面向駕駛意圖識(shí)別的駕駛員頭、面部視覺特征提取*
2019-03-04 03:26:18張立軍唐鑫孟德建
汽車技術(shù) 2019年2期
張立軍 唐鑫 孟德建
(同濟(jì)大學(xué),上海 201804)
主題詞:駕駛意圖 機(jī)器視覺 特征提取 關(guān)聯(lián)性
1 前言
在“人-車-路”系統(tǒng)中,駕駛員是重要的參與者,其駕駛意圖和表現(xiàn)出的駕駛行為對(duì)整個(gè)系統(tǒng)的安全性具有至關(guān)重要的影響。統(tǒng)計(jì)表明,接近90%的道路交通安全事故都是由駕駛員直接或間接導(dǎo)致的[1]。戴姆勒公司認(rèn)為,提前0.5 s對(duì)駕駛員的危險(xiǎn)行為進(jìn)行示警可消除60%的追尾事故,提前1 s示警可消除90%的追尾事故[2]。因此,駕駛意圖的識(shí)別可用于碰撞預(yù)警,有效改善道路安全性。
駕駛行為是駕駛意圖的外在表現(xiàn),汽車安全領(lǐng)域越來越多的學(xué)者希望通過識(shí)別駕駛員的駕駛意圖對(duì)其駕駛行為進(jìn)行早期預(yù)測(cè)。在駕駛意圖產(chǎn)生階段,其主要表征是頭部和眼部運(yùn)動(dòng)狀態(tài)的變化。為了進(jìn)行駕駛意圖的識(shí)別,需要提取眼部和頭部的運(yùn)動(dòng)狀態(tài)和特征。目前,基于駕駛員頭、面部視覺特征的駕駛意圖識(shí)別主要基于視覺特征,包括后視鏡注視時(shí)間、掃視持續(xù)時(shí)間、頭部水平和垂直轉(zhuǎn)角標(biāo)準(zhǔn)差等,所采用的方法主要是利用秩檢驗(yàn)等統(tǒng)計(jì)學(xué)檢驗(yàn)方法分析不同駕駛意圖下的視覺特征是否存在差異性,若差異性滿足閾值即認(rèn)為特征與意圖有較強(qiáng)的關(guān)聯(lián)關(guān)系,可以用于識(shí)別駕駛意圖[3-4]。但是,當(dāng)前研究對(duì)機(jī)器視覺特征的提取主要基于眼動(dòng)儀,成本高,難以商業(yè)化。用于駕駛意圖識(shí)別的特征選擇主要依賴于主觀判斷,缺乏科學(xué)系統(tǒng)的依據(jù)。
在此背景下,本文進(jìn)行了自然駕駛整車道路試驗(yàn),開發(fā)了基于機(jī)器視覺的視線方向及頭部姿態(tài)估計(jì)算法,并利用眼動(dòng)儀驗(yàn)證了其有效性,構(gòu)建了包含駕駛員頭、面部視覺和運(yùn)動(dòng)特征以及駕駛員行為/意圖的數(shù)據(jù)集,并使用T檢驗(yàn)方法分析了頭、面部機(jī)器視覺特征與駕駛意圖的關(guān)聯(lián)性,可為駕駛意圖識(shí)別的特征選擇提供科學(xué)依據(jù)。
2 自然駕駛整車道路試驗(yàn)
2.1 試驗(yàn)設(shè)計(jì)
2.1.1 試驗(yàn)平臺(tái)搭建
基于試驗(yàn)車輛、Smart Eye眼動(dòng)儀、測(cè)力轉(zhuǎn)向盤、場(chǎng)景攝像頭等搭建的自然駕駛整車道路試驗(yàn)平臺(tái)及各儀器的連接關(guān)系如圖1所示,試驗(yàn)儀器的規(guī)格如表1所示。其中,Smart Eye眼動(dòng)儀主要由3個(gè)視線追蹤攝像頭、采集卡和主機(jī)組成。攝像頭1與攝像頭3固連有近紅外光源,以提供穩(wěn)定照明,同時(shí),紅外光源在眼睛中反射的耀點(diǎn)可以作為定位的參考點(diǎn)。采集卡用于攝像頭及紅外光源的供電和同步開閉。主機(jī)用于眼動(dòng)儀采樣頻率、坐標(biāo)定義等參數(shù)設(shè)置,及導(dǎo)出攝像頭采集的視頻。
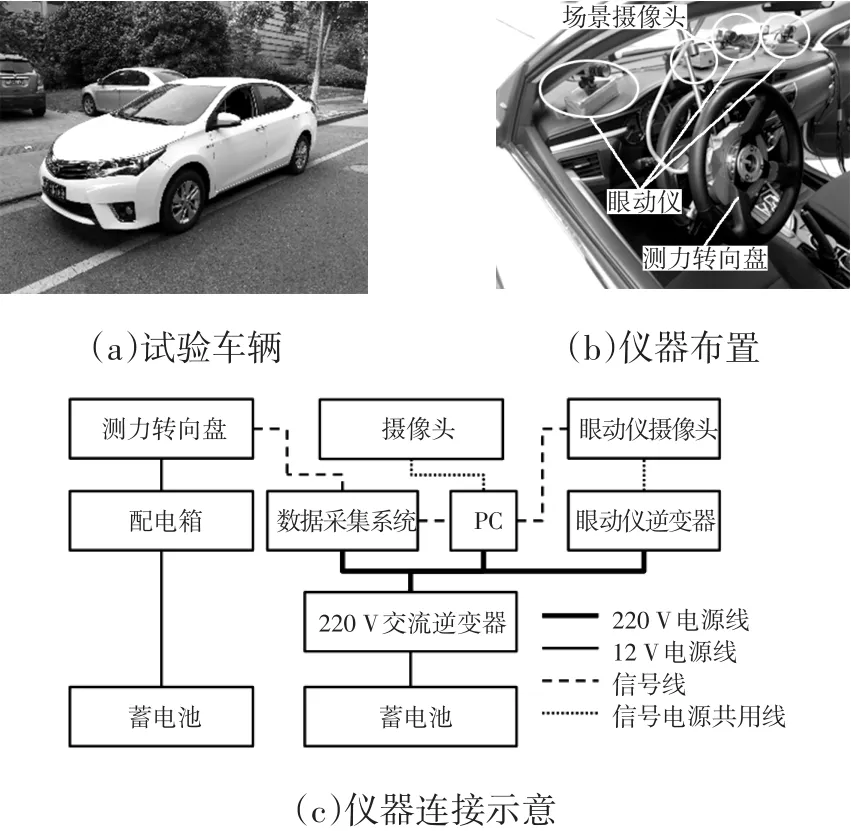
圖1 試驗(yàn)平臺(tái)
表1 道路試驗(yàn)設(shè)備
該平臺(tái)有3個(gè)功能:
a.利用眼動(dòng)儀攝像頭采集駕駛員駕駛過程視頻圖像,利用開發(fā)的視覺算法計(jì)算駕駛員眼部及頭部的運(yùn)動(dòng)狀態(tài)數(shù)據(jù);同時(shí),眼動(dòng)儀內(nèi)置算法也可直接導(dǎo)出駕駛員眼部、頭部運(yùn)動(dòng)狀態(tài),作為真值驗(yàn)證視覺算法。
b.場(chǎng)景攝像頭采集駕駛過程中車外環(huán)境信息,判斷工況類別(左、右轉(zhuǎn)彎/直行)。
c.利用轉(zhuǎn)向盤力角測(cè)量?jī)x采集試驗(yàn)過程中車輛的轉(zhuǎn)向盤轉(zhuǎn)角信號(hào),作為判斷駕駛意圖產(chǎn)生的起始和終止時(shí)間的依據(jù)。
如圖2所示,在左、右后視鏡及前風(fēng)窗玻璃的邊緣布置標(biāo)定點(diǎn),用于后續(xù)標(biāo)定確定各區(qū)域邊界。
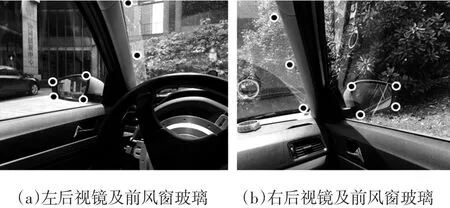
圖2 標(biāo)定點(diǎn)
2.1.2 試驗(yàn)路段及試驗(yàn)人員
分別在上海市嘉定區(qū)的開放道路和半封閉道路進(jìn)行了試驗(yàn)。社會(huì)開放道路全程約38 km,包含城市道路、高速路、高架路等路段;半封閉道路為校園道路。本次試驗(yàn)共招募7位駕駛員,年齡22~43歲不等,駕齡均在3年以上,無散光。試驗(yàn)前24 h內(nèi)保持充足睡眠,避免用眼過度,以保持較好的駕駛狀態(tài)。
2.2 駕駛意圖數(shù)據(jù)集獲取
對(duì)于采集到的整段數(shù)據(jù),通過觀察場(chǎng)景視頻推斷出車輛及駕駛員行為,粗選出左換道、右換道與直行樣本片段。在粗選時(shí),保留換道前轉(zhuǎn)向盤轉(zhuǎn)角變化較小的一段數(shù)據(jù)。按照各粗選樣本的轉(zhuǎn)向盤轉(zhuǎn)角信號(hào)對(duì)其進(jìn)行精選。如圖3所示,計(jì)算平直段的轉(zhuǎn)向盤轉(zhuǎn)角均值與標(biāo)準(zhǔn)差σ,根據(jù)拉依達(dá)準(zhǔn)則,滿足|θt-|>3σ的測(cè)定轉(zhuǎn)角θt對(duì)應(yīng)的起始時(shí)刻t即為換道行為的起點(diǎn)時(shí)刻,也是換道意圖的終點(diǎn)時(shí)刻。以2 s為意圖時(shí)窗大小,即認(rèn)為轉(zhuǎn)向盤開始大范圍轉(zhuǎn)動(dòng)時(shí)刻為駕駛意圖終點(diǎn),該時(shí)刻前2 s為產(chǎn)生駕駛意圖的起點(diǎn)[4-6]。對(duì)于直行片段來說,駕駛員沒有明顯的行為特征,且直行行為一般會(huì)持續(xù)一段時(shí)間,因此可根據(jù)場(chǎng)景攝像頭中的車輛行為及轉(zhuǎn)向盤轉(zhuǎn)角信號(hào),按照與左、右換道相同的時(shí)窗選取一段直行數(shù)據(jù)。
按照上述原則截取意圖階段樣本數(shù)據(jù),最終獲得470組樣本,其中左換道117組,右換道179組,直行174組。
3 視線方向及頭部姿態(tài)估計(jì)算法開發(fā)
駕駛意圖產(chǎn)生階段的主要表征是頭部和眼部運(yùn)動(dòng)狀態(tài)的變化。為了進(jìn)行駕駛意圖識(shí)別,需要提取眼部和頭部的運(yùn)動(dòng)狀態(tài)。基于機(jī)器視覺的運(yùn)動(dòng)狀態(tài)估計(jì)方法設(shè)備簡(jiǎn)單、成本低、精度高且對(duì)駕駛員的干擾小,因此最適合用于研究駕駛員的行為。開發(fā)的視覺算法技術(shù)路線如圖4所示。
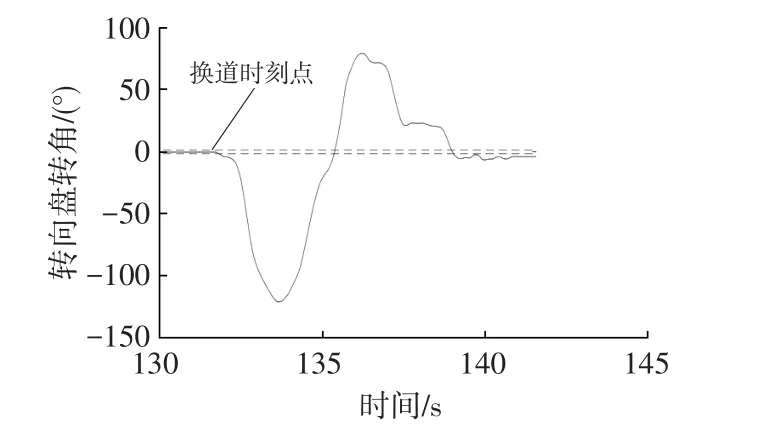
圖3 轉(zhuǎn)向盤轉(zhuǎn)角信號(hào)
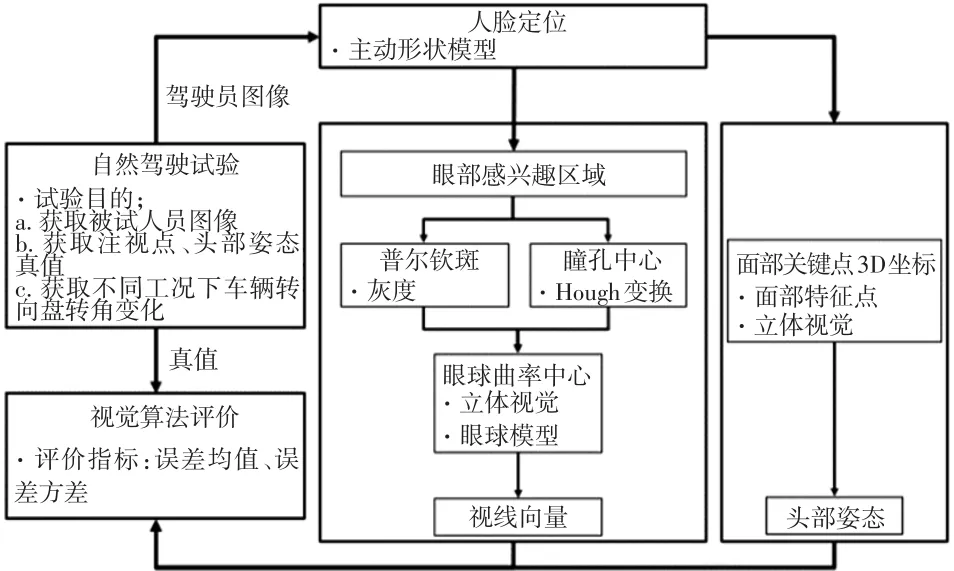
圖4 視線方向及頭部姿態(tài)估計(jì)算法技術(shù)路線
3.1 人臉特征點(diǎn)定位
利用主動(dòng)形狀模型(Active Shape Model,ASM)算法[7]進(jìn)行人臉特征點(diǎn)定位。ASM算法包括模型訓(xùn)練和搜索兩個(gè)階段。在模型訓(xùn)練階段,首先建立由若干個(gè)面部特征點(diǎn)坐標(biāo)組成的形狀向量作為面部的整體形狀模型,然后建立形狀向量中每個(gè)特征點(diǎn)的局部特征,用于調(diào)整整體形狀模型的位置,使模型更加貼合面部。訓(xùn)練完成后得到總體形狀模型和各點(diǎn)局部特征,就可以進(jìn)行模型搜索,完成定位。
如圖5所示為某正面人臉定位到的68個(gè)特征點(diǎn),各特征點(diǎn)與面部較為貼合,可以認(rèn)為算法有效。

圖5 人臉特征點(diǎn)定位結(jié)果
3.2 視線方向估計(jì)
3.2.1 瞳孔中心與普爾欽斑定位
在人臉特征點(diǎn)定位基礎(chǔ)上,提取眼部感興趣區(qū)域如圖6a所示。可以看到瞳孔部位的灰度值與周圍區(qū)域差別較大,為了準(zhǔn)確找出瞳孔與周圍區(qū)域的分界線,使用Canny算子[8]進(jìn)行邊緣檢測(cè),如圖6b、圖6d~圖6h所示。結(jié)合瞳孔邊緣的形狀特點(diǎn),使用霍夫變換[9]檢測(cè)瞳孔。為了減小霍夫空間的維數(shù),使用改進(jìn)的2-1霍夫變換[10],即把霍夫變換分為2個(gè)階段:檢測(cè)圖像中可能存在的圓心;根據(jù)找到的圓心計(jì)算圓的半徑。瞳孔中心檢測(cè)結(jié)果如圖6i所示。
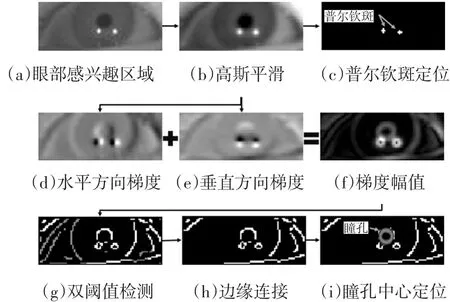
圖6 瞳孔中心和普爾欽斑定位
普爾欽斑是近紅外光在用戶角膜上產(chǎn)生的高亮度反射點(diǎn),如圖6a所示,其亮度明顯高于眼睛其他區(qū)域,故可以根據(jù)灰度值定位普爾欽斑。選擇合理的閾值,將眼部圖像二值化,普爾欽斑被較為準(zhǔn)確清晰地提取出來。同時(shí),由于人的眼球是濕潤(rùn)的球體,在轉(zhuǎn)動(dòng)時(shí),眼部其他區(qū)域可能同樣產(chǎn)生反光點(diǎn),為了保證算法在復(fù)雜環(huán)境下的魯棒性,防止其他高亮度反光點(diǎn)的干擾,選擇離瞳孔中心最近的兩個(gè)普爾欽斑作為候選位置。最終,提取到的普爾欽斑如圖6c所示。
3.2.2 基于立體視覺的視線方向估計(jì)
為了計(jì)算駕駛員的三維視線,需要知道瞳孔中心及普爾欽斑的三維坐標(biāo),該問題可以基于立體視覺計(jì)算:以空間中某個(gè)待求的點(diǎn)P(Xw,Yw,Zw)為例,假設(shè)該點(diǎn)在2個(gè)相機(jī)中分別成像P1(u1,v1)和P2(u2,v2),并已知2個(gè)相機(jī)的投影矩陣為M1、M2,為3×4矩陣。根據(jù)相機(jī)的成像公式有:

式中,zc1和zc2為2個(gè)相機(jī)坐標(biāo)系下點(diǎn)P的z坐標(biāo)。
聯(lián)立式(1)和式(2)可消去zc1和zc2,利用最小二乘法求解得到P點(diǎn)坐標(biāo)(Xw,Yw,Zw)。
獲得瞳孔中心及2個(gè)普爾欽斑的三維坐標(biāo)后,利用圖7所示的眼球模型估計(jì)視線方向,其中O為角膜球面中心,P0為瞳孔虛像,為真實(shí)瞳孔,C1和C2為紅外光源所在點(diǎn),P1和P2為紅外光源的虛像,即普爾欽斑。
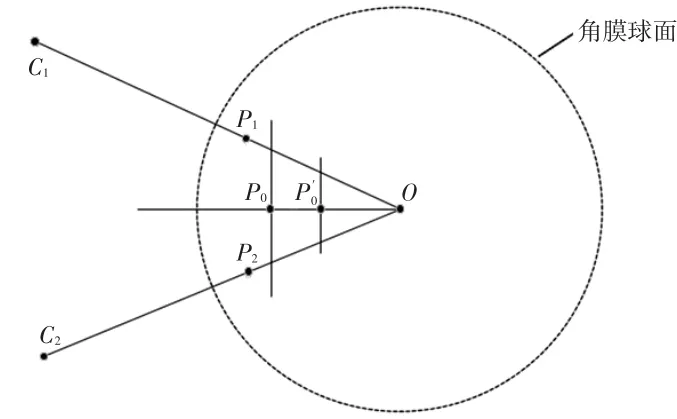
圖7 眼球模型
O的位置可以通過求解直線C1P1與C2P2的交點(diǎn)得到,O與的連線即為視線方向。但是實(shí)際上是不可知的,而根據(jù)球面反射原理,瞳孔和折射產(chǎn)生的虛像在同一半徑方向上,即和P0都在眼睛光軸上。因此可以使用OP0代替[11-12]。理論上C1P1和C2P2相交于O,但是在實(shí)際求解中,由于誤差的存在,兩條空間直線不會(huì)恰好相交。因此,這里計(jì)算兩條空間直線的公垂線,將公垂線的中點(diǎn)作為點(diǎn)O。結(jié)合已求得的P0,向量OP0即為視線方向。
3.3 頭部姿態(tài)估計(jì)
使用比例正交投影迭代變換算法(Pose from Or?thography and Scaling with Iteration,POSIT)求解頭部的俯仰、橫擺和側(cè)傾角度,即頭部姿態(tài)。該算法一般用來估計(jì)空間中物體的姿態(tài),輸入是物體上至少4個(gè)點(diǎn)的三維坐標(biāo)以及這些點(diǎn)在圖像上的對(duì)應(yīng)位置,輸出是待求物體的旋轉(zhuǎn)和平移矩陣[13]。其核心思想為:對(duì)待求的物體,使用弱透視投影模型代替透視投影模型,求解弱透視投影模型所產(chǎn)生的方程組,得出待求物體的旋轉(zhuǎn)和平移矩陣,以此作為初值。然后使用該初值更新弱透視投影模型,該模型相對(duì)于前述弱透視模型更加逼近透視模型,對(duì)其進(jìn)行求解得到新的估計(jì)值。不斷迭代直至估計(jì)值的變化小于閾值。
如圖8所示,攝像機(jī)坐標(biāo)系的原點(diǎn)在攝像機(jī)的光心Q,坐標(biāo)系的XC軸和YC軸分別與圖像物理坐標(biāo)系的兩軸平行,坐標(biāo)系的軸ZC是攝像機(jī)的光軸,各軸的單位方向向量分別為i、j、k。攝像機(jī)的成像平面為G,光心距離為f。假設(shè)已知待檢測(cè)物體上若干點(diǎn)M0,M1,…,Mn-1的三維坐標(biāo),在物體上以M0為原點(diǎn)建立物體局部坐標(biāo)系。則要求取的問題轉(zhuǎn)換為求解該局部坐標(biāo)系和攝像機(jī)坐標(biāo)系之間的平移和旋轉(zhuǎn)矩陣。求解過程具體的算法流程如圖9所示,其中n為迭代次數(shù),εk(n)為第n次迭代的估計(jì)值,xk、yk為特征點(diǎn)Mk透視投影的像點(diǎn)坐標(biāo),x0、y0為特征點(diǎn)M0透視投影的像點(diǎn)坐標(biāo),x′、y′為特征點(diǎn)Mk弱透視投影的像點(diǎn)坐標(biāo),Z0為M0的ZC軸坐標(biāo)。
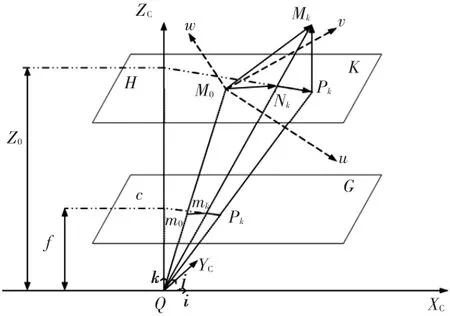
圖8 POSIT算法
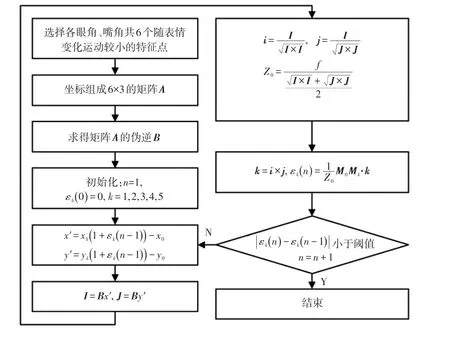
圖9 POSIT算法流程
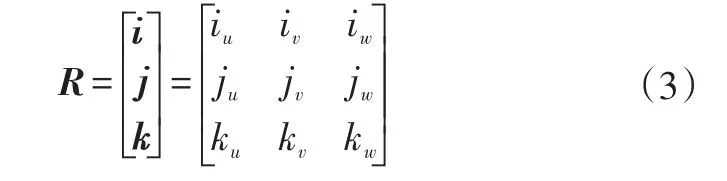
計(jì)算得到旋轉(zhuǎn)矩陣R的3個(gè)分量i、j、k:
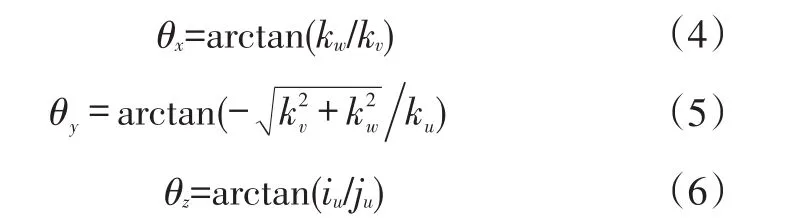
根據(jù)旋轉(zhuǎn)矩陣可以求出頭部繞3個(gè)坐標(biāo)軸旋轉(zhuǎn)的角度:
3.4 算法評(píng)價(jià)
為了保證視覺算法能夠有效提取自然駕駛試驗(yàn)中駕駛員的視線方向與頭部姿態(tài),需要進(jìn)行算法有效性驗(yàn)證。
對(duì)視線方向估計(jì)的精度進(jìn)行評(píng)價(jià)時(shí),由于視線方向是由3個(gè)分量組成的單位向量,為了方便比較誤差,將各視線向量轉(zhuǎn)化為水平和垂直方向角:
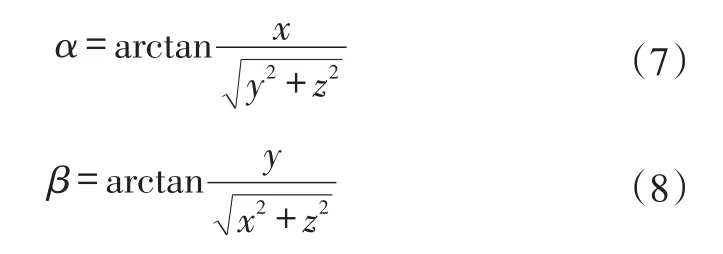
式中,x、y、z分別為視線向量的3個(gè)分量;α為水平方向角;β為垂直方向角。
將眼動(dòng)儀采集到的視線方向作為真值,基于視覺算法估計(jì)得到的視線方向作為估計(jì)值,分別繪制水平視角與垂直視角隨時(shí)間變化的曲線,如圖10所示。由圖10可見,估計(jì)視角與真實(shí)視角基本重合,可以體現(xiàn)被試人員的運(yùn)動(dòng)規(guī)律。同樣繪制頭部姿態(tài)俯仰角、側(cè)傾角和橫擺角3個(gè)分量的估計(jì)值與真值隨時(shí)間的變化曲線,如圖11所示。
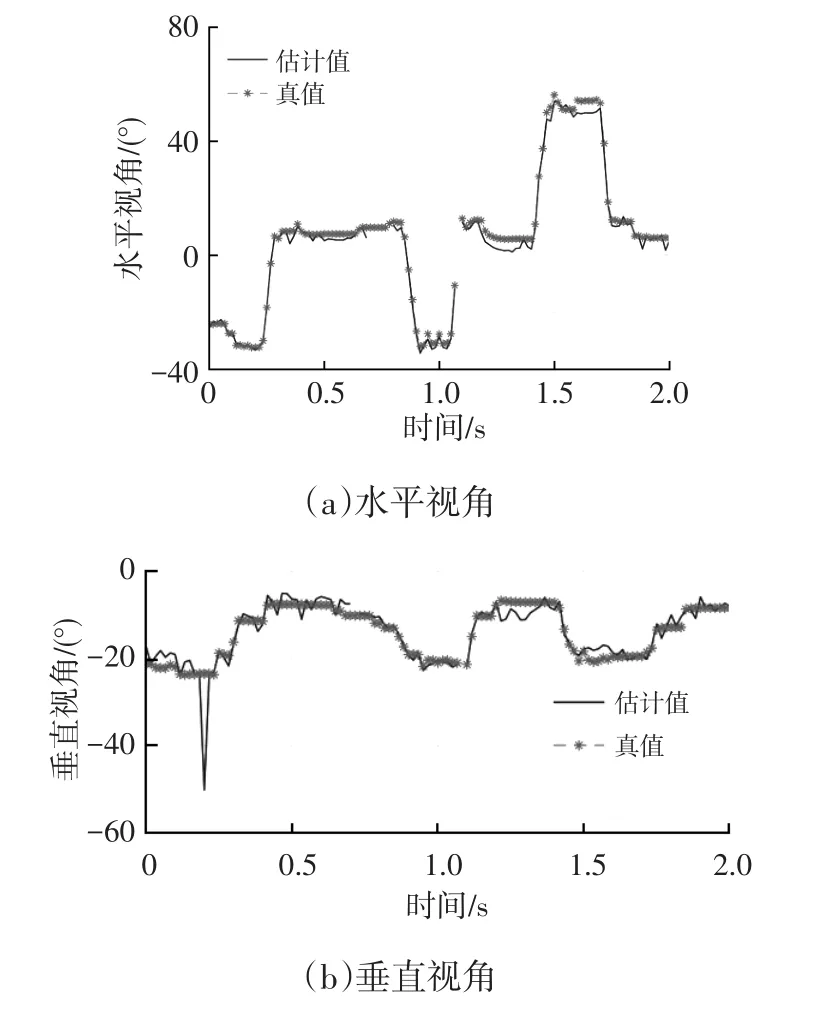
圖10 視線方向估計(jì)值與真值
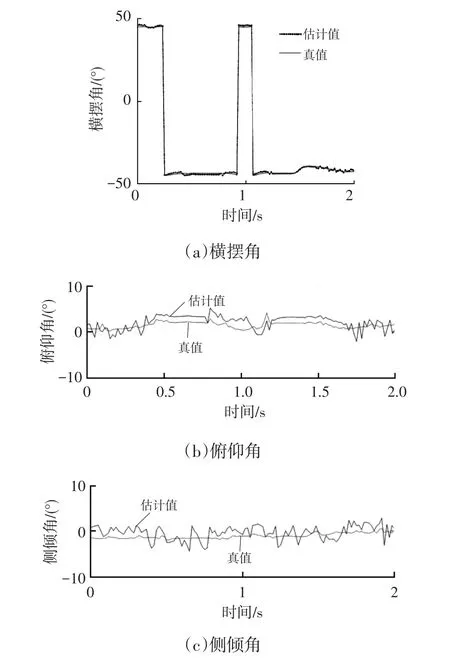
圖11 頭部姿態(tài)角估計(jì)值與真值
計(jì)算視線方向估計(jì)、頭部姿態(tài)角估計(jì)的誤差均值與方差,如表2所示,估計(jì)值相對(duì)于真值的誤差較小,驗(yàn)證了算法的有效性。
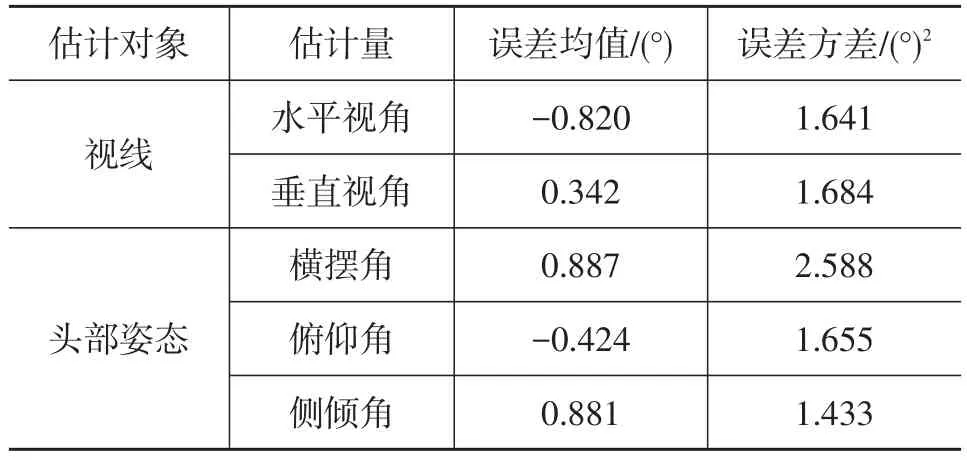
表2 視線及頭部姿態(tài)估計(jì)誤差
4 頭、面部機(jī)器視覺特征提取
4.1 數(shù)據(jù)清洗
由于圖像采集以及處理過程中會(huì)存在誤差,基于視覺算法提取后的數(shù)據(jù)中依然可能存在“臟數(shù)據(jù)”。如果在分析時(shí)不加選擇地使用這些數(shù)據(jù),可能會(huì)產(chǎn)生錯(cuò)誤的分析結(jié)果,因此需要清洗數(shù)據(jù)以便后續(xù)分析。
4.1.1 異常數(shù)據(jù)剔除
試驗(yàn)中眼動(dòng)儀攝像頭通過膠接固定在攝像頭上,行駛過程中的車輛振動(dòng)以及駕駛員異常操作都可能引起拍攝圖像異常,需要對(duì)這些異常值進(jìn)行剔除。根據(jù)拉依達(dá)準(zhǔn)則,將樣本中與平均值的偏差超過3倍標(biāo)準(zhǔn)差的測(cè)定值視為高度異常值,予以剔除。剔除前后的視線方向如圖12a所示,對(duì)比可見,通過異常值剔除,消除了明顯離群的視點(diǎn)。
4.1.2 缺失值填充
在圖像采集過程中,某些姿態(tài)下面部特征點(diǎn)不可見;此外,當(dāng)檢測(cè)不到駕駛員或駕駛員眼睛閉合,無法計(jì)算視線方向時(shí),視線方向的3個(gè)分量都將置為0,從而產(chǎn)生缺失值。為了恢復(fù)這部分?jǐn)?shù)據(jù),需要對(duì)數(shù)據(jù)中的缺失值進(jìn)行填充。考慮到人運(yùn)動(dòng)的連續(xù)性,對(duì)于缺失值前、后2幀的值求均值,作為該幀的值。圖12b以水平視角為例,展示了缺失值填充后的圖像,補(bǔ)充了曲線缺失的部分,填充后的曲線較為完整。
4.1.3 濾波
缺失值填充后的各運(yùn)動(dòng)狀態(tài)均值與真值較為接近,但是還存在一些高頻噪聲干擾。由于后續(xù)還要通過差分計(jì)算各運(yùn)動(dòng)的速度與加速度,為了減小這些衍生量的誤差,需對(duì)得到的數(shù)據(jù)進(jìn)行濾波,這里選擇中值濾波對(duì)數(shù)據(jù)進(jìn)行處理。仍以水平視角為例,濾波前、后的曲線如圖12c所示,高頻噪聲被明顯減小。
4.2 運(yùn)動(dòng)特征提取
對(duì)清洗后的數(shù)據(jù)提取眼部水平、垂直運(yùn)動(dòng)特征和頭部俯仰、橫擺、側(cè)傾運(yùn)動(dòng)特征。對(duì)于眼部運(yùn)動(dòng)特征,提取清洗后的水平和垂直視角,結(jié)合幀率進(jìn)行差分,獲得水平運(yùn)動(dòng)速度和垂直運(yùn)動(dòng)速度,對(duì)運(yùn)動(dòng)速度再進(jìn)行差分即為運(yùn)動(dòng)加速度。對(duì)于每個(gè)意圖片段均得出其角度、速度及加速度變化的數(shù)據(jù),然后分別統(tǒng)計(jì)最大值、最小值、算術(shù)平均值、幾何平均值、調(diào)和平均值、截尾平均值、中位數(shù)、下四分位數(shù)、上四分位數(shù)、極差、標(biāo)準(zhǔn)差、變異系數(shù)、偏度和峰度等14項(xiàng)常用統(tǒng)計(jì)特征。頭部運(yùn)動(dòng)特征的提取方法與眼部運(yùn)動(dòng)特征的提取較為類似,同樣統(tǒng)計(jì)上述14項(xiàng)統(tǒng)計(jì)特征。
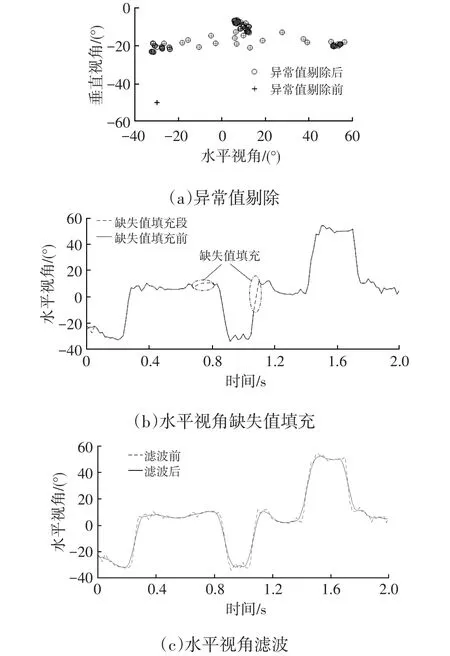
圖12 數(shù)據(jù)清洗
4.3 注視與掃視特征提取
4.3.1 視野平面劃分
試驗(yàn)前需進(jìn)行標(biāo)定,使用開發(fā)的立體視覺視線估計(jì)算法獲取各標(biāo)定點(diǎn)坐標(biāo),然后使用式(7)、式(8)將注視向量轉(zhuǎn)化為水平和垂直方向角,以這些標(biāo)定點(diǎn)的方向角作為各視野區(qū)域的邊界。將各視野區(qū)域邊界與視線方向角疊加到同一圖中,如圖13所示。
4.3.2 注視與掃視區(qū)分
駕駛員在觀察環(huán)境時(shí),有3種基本的眼部運(yùn)動(dòng):注視、掃視和眨眼。注視是視線對(duì)準(zhǔn)某一區(qū)域并保持相對(duì)靜止的運(yùn)動(dòng),通過注視提取環(huán)境中的關(guān)鍵信息。掃視發(fā)生于駕駛員對(duì)行車過程中的感興趣目標(biāo)的搜索過程或切換不同注視目標(biāo)時(shí)。眨眼是一種不自主運(yùn)動(dòng),在駕駛過程中與環(huán)境信息的獲取和處理無關(guān)。本文只研究注視和掃視這兩種基本眼動(dòng)形式。
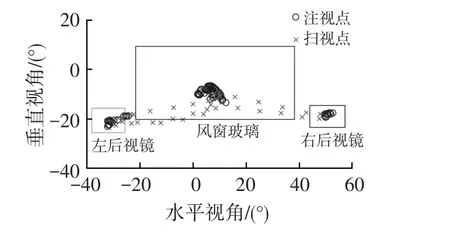
圖13 視野平面劃分及注視、掃視區(qū)分
以眼球運(yùn)動(dòng)狀態(tài)作為注視和掃視的劃分依據(jù),將眼動(dòng)速度的閾值設(shè)置為100°/s[14-16],即眼動(dòng)速度小于100°/s則認(rèn)為是注視行為。如圖13所示,注視點(diǎn)大部分集中在前風(fēng)窗玻璃中央、左、右后視鏡和組合儀表等需要駕駛員視線稍作停留以提取信息的位置,而掃視點(diǎn)大部分在各注視區(qū)域之間,這也比較符合實(shí)際駕駛行為。根據(jù)視點(diǎn)類型與幀率進(jìn)行計(jì)算,提取各區(qū)域的注視次數(shù)、注視時(shí)間、掃視次數(shù)、平均掃視時(shí)間、平均掃視角度和平均掃視速度等特征。
5 視覺特征與駕駛意圖的關(guān)聯(lián)性分析
為了研究視覺特征與駕駛意圖之間的關(guān)聯(lián)性,需要分析不同駕駛意圖下的視覺特征是否存在差異性,若差異性滿足閾值即認(rèn)為特征與意圖有較強(qiáng)關(guān)聯(lián)關(guān)系,可以用于識(shí)別駕駛意圖。
箱線圖是利用數(shù)據(jù)中的最大值、上四分位數(shù)、中位數(shù)、下四分位數(shù)與最小值來描述數(shù)據(jù)的一種方法,可以直觀地表示差異性。以總注視次數(shù)為例,用箱線圖表示其在左換道、右換道和直行情況下的數(shù)據(jù)分布,如圖14所示,可以看出在不同駕駛意圖下,總注視次數(shù)的分布雖然存在略微差異,但大體相同。
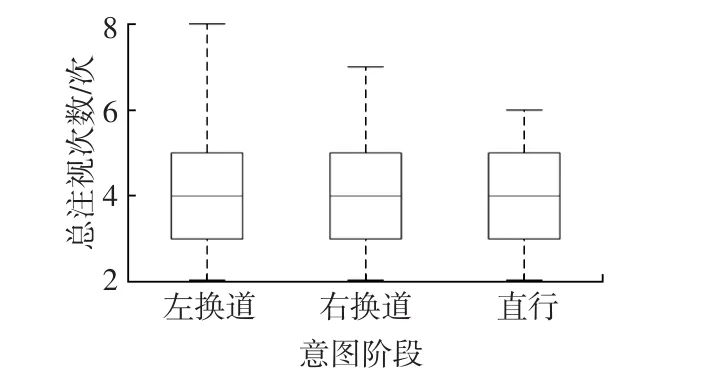
圖14 總注視次數(shù)箱線圖
對(duì)于差異性較小的樣本,箱線圖很難直觀地判斷樣本是否存在差異性,這里使用獨(dú)立樣本T檢驗(yàn)計(jì)算不同駕駛意圖樣本兩兩之間的差異性水平,如果差異性均小于閾值,則認(rèn)為該特征與駕駛意圖存在關(guān)聯(lián)關(guān)系。計(jì)算不同駕駛意圖下總注視次數(shù)的差異性:左換道-右換道、左換道-直行、右換道-直行之間的T檢驗(yàn)結(jié)果分別是0.847、0.787、0.904。根據(jù)經(jīng)驗(yàn)值選擇差異性水平閾值0.05,可以看出各特征間的差異性水平均大于閾值,即不同駕駛意圖間總注視次數(shù)的分布不具有差異性,因此總注視次數(shù)這一特征與駕駛意圖沒有關(guān)聯(lián)關(guān)系。
采用相同的方法分析4.2和4.3節(jié)中提取的各個(gè)特征在不同駕駛意圖下的差異性。結(jié)果表明:
a. 駕駛員注視特征中左、右后視鏡注視次數(shù)、注視時(shí)間與駕駛意圖有關(guān)聯(lián)關(guān)系,掃視特征中平均掃視時(shí)間、平均掃視角度、平均掃視速度與駕駛意圖有關(guān)聯(lián)關(guān)系。
b.駕駛員眼部運(yùn)動(dòng)特征中,水平運(yùn)動(dòng)的部分特征與駕駛意圖有關(guān)聯(lián)關(guān)系,而垂直運(yùn)動(dòng)特征與駕駛意圖沒有關(guān)聯(lián)關(guān)系;駕駛員頭部運(yùn)動(dòng)特征中,橫擺、側(cè)傾運(yùn)動(dòng)的部分特征與駕駛意圖有關(guān)聯(lián)關(guān)系,而俯仰運(yùn)動(dòng)特征與駕駛意圖沒有關(guān)聯(lián)關(guān)系。具體結(jié)果如表3所示。
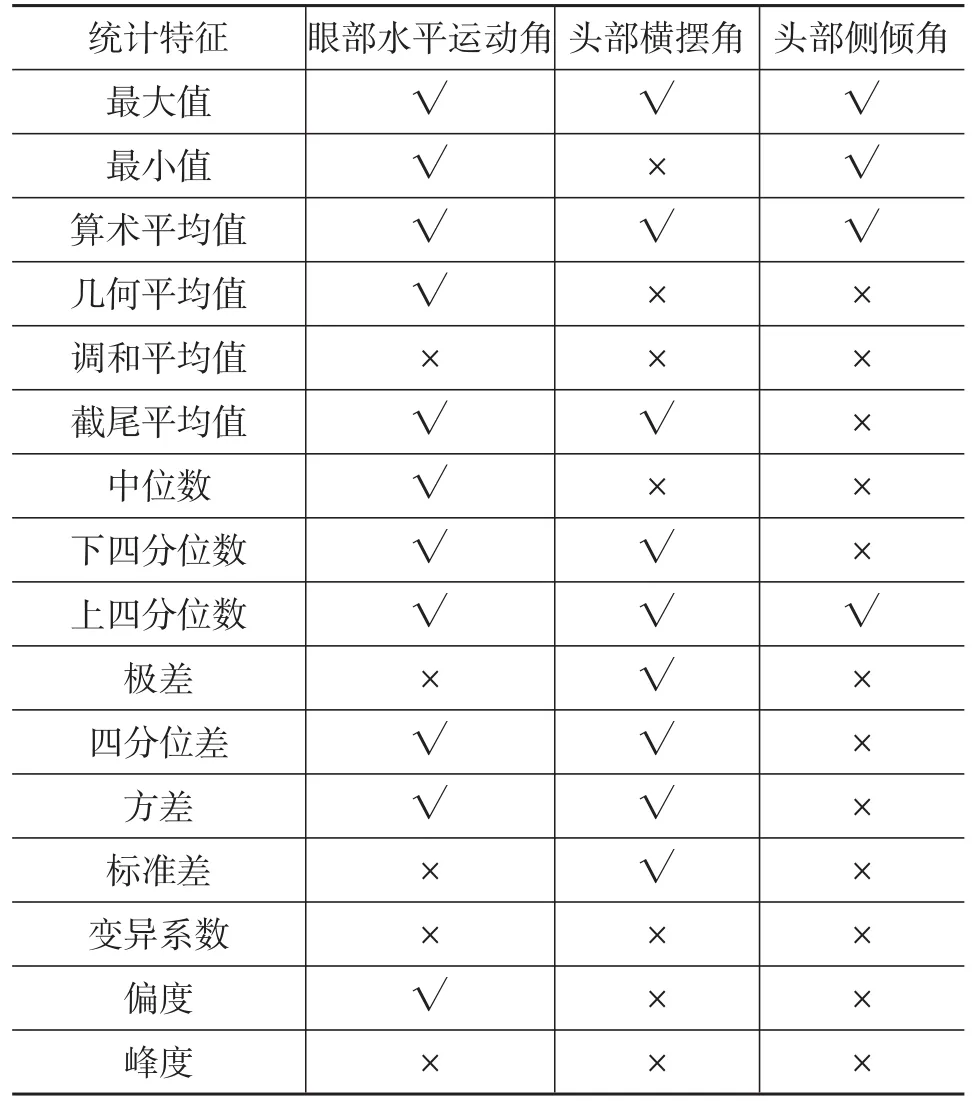
表3 眼部、頭部運(yùn)動(dòng)特征與駕駛意圖的關(guān)聯(lián)性
6 結(jié)束語
本文基于自然駕駛試驗(yàn)采集到的場(chǎng)景視頻、駕駛員視頻和轉(zhuǎn)向盤轉(zhuǎn)角信號(hào),開發(fā)了基于機(jī)器視覺的視線方向及頭部姿態(tài)估計(jì)算法,并用眼動(dòng)儀驗(yàn)證算法的有效性;經(jīng)過數(shù)據(jù)清洗后,使用箱線圖和獨(dú)立樣本T檢驗(yàn)統(tǒng)計(jì)了駕駛員的注視、掃視特征、眼部和頭部運(yùn)動(dòng)特征與駕駛意圖的關(guān)聯(lián)性。
后續(xù)研究中:可引入車輛CAN信號(hào)中的轉(zhuǎn)向盤轉(zhuǎn)角、轉(zhuǎn)向燈狀態(tài)、車速等信息,對(duì)直行、換道等駕駛行為進(jìn)行更準(zhǔn)確的判斷;視覺算法可基于幀間的運(yùn)動(dòng)特征進(jìn)行目標(biāo)跟蹤,提高檢測(cè)速度和準(zhǔn)確率;可對(duì)各個(gè)特征與意圖之間的關(guān)聯(lián)性強(qiáng)弱進(jìn)行排序,選取關(guān)聯(lián)性較強(qiáng)的特征使用隱式馬爾科夫模型識(shí)別駕駛意圖。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
公民與法治(2016年4期)2016-05-17 04:09:26
小天使·一年級(jí)語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
