四樁腿海洋平臺(tái)支反力計(jì)算研究?
2019-02-27 08:10:42宮經(jīng)海佟姝茜王秉權(quán)
艦船電子工程 2019年1期
關(guān)鍵詞:方法
宮經(jīng)海 佟姝茜 王秉權(quán)
(太重(天津)濱海重型機(jī)械有限公司技術(shù)中心 天津 300457)
1 引言
隨著陸地石油資源的枯竭,世界各國對(duì)海洋石油開發(fā)越來越重視,都加緊對(duì)海洋石油的開發(fā)利用。自升式平臺(tái)是海洋石油、天然氣資源開發(fā)的基礎(chǔ)性設(shè)施,是海上生產(chǎn)和生活的基地,在海洋石油開發(fā)中應(yīng)用十分廣泛。自升式平臺(tái)由平臺(tái)主體、樁腿、升降系統(tǒng)等組成[1],在海上作業(yè)時(shí),不僅要承受結(jié)構(gòu)和設(shè)備的自重和作業(yè)載荷,還要承受惡劣的海洋環(huán)境,如風(fēng)、浪、流等載荷影響[2~3]。由于海床地基不平,當(dāng)受較大的環(huán)境荷載作用時(shí),側(cè)向力會(huì)影響平臺(tái)樁腿之間對(duì)地壓力的分布,導(dǎo)致各樁腿之間受力不同,帶來不穩(wěn)定影響。自升式平臺(tái)各樁腿之間支反力大小關(guān)系到整個(gè)平臺(tái)的安全,十分重要。目前,樁腿數(shù)量以3條、4條居多[4]。但三樁腿平臺(tái)和四樁腿平臺(tái)的支反力計(jì)算過程卻有著十分巨大的差別。
三樁腿平臺(tái)可直接通過力的平衡方程得到結(jié)果,而四樁腿平臺(tái)則相對(duì)復(fù)雜。常規(guī)解法有力法、位移法等[5~6],但是其形式繁瑣,計(jì)算過程復(fù)雜。本文基于某375ft自升式生活輔助平臺(tái),提出一種新的計(jì)算方法,所得結(jié)果簡(jiǎn)單明了,可以在海洋平臺(tái)的總體設(shè)計(jì)初期對(duì)地壓力的評(píng)估中廣泛使用。為了驗(yàn)證研究結(jié)論的準(zhǔn)確性,本文利用有限元計(jì)算,對(duì)估算結(jié)果進(jìn)行校核,驗(yàn)證結(jié)果相吻合。
2 三樁腿支反力計(jì)算
對(duì)于三樁腿自升式海洋平臺(tái)來說,樁靴與地基接觸位置可以簡(jiǎn)化成三個(gè)鉸支點(diǎn),將平臺(tái)整體的重量簡(jiǎn)化為重心處的集中力,作用到由樁腿圍成的三角形面上,假定樁靴與地基接觸均在同一水平面上。如圖1所示。
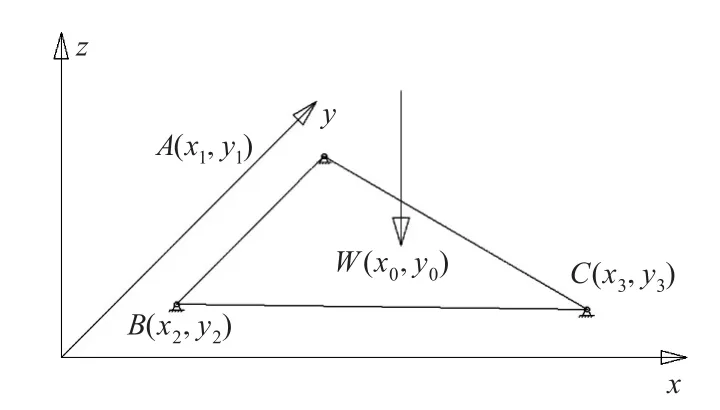
圖1 三樁腿平臺(tái)示意圖
建立力的平衡方程:
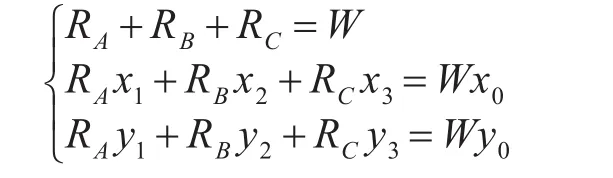
通過上述方程,可求得三個(gè)鉸支點(diǎn)的支反力RA,RB,RC。不難看出,三樁腿平臺(tái)支反力的計(jì)算屬于靜定問題,很容易通過力的平衡方程計(jì)算得到。
3 四樁腿支反力計(jì)算
平臺(tái)與三樁腿平臺(tái)的的計(jì)算過程有很大不同。四樁腿平臺(tái)可以簡(jiǎn)化成在同一水平面上的四點(diǎn)鉸接,長邊長度為a,短邊長度為b,同時(shí)受集中力作用的矩形面,并認(rèn)為滿足薄板理論[7]。如圖2所示。
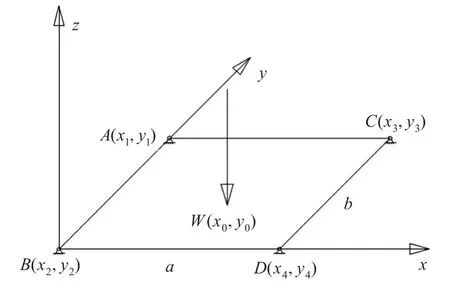
圖2 四樁腿平臺(tái)示意圖
建立力的平衡方程,能夠得到三個(gè)方程,但卻有四個(gè)未知數(shù) RA,RB,RC,RD,為典型的超靜定問題。對(duì)于這類超靜定問題,常規(guī)的解法有力法、位移法等。現(xiàn)以力法為例加以說明。
使用力法計(jì)算超靜定問題,具體步驟如下:
1)去掉C點(diǎn)約束,并在C點(diǎn)增加支反力RC;
2)在集中力W單獨(dú)作用下,C點(diǎn)會(huì)產(chǎn)生位移Δ1,在支反力RC單獨(dú)作用下,C點(diǎn)會(huì)產(chǎn)生位移Δ2;
3)由于C點(diǎn)真實(shí)位移為零,故Δ1+Δ2=0,即可求得支反力RC;
4)建立三個(gè)力的平衡方程,從而解出RA,RB,RD。
由力法的計(jì)算過程可以看出,其思路是通過增加一個(gè)變形協(xié)調(diào)方程,將超靜定問題轉(zhuǎn)化為靜定問題。但這樣做,形式繁瑣,計(jì)算過程復(fù)雜。其他常規(guī)方法計(jì)算也有類似缺點(diǎn)。
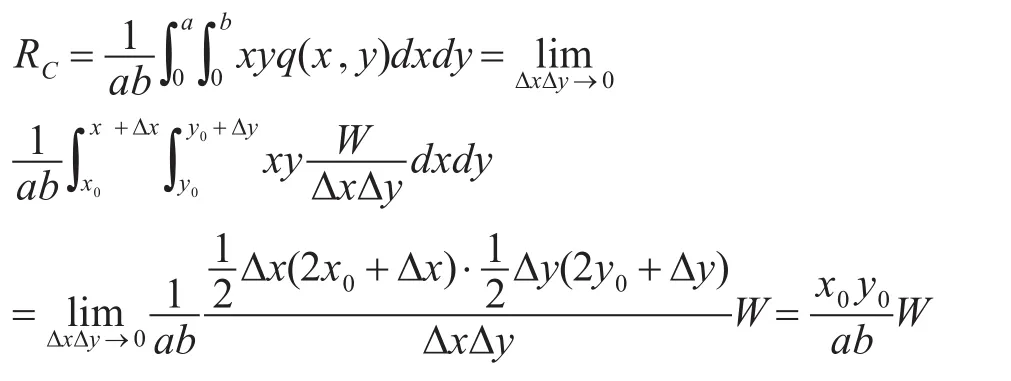
從上述方法中可以看到,計(jì)算的主要難點(diǎn)在于通過變形協(xié)調(diào)方程計(jì)算支反力。對(duì)于四點(diǎn)鉸支,在均布載荷作用下的矩形面,C點(diǎn)支反力為[8~9]:

對(duì)于集中力作用下情況,可以假設(shè)在距離作用點(diǎn)很小的范圍內(nèi),集中力均勻分布。即在[x0,x0+Δx]、[y0,y0+Δy]范圍內(nèi),可以將集中力W等效為均布載荷,如圖3所示。由此,可以給出以下推導(dǎo)。
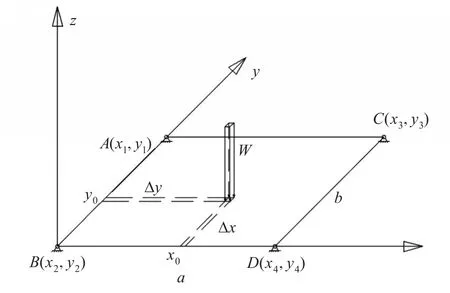
圖3 均布載荷作用下四樁腿平臺(tái)示意圖
集中力作用在四端鉸支的矩形面時(shí),C點(diǎn)支反力RC為
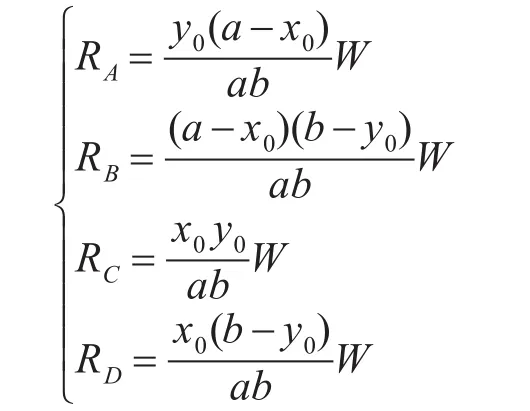
對(duì)于其他支反力的計(jì)算,可以采用類似方法。需要注意的是,計(jì)算其他支反力時(shí),需要進(jìn)行坐標(biāo)系變換[10~11]。
經(jīng)計(jì)算,各鉸支點(diǎn)支反力為
所得結(jié)果還應(yīng)滿足力的平衡方程:
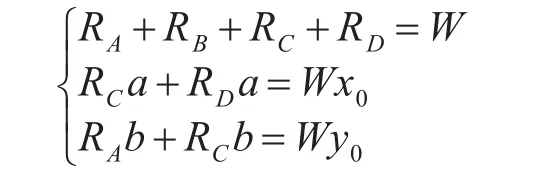
將所得支反力代入力的平衡方程,經(jīng)驗(yàn)證,能夠滿足力的平衡方程。
4 實(shí)際應(yīng)用
某375ft自升式生活輔助平臺(tái)采用四樁腿結(jié)構(gòu)形式,其中,a=42m,b=31.6m。不同載況下平臺(tái)重量重心如表1所示。

表1 不同載況下平臺(tái)重量重心
現(xiàn)采用本文所述方法計(jì)算在不同載況下各樁腿的支反力,并與使用有限元軟件所得結(jié)果進(jìn)行比較[12]。如表2~表4所示。
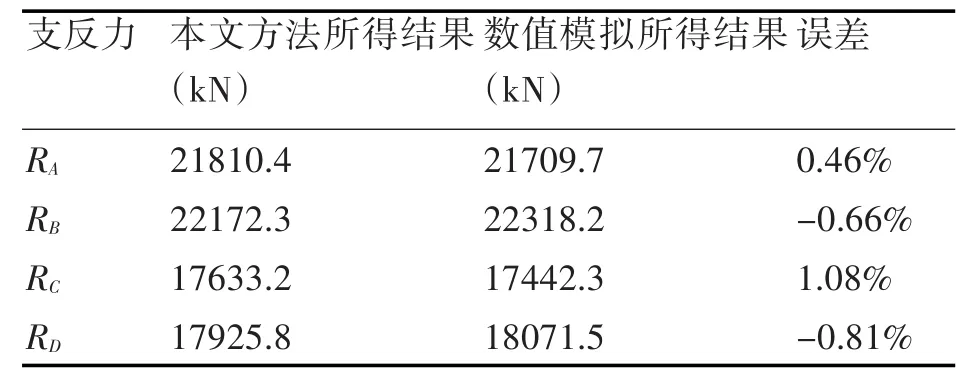
表2 載況1下兩種方法下支反力比較
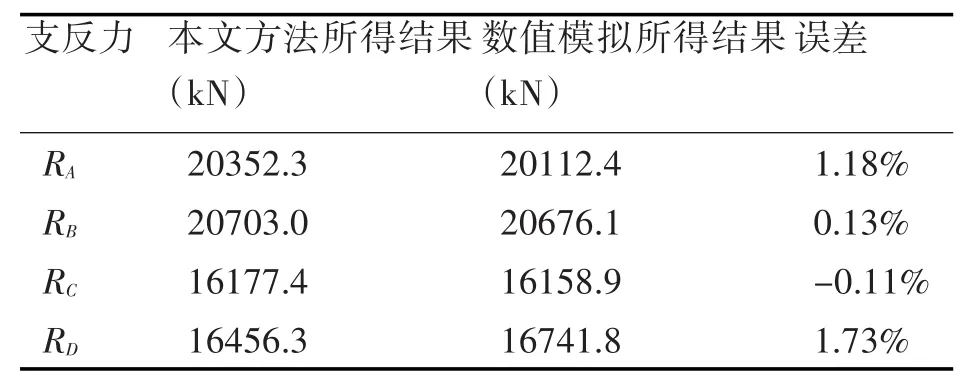
表3 載況2下兩種方法下支反力比較
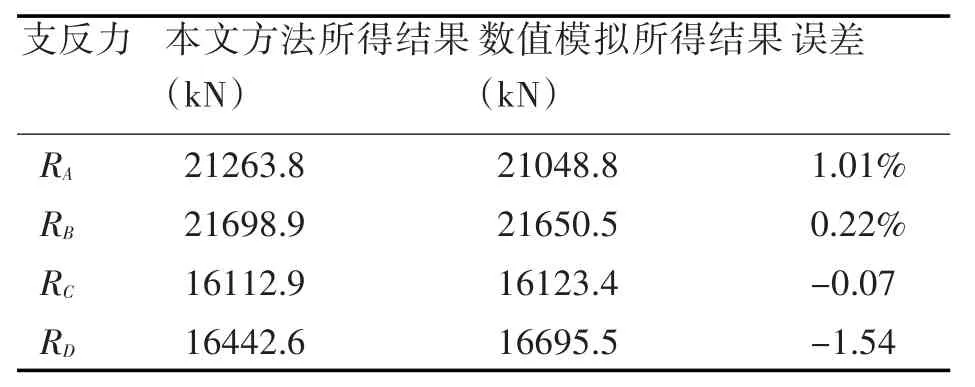
表4 載況3下兩種方法下支反力比較
由表2~表4可以看出,在三種載況下,采用本文所述方法與數(shù)值模擬法所得結(jié)果誤差很小,但這種新方法形式簡(jiǎn)單,計(jì)算方便,不用建立數(shù)值模型即可得到較為滿意的結(jié)果,可以節(jié)省大量時(shí)間,能夠?yàn)楣こ虒?shí)際提供快速、便捷的計(jì)算依據(jù),在海洋平臺(tái)的總體設(shè)計(jì)初期能夠廣泛使用,具有較強(qiáng)工程實(shí)際意義。
5 結(jié)語
通過本文的研究,得出了自升式平臺(tái)各樁腿支反力的計(jì)算方法,相比于常規(guī)方法,該方法形式簡(jiǎn)單,計(jì)算方便,可以節(jié)省時(shí)間,所得支反力可以用于評(píng)估在給定重量重心下的各樁腿支反力大小,能夠較快地得出各重量重心下的樁腿支反力約束。同時(shí),還可以利用該結(jié)果對(duì)地基承載力及插樁深度進(jìn)行初步核算,在海洋平臺(tái)的總體設(shè)計(jì)初期應(yīng)用廣泛。
海洋平臺(tái)主船體為空心薄壁結(jié)構(gòu),型深與型高差距較大,故認(rèn)為滿足薄板理論。由于沒有計(jì)入切應(yīng)力的影響,本文所得結(jié)果會(huì)和實(shí)際支反力有所偏差,但可以滿足工程需要。同時(shí),在使用支反力時(shí)會(huì)增加較大的余量,因此是偏安全的。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56