated assisted living robot[J]. Sensors. 2016, 16(5): 610-633.
[30] Matthies L, Grandjean P. Stochastic performance modeling and evaluation of obstacle detectability with imaging range sensors[J]. IEEE Transactions on Robotics and Automation. 1994, 10(6): 783-792.
Intelligent forklift obstacle detection based on dynamic change of laser scanning area
Lü Enli1,2, Ruan Qingsong1,2, Liu Yanhua3※, Wang Feiren1,2, Luo Yizhi1,2
(1.510642,; 2.510642,; 3.510642,)
Dried fruits should be stored in warehouse by placing and stacking on the shelves. By using intelligent forklift to store and take goods on the shelves, the warehouse efficiency could be effectively solved, and the warehouse management of dried fruits could be promoted to be standardized and intelligent. Obstacle detection is the primary guarantee for the safe operation of intelligent forklifts, and the detection effect is also related to the efficient operation of intelligent forklifts in warehouse, as a key technology of intelligent vehicles, it has gradually become a research hot topic.However, the current researches focuse on small multi-degree-freedom intelligent vehicles, there is no research on obstacles detection methods for large intelligent forklift in dried fruit warehouse. Considering the limitations of warehouse layout, the detection region of traditional detection methods were mostly fixed shape, that means that the safety distance was fixed, so it was more suitable when forklift going straight in an open space, on the contrary, in the dried fruit warehouse with limited channel width, especially when turning, there would be false alarm, which would easily cause the large intelligent forklift to misjudge the objects that could be bypassed into potential obstacles, thus causing the forklift to change the road or stop sharply. In order to solve the false detection and realize the obstacle dynamic detection for large intelligent forklift in dried fruit warehouse, taking the reversing processof intelligent forklift as an example, an obstacles dynamic detection method based ondynamic change of laser scanning area with the speed and steering angle of large intelligent forklift in dried fruit warehouse was proposed in this paper. The real-time position and direction information of forklift in the global Cartesian coordinate system of warehouse was obtained by using on-board laser sensor SICK-NAV350, combining with the motion geometry model of forklift, the horizontal laser ranging sensor (SICK-LMS111) and the inclined laser ranging sensor (SICK-TIM561) scanning the obstacle in 2 planes, forming a dynamic detection area changing with the speed and steering angle of forklift. The real vehicle test results showed that the proposed method without error checking, the error detection rate of the sector method was 50.00% and that of the rectangle method was 10.00% in the testing of horizontal scan ranging sensor, the error detection rate of the sector method was 30.77% and that of the rectangle method was 69.23% in the testing of tilted scan ranging sensor. With tilted scanning range sensor as the auxiliary and horizontal scanning range sensor as the main part, a dynamic obstacle detection area based on fusion of 2 planes was formed, the minimum height of obstacles could be detected was about 31 mm when the installation angle of sensor SICK- TIM561 was 25.60°, the height to ground was 2 000 mm and the detection region width was set to 2 183 mm. The proposed method effectively solved the false alarm of intelligent forklift when driving in the warehouse, and was more suitable for warehousing and transportation than the traditional detection method, and improved the mobility and safety of intelligent forklift in warehouse. The research can provide reference for obstacle detection of large warehouse intelligent transport vehicles.
vehicles; sensors; intelligent system; dynamic detection; laser scan; warehouses
呂恩利,阮清松,劉妍華,王飛仁,羅毅智. 基于激光掃描區域動態變化的智能叉車障礙物檢測[J]. 農業工程學報,2019,35(3):67-74. doi:10.11975/j.issn.1002-6819.2019.03.009 http://www.tcsae.org
Lü Enli, Ruan Qingsong, Liu Yanhua, Wang Feiren, Luo Yizhi. Intelligent forklift obstacle detection based on dynamic change of laser scanning area[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 67-74. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.03.009 http://www.tcsae.org
2018-09-02
2019-01-07
國家重點研發計劃子任務(2018YFD0701002);國家自然科學基金項目(51108194);廣東省省級(基礎研究及應用研究重大)項目(2016KZDXM028);廣州市科技計劃項目(201704020067)
呂恩利,副教授,博士生導師,主要研究方向為農業工程、農產品冷鏈物流裝備、智能倉儲運輸裝備控制研究。Email:enlilv@scau.edu.cn
劉妍華,博士,副教授,主要研究方向為農產品冷鏈物流和農業設施節能設計。Email:cynthial@scau.edu.cn
10.11975/j.issn.1002-6819.2019.03.009
S229.2
A
1002-6819(2019)-03-0067-08
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
