民機四維航跡/姿態(tài)一體化自適應(yīng)控制
2019-03-04 11:31:32樊垚邵興悅李清東任章
航空學報 2019年2期
樊垚,邵興悅,李清東,任章
1. 中國船舶工業(yè)系統(tǒng)工程研究院 信息系統(tǒng)研究所,北京 100094 2. 北京機電工程總體設(shè)計部,北京 100854 3. 北京航空航天大學 自動化科學與電氣工程學院,北京 100083
為了滿足高速發(fā)展的航空運輸需求,提高空域資源使用率,國際民航組織(ICAO)提出了新航行系統(tǒng)(FANS)的概念。新航行系統(tǒng)的核心組成部分是“基于性能導(dǎo)航(PBN)”的新型運行模式,該模式以改進航空系統(tǒng)效率、降低航空運營成本、提高航空運行安全性和空域使用率為目標,將航空機載設(shè)備、導(dǎo)航以及先進飛行控制技術(shù)緊密結(jié)合起來,為民航飛機運行的所有階段提供更加精確、安全的飛行方法。
民機在航路終端區(qū)的起飛/著陸階段是對其導(dǎo)航、引導(dǎo)和控制性能要求最高的航段,在此航段通常要求系統(tǒng)支持RNP-0.3甚至更為嚴格的規(guī)范,由于導(dǎo)航性能可以得到地面設(shè)備的有效支持,導(dǎo)航信息精度很高,此時飛行技術(shù)誤差(FTE)是系統(tǒng)總誤差(TSE)的主要部分。
飛行控制的本質(zhì)是一類欠驅(qū)動控制問題。傳統(tǒng)的飛控系統(tǒng)采用由內(nèi)向外的串級控制設(shè)計思想,外環(huán)慢變回路的動態(tài)特性受內(nèi)環(huán)回路特性的制約較為嚴重,飛機起飛/著陸階段對飛機航跡控制要求很高,采取串級控制方法設(shè)計的航跡控制器動態(tài)響應(yīng)慢,影響航跡控制精度。因此,必須采用引導(dǎo)控制一體化設(shè)計思想進行飛機四維航跡控制器設(shè)計,降低系統(tǒng)保守性,提高航跡響應(yīng)動態(tài)和控制精度。
隨著計算機技術(shù)和控制理論的發(fā)展,通過自動駕駛儀和自動油門綜合等方法現(xiàn)已實現(xiàn)飛機飛控/推力一體化設(shè)計[1-3],提高了系統(tǒng)的自動化能力,減小了飛行員的操縱負擔。飛控/推力一體化控制技術(shù)主要解決飛機姿態(tài)與飛行速度的動力學耦合問題,不能從本質(zhì)上降低串級飛控系統(tǒng)在航跡跟蹤控制設(shè)計上的保守性。Williams等提出一種導(dǎo)引控制一體化設(shè)計思想,并將其應(yīng)用于導(dǎo)彈制導(dǎo)控制系統(tǒng)的設(shè)計[4],根據(jù)彈目相對運動信息,直接產(chǎn)生導(dǎo)彈氣動舵面偏角控制指令,能夠充分發(fā)揮導(dǎo)彈的動力學能力,提高導(dǎo)彈制導(dǎo)回路的響應(yīng)速度。結(jié)合目標加速度測量與估計技術(shù),基于滑模變結(jié)構(gòu)控制理論可以完成飛行器導(dǎo)引控制一體化設(shè)計[5-6]。通過使用神經(jīng)網(wǎng)絡(luò)估計系統(tǒng)不確定性和誤差,基于反步法能夠?qū)崿F(xiàn)飛行器導(dǎo)引控制一體化控制的目的[7-9]。通過結(jié)合線性二次型最優(yōu)控制理論,使用反饋線性化方法也可以構(gòu)建飛行器一體化飛行控制系統(tǒng)[10-12]。引入指令濾波器,采用自適應(yīng)反演控制器實現(xiàn)無人機自主著艦橫側(cè)向控制[13]。當前,一體化飛行控制技術(shù)研究主要解決飛行器引導(dǎo)與控制回路動力學特性匹配的問題,針對航跡跟蹤和到達時間高精度要求的研究工作尚未廣泛開展。因此,為了有效解決民機航路終端區(qū)高精度航跡跟蹤控制問題,應(yīng)在充分借鑒現(xiàn)有一體化飛控系統(tǒng)設(shè)計思想的基礎(chǔ)上,開展四維航跡/姿態(tài)一體化控制技術(shù)研究。
此外,飛機飛行在一個變化的大氣環(huán)境中,機身各部分受到的空氣動力不同,在起飛離場和進近著陸階段飛機速度較低,這種效應(yīng)更加顯著。對于飛行控制系統(tǒng)而言,這種效應(yīng)可以理解為飛機動力學系數(shù)的不確定性。由于地面效應(yīng)的影響,地表附近產(chǎn)生大氣擾動通過飛機航跡控制器間接產(chǎn)生的飛行技術(shù)誤差是起飛離場和進近著陸階段的主要誤差因素之一。引入自適應(yīng)算法是增強飛行器控制系統(tǒng)魯棒性的有效途徑,采用基于圖像的導(dǎo)彈/無人機自適應(yīng)末制導(dǎo)律可以消除目標尺寸、彈目相對距離和圖像傳感器引起的不確定性影響[14-16],自適應(yīng)飛行控制律也被用于解決擾動過程作用下飛機姿態(tài)控制問題,有效地改善飛行品質(zhì)[17]。
本文基于LQG/LTR(Linear Quadratic Gaussian/ Loop Transfer Recovery)控制技術(shù)提出一種自適應(yīng)四維航跡/姿態(tài)一體化控制方法。該控制方法以LQG方法為基礎(chǔ),利用LTR技術(shù)實現(xiàn)狀態(tài)估計器和反饋控制器參數(shù)的匹配,在此基礎(chǔ)上,引入基于自適應(yīng)投影算子來補償系統(tǒng)匹配不確定性,解決動力學系數(shù)不確定條件下的飛機航跡精確控制問題。
1 飛機動力學與環(huán)境特性模型
1.1 縱向航跡/姿態(tài)線性動力學模型
為了實現(xiàn)引導(dǎo)控制一體化設(shè)計思想,設(shè)計控制律所需的數(shù)學模型應(yīng)精確地反映飛機空間六自由度運動,而不能將質(zhì)心運動與繞質(zhì)心轉(zhuǎn)動分開考慮,忽略其相互影響。基于小擾動假設(shè),建立了飛機線性化動力學模型[18-19],并將其分解為縱向和橫側(cè)向運動兩個部分,飛機縱向小擾動線性化方程組標準矩陣形式為
(1)
式中:Δ表征基準狀態(tài)變量的擾動量;狀態(tài)矢量xv包含的狀態(tài)變量為縱向位移xg、高度zg、航跡速度VK、航跡速度迎角αK、俯仰角速率q和俯仰角θ的基準狀態(tài)擾動量;控制矢量uv包含的控制變量為油門開度δf和升降舵偏δe的基準狀態(tài)擾動量。
式中:
其中:m為飛機質(zhì)量;Iy為飛機繞y軸轉(zhuǎn)動慣量;V0為飛機基準速度;γ0為飛機基準航跡傾角;α0為飛機基準迎角;σ為發(fā)動機安裝角;Te為推力偏心距;采用“XY”的形式表示飛機各無因次的氣動導(dǎo)數(shù),L為升力;C為側(cè)力;D為阻力;T為推力;Ld為滾轉(zhuǎn)力矩;Md為俯仰力矩;Nd為偏航力矩;α為飛機迎角;V為飛機速度;q為俯仰角速度;g為重力加速度。
1.2 橫側(cè)向航跡/姿態(tài)線性動力學模型
以水平協(xié)調(diào)轉(zhuǎn)彎飛行狀態(tài)為基準狀態(tài),飛機橫側(cè)向小擾動線性化運動方程組標準矩陣形式為
(2)
式中:Δ表征基準狀態(tài)變量的擾動量,狀態(tài)矢量xh包含的狀態(tài)變量為側(cè)向位移yg、航跡速度側(cè)滑角βK、滾轉(zhuǎn)角速率p、偏航角速率r、滾轉(zhuǎn)角φ和偏航角ψ的基準狀態(tài)擾動量;控制矢量uh包含的控制變量分別為副翼偏角δa和方向舵偏角δr的基準狀態(tài)擾動量。
式中:
式中:Ix為飛機繞x軸轉(zhuǎn)動慣量;Iz為飛機繞z軸 轉(zhuǎn)動慣量;Izx為飛機交叉慣性積;φ0為飛機基準滾轉(zhuǎn)角;θ0為飛機基準俯仰角;采用“XY”的形式表示飛機各無因次的氣動導(dǎo)數(shù),β為飛機側(cè)滑角;其他變量定義與縱向航跡/姿態(tài)線性動力學模型一致。
1.3 大氣風場特性模型

(3)
飛機受到的氣動力和力矩取決于當前飛行狀態(tài),風速VW對空速VA和迎角α、側(cè)滑角β等飛行狀態(tài)都會產(chǎn)生影響。風場VW以及由風速沿機體的非均勻分布造成的風速梯度都能夠使飛行狀態(tài)相對無風情況發(fā)生偏移,引起附加氣動力和力矩作用。因此,常值風的作用可以等效為氣動參數(shù)的不確定性。此外,由于流體力學系統(tǒng)的非線性本質(zhì),必須把大氣紊流作為隨機過程進行處理,這里,采用Dryden模型描述大氣紊流的尺度與強度[18]。
2 LQG/LTR控制方法及設(shè)計流程
線性高斯二次型(LQG)方法是解決隨機線性系統(tǒng)最優(yōu)控制問題的一種有效設(shè)計方法。隨機系統(tǒng)的狀態(tài)變量不能直接用于狀態(tài)反饋,必須使用卡爾曼濾波方法對其進行估計,那么,最優(yōu)控制問題與最優(yōu)估計問題就需共同解決。LQG方法通過分別設(shè)計最優(yōu)狀態(tài)估計器和最優(yōu)狀態(tài)反饋控制律構(gòu)成隨機最優(yōu)反饋控制系統(tǒng)。狀態(tài)估計器和最優(yōu)狀態(tài)反饋控制律設(shè)計滿足分離定理[20]。
典型線性系統(tǒng)的狀態(tài)方程和輸出方程為

(4)
式中:x(t)∈Rn為狀態(tài)向量;y(t)∈Rr為輸出向量;u(t)∈Rm為控制向量;A∈Rn×n為狀態(tài)矩陣;B∈Rn×m為控制矩陣;C∈Rr×n為輸出矩陣;G∈Rn×p為過程噪聲矩陣。實際系統(tǒng)的動態(tài)過程與測量輸出均會受到噪聲的影響,w(t)∈Rp為過程噪聲,v(t)∈Rr為測量噪聲,其協(xié)方差矩陣如下
式中:δ(t-τ)為Dirac函數(shù)。
圖1為LQG控制器結(jié)構(gòu)示意圖,LQG控制器的傳遞函數(shù)矩陣為
K(s)=Kc(sI-A+BKc+KfC)-1Kf
控制器性能完全取決于控制增益矩陣Kc和Kf,定義隨機性能指標J為
式中:Q為狀態(tài)權(quán)值矩陣,Q=QT≥0;R為輸出權(quán)值矩陣,R=RT>0。
隨機線性調(diào)節(jié)器的最優(yōu)狀態(tài)反饋控制規(guī)律為
u(t)=-Kcx(t)
(5)

圖1 LQG控制器結(jié)構(gòu)示意圖Fig.1 Schematic diagram of LQG controller structure
狀態(tài)反饋增益矩陣Kc為
Kc=R-1BTPc
(6)
ATPc+PcA-PcBR-1BTPc+MQMT=0
(7)

此外,當系統(tǒng)完全可控且完全可觀時,線性系統(tǒng)的卡爾曼濾波器是漸近穩(wěn)定的,穩(wěn)態(tài)卡爾曼濾波器增益矩陣Kf為
Kf=PfCTV-1
(8)
PfAT+APf-PfCTV-1CPf+GWGT=0
(9)
對于LQG問題而言,系統(tǒng)控制輸入信號u(t)的作用會影響到狀態(tài)估計的效果,體現(xiàn)為過程噪聲協(xié)方差矩陣W增加了與控制變量有關(guān)的部分,如式(10)所示。將Γ作為新的輸入噪聲標準差向量,利用式(9)設(shè)計卡爾曼濾波器。
ΓΓT=GWGT+q2BBT
(10)
式中:q為卡爾曼濾波器調(diào)節(jié)參數(shù)。
當在LQG控制回路中引入卡爾曼濾波器后,控制器參數(shù)的不合理選擇將導(dǎo)致系統(tǒng)穩(wěn)定裕度下降[21]。因此,LQG控制器設(shè)計的核心問題是協(xié)調(diào)設(shè)計最優(yōu)反饋控制矩陣Kc和卡爾曼濾波矩陣Kf以同時保證系統(tǒng)的性能和魯棒性。LQG/LTR方法的核心思想是設(shè)計理想的補償控制器使得系統(tǒng)開環(huán)頻率特性能夠在系統(tǒng)關(guān)注的頻率范圍內(nèi)逼近動態(tài)性能良好的預(yù)設(shè)目標回路[22-23]。首先需要根據(jù)指標要求設(shè)計具有良好動態(tài)性能和魯棒穩(wěn)定性的最優(yōu)狀態(tài)調(diào)節(jié)器回比函數(shù),隨后設(shè)計最優(yōu)卡爾曼濾波器,使得輸出端回比函數(shù)能夠在一個足夠大的頻域范圍內(nèi)恢復(fù)預(yù)先設(shè)計的回比函數(shù)。當式(10)中q→∞時,系統(tǒng)輸出端的回比函數(shù)可以實現(xiàn)有效恢復(fù),逼近期望回路特性[22],即圖1中斷開點為2時的回比函數(shù)趨近于斷開點為1時的回比函數(shù)。
3 四維航跡/姿態(tài)一體化控制器設(shè)計
3.1 控制器構(gòu)型選擇
非均勻風場流過飛機時,機身各處受到氣流作用不同,因此各部分產(chǎn)生的氣動力也不相同,從控制系統(tǒng)設(shè)計的角度而言,這種現(xiàn)象可以理解為一種系統(tǒng)參數(shù)不確定性。魯棒控制理論通常適用于參數(shù)不確定系統(tǒng)的控制器設(shè)計,Zhou和Ren基于Youla參數(shù)化分解理論[24],提出了一種新型魯棒控制器構(gòu)型,如圖2所示,魯棒控制器K由M,N,U,V,Q這5部分實現(xiàn)。
定理1[24]已知被控對象P的標稱模型為P0,P0的左互質(zhì)分解為P0=M-1N,K0為能穩(wěn)定標稱模型P0的一個標稱控制器,K0的左互質(zhì)分解為K0=V-1U,則所有能穩(wěn)定被控對象P的控制器K能表示為
K=(V-QN)-1(U+QM)

將上述新型魯棒控制器構(gòu)型應(yīng)用于實際系統(tǒng)設(shè)計,控制器設(shè)計分為兩部分,一部分是以跟蹤誤差為輸入的主控制器,主要考慮系統(tǒng)的性能;另一部分是以系統(tǒng)估計誤差為輸入的補償控制器,主要考慮對不確定性和干擾的補償,韓京清提出了自抗擾控制理論,采用擴張狀態(tài)觀測器估計補償系統(tǒng)不確定性和外部擾動[25],可以通過合理設(shè)計輸出誤差校正函數(shù)或采用線性/非線性切換控制方法實時估計系統(tǒng)不確定性和外部擾動[25-27],使得擴張狀態(tài)觀測量逼近系統(tǒng)真實存在的不確定性和擾動值。
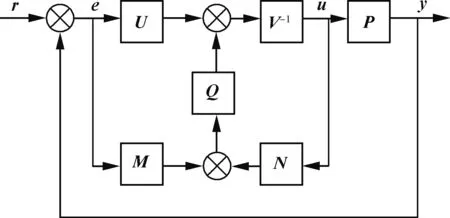
圖2 基于Youla參數(shù)化方法的魯棒控制器構(gòu)型Fig.2 Youla parameterization roubst controller structure

圖3 新型魯棒控制器構(gòu)型Fig.3 Improved robust controller structure
采用新型魯棒控制器構(gòu)型和自抗擾控制技術(shù)能夠兼顧系統(tǒng)的控制性能和魯棒性,比較適用于飛行控制這類高可靠性和安全性要求的系統(tǒng),但是由于民機飛行控制系統(tǒng)基本工作在飛行狀態(tài)平衡點附近,航跡/姿態(tài)一體化控制器設(shè)計的目標是為了實現(xiàn)系統(tǒng)穩(wěn)定,消除狀態(tài)偏差,改善動態(tài)特性。因此,考慮到氣動參數(shù)不確定性對飛行控制系統(tǒng)的影響,提出一種基于LQG/LTR技術(shù)的自適應(yīng)控制器構(gòu)型,如圖4所示,該構(gòu)型在前述魯棒控制構(gòu)型的基礎(chǔ)上,不引入觀測器實時估計系統(tǒng)不確定性與干擾,而采用自適應(yīng)控制技術(shù)生成補償控制量ucf抑制不確定性對系統(tǒng)性能的影響,因此,能夠簡化飛行控制律結(jié)構(gòu),降低工程實現(xiàn)復(fù)雜性,進而提高飛行控制系統(tǒng)可靠性。

圖4 基于LQG/LTR技術(shù)的自適應(yīng)控制器構(gòu)型Fig.4 Adaptive controller structure based on LQG/LTR
3.2 基于LQG/LTR的自適應(yīng)控制方法
引入平滑投影算子[28]設(shè)計自適應(yīng)控制律。定義參數(shù)矩陣Θ為
定義光滑凸函數(shù)集F(Θ)為
參數(shù)向量Θi的有界范數(shù)極值Θmax>0,0<ε<1。
定義Ωci為帶有平滑邊界的凸緊集:
定義矩陣投影算子proj(Θ,Y)為
proj(Θ,Y)=
proj(Θi,Yi)=

Ω0i={Θi∈Rn|fi(Θi)≤0}
(11)
(12)
那么,對于所有的t≥t0,參數(shù)向量Θi(t)滿足

引理3系統(tǒng)式(4)同時采用反饋控制增益式(6)和卡爾曼濾波增益式(8)可以保證系統(tǒng)閉環(huán)狀態(tài)矩陣Ae是Hurwitz穩(wěn)定,且存在正定矩陣Qe使得下式成立。
式中:
當系統(tǒng)存在輸入不確定性時,系統(tǒng)式(4)可表示為

(13)
為了抑制不確定性對系統(tǒng)的影響,引入自適應(yīng)反饋控制律為
(14)
系統(tǒng)狀態(tài)方程可重新列寫為

(15)

此外,系統(tǒng)狀態(tài)估計器方程為
(16)

因此,系統(tǒng)狀態(tài)變量估計誤差方程為


關(guān)于E(t)的狀態(tài)方程為
(17)
定理2采用狀態(tài)估計器式(16),自適應(yīng)反饋控制律式(14)和自適應(yīng)律式(18)可以保證廣義狀態(tài)誤差系統(tǒng)式(17)一致最終有界,廣義誤差向量E(t)收斂于Ω,如式(19)。如果不考慮系統(tǒng)噪聲,即,w(t)=0且v(t)=0時,E(t)漸近收斂于0。
(18)
(19)
Ω0=4k2λmin(Qe)-4k4Θmax-
式中:λmin(Qe)為Qe的最小特征值;k為任意正實數(shù)。
證明:定義Lyapunov函數(shù)為
ET(t)PeBe1w(t)+ET(t)PeBe2v(t)+
根據(jù)引理1,可得:
由于向量g(t)的范數(shù)存在如下關(guān)系
gT(t)g(t)≤ΘmaxET(t)E(t)
(20)
根據(jù)式(20)及引理3,可得
(-λmin(Qe)+k2Θmax+
ET(t)E(t)+k2[wT(t)w(t)+vT(t)v(t)]

當不考慮系統(tǒng)噪聲時,即認為w(t)=0且v(t)=0,有如下不等式成立
ET(t)E(t)dt≤
因此,E(t)∈2。由引理3可知Ae為Hurwitz穩(wěn)定,那么,根據(jù)狀態(tài)方程式(17)可知,∞。根據(jù)引理2,狀態(tài)向量誤差E(t)漸近收斂于0,即
E(t)→0,t→∞
證畢。
4 民機四維航跡/姿態(tài)一體化控制器設(shè)計
PBN運行模式下的民機飛行控制系統(tǒng)的設(shè)計目標是精確控制航跡,減小飛行技術(shù)誤差,所以飛機縱向運動的被控變量為Δxg和Δzg,考慮到飛機側(cè)滑轉(zhuǎn)彎特性,飛機橫側(cè)向運動的被控變量為Δyg和ΔβK,那么,系統(tǒng)觀測方程為

式中:
觀測方程可重新表示為
式中:Ξ分別為v、h。基于自適應(yīng)LQG/LTR方法的飛機四維航跡/姿態(tài)一體化控制器設(shè)計過程如下:
1) 期望最優(yōu)調(diào)節(jié)器回路設(shè)計
根據(jù)式(5)~式(7)設(shè)計期望最優(yōu)調(diào)節(jié)器回路作為標稱控制器,滿足系統(tǒng)性能要求。
2) 基于LTR技術(shù)的卡爾曼濾波器設(shè)計
根據(jù)式(8)~式(10)設(shè)計卡爾曼濾波器,通過合理選擇參數(shù)在大頻率范圍內(nèi)恢復(fù)回比函數(shù)。
3) 自適應(yīng)反饋控制律設(shè)計
在標稱控制器的基礎(chǔ)上,根據(jù)自適應(yīng)算子式(18) 和反饋控制律式(14)設(shè)計飛機四維航跡/姿態(tài)一體化自適應(yīng)控制律。
5 仿真驗證
以某型民機進近階段典型工作點為例,分別設(shè)計縱向航跡/姿態(tài)一體化控制器和橫側(cè)向航跡/姿態(tài)一體化控制器,同時進行數(shù)字仿真以驗證控制器性能,參考工作點狀態(tài)如表1所示。

表1 民機典型工作點狀態(tài)Table 1 States of operating point of civil aircraft
通過設(shè)定飛機縱向和橫側(cè)向航跡/姿態(tài)一體化控制器參數(shù)Q,R可得反饋增益矩陣Kc。通過設(shè)定飛機縱向和橫側(cè)向航跡/姿態(tài)一體化控制器卡爾曼濾波器參數(shù)W,q可得卡爾曼濾波器增益矩陣Kf。通過設(shè)定飛機縱向和橫側(cè)向控制參數(shù)矩陣G,并代入式(18)可解算系統(tǒng)自適應(yīng)反饋控制量。

(21)
大氣擾動對飛行控制的影響可認為是飛機氣動系數(shù)存在乘性不確定性,如式(22)所示:
C=(1+0.3sint]C*
(22)
式中:C*為氣動系數(shù)標稱值;C為氣動系數(shù)實際值。
圖5~圖7為存在大氣擾動條件下飛機縱向位置誤差、高度誤差和側(cè)向位置誤差響應(yīng)曲線,圖8 為存在大氣擾動條件下飛機側(cè)滑角響應(yīng)曲線。
由圖可知,基于自適應(yīng)投影算子的LQG/LTR控制器能夠抑制較大氣動參數(shù)不確定性對飛控系統(tǒng)的影響,驗證了存在大氣擾動條件下民機四維航跡/姿態(tài)一體化自適應(yīng)控制方法的有效性。
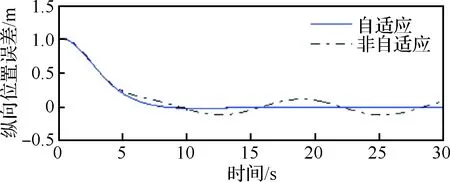
圖5 存在大氣擾動條件下縱向位置誤差響應(yīng)曲線Fig.5 Response curves of vertical position error under atmospheric disturbance conditions

圖6 存在大氣擾動條件下高度誤差響應(yīng)曲線Fig.6 Response curves of height error under atmospheric disturbance conditions

圖7 存在大氣擾動條件下側(cè)向位置誤差響應(yīng)曲線Fig.7 Response curves of lateral position error under atmospheric disturbance conditions

圖8 存在大氣擾動條件下側(cè)滑角響應(yīng)曲線Fig.8 Response curves of sideslip angle under atmospheric disturbance conditions
6 結(jié) 論
1) 基于LQG/LTR技術(shù)設(shè)計飛機四維航跡/姿態(tài)一體化控制器,實現(xiàn)狀態(tài)估計器和反饋控制器參數(shù)匹配,解決隨機多變量系統(tǒng)的綜合問題。
2) 提出了基于投影算子的自適應(yīng)控制方法,估計和補償大氣擾動引起的氣動參數(shù)不確定性影響。
3) 基于自適應(yīng)LQG/LTR控制方法的民機四維航跡/姿態(tài)一體化控制器,能夠?qū)崿F(xiàn)大氣擾動作用下精確四維航跡跟蹤,減少飛行技術(shù)誤差。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04
電源技術(shù)(2016年9期)2016-02-27 09:05:39