CBTC測試平臺車載控制器控車功能測試的設計
2019-03-07 03:10:54吳仁杰徐中偉
鐵路計算機應用 2019年2期
關鍵詞:設備
吳仁杰,徐中偉
(同濟大學 電子與信息工程學院,上海 201804 )
在計算機技術、網絡通信技術和控制技術的推動下,基于通信的列車控制(CBTC,Communication Based Train Control)系統成為軌道交通信號控制系統必然的發展趨勢。為了測試與驗證CBTC系統功能和性能,需要設計一種安全高效的CBTC系統測試平臺[1]。
在實際運營場景中,CBTC系統的車載列車自動防護(ATP)子系統負責與列車安全運行相關的功能,持續檢測列車當前速度和位置,為列車提供速度限制、移動授權,實時對列車進行速度監督和超速防護[2]。作為保障列車安全運行的車載ATP設備,對于車載控制器(VOBC ,vehicle on-board controller)控車功能的測試是CBTC測試平臺的一項重要內容。
目前,國內對VOBC的研究主要集中在對其功能的實現,而對VOBC功能的測試研究則很少見。如文獻[2]通過設計和實現車載ATP子系統,實現了其ATP防護及控車功能;文獻[3]則通過構建列車自動運行(ATO)子系統,實現了列車自動駕駛功能。
本文通過對列車常見運行場景進行分析,設計了真實VOBC與仿真車輛的交互過程,以實現對VOBC控車功能的測試。
1 CBTC測試平臺架構簡介
CBTC系統設計工程規模巨大,僅依靠現場真實設備和場景來驗證設計的正確性,其工程量將不可估量,工程周期難以保證[4]。但是通過計算機仿真技術,能夠實現適用于不同信號系統、不同線路、不同列車的城市軌道交通CBTC系統通用測試平臺,且該平臺具備良好的穩定性、兼容性、可擴展性和動態可配置性。為實現并滿足半實物半仿真測試平臺需求,通過研究真實設備接口和仿真環境的接口適配與接入控制技術,搭建了一個全場景一體化的室內實驗室和室外現場聯動的CBTC系統仿真測試平臺,實現測試平臺與被測CBTC系統的無縫對接。該通用測試平臺既能滿足與CBTC系統仿真軟件通信的需求,又能實現真實CBTC設備的接入,通用測試平臺系統結構,如圖1所示。
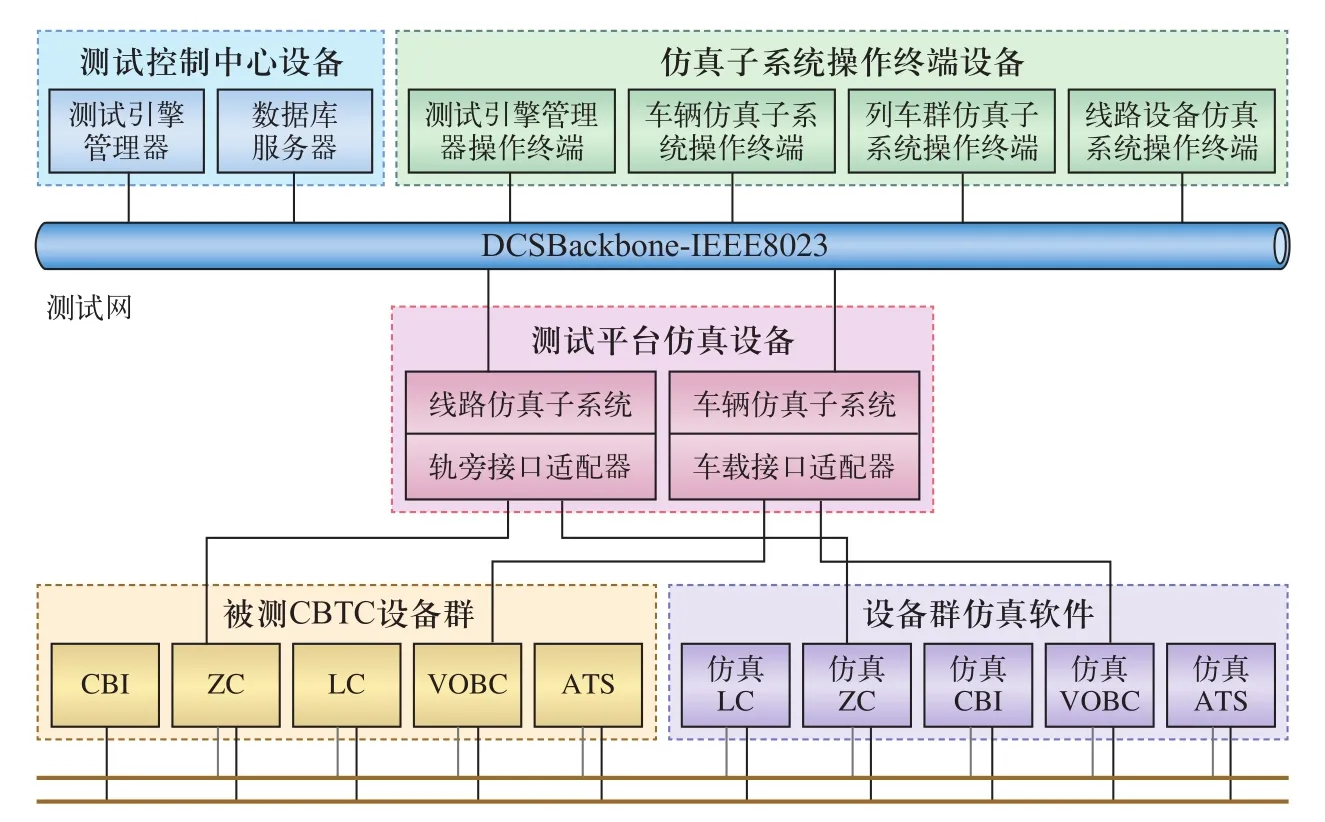
圖1 CBTC系統測試平臺架構圖
整個測試平臺由以下5個部分組成。
(1)測試控制中心設備:為測試平臺提供測試數據與測試案例;
(2)仿真子系統操作終端設備群:為測試人員提供人機交互界面;
(3)測試平臺仿真設備:與被測CBTC設備群交互,完成對被測設備的功能測試;
(4)被測CBTC設備群:真實的待測物理設備,通過與測試平臺仿真設備交互完成測試;
(5)設備群仿真軟件:測試平臺初始階段用于對測試平臺仿真設備(如線路仿真子系統、車輛仿真子系統)的調試,使其具備測試能力。
本文要研究的對象是測試平臺仿真設備中的車輛仿真子系統與被測CBTC設備群中的VOBC,通過對兩者之間的信息交互及流程設計,完成對VOBC部分控車功能的測試。
2 VOBC概述
VOBC能保證列車的故障—安全(Fail-Safe)原則,是車載設備中最重要的設備,它是實際的控車設備,所有與信號安全有關的操作都由它來負責[5]。一般情況下,列車的每一端駕駛室都有一個VOBC,以下內容都是就列車的某一端駕駛室及其VOBC進行討論的。
由于被測VOBC是通過繼電器接口進行信息的采集與發送,而車輛仿真子系統通過以太網接口與其它子系統進行信息的發送和接收,故在車輛仿真子系統與VOBC之間增加了車載接口適配器進行轉換,屏蔽了接口差異,如圖2所示。車載接口適配器是一個進行信息轉換的仿真軟件,它既可以通過繼電器接口進行數據傳輸,也可以通過以太網接口進行數據傳輸。
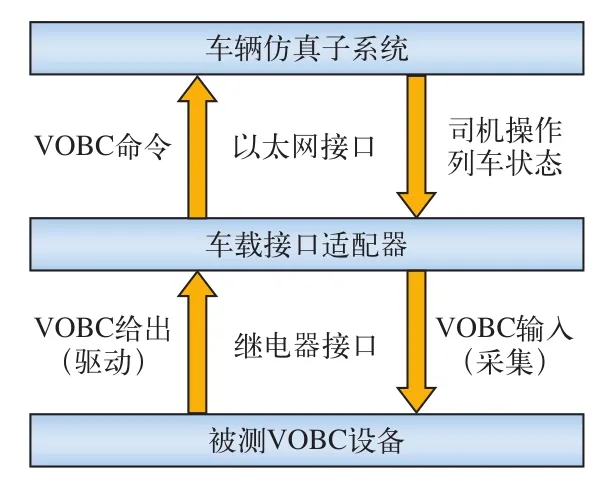
圖2 車輛仿真子系統與VOBC的通信方式
VOBC上的繼電器有兩類,即VOBC輸出繼電器(驅動繼電器)和VOBC輸入繼電器(采集繼電器),表1和表2分別列出了部分與本文研究內容相關的繼電器。
車載接口適配器通過繼電器接口采集VOBC輸出繼電器的狀態,并將其轉化為VOBC命令,通過以太網接口發送車輛仿真子系統。
車輛仿真子系統根據司機在駕駛臺上的操作以及接收到的VOBC命令進行邏輯運算,控制列車的運行,并同時將列車狀態以及司機操作通過以太網接口發送給車載接口適配器,后者再將狀態信息轉化為繼電器信息發送給VOBC輸入繼電器,從而被VOBC采集到。
VOBC根據其采集到的列車狀態信息,經過其內部運算,給出相應的VOBC輸出,而車輛仿真子系統根據VOBC命令(主要是各種使能命令)控制列車,故VOBC起到了安全防護的作用。

表1 部分驅動繼電器定義及說明

表2 部分采集繼電器定義及說明
3 常見運行場景分析
城市軌道交通中,列車常見運行場景有:緊急制動(EB ,Emergency Brake)、限制向前人工駕駛模式(RMF)、ATO自動駕駛等。本章就仿真車輛進入以上3種場景的條件進行分析,根據第2章定義的部分輸入繼電器和輸出繼電器,設計了VOBC與仿真車輛之間的交互流程。實際項目中即是通過改變各種條件來測試VOBC能否做出正確響應,只有要求的條件都滿足時,列車才能進入相應的場景。
3.1 緊急制動
涉及VOBC輸出:EBRD1,EBRD2,ZVI。
涉及VOBC輸入:EBNA。
VOBC發現列車進入故障狀態或司機按壓EB按鈕時會觸發緊急制動。列車必須在緊急制動情況下以自身最大的制動能力去實現停車,最大限度地實現列車安全[6]。VOBC實現緊急制動的流程如下:
(1)VOBC控制EBRD1=0,EBRD2=0;
(2)仿真車輛切除牽引,并輸出緊急制動,設置EBNA=0并以既定減速度減速至停車;
(3)VOBC檢測到停車后,輸出ZVI=1;
(4)VOBC檢測到EB條件不滿足后,控制EBRD1=1,EBRD2=1;
(5)仿真車輛判斷(3)、(4)條件滿足后,輸出EBNA=1,解除EB。
3.2 RMF駕駛模式選擇
涉及VOBC輸出:RM_IND。
涉及VOBC輸入:KSON,RM_PB,RMF,MCS。
RMF即正向人工限制駕駛模式,是列車運行時最常見的一種駕駛模式。列車的監控、運行、制動及開關車門由司機操作,車載設備僅對列車速度進行超速防護,當列車超過速度限制后會觸發緊急制動[7]。
圖3和圖4分別為仿真車輛側和VOBC側的控制流程圖,兩者之間信息傳輸接口在第2章已說明。
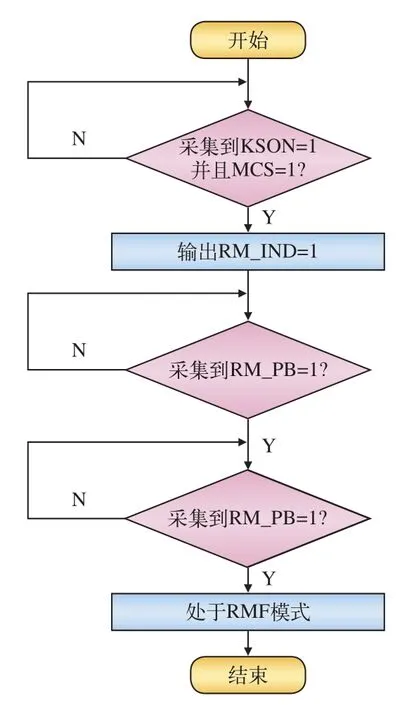
圖3 RMF駕駛模式選擇仿真車輛側控制流程圖
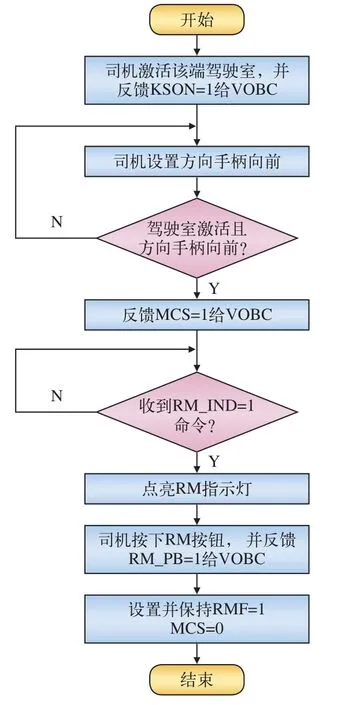
圖4 RMF駕駛模式選擇VOBC側控制流程圖
RMF駕駛模式選擇VOBC側控制流程如下:
(1)司機激活該端駕駛室,仿真車反饋KSON=1;
(2)司機方向手柄在向前位,仿真車判斷(1)、(2)條件滿足,反饋MCS=1;
(3)VOBC采集到KSON=1并且MCS=1,輸出RM_IND = 1;
(4)仿真車輛據此點亮RM指示燈;
(5)司機按下RM選擇按鈕,仿真車反饋RM_PB=1;
(6)仿真車輛設置并保持RMF = 1(即便RM_PB按鈕已復原),設置并保持MCS = 0;
(7)VOBC采集到RMF=1,并且判斷仿真車輛可進入RMF模式。
3.3 ATO運行模式
涉及VOBC輸出:ATO_IND,ATO_OP,MDR,BDR。
涉及VOBC輸入:KSON,NDC,ATO_PB。
ATO是CBTC系統的重要組成部分,屬于VOBC的非安全子系統,ATO能夠控制列車運行,實現列車自動駕駛[3]。ATO也叫AM模式,列車進入ATO模式后即無需司機操控。車載ATO子系統生成ATO控制命令,并將控制命令發送給列車,觸發列車的牽引、制動、惰行[8]。VOBC會根據目標距離動態的改變列車的牽引力,進而控制其加速度和速度,是列車進站停準停穩的重要手段。
圖5、圖6分別為VOBC側和仿真車輛側的控制流程圖。
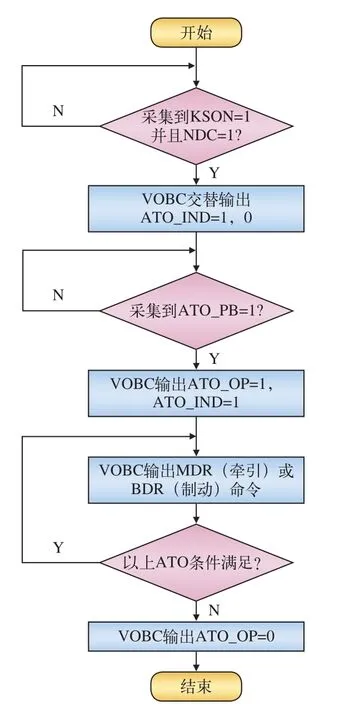
圖5 ATO模式選擇VOBC側控制流程圖
ATO模式選擇仿真車輛側控制流程如下:
(1)司機激活該端駕駛室,仿真車反饋KSON=1;
(2)司機選擇方向手柄在向前位且牽引手柄在0位,仿真車反饋NDC=1;
(3)VOBC 交替輸出 ATO_IND=1,0(1 s 方波);
(4)仿真車據此閃爍ATO指示燈;
(5)司機按壓ATO發車按鈕,仿真車反饋ATO_PB=1,該按鈕會延遲一段時間后自動復位;
(6)VOBC進入AM模式,輸出 ATO_OP=1,保持ATO_IND=1;
(7)VOBC輸出MDR或BDR牽引、制動命令;
(8)仿真車設置ATO發車指示燈常亮,并根據7條件控制列車牽引、制動運行(牽引制動力大小來自電流環);
(9)VOBC輸出ATO_OP=0;
(10)仿真車不再根據VOBC的牽引制動命令控車,退出ATO模式。
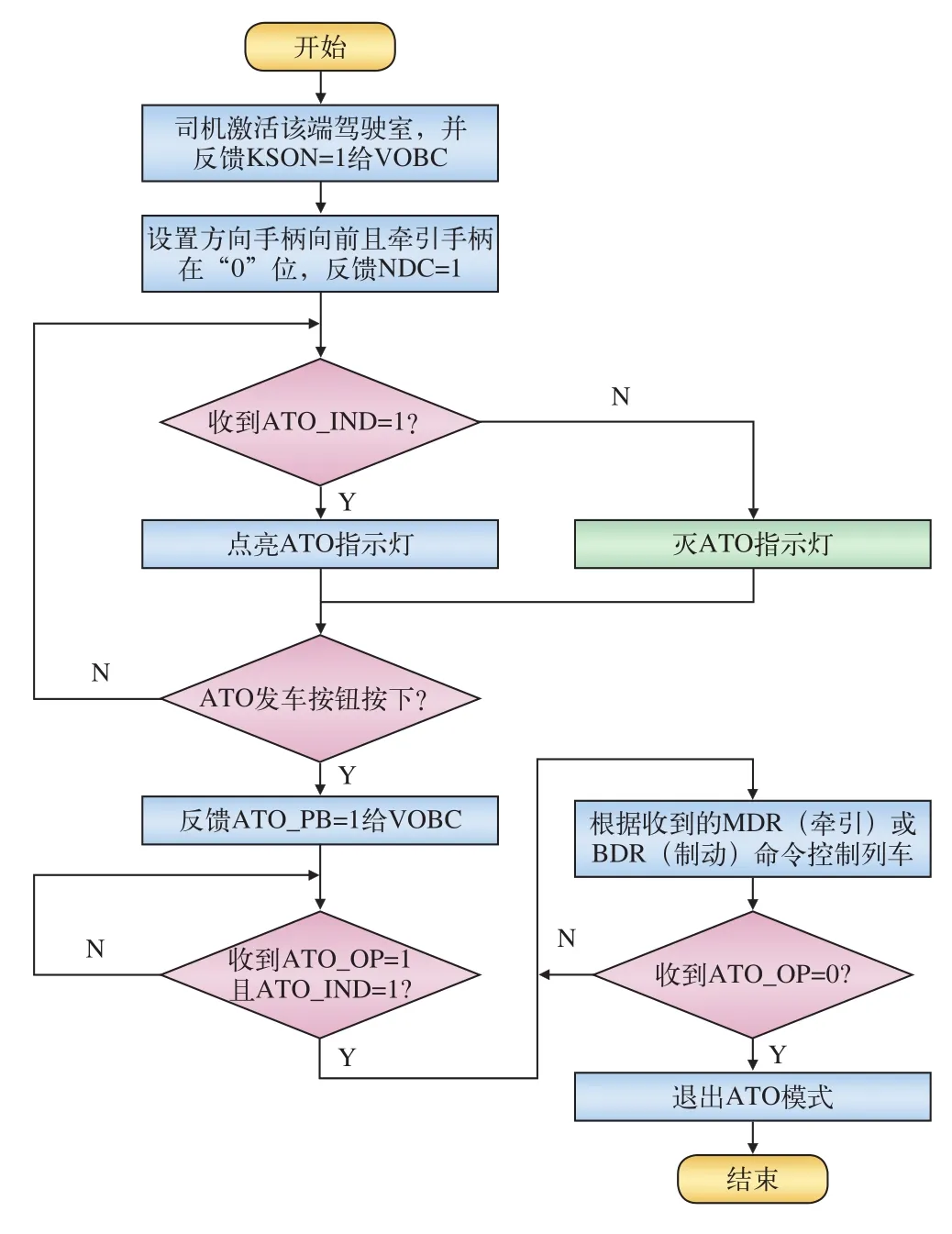
圖6 ATO模式選擇仿真車輛側控制流程圖
4 結束語
VOBC是保障列車安全運行的重要設備,因此,對于VOBC的測試也是CBTC測試平臺的一個重點。本文給出了CBTC測試平臺的架構,分析了VOBC與車輛仿真子系統的關系,針對3種常見的列車運行場景,設計了VOBC與仿真車輛的交互流程,并以此測試VOBC的控車功能。經過實際項目測驗,該設計能很好地完成對VOBC控車功能的測試。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00