基于多傳感器融合的兩棲突擊車火力控制算法優化?
2019-03-01 09:09:40
艦船電子工程 2019年2期
(海軍陸戰隊訓練基地 廣州 510430)
1 引言
隨著高性能的兩棲突擊車列裝海軍陸戰部隊,對兩棲突擊車的火力攻擊的穩定性提出了更高的要求,兩棲突擊車的火力控制涉及到兩棲突擊車的車身調整控制、位姿參量控制、彈藥裝填控制、彈藥出管控制以及人機融合控制等各個方面,兩棲突擊車火力控制的優化設計能提高兩棲突擊車的生存能力和作戰能力,研究兩棲突擊車火力控制優化方法在海軍裝備革新和作戰效果優化中具有很好的應用價值,相關的控制算法研究受到人們的極大重視[1]。
兩棲突擊車的火力控制系統是一個非線性動力系統,控制算法的優化過程是對控制參量的優化調整和信息融合過程,采用傳感器進行兩棲突擊車的位姿參量、彈藥進出管參量以及攻擊相位角等參數的優化采集和信息融合處理[2],結合自適應控制算法實現火力控制系統的優化。典型的控制算法優化模糊PID算法、自適應誤差修正算法、非線性反演控制算法等[3~5],上述算法在進行兩棲突擊車的火力控制中存在非線性失真和模型參數不確定性等問題,導致控制過程的收斂性不好,全局不穩定性效果不佳。針對上述問題,本文提出一種基于多傳感器融合和微慣性彈藥出管調整的兩棲突擊車火力控制算法,采用陀螺儀測量儀等敏感傳感器元件進行兩棲突擊車火力攻擊姿態數據的信息采集,利用微慣性傳感系統讀取兩棲突擊車火力攻擊和兩棲突擊車的車身位姿數據,結合傳感器量化融合方法進行火力攻擊中的控制約束參量調節和自適應誤差補償,采用卡爾曼濾波處理處理方法進行火力控制中的參數穩定性調節,實現兩棲突擊車的火力控制算法優化設計,最后通過仿真實驗進行性能測試,展示了本文方法進行兩棲突擊車火力控制中的優越性能。
2 控制約束參量分析和控制對象描述
2.1 控制約束參量分析
為了實現對兩棲突擊車火力控制優化設計,采用傳感器、加速度計以及磁力計等敏感元件進行控制參數采集,采集的兩棲突擊車的火力控制約束參數有姿態信息、火力攻擊位姿信息、角度信息、出管彈藥量信息等,在姿態載體運動約束模型下,結合多傳感器量化融合和Kalman濾波方法[6],進行火力控制參量調節和信息融合處理,實現兩棲突擊車火力控制,得到兩棲突擊車火力控制的總體實現結構如圖1所示。
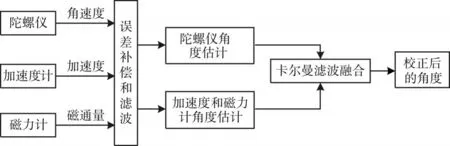
圖1 兩棲突擊車火力控制的總體實現結構圖
考慮由N個傳感器節點的構建的控制參數采集系統,采用多傳感器信息融合方法進行兩棲突擊車的火力控制優化,構建兩棲突擊車火力控制的模糊線性動態系統結構模型,采用相應的誤差融合方法,得到兩棲突擊車火力控制問題描述為

其中,x(k)∈Rn×1為兩棲突擊車的車位狀態,A(k)∈Rn×n為狀態轉移矩陣,兩棲突擊車火力控制的干擾項w(k)是均值為零且方差為Q(k)的高斯白噪聲,Γ(k)為表示傳感器數據的采樣矩陣。zi(k)∈Rp×1為第i個傳感器采集的兩棲突擊車火力控制的彈藥輸出測量值,Hi(k)∈Rp×n為相應的測量矩陣,火力控制的模糊約束參量ui(k)∈Rp×1是均值為零且方差為Di(k)的高斯白噪聲。結合模糊決策和自適應控制方法[7],對w(k)與ui(k)進行慣性誤差修正,得到兩棲突擊車火力控制的慣性調節函數為

在限定初始狀態下,得到誤差修正的測量函數x(0)均值為x0,方差為P0,將陀螺儀采集的原始數據進行Kalman濾波處理,得到輸出的測量參數獨立于w(k)和ui(k),i=1'2'…'N。當兩棲突擊車處于非加速運動狀態時,將加速度和磁力計采集的原始數據作為原始輸入參數,進行參量融合和跟蹤識別,提高控制輸出的穩定性。
2.2 控制對象分析及微慣性傳感調節
采用陀螺儀測量儀等敏感傳感器元件進行兩棲突擊車火力攻擊姿態數據的信息采集的基礎上,進行控制對象分析,利用微慣性傳感系統讀取兩棲突擊車火力攻擊和兩棲突擊車的車身位姿數據,使用小擾動理論進行分段控制[8],得到兩棲突擊車的火力系統傾斜操縱機構的控制系統函數描述為
上式中,Δi(k'r)表示k時刻第i個微慣性傳感器的測量值,采用增量調節方法,得到第r個分量的量化步長,r=1'2'…'p。在小擾動的前提下進行火力抖振的誤差補償和反饋調節[9],得到火力控制系統的反饋調節輸出為
考慮兩棲突擊車火力控制模型的非線性,得到火力控制系統微慣性傳感調節特性遞推公式計算:
結合傳感器量化融合方法進行火力攻擊中的控制約束參量調節和自適應誤差補償[10],結合模糊控制方法進行兩棲突擊車的火力控制律優化設計。
3 控制算法優化
在上述采用陀螺儀測量儀等敏感傳感器元件進行兩棲突擊車火力攻擊姿態數據的信息采集,利用微慣性傳感系統讀取兩棲突擊車火力攻擊和兩棲突擊車的車身位姿調節的基礎上,進行火力控制的優化設計。本文提出一種基于多傳感器融合和微慣性彈藥出管調整的兩棲突擊車火力控制算法,用卡爾曼濾波處理處理方法進行火力控制中的參數穩定性調節[11],得到火力控制的輸出穩態概率密度特征量P(k|k)的信息矩陣為

構建Lyapunov函數進行兩棲突擊車火力控制的出管誤差調節[12],采用反演積分補償方法,得到兩棲突擊車火力控制的慣性姿態參量融合信息矩陣為
設計自適應律,采用誤差反饋調節方法進行反演控制[13],得到兩棲突擊車火力控制輸出的模型參數為
結合信息狀態進行多傳感信息融合,根據信息融合結果,進行兩棲突擊車火力控制的過程優化,得到控制律:
其中,火力控制中的參數穩定性調節向量為

在兩棲突擊車處于多管火力攻擊狀態下,火力攻擊輸出的控制參數經閉環系統后的狀態矩陣滿足:
當姿態反饋校正時延τk大于一個采樣周期時,結合信息狀態向量估計值的,得到優化的控制律為
結合Lyapunov穩定性原理,得到本文設計的兩棲突擊車火力控制算法的穩定收斂的。
4 仿真實驗與結果分析
為驗證本文的算法在實現兩棲突擊車火力攻擊穩定性控制中的應用性能,進行仿真實驗,搭建硬件平臺包括三軸陀螺儀L3G4200D、三軸電子羅盤LSM303DLH以及兩棲突擊車火力集成系統AMS,控制算法采用Matlab 7設計,設置兩棲突擊車的火力控制傳感信息采樣周期為0.02s,自適應控制參量調節周期為0.50s,模糊控制的迭代步數分 別 設 定 為 μ=A 5000, μ=A 10000 μ=A 15000,擾動強度設定為-12dB,相關系數選取為 η12=0.6,η23=0.4,η13=0.2,根據上述仿真環境和參數設定,分別采用本文方法和傳統方法進行控制性能仿真測試,傳統方法分別為PID控制算法、反演控制算法和積分控制算法,分別記為A1,A2和A3,分別測試三種算法進行兩棲突擊車火力控制的速度和位置控制曲線如圖2所示。
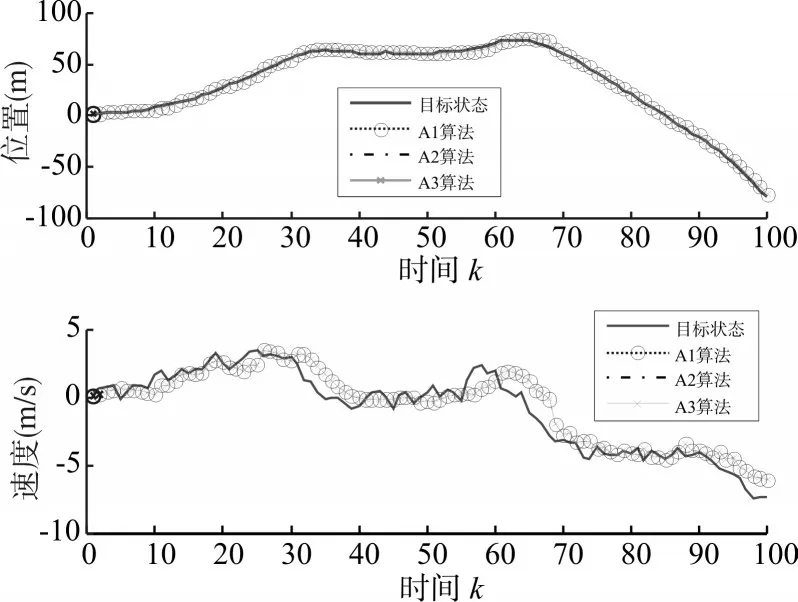
圖2 三種控制算法對兩棲突擊車火力控制位置和速度估計曲線
分析圖2得知,采用本文方法進行兩棲突擊車火力控制,對火力攻擊點的位置控制精度較好,對兩棲突擊車的自身速度和火力輸出速度的控制跟蹤性較好,提高對對敵目標的攻擊能力。進一步測試不同方法進行火力控制的誤差,得到對比結果如圖3所示。
分析圖3得知,本文方法進行兩棲突擊車火力控制,降低了攻擊誤差,提高了火力攻擊的準確性,在攻擊目標的初始狀態為下進一步測試火力控制性能,得到結果如圖4所示。
分析圖4得知,在目標位置突變的情況下,采用本文方法進行兩棲突擊車火力控制,能準確跟蹤目標位置和速度,提高了火力攻擊的準確性和穩定性,火力控制效能較好。
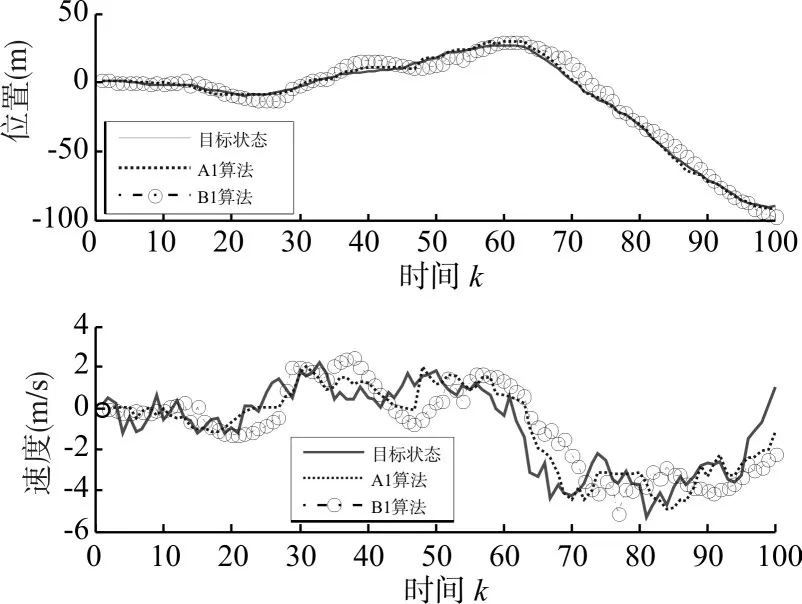
圖3 火力控制的誤差估計曲線
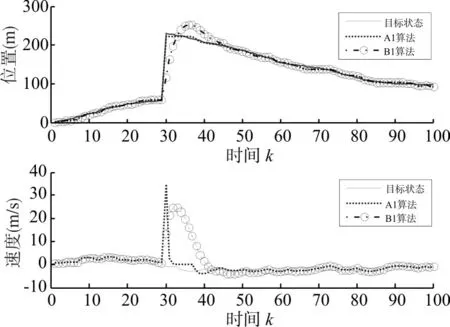
圖4 不同算法的控制性能估計曲線
5 結語
研究兩棲突擊車火力控制優化方法在海軍裝備革新和作戰效果優化中具有很好的應用價值,為了提高兩棲突擊車的火力攻擊穩定性,本文提出一種基于多傳感器融合和微慣性彈藥出管調整的兩棲突擊車火力控制算法。采用陀螺儀測量儀等敏感傳感器元件進行兩棲突擊車火力攻擊姿態數據的信息采集,利用微慣性傳感系統讀取兩棲突擊車火力攻擊和兩棲突擊車的車身位姿數據,結合傳感器量化融合方法進行火力攻擊中的控制約束參量調節和自適應誤差補償,采用卡爾曼濾波處理方法進行火力控制中的參數穩定性調節,實現控制算法優化設計。研究表明,采用該方法進行兩棲突擊車火力控制的穩定性較好,兩棲突擊車的位姿調節能力較強,輸出參量誤差較小,對目標的火力攻擊準確性較好,提高火力控制的品質。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
