船舶“端點”在港內受限水域中的重要應用
2019-03-12 22:39:58陳春洪
珠江水運 2019年3期
關鍵詞:船舶
陳春洪
摘 要:世界航運正在向船舶大型化發展,相比較而言,港口水域就顯得越來越狹小,尤其是進入泊位附近,船舶操縱時更是需要謹慎駕駛,近距離接近碼頭或者物標時,大盲區在船舶引領過程中會給駕引人員造成特別大的心理壓力。本文提出“端點”“視覺端點”和“視覺端點線”等新概念,并探討在受限水域內船舶靠離泊時船舶端點、視覺端點的應用,為駕引人員在港內受限水域中的操縱,尤其是掉頭靠泊、離泊的安全操作提供參考。
關鍵詞:端點 船舶 受限水域
引航屬于以專業技術提供社會服務的行業,是船舶進出港口重要的技術保障,代表了一個國家港口服務能力海運發展的綜合水平。船舶進出港口、靠離碼頭是船舶航行中最為復雜的工作之一。由于港口水域有限,航道通行密度大,海域情況復雜,且船舶體積大、慣性大,泊位與泊位之間距離緊湊,造成船舶靠離泊控制困難,對引航技術也提出更高的要求。
筆者通過多年在港內受限水域內引領船舶航行及靠離泊操縱,提出“端點”這個新概念,并總結出端點在實際操船中的應用,不僅對普通船型的駕引工作可以做到得心應手,對于盲區大的現代化大型船舶更是能夠做到保障其安全,具有很強的借鑒、指導意義,供駕引人員參考。
本文中,當講述船尾時,不僅僅以船尾特例,船頭不做累述。
1.端點的定義
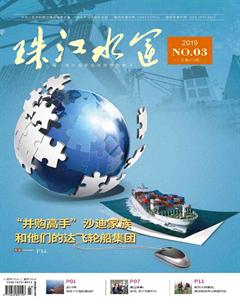
端點是指當船舶一端甩向某一物標時,船舶距離物標在水平面上的最近點,分為前端點和后端點。如船舶在離泊調頭時,一端甩離碼頭,則稱前端點;另外一端則反向甩向碼頭,稱后端點。如圖1所示。
船舶在海上航行,因可航水域寬闊,因此,即使是超大型船舶,駕駛員也僅僅關注船位點等信息,而忽略船舶自身長度與寬度等的影響。但在狹窄水道內尤其是靠離碼頭時,因空間極為有限,在操縱過程中駕引人員必須極其謹慎,絕不能忽略船舶的空間尺度,并時刻關注船頭、船尾、船底、船舷、凈空高點等與礙航、碼頭、橋吊、他船等的相對位置,以免發生碰撞。這些有可能發生任何碰撞的船舶位置,即為船舶的端點。
2.掌握客觀資料
2.1查閱本船的引航卡(Pilot Card)和船舶資料卡(Ships Particulars)。第一,從中獲得船舶駕駛臺到船頭和船尾的距離,掌握好這兩個客觀距離,即表示了有了控制好船位的基礎,才可能精確地讓端點與碼頭保持所需的距離;第二,獲得本船船頭、船尾的造型結構細節。
2.2通過查閱前后靠泊船舶船寬。
利用ECDIS、WEB互聯網、雷達、AIS等導航系統,查閱該船的船寬,以此數據作為客觀衡量標準,用其外檔船舷線作為本船判斷、衡量本船駕駛臺(即引航員站立位置)距離碼頭的趨勢和距離。
若泊位無其他船舶靠泊時,利用其他助航標志如橋吊、浮筒、串標等,方法不變,依然可以找到為判斷、衡量距離碼頭的趨勢和距離。
2.3碼頭“條紋”。
因為各碼頭等級不同,纜樁距離、碰墊距離都不一樣,為了便于核算距離,廈門港所有泊位每隔20米都用紅白油漆做了統一長度的標記。如圖2所示。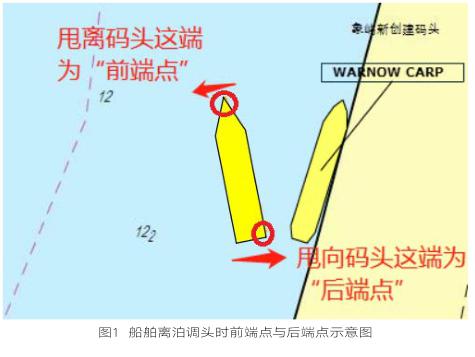
3.船舶端點確認法
船舶靠離碼頭時,船長及引航員最關心的是船舶與碼頭間的距離,隨著船舶大型化,船舶盲區越來越多大,船舶端點與碼頭距離的判斷就顯得尤其重要。筆者通過不斷地實際操縱,總結出以下十種方法:
3.1登輪前觀察法
離泊時,以確定船尾后端點方法為例,如采用圖1所示的船舶離泊方法,本船向左掉頭,船尾的結構一般為內收弧度,如圖3所示,引航員登輪前,需要認真觀察離泊船的造型結構、配載情況、吃水、潮高、碼頭高度等,并做到心中有數,可預推斷出船尾的后端點;抵達駕駛臺后,需要核實所觀測的情況,以確認船尾后端點。船頭前端點同理。
進港時,當引航艇從海面上接近被引船時,同樣需要認真觀察船舶造型結構、配載情況、吃水等,從而進行相應預判。
這兩種預判,除經驗之外,還需要在登輪后查閱引航卡和船舶資料卡,進行更精確的判斷。
3.2纜樁位置判斷法
如圖2所示,纜樁是指岸邊設置的系纜樁,用來供停船時拴纜繩。以船尾為例,目測找到船尾的尾纜纜樁和尾倒纜樁,它們的中心點可作為尾端點,為增加閾值,也可以直接把尾纜纜樁的位置當成是尾端點;如果是尋找船頭的前端點,方法相同。
3.3拖輪協助法
拖輪在端點旁側協作時,拖輪駕駛員可以從旁側觀察到端點距離物標的距離,引航人員可咨詢拖輪駕駛員,反推本船端點的位置。
3.4值班駕駛員協助法
本船值班駕駛員一直站在端點位置觀察安全距離、動態等,相比駕駛臺位置,相對會更直觀明了,引航員在操作時可直接進行咨詢核對。
其中方法3.4比方法3.3更有優勢的是:第一,本船值班駕駛員可以報告動態,即船舶在離泊時是遠離碼頭還是接近碼頭;第二,本船駕駛員站立的位置幾乎就是端點,而拖輪駕駛員則相距甚遠。
但兩種方法都具有不精確因素,即不論拖輪駕駛員還是本船駕駛員,都存在目測距離能力的誤差,因此這兩種方法只能作為參考。
3.5計算法
計算法主要是數纜樁的個數和條紋的條數。例如,未離泊時,站在駕駛臺一側,先找出駕駛臺對應碼頭上的點,然后根據本船駕駛臺距離船頭的距離和距離船尾的距離:第一,如果碼頭的纜樁距離固定且清楚,如圖2所示,直接計算反推出前端點及后端點的位置;第二,也可通過碼頭條紋數判斷,如圖2所示,即一旦船舶稍微離開碼頭,就可以觀察到碼頭上的20米紅白條紋或者黃黑條紋,計算條紋數目,反推計算出前端點及后端點的位置。此方法的缺點是,船舶若離開泊位太遠,則失去本船和計算端點進行對比的最佳時機,距離越遠,誤差會越大。
3.6日照陰影法
陽光照射,會直接照射出本船在海面上的陰影,簡單直接,如圖4所示,其缺點是,日照陰影會隨著太陽高度和照射方位的變化而變化,且變化比較大,尤其是陽光從正上方照射時,駕駛員站在駕駛臺,是看不見陰影的;陰雨天和太陽落山后,此辦法就失效;此外,使用日照陰影法時,要充分考慮船頭的造型結構,并作出相應的微調整。
3.7側推器排出流法
側推器是指一種助船轉向的裝置,一般設于船首部橫向管道內,由電動機帶動的螺旋槳,能將一舷的水排向另一舷,借助水的反作用力幫助船舶轉向。在側推器使用中,會在水面上形成明顯的排出流,此排出流的波紋與船舷交接點,即可參考作為端點。因為潮汐和流壓,波紋會被明顯的抑制到下流一側,應用時應增加其闕值。
船舶大小側推器的位置距離船首柱距離不盡相同,大型船舶大些,大致10米至40米之間,可以通過船舶布置圖查閱。
3.8激光測距法
激光測距儀是利用調制激光的某個參數實現對目標距離進行測量的儀器。激光測距儀測量范圍一般為3.5~5000米。
按照測距方法分為相位法測距儀和脈沖法測距儀,脈沖式激光測距儀是在工作時向目標射出一束或一序列短暫的脈沖激光束,由光電元件接收目標反射的激光束,計時器測定激光束從發射到接收的時間,計算出從觀測者到目標的距離。相位法激光測距儀是利用檢測發射光和反射光在空間中傳播時發生的相位差來檢測距離的。激光測距儀重量輕、體積小、操作簡單速度快而準確,其誤差僅為其它光學測距儀的五分之一到數百分之一。
3.9桅燈陰影法
桅燈是安置在船的首尾中心線上方,高出其他燈光,并從船正前方向每一舷正橫后22.5°內,在225°的水平光弧內顯示不間斷燈光的白燈。對于引航員日常工作所引領的被引船而言,前桅燈設置在船體以上的高度不必大于12米。
船舶在海上航行時,由于海面受到風浪影響,尤其是有浪花存在時,桅燈光線所產生的船舶陰影不容易被看見。而港內水域海平面相對平靜,易于光線反射,尤其是靠泊時,船頭的甲板工作燈打開,增加亮度,導致桅燈光線照射在船體而產生的水面上的陰影更加明顯。
3.10雷達法
雷達Radar,無線電探測和測距,即用無線電的方法發現目標并測定它們的空間位置,因此雷達也被稱為“無線電定位”。雷達是發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位等信息。用雷達法確定船舶前端點和后端點,首先需要知道駕駛臺距離船頭及船尾的距離,如駕駛臺距離船頭185米,在雷達上設定距標圈0.1海里,該距標圈與船首向的交點即為船舶的前端點。如圖5所示。
雷達法的優點是白天黑夜均能探測遠距離的目標,且不受霧、云和雨的阻擋,具有全天候、全天時的特點,并有一定的穿透能力。
4.端點判斷方法匯總與比較
上述10種端點判斷方法優缺點比較如表1。
5.端點的直接拓展應用
5.1視覺端點
視覺端點定義為,端點和駕駛員眼睛的連線交于本船視覺可見物體的水平面,該交點即為視覺端點,如圖7所示。
5.2視覺端點線
視覺端點線的定義為:兩船舷視覺端點的連線,即為視覺端點連線,如圖4、圖7所示。
端點的直接拓展應用:就是找到端點后,駕引人員通過視覺感官清晰掃描、精準找到“視覺端點”和“視覺端點線”。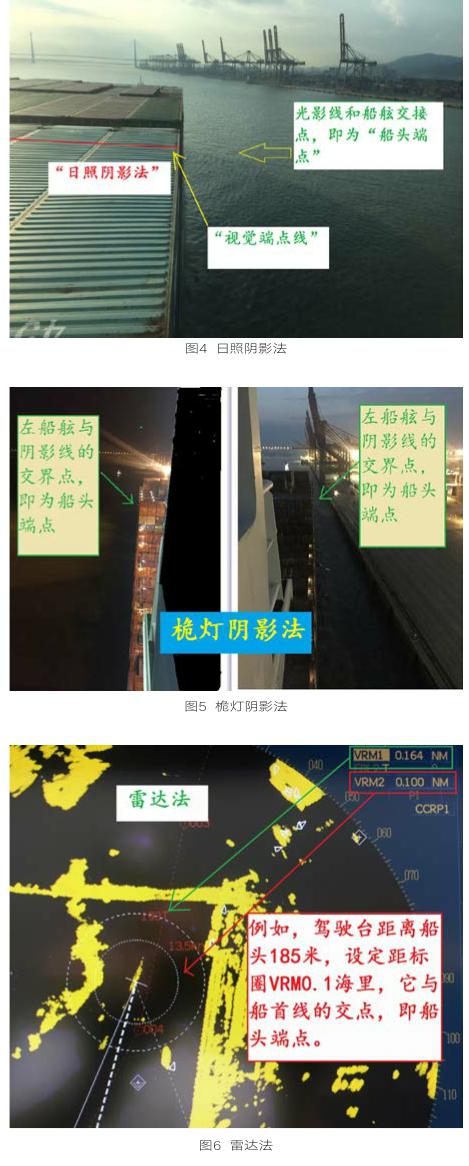
通俗地講,就是視覺直觀地找到本船的船頭或船尾,尤其是在操縱超大型船舶時,這對于盲區所造成的心理壓力會大大減輕。
6.端點的其他應用意義
6.1精確端點與碼頭之間安全距離控制
靠泊、離泊是船舶航行中操縱頻繁、氣氛凝重、險象環生的一段旅程,最重要的安全環節就是防止碰撞碼頭或者碼頭設施,通過精確端點與碼頭之間安全距離,控制安全閾值,提高靠離泊安全性。
6.2精確本船船位
在需要掉頭的引領過程中,掌握本船前后端點與掉頭區邊界線的距離,即可充分掌握本船位。由于一般港內掉頭區水域有限,當船舶未動時,轉心在船中,而當船舶有速度,轉心就會往前進的方向移動。隨著轉心的變動,一則拖輪頂推、拖拽的力臂就會改變;二則本船往碼頭甩的一端的力臂增長。為防止碰撞碼頭,此時利用端點就能夠較好地防止碰撞發生,這對于大型船舶和重載船舶尤其重要,尤其是風大流急時。船位的控制,意味著安全保障。
6.3協助避碰、避讓,防止擱淺
由于港內可航水域面積有限,幾乎都是近距離避讓,當近距離有小漁船接近,或者當避讓浮筒、物標、礙航物時,都可以利用端點判斷是否需要采取進一步措施,以及是否能夠清爽。
6.4為下一步操縱做好精準判斷
一切操縱手段的采取,都必須是建立在正確的、精確的判斷上,越是精確的手段,越能夠為下一步的操縱打好堅實的基礎,相反,很多碰撞事故都是由于憑感覺判斷,再采取所謂正確的操縱而導致碰撞事故的發生。此外,對拖輪的使用,利用端點知識的操縱總結,引導引航員在操作中,對拖輪在頂、推、解纜的時機上進行精確把握。
本文提出端點、視覺端點新概念,并對端點進行詳細的解析,從而進一步找到視覺端點。端點包含了船頭和船尾的最長點,但船頭和船尾的最長點不一定就是端點,端點的確認方法涵蓋內容多,可應用于不同的天氣、不同的光線、不同的地點、不同的船型,具有普遍意義。隨著船舶大型化的發展,船頭、船尾盲區也越來越大,應用端點能直接克服盲區所造成的駕引人員心理恐懼,又是在港內受限水域,對駕引人員實操具有很好的借鑒意義。當然,諸多的端點確認方法需要駕引人員在實操中不斷反復練習、總結和修正。
參考文獻:
[1]古文賢.船舶操縱[M].大連海運學院出版社,1993.
[2]陸志材,王逢辰.船舶操縱[M].大連:大連海事大學出版社,2001.
[3]洪碧光.船舶操縱原理與技術[M],2007.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30