一種車燈實用型LED診斷電路設計
2019-03-11 04:38:10覃思宇徐寶奇湯海蓮蔣敏
汽車零部件 2019年2期
覃思宇,徐寶奇,湯海蓮,蔣敏
(常州星宇車燈股份有限公司,江蘇常州 213022)
0 引言
LED作為一種節能、環保、高效的照明光源,已經在各個行業中應用。在汽車照明領域,車燈造型越來越多,設計方案越來越獨特,而LED光源分布靈活能滿足各種各樣的要求,因而應用也越來越廣。一般在前照燈中,轉向燈常用反射鏡或光導的方案,其中光導方案由于其光色均勻、節約空間且能做出特殊造型,得到了較大的重視。本文作者主要結合某汽車廠的設計要求,給出一種低成本的帶開路故障診斷反饋的光導型轉向燈驅動方案。
1 方案設計
針對某汽車廠一款車型的前大燈轉向燈使用光導設計,它位于前大燈下部,從左部延伸至右部。此外汽車廠還要求實現轉向燈故障反饋功能,即轉向燈功能正常時,轉向燈診斷線在100 ms內反饋高電平;轉向燈功能不正常時,轉向燈需在100 ms內反饋低電平。
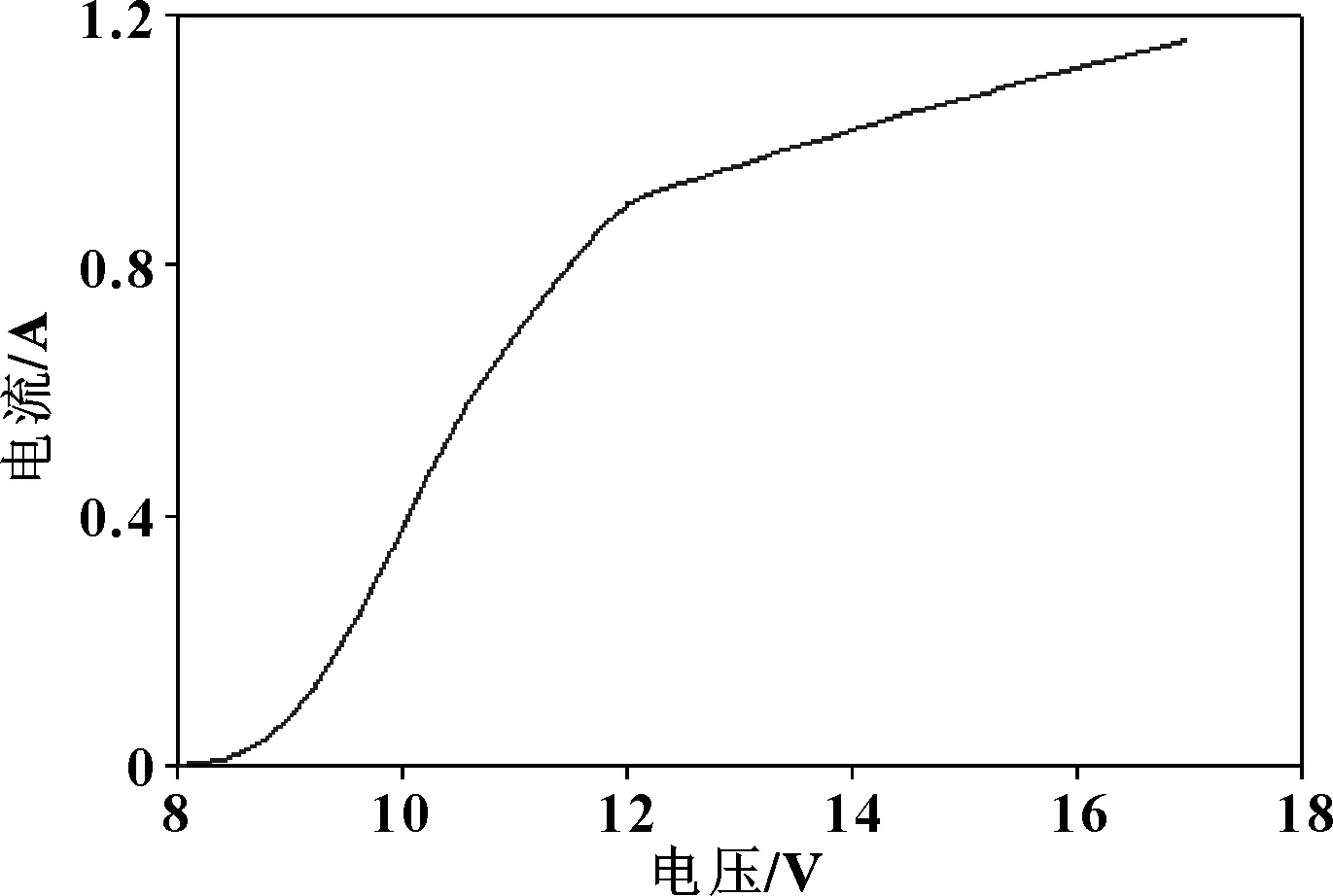
由于使用光導設計,光學上要求LED光源亮度高,因此需要光強高、功率大的LED來實現該功能。根據配光要求,LED選用3顆飛利浦luxon F Plus系列PC amber,單顆LED電流達到1 000 mA,電壓降2.98 V。表1是該款LED的一些基本參數。圖1是不同溫度下LED電壓與電流的關系。
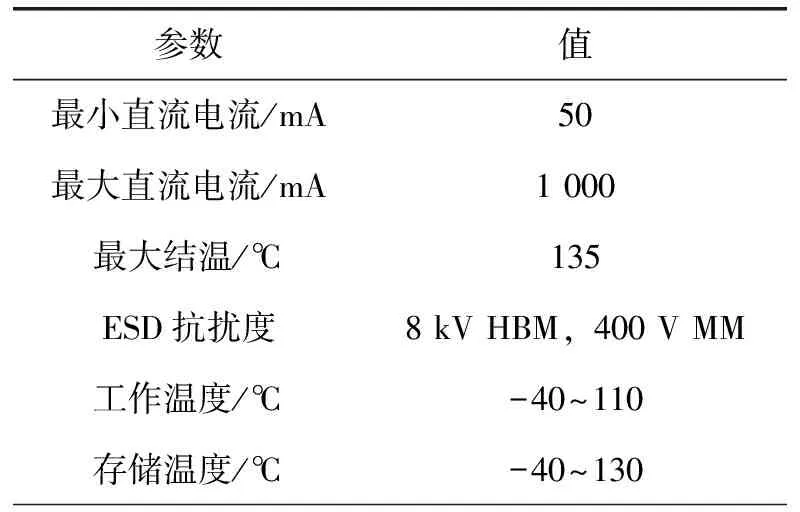
表1 某款LED基本參數

圖1 不同溫度下LED電壓與電流的關系
1.1 LED驅動方案
首先分析LED電路驅動方案。一般汽車供電源是蓄電池,則車燈的供電源為直流恒壓源,因此,車燈上常用的LED驅動方案包括電阻式驅動、恒流式驅動和開關電源驅動。
(1)電阻式驅動
圖2是電阻式驅動電路圖。LED與電阻串聯接入電路中,通過選取合適的等效電阻值控制LED串的電流,從而控制LED的光強。在這種驅動方式下,電流受電壓變化影響比較大,在9~16 V工作電壓下,明暗變化比較大,且在大電流大功率情況下,電阻數量多,占用線路板空間大。
(2)恒流式驅動
圖3是恒流式驅動電路圖。該電路利用三極管或mos管集電極和發射極間導通狀態受基級電流或電壓控制的特性,通過電阻和穩壓管給三極管或mos管基極提供穩定的電平和電流,從而保證三極管穩定的導通狀態,實現LED的恒流控制。這種驅動模式在9~16 V工作電壓下,電流相對穩定,且使用的元件數量較少,節約生產貼裝時間。

圖2 電阻式驅動電路圖
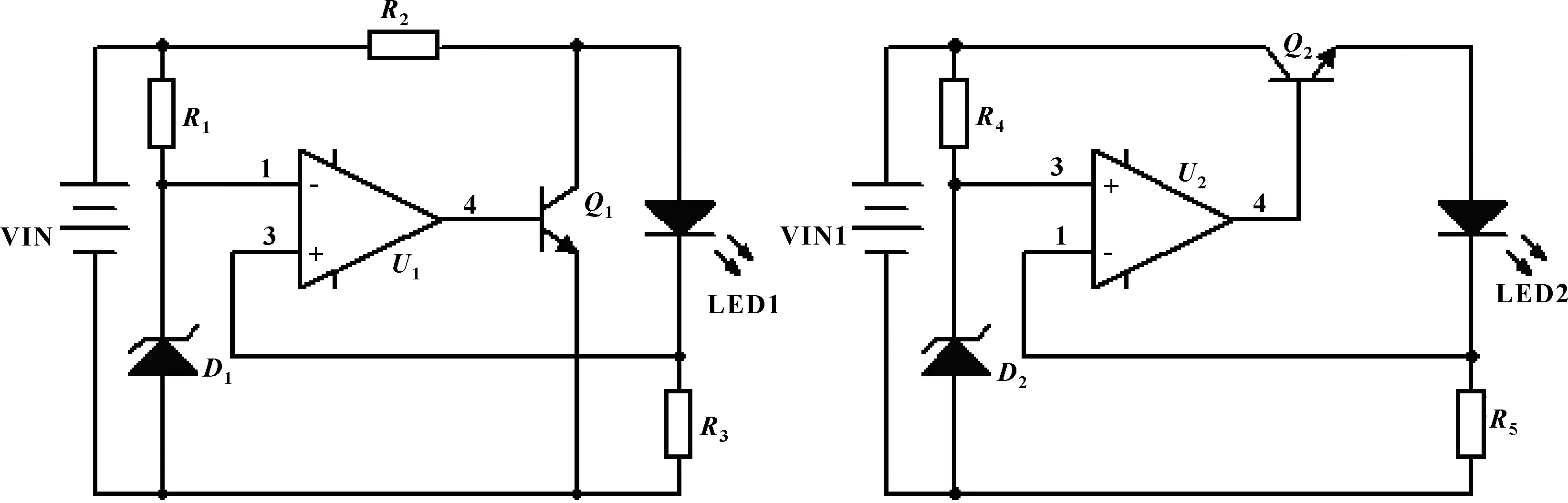
圖3 恒流式驅動電路圖
(3)開關電源驅動
開關電源驅動電路是通過電感、開關管、二極管及電容等元件的不同拓撲,將輸入電壓調整為負載所需電壓的電路。根據芯片類型和應用場合不同,分為芯片內置拓撲驅動和芯片外搭拓撲驅動,如圖4、圖5所示。
芯片外搭拓撲驅動通過利用芯片控制外搭拓撲電路的開關頻率,來控制電路的電壓和電流,這種電路感性容性元件多,且有高頻信號,容易對外產生輻射干擾,對電路走線要求高,一般需要有屏蔽措施。由于元件可選擇,因此該方案可用在負載電流大、功率大的場合。
芯片內置拓撲驅動中,芯片集成了開關電源的拓撲結構,減少了片外元件的使用,電路連接較簡單易行,且輻射干擾較小。但由于芯片本身功率有限,能驅動的LED負載功率較小。
由于芯片以及功率元件的價格較其他常規元件高,因此開關電源方案成本比較大。
在該設計中,LED電壓2.98 V,電流1 000 mA,3顆LED功率近9 W。綜合成本和功能考慮,選擇三極管恒流式方案作為LED驅動電路,如圖6所示。

圖4 芯片內置拓撲驅動
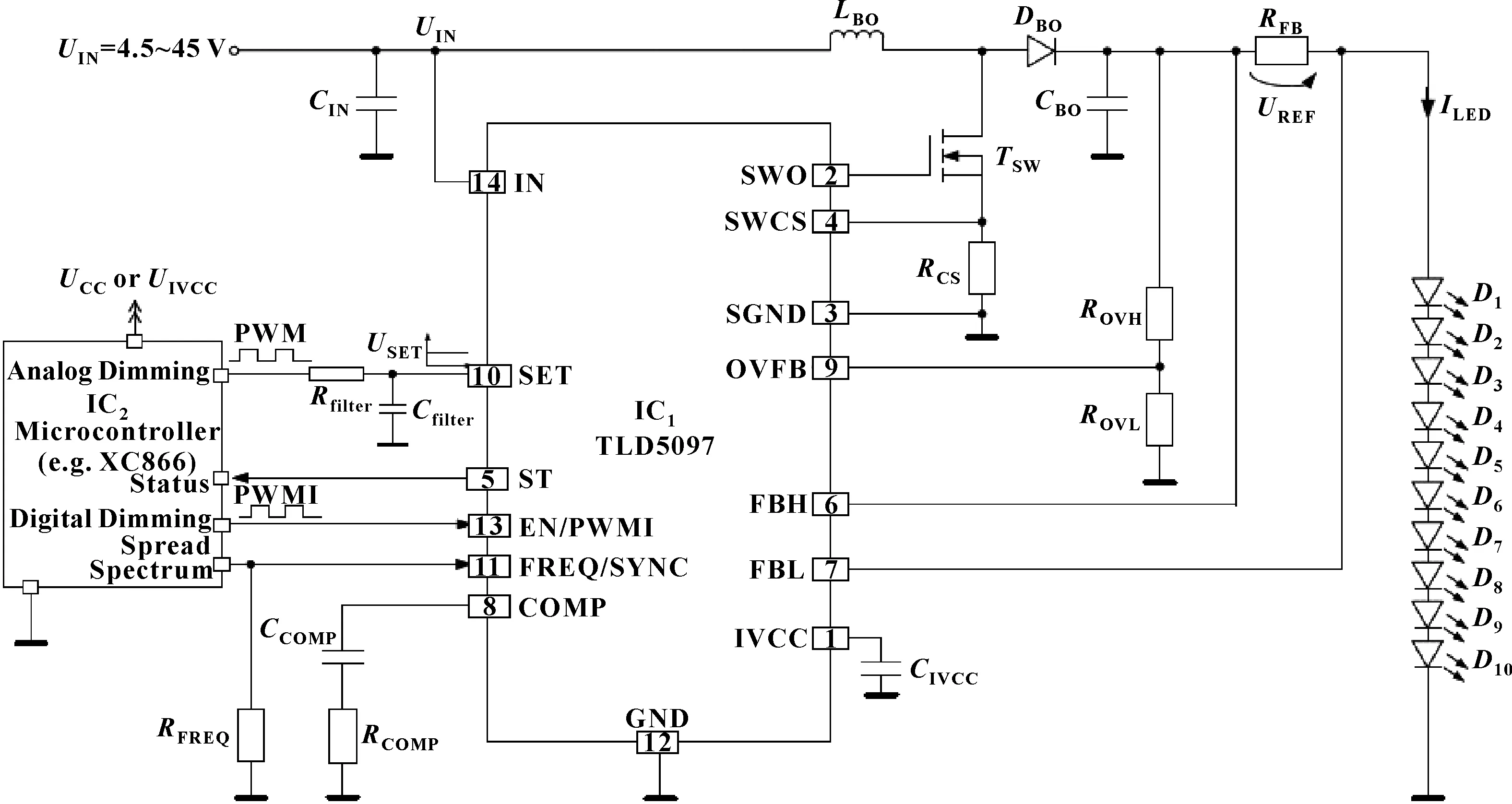
圖5 芯片外搭拓撲驅動
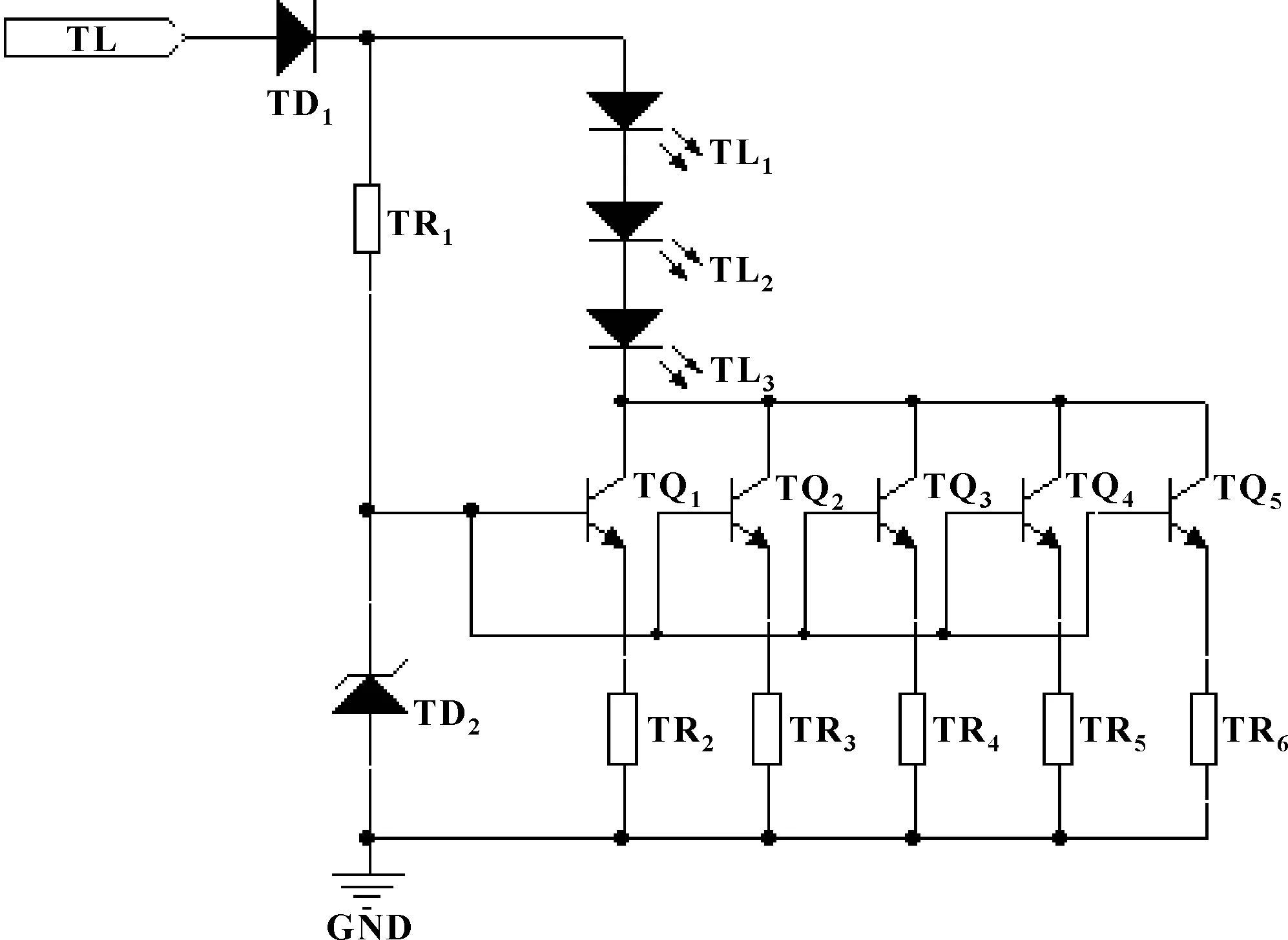
圖6 三極管恒流式LED驅動電路
1.2 診斷反饋方案
汽車廠要求轉向燈功能正常時,診斷線反饋高電平;轉向燈功能不正常時,需反饋低電平。在汽車正常工作狀態下,電源電壓13.5 V,利用如圖7所示的方案對LED工作狀況進行監控。即,當LED正常工作時,三極管Q3基極是高電平,Q3導通,使得三極管Q2基極為低電平,Q2截止,因此FeedBack端輸出高電平。反之,當LED斷路時,三極管Q3基極是低電平,Q3截止,使得三極管Q2基極為高電平,Q2導通,因此FeedBack端輸出低電平。
由于汽車工作電壓為9~16 V,當工作電壓為9 V時,不管LED是否正常工作,Q3基極始終處于低電平,這樣使得Q3處于截止狀態,FeedBack端輸出低電平,出現誤報警的情況。考慮從監控單顆LED電壓入手,使得工作電壓為9 V時不出現誤報警情況。

圖7 診斷反饋方案1
圖8是修改后的反饋方案。當LED正常工作時,根據電壓電流關系圖,工作電壓為2.5~3.3 V,此時經過運算放大電路將LED兩端電壓差值采樣出來,通過比較器與兩個基準電壓3.3和2.5 V比較。當采樣電壓介于2.5~3.3 V之間時,兩個比較器都輸出低電平,末端三極管基極為低電平,三極管截止,FeedBack輸出高電平;當LED串聯的前兩顆LED斷路時,采樣電壓為0,則電壓基準為2.5 V的比較器輸出高電平,末端三極管基極則為高電平,三極管導通,FeedBack輸出低電平;同理,當LED串聯的第三顆LED斷路時,采樣電壓大于3.3 V,則電壓基準為3.3 V的比較器輸出高電平,末端三極管基極則為高電平,三極管導通,FeedBack輸出低電平。根據以上電路邏輯實現了LED驅動電路的診斷功能,且能在9 V供電的情況下實現。
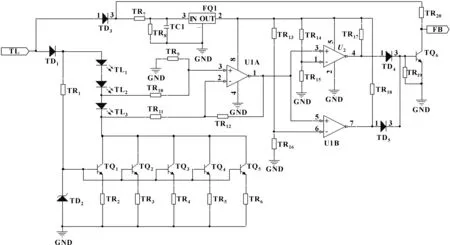
圖8 診斷反饋方案2
2 仿真驗證
文中使用Cadence中PSPice的模塊搭建原理圖電路,并分別對驅動電路模塊和反饋功能進行仿真,檢驗其可行性。圖9為電路仿真架構圖。

圖9 電路仿真架構圖
圖10為驅動電路模塊仿真結果。從圖中可看出,在工作電壓為13.5 V時,LED串聯電流達到1 000 mA,且在工作電壓范圍內,電流變化比較平穩。
圖11為反饋電路模塊仿真結果,線條1為轉向燈電源電壓信號,線條2為診斷電路反饋信號。圖11(a)中,當LED正常工作時,反饋信號跟隨轉向燈供電電壓是一個方波信號;圖11(b)中,當LED短路時,反饋信號保持低電平狀態。9 V供電情況下狀態與該結果類似。通過仿真驗證了該反饋方案是可行的。
3 結論
結合某汽車廠實際的車燈設計要求,分析比較了不同車燈LED驅動方案的特點,按功能需求的步驟給出了一種低成本的帶故障反饋的車燈LED驅動設計方案,并通過仿真驗證了電路設計方案的可行性,給其他類似功能要求的設計提供了參考。