扇形航路雷達探測式反潛巡邏機績效評估方法*
2019-03-12 02:35:14朱豐胡曉峰郭圣明姚慶鍇任遠楊璐
現代防御技術 2019年1期
朱豐,胡曉峰,郭圣明,姚慶鍇,任遠,楊璐
(1.中國人民解放軍國防大學,北京 100091;2.中國人民解放軍軍事科學院,北京 100091;3.中國人民解放軍95801部隊,北京 100843;4.海軍研究院 復雜艦船系統仿真重點實驗室,北京 100161;5.空軍工程大學防空 反導學院,陜西 西安 710051)
0 引言
在信息化聯合作戰中,完成預警探測任務的預警探測體系是作戰力量中不可或缺的重要組成部分之一。反潛巡邏機(包括旋轉翼和固定翼的反潛巡邏機)作為預警探測體系中的一項關鍵組成部分,對于完成預警探測任務起到了重要作用。特別是固定翼反潛巡邏機,由于其具有速度快、機動性強、可攜帶多種探測設備、搜潛效率高、不易被潛艇攻擊等特點,因此,對于探索、發現并持續跟蹤敵方水下潛艇起到了核心作用[1-5],從而也被各國軍隊特別是海軍部隊所重視。目前,反潛巡邏機已成為各國海軍編隊反潛作戰的重要力量,也得到了各國軍隊的重點發展。現在正在服役的反潛巡邏機主要有,美國的“獵戶座”P-3C與“北歐海盜”、英國的“獵迷”、俄羅斯的伊爾-38等,后續還要大力突破更先進的反潛巡邏機。
由此觀之,在信息化的聯合作戰戰場上,為有效奪取制海權,加強反潛巡邏機建設是毋容置疑的。那么,如何更有效地開展反潛巡邏機建設,其中一個關鍵環節就是要對其績效進行合理的評估。
目前,常用的評估方法主要包括:ADC(availability,dependability,capacity)法、層次分析法、指數法、解析法、作戰仿真模擬法和專家評估法等[6]。這些方法各具特點,也各有其適用范圍。ADC法需要擁有明確的系統構成要素和相應的性能指標,層次分析法基本離不開分析人員的主觀評估,對于分析人員評估水平依賴性較大,且其定性分析的成分較大,解析法難以處理相對獨立的效能因素,且通常計算量較大,效率不高。專家調查評估法容易受傳統思維的影響。綜合而言,這些方面要么計算復雜,不利于簡單便捷,要么主要依賴于人的因素,主觀性影響過重。因此,如何尋求相對便捷的、簡單的,且盡可能客觀的評估方法,是有待研究的重要問題。
本文就此展開了一定的研究,針對扇形航路形式下,以機載雷達探測方式來實施搜索探測的反潛巡邏機績效評估問題進行了有益探索,結合反潛巡邏機的工作特點,通過建立基于搜索區域面積和持續巡邏時間的數學模型[7],提出了一種面向反潛巡邏機績效評估的新方法。該方法通過對搜索區域面積和持續巡邏時間進行概略評估,從而達到簡單、便捷的效果。同時,該方法是基于計算解析的方法,因此,可客觀、合理、高效地實現反潛巡邏機績效評估。最后,本文給出了一個實驗案例來驗證本文所提方法的有效性。
1 反潛巡邏機的工作特點
反潛巡邏機包括岸基和艦基2種,它們在執行巡邏任務時,其機載雷達的主要功能都是對在潛望鏡、通氣管狀態的潛艇進行搜索、識別和跟蹤。這種機載雷達對潛艇的搜索主要是對大面積海域進行巡邏搜索,因為無論是核潛艇還是常規潛艇都要定期浮出水面,例如①常規潛艇使用柴油機航行時,必須要伸出通氣管;②潛艇進行天體定位時,必須浮出水面;③潛艇與基地進行無線電通信時,需要伸出天線;④受水下環境影響,活動深度受到限制時,不得不上浮或呈半潛狀態;⑤潛艇對艦船目標進行瞄準攻擊時,必須伸出雷達天線或呈潛望鏡。可以說,潛艇的這種活動規律為雷達探測創造了條件[8-12]。
通常,岸基反潛巡邏機、艦基反潛巡邏機分別在陸基機場中和在艦船上會根據預先指定的巡邏任務配好裝備和補給。當領受到開始執行巡邏任務時,岸基反潛巡邏機從陸地上起飛,艦基反潛巡邏機從艦船上起飛,經過一段時間的航行到達指定的巡邏區域,然后在巡邏區域內執行巡邏搜索任務。當指定的巡邏時間期限已滿,或根據上級的返航指揮命令,即按指定航線返航。這個過程如圖1所示。
反潛巡邏機在巡邏區域中巡邏時的工作方式主要從2方面來探討。
一是其航路形式,通常有:平行航線式、擴展式和扇形形式等。其中,扇形航路形式是反潛巡邏機特別常見的一種典型的工作方式,由此,本文就扇形形式進行具體探討分析,航路示意圖如圖2所示。
假設P1P9P10為待搜索等邊三角形區域,飛機從A點起飛,在B點進入準備搜索階段,并轉彎進入到C點,由C點直飛到D點(C,D點間距離很近可忽略不計),再由D點轉彎180°到P1點。從P1開始進入檢查搜潛階段,P1到P2為直飛過程,P2到P3為順時針轉彎過程,P3到P4為直飛過程,P4到P5為逆時針轉彎過程,P5到P6為直飛過程,P6到P7為順時針轉彎過程,然后依次往后搜索,直至搜索完畢。
反潛巡邏機一般在指定巡邏線(或巡邏區域)上搜索。巡邏線既可以是固定不動的,也可以是相對固定的。
二是其探測搜索方式,可利用目視觀察、雷達探測[13],也可使用聲吶浮標、吊放聲吶、磁異探測儀以及紅外探測儀、廢氣探測儀、電場分析儀、激光探測儀等來搜索潛艇[14]。其中,雷達探測是一種非常重要的方式,因此,本文就雷達探測方式展開研究[15]。
通常,裝備在反潛巡邏機上用來搜索探測目標的雷達,即為機載雷達,通過向海面的俯視(需要一定的視軸俯角)來完成對潛艇的搜索探測,機載雷達探測的幾何模型如圖3所示。
當反潛巡邏機飛行高度h、雷達視軸俯角θ一定時,在確定的垂直波束角θr下,感知環寬度ρ是反潛巡邏機空間狀態的函數,如式(1)所示,其幾何關系如圖4所示意。
ρ=f(h,θ,θr),
(1)
式中:雷達垂直波束角θr在反潛巡邏機飛行高度h和雷達視軸俯角θ一定時,由l01和l02決定;f(·)為非線性函數。
2 反潛巡邏機績效評估方法
依據反潛巡邏機的工作原理,假設每架反潛巡邏機的最大航程均為Lkm,則該航程可拆分為
L=L0+LW+LZ+LB,
(2)
式中:L0為反潛巡邏機從起飛處到搜索區域之間經過的往返路程,該路程過長,可能會影響反潛巡邏機偵察搜索效能的發揮程度,因此,應根據實際作戰需要酌情考慮;LW為M條彎道路徑的總長度(M≥2);LZ為N條直線路徑的總長度;LB為從搜索結束點返回到搜索起始點的路程,它們的單位均為km,分別滿足
LW=πMR,
(3)
(4)
(5)
式中:M≥N,一般情況下,M=N+1;R為轉彎半徑,
圖1 反潛巡邏機執行巡邏任務示意圖Fig.1 Sketch of performance of antisubmarine patrol aircraft executing patrol mission
單位為km,其滿足如下公式
圖2 載有探測雷達的反潛巡邏機在巡邏區域內的扇形航路示意圖Fig.2 Sketch of sector airway of antisubmarine patrol aircraft with detected radar in patrol area
圖3 反潛巡邏機機載雷達感知環示意圖Fig.3 Sketch of radar awareness ring of antisubmarine patrol aircraft
圖4 反潛巡邏機機載雷達感知環俯視示意圖Fig.4 Sketch of overlooking radar awareness ring of antisubmarine patrol aircraft
(6)
式中:g為重力加速度,g=9.8 m/s2=127 008 km/h2;v為反潛巡邏機的航行速度,單位為km/h;ω為反潛巡邏機轉彎角速度,通常是個定值。
由此,在反潛巡邏機執行偵察巡邏任務時往返飛行的到達路徑長度L0和轉彎半徑R(即與航行速度和轉彎角速度有關)一定的條件下,可以得到關于反潛巡邏機最大航程L與彎道路徑條數M或與直線路徑條數N的函數關系。
進一步可以推導出,考慮到反潛巡邏機機載雷達感知環還有一定的面積,因此,每架反潛巡邏機沿航路飛行時的搜索區域面積Ss(單位:km2),可用如下公式近似表達,并如圖5所示(圖中若干綠色曲線表示不同時刻下反潛巡邏機機載雷達的感知外界,黑色虛線圍成的區域即為反潛巡邏機沿航路飛行時的整個搜索區域)。通常,反潛巡邏機彎道飛行的轉彎半徑R小于等于反潛巡邏機在水平面上的投影到機載雷達感知環最外邊界的距離r02,本文就此情況展開論述分析。
圖5 反潛巡邏機沿航路飛行時近似的搜索區域示意圖Fig.5 Sketch of approximate search area ofantisubmarine patrol aircraft flyingalone the airway
Ss=S0+S1,
(7)
式中:S0(單位:km2)為反潛巡邏機飛行航跡所圍成的區域面積,這些面積都是反潛巡邏機的搜索面積,其滿足
(8)
而S1(單位:km2)則為反潛巡邏機在飛行航跡所圍成的區域面積之外,由機載雷達感知所擴充的近似搜索面積,其計算如下:
(9)
因此,可獲得近似的搜索區域面積為
(10)
通過如上幾個公式,可以建立起每架反潛巡邏機執行偵察巡邏任務時其所顧及到的搜索區域面積Ss與最大航程L之間的相互關系。
假設反潛巡邏機執行偵察巡邏任務計劃要完成搜索的總區域面積為Skm2,則從搜索面積角度來看,共需要反潛巡邏機的架數JS為

(11)
式中:「·?表示向正無窮大取整數;α為搜索面積重疊因子,可取α∈[0,1],通常α>0.5。
這是因為任意2架不同的反潛巡邏機在執行偵察巡邏任務時,其各自負責的搜索區域之間要有一定的重疊,一方面,搜索區域形狀為扇形,難以將所計劃的全部搜索區域依扇形進行嚴格的分割;另一方面,在搜索時,有一定的重疊區域也可進一步降低搜索漏警率,更加確保搜索質量;向正無窮大取整數的目的是執行任務時對反潛巡邏機數量的要求秉著“寧多勿少”的原則,特別是計算出的結果為小數時,要取更大一級的整數,確保執行偵察巡邏任務的反潛巡邏機數量足夠。
再假設偵察巡邏任務要反潛巡邏機每日的持續巡邏時間為T,反潛巡邏機每日的起飛批次為n次/日,則從持續巡邏時間角度來看,共需要反潛巡邏機的架數JT為
(12)
式中:「·?表示向正無窮大取整數;β為巡邏時間重疊因子,與α類似,可取β∈[0,1],通常β>0.5。分析其中的緣由,與前文分析從搜索面積角度來看共需要反潛巡邏機架數JS的情況一致;T0為反潛巡邏機執行偵察巡邏任務時的持續巡邏時間,單位為h,可通過如下公式計算得到
(13)
綜合上述2個分析角度,可以得出為完成偵察巡邏任務,共需反潛巡邏機的總架數J為
J=JSJT.
(14)
需要說明的是:文中的許多等號可能并非是嚴格的等號,嚴格意義上講,應該為約等號,但由于本文提出的基于等效面積的反潛巡邏機績效評估方法是個概略計算的方法,并不追求過多的精確性,因此,文中將其進行簡化,統一使用等號處理以便于表達和計算。
依據本文所述內容,本文提出的反潛巡邏機績效評估方法流程圖如圖6所示。
圖6 反潛巡邏機績效評估方法流程圖Fig.6 Flow chart of performance assessment method of antisubmarine patrol aircraft
3 案例分析
依據文獻[6-9,15]中的仿真實驗參數,假設反潛巡邏機的最大航程L為1 000 km,航行速度v為320 km/h,飛行高度h為300 m,視軸俯角為20°,l01=0.560 0 km,l02=1.612 0 km,可知其在水平面上的投影到機載雷達感知環最外邊界的距離r02=1.588 0 km,假設反潛巡邏機在彎道飛行時的轉彎角速度ω為30°,則根據本文所述公式可以計算得到其轉彎半徑為R=1.396 5 km。
同時,按照本文方法,還可獲得每架反潛巡邏機所顧及到的搜索區域面積Ss、持續巡邏時間T0分別與最大航程L之間的相互關系圖如圖7所示,其中假設往返路程L0為100 km,此時假設反潛巡邏機為岸基的。從圖中可以看出,本文實驗案例中單架反潛巡邏機所顧及到的搜索區域面積Ss為2 198.45 km2,持續巡邏時間T0為2.812 5 h。
假設反潛巡邏機計劃搜索區域的總面積S為15 000 km2,每日24 h全天時巡邏,即T=24,每日的起飛批次n為2次/日,取α=0.8,β=0.8,則計算出JS=9,JT=6,由此得到共需反潛巡邏機的總架數J為54架,如圖8a)所示意。
進一步地,將岸基反潛巡邏機改為艦基的,往返路程L0可記為0 km,由此可獲得每架反潛巡邏機所顧及到的搜索區域面積Ss、持續巡邏時間T0分別與最大航程L之間的相互關系圖如圖9所示。從圖中可以看出,本文實驗案例中單架反潛巡邏機所顧及到的搜索區域面積S0為2 458.79 km2、持續巡邏時間T0為3.125 0 h。則可進一步計算出JS=8,JT=5,由此得到共需反潛巡邏機的總架數J為40架,如圖8b)所示意,其他實驗參數均與岸基情況時的參數一致。
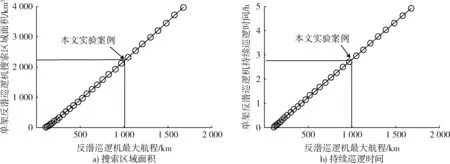
圖7 岸基單架反潛巡邏機最大航程與相關性能間的相互關系曲線圖Fig.7 Curve of correlation between the maximum voyage and relevant attributions of single land based antisubmarine patrol aircraft
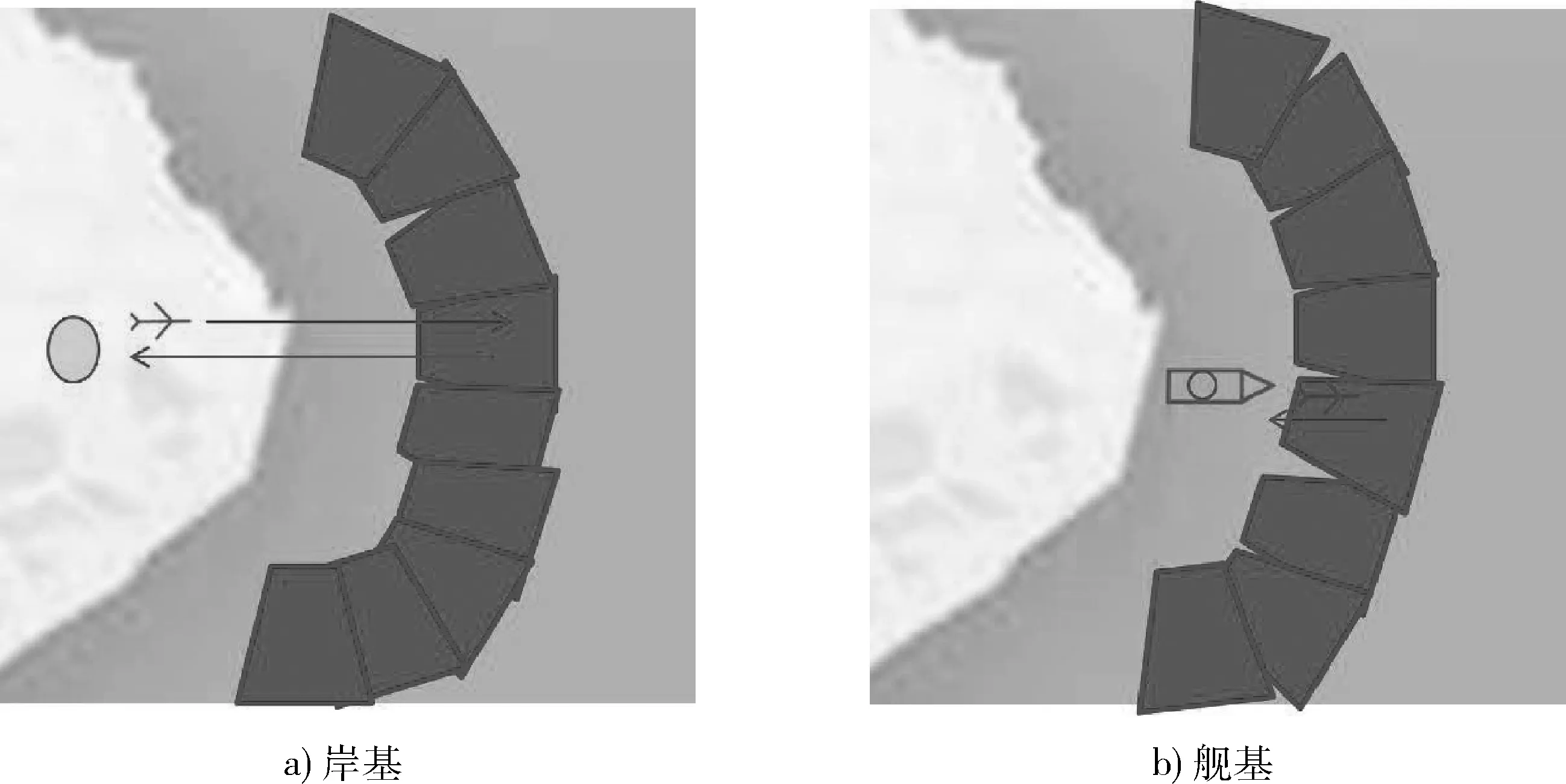
圖8 反潛巡邏機績效評估結果示意圖Fig.8 Sketch of performance assessment results of antisubmarine patrol aircraft
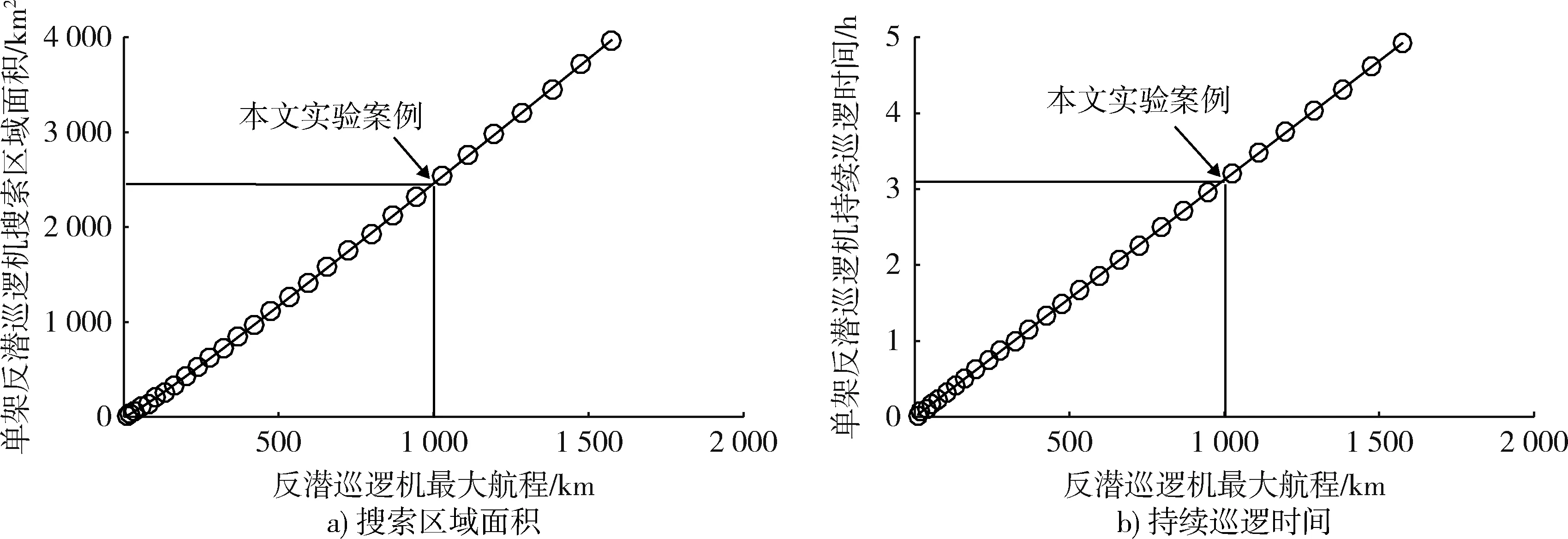
圖9 艦基單架反潛巡邏機最大航程與相關性能間的相互關系曲線圖Fig.9 Curve of correlation between the maximum voyage and relevant attributions of single ship based antisubmarine patrol aircraft
從岸基反潛巡邏機與艦基反潛巡邏機的績效評估結果來看,艦基的情況比岸基在其需要54架的條件下要少需要14架反潛巡邏機,少需要25.93%,這主要是由于艦基的情況是反潛巡邏機在海上直接起飛出發,從而減少了往返的路程,這是符合實際情況的。因此,可作為結果依據供軍事指揮和研究人員參考。同時,這個實驗案例也驗證了本文所提方法的有效性。
4 結束語
本文著眼于當今重要的軍事需求,針對反潛巡邏機績效評估問題展開了一定的研究工作。在論述分析了反潛巡邏機(包括岸基和艦基2種)工作特點的基礎上,結合相關內容,建立了合理的數學模型,提出了一種面向扇形航路形式和機載雷達探測方式的反潛巡邏機績效評估新方法。該方法通過對搜索區域面積和持續巡邏時間進行概略評估,從而達到了簡單、便捷的效果,可客觀、合理、高效地實現一定的反潛巡邏機績效評估。實驗案例不僅驗證了本文所提方法的有效性,而且表明在本文實驗條件下,艦基反潛巡邏機的需要情況比岸基的(需要54架)要少14架,少需要25.93%,這個結果可作為結果依據供軍事指揮和研究人員參考。本文工作可為研究如何評估作戰體系、系統等的作戰效能問題提供理論和技術支持,也可為其他評估問題的研究突破提供新的思路和方法。所開展的相關研究工作仍在不斷的深入和逐步拓展。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52