對電空轉轍機控制電路改進的設想
2019-03-04 03:49:00李志兵
鐵路通信信號工程技術 2019年1期
李志兵
(1.北京全路通信信號研究設計院集團有限公司,北京 100070;2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
1 問題的提出
電空轉轍機適用于有壓縮空氣源的駝峰調車場,是借助于壓縮空氣完成轉換道岔、鎖閉道岔和表示尖軌位置的快速道岔轉換設備,由于其拉力大,動作快,節省能源,在全路駝峰上廣泛使用。但在使用過程中道岔中途轉換的現象偶有發生,原因以機械故障和道岔卡阻為多。駝峰溜放下峰的鉤車沒有動力牽引,而駝峰岔路道岔的轉換是在上級道岔占用后,本級道岔才開始轉換,一旦本級道岔或轉轍機出現問題,事故將不可避免,因此要徹底消除事故是不可能的,但可以通過修改設備或控制電路減少事故發生的概率。
2 電空轉轍機工作原理
電空轉轍機以空氣為轉換動力帶動道岔轉換,電磁先導閥受電路控制導通空氣通道,二者缺一不可。
當定(反)位電磁先導閥勵磁,換向閥換向,氣缸前腔進氣,活塞桿縮回,待尖軌與基本軌重新密貼后,接通定(反)位表示電路。
ZK4電空轉轍機比ZK3電空轉轍機增加電磁鎖閉閥,電磁鎖閉閥在壓力開關控制下處于長期通電狀態,當風壓高于壓力開關接通設定值時,壓力開關接通電磁鎖閉閥電路,鎖閉桿處于縮回狀態;當風壓低于壓力開關斷開風壓設定值時,壓力開關切斷電磁鎖閉閥電路,鎖閉桿伸出,鎖閉活塞桿,從而鎖閉道岔,保持尖軌位置。
3 駝峰分路道岔控制要求
根據《自動化駝峰技術條件》(TB/T 2306)和《鐵路駝峰信號及編組站自動化系統設計規范》(TB 10069),駝峰分路道岔電空轉轍機控制要求匯總如下。
分路道岔應采用快動型轉轍設備,其轉換時間電空轉轍機應不大于0.6 s。
分路道岔除自動控制外,應有手動控制的功能,且手動優先于自動控制。
道岔轉換設備的動作必須與值班員的操縱意圖一致。
分路道岔應與有關的信號機聯鎖,解體車列時,與駝峰信號無聯鎖關系。
分路道岔應受進路鎖閉、區段鎖閉及人工鎖閉。
按進路命令轉換的分路道岔在車組進入道岔尖軌前自動轉換至規定位置。
已被操縱的分路道岔,當車列駛入其區段時,若轉轍機自動開閉器尚未斷開,則不能再進行轉換;若已斷開,則應轉換到底。
在車組進入分路道岔保護區段前,若道岔在規定時間內不能轉換到底時,經操縱或經一定時間(電空轉轍機1.0~1.2 s)后道岔應能向原位轉換。
道岔恢復應有報警,且必須經人工確認后,該道岔才能再次投入使用。
道岔執行電路應遵循故障-安全原則。
分路道岔表示應與道岔的實際位置一致。
表示電路應與轉轍機自動開閉器接點狀態一致。
當道岔不密貼時,嚴禁出現道岔位置表示。
發生擠岔時,應有擠岔報警信息。
4 既有駝峰分路道岔電空轉轍機控制電路
根據《駝峰自動集中電路圖冊》(電號7021)、《關于對駝峰自動集中電路圖冊分路道岔轉轍機控制電路修改的通知》(建技[2001]81號)和《ZK4-170型電空轉轍機使用說明書》,現行駝峰分路道岔轉轍機控制電路如圖1,2所示。
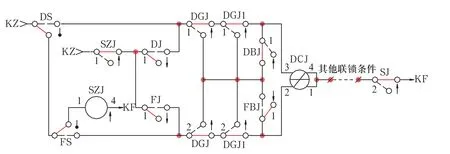
圖1 電空轉轍機啟動部分電路圖Fig.1 The circuit diagram of start up part of electropneumatic switch machine
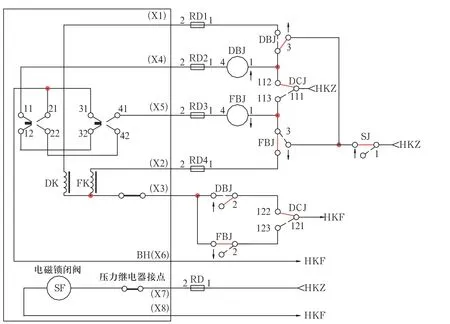
圖2 ZK4電空轉轍機室外控制電路圖Fig.2 The outdoor control circuit diagram of ZK4 electropneumatic switch machine
5 道岔轉換過程分析
道岔轉換的過程(假設道岔由定位向反位轉換):FS吸起(手柄扳到反位)或FJ吸起(且SZJ吸起)→DCJ落下→反位電磁先導閥得電勵磁→換向閥換向→開始轉換→DBJ落下→道岔轉換→FBJ吸起→反位電磁先導閥失電。
道岔轉換過程及動作結果如表1所示。
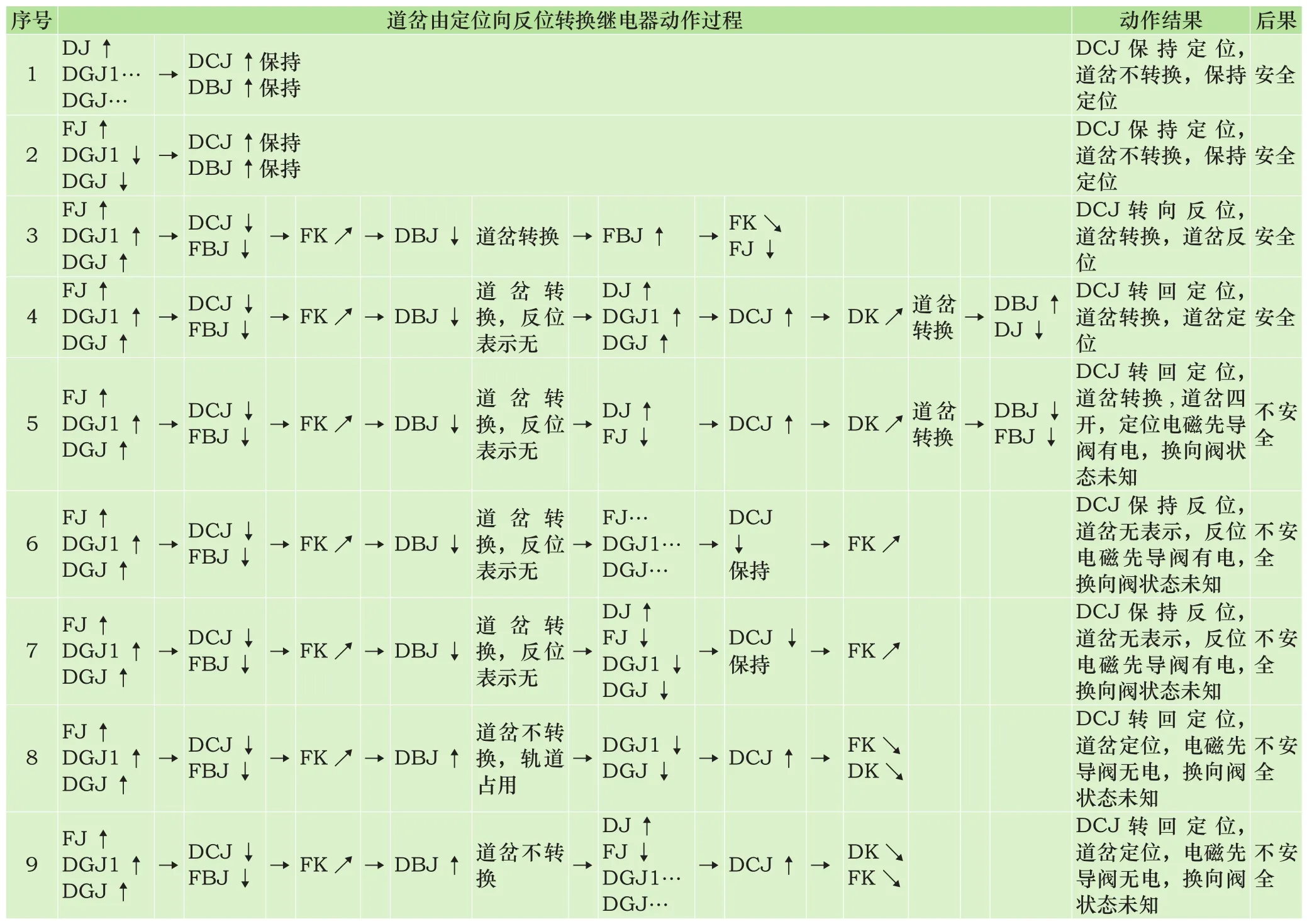
表1 道岔由定位向反位轉換過程及動作結果Tab.1 The process and operation result of the point switching from normal position to reverse position
由表1可知:
第1、2、3、4種情況,操作是安全的。
第5種情況,道岔由定位向反位轉換后,反位表示未吸起,道岔再次由反位向定位轉換,定位表示也未吸起,道岔處于四開狀態。如果此時溜放鉤車進入道岔區段,可能會發生脫線事故。控制系統對此現象有一定的防護功能,會對該道岔的上級道岔進行防護,但如果鉤車已經壓入上級道岔,無法實施防護功能,事故還會發生。控制電路和轉換設備無法避免該情況發生。
第6、7種情況,道岔由定位向反位轉換后,反位表示未吸起,這時如果鉤車跟蹤比較緊,后鉤車已進入道岔區段,由于保護區段的長度只保護一鉤車在道岔啟動后轉換到底,這時已無法采取防護措施,道岔處于不安全狀態,可能會發生脫線事故。控制電路和轉換設備無法避免該情況發生。
第8、9種情況,反位電磁先導閥得電勵磁后,由于道岔卡阻或機械故障道岔未轉動,道岔表示保持不變(DBJ吸起);當鉤車進入道岔區段后,軌道繼電器DGJ1落下和DGJ落下,使DCJ反轉回和表示一致的位置,即DCJ吸起,但由于DBJ吸起,無法向定位電磁先導閥供電,風路仍保持在反位位置,而只是斷開了對原來反位電磁先導閥的供電。當車輛進入后,由于振動使卡阻減小或消失,道岔開始轉向反位,可能發生車輛脫線事故。轉換設備或控制電路改造后,可以減少該種情況的發生。
當道岔從反位扳向定位時,以上各種情況同樣存在。
6 解決方案
針對上述分析結果,對第8、9兩種情況,結合電空轉轍機設備、繼電器控制電路和駝峰控制系統綜合解決,最大限度減少這種現象的發生。
6.1 方案一:改進電空轉轍機
修改電空轉轍機設備,電磁先導閥得電道岔不能轉換的情況下,在電磁先導閥失磁后,轉轍機不再進行轉換,可以徹底解決上述8、9兩種情況。本方案不需要修改繼電器控制電路和駝峰控制系統,但轉轍機設備改動的難度可能比較大。
6.2 方案二:修改電磁鎖閉閥供電電路
利用ZK4電空轉轍機的電磁鎖閉閥,在出現電磁先導閥勵磁道岔不能轉換的情況下,通過控制電磁鎖閉閥的電源,實現對道岔的鎖閉。
在電磁鎖閉閥的供電電路中增加SJ條件,修改電路如圖3所示。
駝峰控制系統正常時,SJ吸起。操縱道岔轉換DCJ轉極后,在規定的時間(如0.6 s)內,如果原道岔表示仍保持,意味著道岔不能正常轉換,駝峰控制系統或人工控制鎖閉繼電器落下,使電磁鎖閉閥失磁鎖閉道岔。待室外設備正常后,控制鎖閉繼電器勵磁,道岔恢復正常使用。
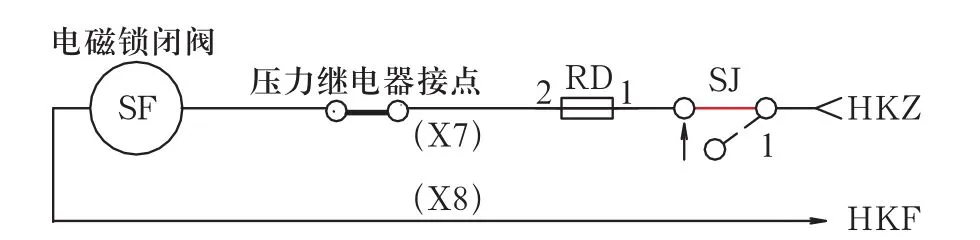
圖3 電磁鎖閉閥供電電路圖Fig.3 The power supply circuit diagram of electromagnetic lock valve
本方案修改難度比較小,SJ有多余的節點,電磁鎖閉閥的供電電路增加SJ節點,駝峰控制系統修改SJ的控制邏輯。本方案可以有效減少事故的發生概率。但由于SJ落下時間大于2 s,在前后鉤車間隔小,后車速度快時,電路可能來不及動作,不能完全避免8、9兩種情況。
6.3 方案三:修改電空轉轍機室外控制電路
利用既有繼電器增加電空轉轍機電磁先導閥供電通道,通過修改駝峰控制系統控制時機,在出現異常情況時,使電磁先導閥回到原位。
如圖4所示,駝峰控制系統修改道岔控制邏輯,并在道岔轉換到位表示構成后切斷轉換條件。
道岔轉換過程(假設道岔由定位向反位轉換):
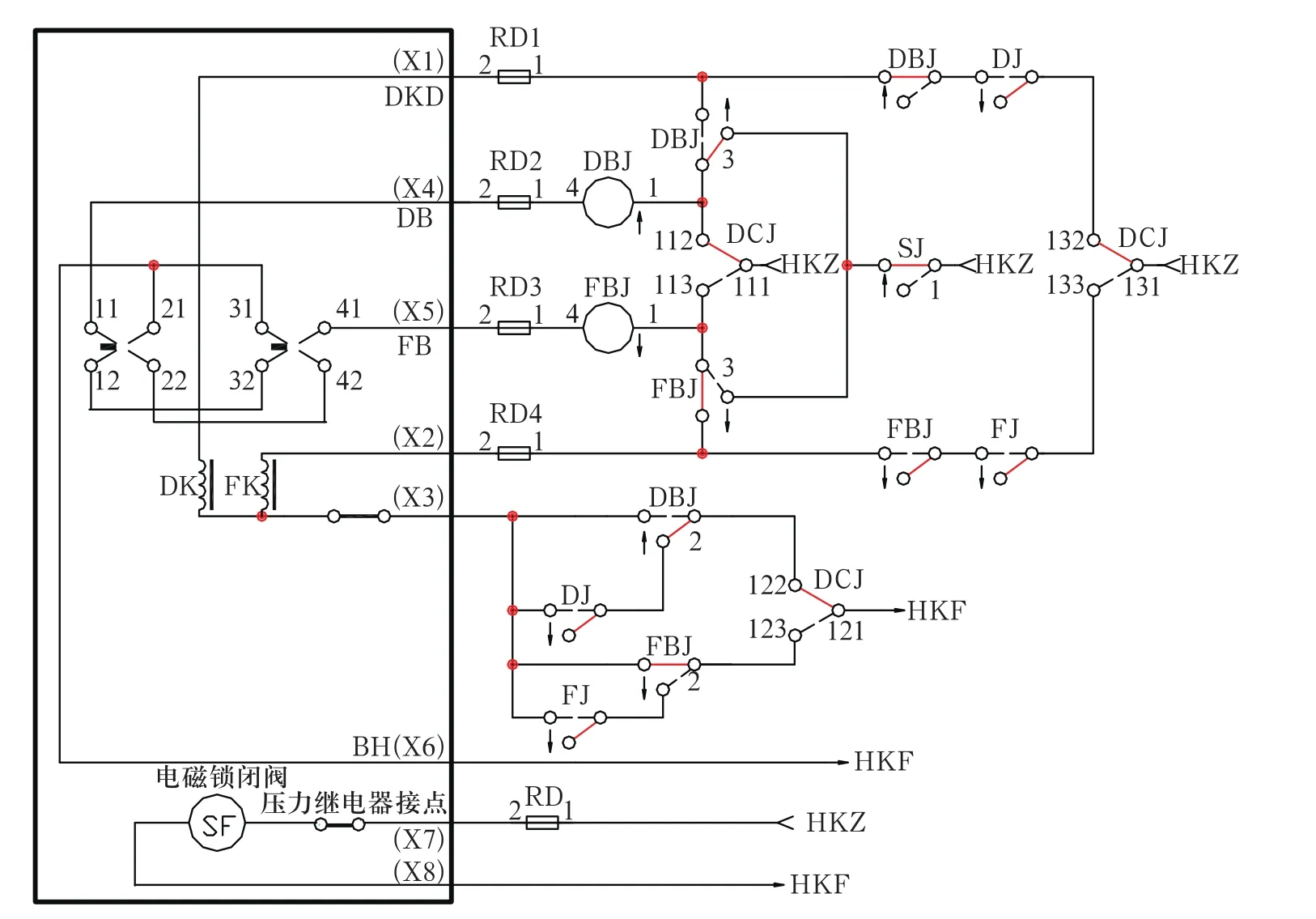
圖4 ZK4電空轉轍機室外控制電路修改圖Fig.4 The modification diagram of outdoor control circuit of ZK4 electropneumatic switch machine
正常轉換:新增的電路在道岔正常啟動時不起作用,在道岔轉換到位表示構成后,FJ落下前對FK有短暫的持續供電,不影響道岔控制。
轉換異常:FJ吸起→DCJ落下,如果原道岔表示仍保持,意味著道岔不能正常轉換,在一定時間后,駝峰控制系統或人工控制DJ吸起、FJ落下→DCJ吸起,由于DBJ吸起,使定位電磁先導閥勵磁,駝峰控制系統或人工控制DJ落下,切斷定位電磁先導閥勵磁電路,室外控制電路恢復。
本方案修改難度比較小,DCJ、DBJ、FBJ、DJ、FJ有多余的節點,駝峰控制系統修改道岔轉換控制邏輯。本方案可以大大減少事故的發生概率。由于保護區段的長度只保護一鉤車在道岔啟動后轉換到底,如果在等候判斷時間內道岔發生轉換,在保護區段短、前后鉤車間隔小、后車速度快時,電路可能來不及動作,不能完全避免8、9兩種情況。
