剛度可調結構在直升機減振上的應用研究
2019-03-12 07:49:29林長亮夏雙滿張體磊孫秀文朱躍法
振動工程學報 2019年6期
林長亮 夏雙滿 張體磊 孫秀文 朱躍法
摘要:直升機振動問題一直困擾著直升機的研制與使用。雖然解決直升機振動問題的方法有很多,但對于現役機型,由于結構空間和更改范圍的限制,常規吸振器和主動減振技術都難以適用。針對某型現役直升機機體振動問題,提出了剛度可調的設計思想,用以消除制造偏差對局部結構頻率、振型的影響,從而達到減振目的。通過仿真分析、地面激振試驗和飛行振動測試,驗證了剛度可調結構能顯著降低機體振動水平,對于直升機振動水平控制研究具有參考價值。
關鍵詞:減振;直升機振動;剛度可調結構;模態分析
中圖分類號:TB535+1;V275+1
文獻標志碼:A
文章編號:1004-4523 (2019) 06-0950-06
DOI:10. 16385/j. cnki. issn. 1004-4523. 2019. 06. 003
前言
所有飛行器中直升機的振動最為嚴重,過大的機體振動不僅使駕駛員感到不適、易于疲勞,造成操作失誤,影響飛行安全,而且機體易受疲勞損壞,儀器儀表工作失靈,降低全機的可靠性,增加使用維護成本[1-2]。由于直升機振源種類多、激勵頻率范圍寬、低頻振源強度大,使得減振技術成為直升機設計中的一大難題[3-4]。
目前直升機的減振技術可以分為被動式減振和主動式減振[5-6]。2 0世紀6 0年代國外就已經開始對直升機的振動問題進行研究,至今已獲得了顯著成果。在被動式減振方面,貝爾公司發明的聚焦式隔振裝置、節點梁隔振裝置和液彈隔振系統分別成功應用于UH-l、Bell 206和Bell 427[7]。在主動振動控制研究方面,一類是從直升機旋翼的控制人手,如高階諧波控制(HHC)、獨立槳葉控制(IBC)、主動后緣附翼控制(AFC)等;另一類是在機體上采取主動減振措施,如主動式動力吸振器(ADA)、結構響應主動控制( ACSR)等,目前ACSR已成為國外直升機主動減振研究的主流,已有WG30,EH101,UH-60,S-92等機型成功地進行了ACSR的飛行試驗,并應用于UH-60M9 EC225/EC725[8-12n。
國內在直升機振動設計與控制方面也在不斷地進行研究。在被動減振技術研究方面,對直11、直9型機的被動減振隔振裝置進行了研究,同時對槳轂和機體上安裝的動力吸振器、主減隔振裝置進行了設計研究、試制和裝機試驗[13];國內在直升機振動主動控制方面,對ACSR涉及的關鍵技術進行了深入的研究。中國直升機設計研究所以某型國產輕型直升機為驗證機,在國內首次進行了ACSR飛行試驗[14-15];陸洋等開展了電控旋翼的探索性研究[16],該旋翼系統通過電傳操縱方式驅動槳葉內部作動器,改變每片槳葉后緣伺服襟翼的迎角,引起槳葉扭轉變形,從而改變槳葉總距和周期變距,實現直升機飛行操縱。
某型直升機在交付試飛過程中,部分架次直升機的前艙駕駛員腳蹬地板處垂向振動較大,導致飛行員在飛行過程中會出現腿腳麻木的現象。通過全機振動試驗,發現其機身二階固有頻率與旋翼通過頻率相接近。在理想狀態下,機身二階固有頻率會避開旋翼通過頻率,但是由于零件的制造、生產以及部件組裝的差異性,部分架次的直升機的機身二階固有頻率接近旋翼的通過頻率,因此導致機體振動水平過大。這種情況不僅影響了部隊武器裝備的及時到位、訓練計劃的實施,同時因延遲交付造成了有壽件的自然損耗,造成企業和國家財產損失,振動問題已成為制約該型機批產交付和使用的技術瓶頸。
雖然解決直升機振動問題的方法有很多,但對于現役機型,由于結構空間和更改范圍的限制,常規被動減振技術和主動式減振技術都不適用。本文在對直升機機體振動原因進行深入分析后,提出了剛度可調結構的設計思想,用以消除制造偏差對局部結構頻率、振型的影響,從而達到減振的目的。
1 減振方案設計
1.1 減振方案研究
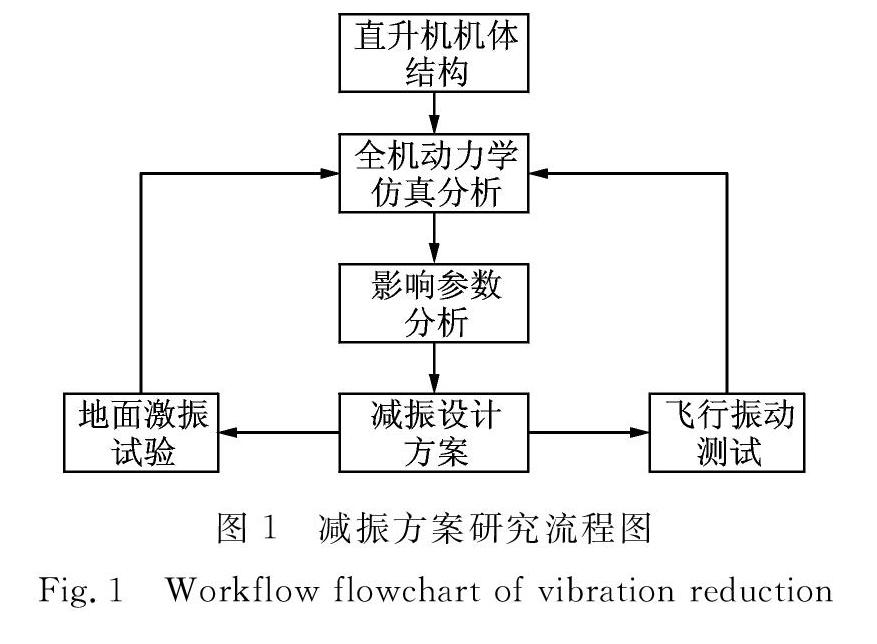
首先建立全機動力學有限元模型,對全機進行動力學特性分析,得到關注頻率范圍內機體模態和頻率;第二步通過地面激振試驗,得到全機動力學特性,試驗結果用于修正全機動力學模型;第三步用修正后的全機動力學模型進行參數敏感性分析,主要分析機體關鍵部位的結構參數對模態的影響,根據參數敏感性分析結果,設計減振方案;第四步在全機動力學模型中增加減振方案,進行動力學特性分析,根據分析結果修正減振方案;最后通過飛行測振檢驗減振效果,然后將試驗的結果再反饋給仿真分析重新計算,從而實現對設計方案的迭代優化。圖1為減振方案研究流程圖。
1.2 動力學分析
首先,根據某現役直升機機體結構,建立全機有限元分析模型,如圖2所示。
通過模態分析,得到機體在20-26 Hz之間的主要模態分析結果。其中,圖3模態為機頭平臺處垂向一彎,頻率為21. 22 Hz。圖4模態為機頭平臺扭轉模態,頻率25. 73z Hz。
均為機體的局部模態。
調整仿真機體結構參數,重點是機頭平臺處的參數,通過機體局部模態的變化,找到影響機體模態的敏感部位,分析結果如表1所示。
根據表1的分析結果,對機體局部模態影響較高的有三個方案:方案1模態頻率增加了10. 03%;方案2模態頻率降低了3.5 8%;方案3模態頻率增加了4. 15%。所以方案1對觀瞄平臺的頻率變化影響最為顯著。
1.3 剛度可調結構設計
通過全機動力學有限元模型進行結構參數敏感度分析,發現機頭平臺與縱梁連接剛度對振動特性影響較大。由于直升機存在個體差異性,出現振動問題的直升機需要的連接剛度是不同的,為了能夠使連接剛度具有可調節性,設計了具有可調節性的彎梁結構,如圖5所示。
該機構主要由彎梁、支座以及螺栓組成。彎梁為整體機加件,分為三個部分:前端、中部、尾部。前端的剖面為工字型,左右兩側各有3個鉚釘孔,通過6個鉚釘與觀瞄平臺連接;中部剖面為工字型,其右側設有4個矩形口,在彎梁與觀瞄平臺連接時能夠起到定位作用;尾部為矩形板,上面設置6個螺栓孔。支座通過上下各3個螺栓固定在縱梁上。利用螺栓將彎梁與支座連接,通過2個或者多個螺栓在不同螺栓孔位置的排列組合方式實現連接剛度的調整。
該結構能夠調整直升機前機身的局部剛度,使前機身的振型發生改變,使得振動節點靠近駕駛員地板,從而實現減振的目的。其剛度調節原理為:彎梁的前端與觀瞄平臺通過6個鉚釘連接,能夠將平臺的振動載荷通過彎梁中部傳遞給尾部,尾部認為是一個懸臂梁結構,通過調整螺栓的約束位置(如圖6螺栓孔標記位置),相當于調整了懸臂梁的長度,進而調整了懸臂梁的剛度,最終實現了機體局部剛度調整。結構剛度調節原理如圖6所示。
1.4 剛度可調結構影響分析
由于剛度可調結構加強了機頭平臺與機體縱梁的連接剛度,對整體強度影響較小,因此,僅建立平臺下縱梁與部分機體縱梁結構有限元分析模型,約束和加載情況如圖7所示。
在相同載荷(1000 N)作用下,無剛度可調結構情況下縱梁最大應力為74 MPa,最大位移為3.72mm,如圖8所示;有剛度可調結構情況下縱梁最大應力為67MPa,最大位移為3.4 mm,如圖9所示。計算表明:剛度可調結構增強了原有剛度,同時彎梁結構也分擔了一部分載荷,降低了原結構的應力水平,強度滿足要求。通過計算分析調整螺栓連接位置,其剛度最大能夠增至初始剛度的1. 145倍,能夠起到很好的剛度調節功能。
安裝剛度可調結構對全機模態和局部模態的影響如表2和3所示。從表2中可以看出,增加剛度可調結構,對機身整體模態影響較小,不會改變機身整體的動力學特性。
從表3中可以看出,剛度可調結構對觀瞄平臺局部模態頻率影響較大,頻率變化最大為6%。
2 試驗驗證
2.1 地面激振試驗
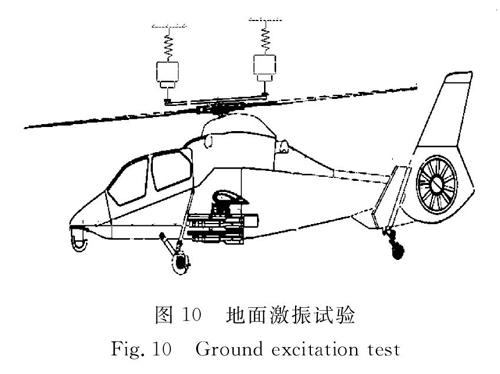
地面激振的方法是將電動式激振器通過彈簧繩系于吊架上,將旋翼轂整流罩和支架拆掉,將一個長約1m的槽形鋁型材的中部通過6個螺栓固定在旋翼轂上,將2個激振器由2個懸臂支架通過定滑輪吊起,安裝在槽型材的兩側,如圖10所示。這種測試方法的優點是雙激振器產生的激振力更大,同時2個激振器通過反向激振可實現對機體的扭轉特性的測量。
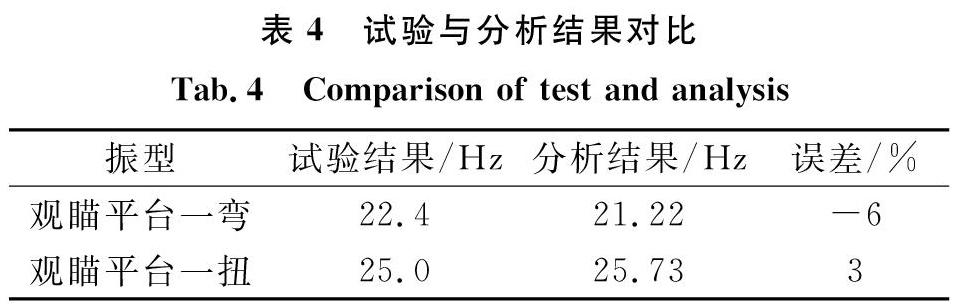
地面激振試驗結果及有限元分析結果對比如表4所示,可以看出計算結果與測試結果比較接近,誤差在6%以內,驗證了動力學模型的準確性。
表5為增加剛度可調結構后,地面激振試驗結果與原機試驗結果對比。從對比結果可以看出,剛度可調結構對觀瞄平臺局部模態頻率影響較大,與仿真分析結果相吻合。
2.2 飛行振動測試
在某型直升機上安裝剛度可調結構進行飛行振動測量試驗,通過多次調整螺栓位置后,減振效果非常明顯。圖11給出了安裝剛度可調結構前后駕駛員前艙地板處的振動對比結果,從對比結果來看,減振作用明顯,振動水平降低幅度達到30%。目前,該方案已解決多架機的振動問題。
針對部分架次直升機,采用調整螺栓安裝孔位的方式達不到精細調整剛度的要求。經過分析,對原彎梁結構方案進行了修改:將原來下面的5個螺栓孔變成一個長方形的槽,將螺栓調整方式由分級式調整改為連續式調整,增加了螺栓調整的精細程度;另外,對該結構局部進行了減弱處理,目的是為了增強螺栓調節的敏感度。改進方案如圖1 2所示。
目前,該方案已在多架機實施,減振效果也比較明顯。表6分別給出了某型直升機左側腳蹬地板振動的對比結果,可以看出減振平均水平達到30%。
3 結 論
本文通過仿真分析、地面激振試驗和飛行振動測試三者結合的方法,開展了某型直升機機體被動式減振技術的研究,設計出一種剛度可調結構減振方法。該方法使該型直升機駕駛艙振動水平平均下降30%以上,減少了振動對直升機結構及成品件的危害,節約了振動調整試飛的費用,提高了該型機的舒適度和可靠性。該減振技術對降低現役直升機的振動水平以及提高未來直升機振動控制能力具有參考價值。
參考文獻:
[1]Glaz B,Friedmann P P,Liu I..Activelpassive vibra-tion reduction and performance enhancement of heli-copter rotors at high advance ratios[C]. Montreal,Canada:American Helicopter Society 64th Annual Fo-rum,2008.
[2]Austruy J. Rotor hub vibration and blade loads reduc-tion,and energy harvesting via embedded radial oscilla-tor[D]. Dallas, USA: Pennsylvania State University,2 011.
[3] 柳文林,穆志韜,段成美.直升機振動與減振特性分析[J].海軍航空工程航空學院學報,2004,19 (5):533-536.
Liu Wenlin,Mu Zhitao,Duan Chengmei. Research onvibration and vibration reduction characteristics of heli-copter[J]. Journal of Naval Aeronautical EngineeringInstitute, 2004, 19 (5): 533-536.
[4] 林長亮,孫秀文,王金亮,等.一種剛度可調的直升機減震機構[P].中國:CN201510001378.8.2016-08-03.
[5] 顧仲權,馬扣根,陳衛東,振動主動控制[M].北京:國防工業出版社,1997.
[6]Gardonios P,Elliott S J.Passive and active isolation ofstructural vibration trans mission between two platesconnected by a set of mounts[J]. Journal of Sound andVibration, 2000, 237(3):483-511.
[7]Konstanzer P,Enenkl B,Auboug P A, et al.Recentadvances in Eurocopter's passive and active vibrationcontrol[C]. USA: The American Helicopter Society64th Annual Forum,2008.
[8]Smith M R, Redinger W S.The model 427 pylon isola-tion system[C]. Montreal, Quebec, Canada:AmericanHelicopter Society 55th Annual Forum, 1999.
[9]Dennis P M. Fluidlastic dampers and isolators for vi-bration control in helicopters[C]. Washington, DC: A-merican Helicopter Society 50th Annual Forum,1994.
[10] Blackwell R,Millott T.Dynamic design characteristicsof the Sikorsky X2 technology TM demonstrator air-craft[ C]. Montreal, Canada: Proceedings of the 64thForum of the American Helicopter Society, 2008.
[11] Wang J K, Welsh W A, Lamb R.Risk reduction flighttest of a pre-production active vibration control systemfor the MH-60S[C]. San Francisco,California,USA:Proceedings of the AHS Vertical Lift Aircraft DesignConference,2006.
[12] Vignal B, Krysinski T.Development and qualificationof active vibration control system for the EurocopterEC225/725[C]. American Helicopter Society 62ndAnnual Forum,2005.
[13]袁勝濤,旋翼/機身耦合系統的固有特性及旋翼隔振研究[D].南京:南京航空航天大學,2000.
[14]胡 俊,顧仲權,直升機振動主動控制中作動器的最佳布置研究[J].南京航空航天大學學報,2000,32 (1):69-74.
Hu Jun, Gu Zhongquan. Research on optimal locationof actuators in active vibration control for helicopter[J]. Journal of Nanjing University of Aeronautics andAstronautics,2000,32 (1):69-74.
[15]楊鐵軍,顧仲權,基于誤差通道在線辨識的直升機結構振動主動控制研究[J].航空學報,2004,25 (1):36-40.
Yang Tiejun,Gu Zhongquan. Investigation of the activecontrol of helicopter structural vibration with onlinesecondary path modeling[J]. Acta Aeronautica et As-tronautica Sinica,2004 ,25 (1): 36-40.
[16]陸 洋,王浩文,高 正,電控旋翼氣彈動力學建模研究[J].航空動力學報,2006,21(6):1011-1026.
Lu Yang,Wang Haowen,Gao Zheng. Aeroelastic dy-namic modeling of the electrically controlled rotor[J].Journal of Aerospace Power, 2006, 21 (6):1011-1026.