船舶橫搖混沌閾值的數(shù)值方法研究
2019-03-14 03:52:16劉亞沖
船舶力學(xué) 2019年2期
劉亞沖
(中國船舶及海洋工程設(shè)計研究院 基礎(chǔ)研究部,上海200011)
0 引 言
迄今,梅爾尼科夫方法是研究確定性動力系統(tǒng)全局穩(wěn)定性的唯一解析方法。它通過構(gòu)造系統(tǒng)的梅爾尼科夫函數(shù),求解該函數(shù)的一階簡單零點得到系統(tǒng)Poincare映射具有Smale馬蹄變換意義下混沌閾值,作為檢測混沌閾值的解析方法已被成功應(yīng)用于許多系統(tǒng)中[1-3]。一般情況下,解析求解梅爾尼科夫函數(shù)時,需要先求出系統(tǒng)的同宿或異宿軌道的參數(shù)表達式,然后將其代入到梅爾尼科夫函數(shù)中,再利用積分表或留數(shù)定理計算。但直接對軌道方程進行解析求解較為困難。針對這一問題,本文選取兩種數(shù)值方法對達芬振子系統(tǒng)求解梅爾尼科夫函數(shù),并對兩種數(shù)值方法進行對比分析。一種是用函數(shù)逼近的方法得到軌道方程的近似表達式,而該近似表達式易于進行積分計算;另一種是通過對相函數(shù)分析,將梅爾尼科夫函數(shù)的積分轉(zhuǎn)化到易于進行的積分域上進行。
梅爾尼科夫函數(shù)有簡單零點只是系統(tǒng)出現(xiàn)混沌運動的必要條件,因此在計算出混沌閾值后還應(yīng)該進行數(shù)值驗證。龐加萊映射、安全池和李雅普諾夫指數(shù)是三種常用的混沌識別方法,本文選取李雅普諾夫指數(shù)譜對諧和激勵作用下的達芬系統(tǒng)進行數(shù)值驗證。
運動的有界性問題通常采用“安全盆”的概念來描述,它被定義為所有有界解吸引域的集合,其中安全盆侵蝕現(xiàn)象通常用來解釋動力系統(tǒng)的全局失穩(wěn)行為。這一概念最早由Thompson[4]等在研究船舶的傾覆問題時提出,并被應(yīng)用到不同的工程領(lǐng)域中。對于船舶運動系統(tǒng)而言,安全池是滿足船舶橫搖角和橫搖角速度的穩(wěn)態(tài)解落在一有界域的所有初值的集合,穩(wěn)態(tài)解一旦超出這個有界域,船舶就無法提供足夠大的復(fù)原力矩來抵抗傾覆力矩,從而發(fā)生傾覆。在本文最后,采用梅爾尼科夫方法對某型船的橫搖混沌閾值進行了計算,并觀察了安全盆從完整到侵蝕的過程。
1 非線性動力系統(tǒng)的梅爾尼科夫函數(shù)
杜芬振子作為一類非線性動力系統(tǒng),具有廣泛的應(yīng)用背景。典型的杜芬振子的表達式為:

其中:α為阻尼系數(shù),β和γ為恢復(fù)力系數(shù),ζ為激振力幅值。
令 β=-1,γ=1,α=εα1,ζ=εζ1;α,ζ=o(ε)。 將上式寫成狀態(tài)向量正則方程的形式為:

當(dāng) α1=ζ1=0 時,(2)式退化到無擾系統(tǒng)(3),其 Hamilton 量和勢函數(shù)分別為(4)式和(5)式。
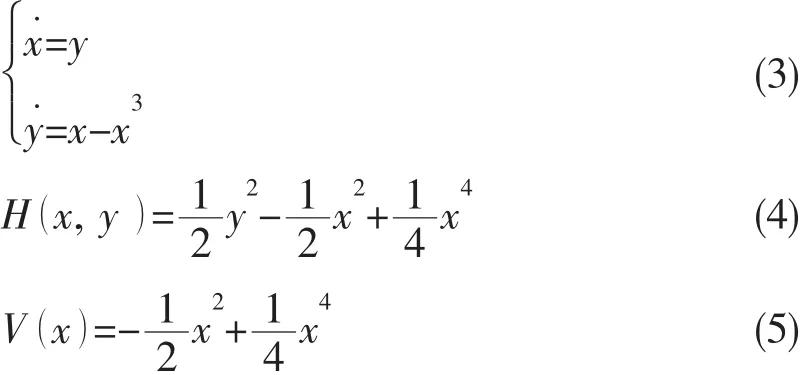
無擾系統(tǒng)(3)的平衡點為 s(0,0)、cl(-1,0)和cr(1,0),其中s為鞍點,cl和cr為左右中心。當(dāng)H(0,0)時,存在兩條連接鞍點的同宿軌道。過鞍點的同宿軌道滿足方程

同宿軌道有左右對稱的兩支,t∈(-∞,+∞)時,軌線從鞍點出發(fā)繞中心點順時針旋轉(zhuǎn)一周,最終再回到鞍點,同宿軌道和勢函數(shù)見圖1。由圖不難看出,x(t)為偶函數(shù),y(t)為奇函數(shù)。
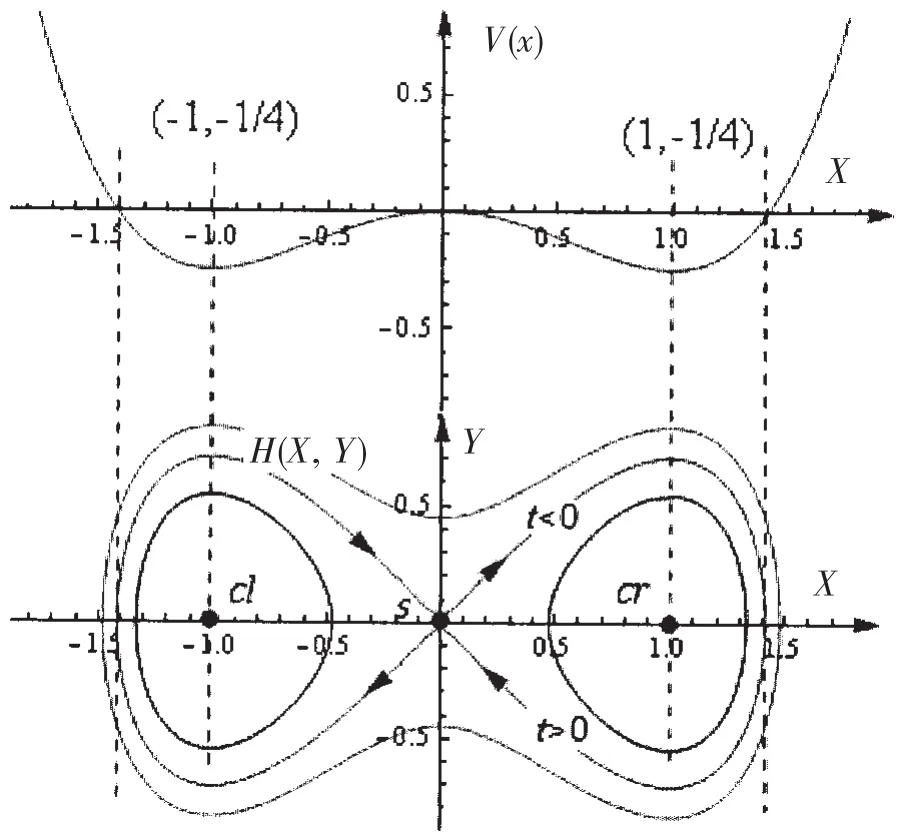
圖1 無擾系統(tǒng)的同宿軌道和勢函數(shù)圖Fig.1 Homoclinic orbit and potential function of undisturbed system
當(dāng) α≠0,ζ≠0,且足夠小時,(2)式仍為可積系統(tǒng)。按照Smale-Birkhoff同宿理論[5],同宿軌道的穩(wěn)定流形與不穩(wěn)定流形橫截相交可能使非線性動力系統(tǒng)出現(xiàn)混沌。
設(shè)無擾系統(tǒng)同宿軌道的參數(shù)方程為xi(t)和 yi(t),受擾系統(tǒng)(2)同宿軌道的梅爾尼科夫函數(shù)可寫為:

其中:

根據(jù)梅爾尼科夫理論,若M( t0)具有不依賴ε的簡單零點,即存在M( t0)=0且,則對于充分小的ε,Poincare映射具有Smale馬蹄變換意義下的混沌。因此,出現(xiàn)同宿軌線橫截相交的必要條件是

2 梅爾尼科夫函數(shù)零點的數(shù)值算法
2.1 類帕德逼近方法
對于較復(fù)雜動力系統(tǒng),理論計算同宿(或異宿)軌道的參數(shù)方程較為困難,可以采用函數(shù)逼近的思想去近似模擬。帕德逼近方法[6]是一種基于高階泰勒展開構(gòu)造設(shè)解函數(shù)的特殊方法,它以有理函數(shù)作為逼近工具,可以很好地克服泰勒展開在實際應(yīng)用中的不足之處。
由圖1可知,x(t)為偶函數(shù)且有以下初值條件:

設(shè) x (t)在不同時間t處的級數(shù)展開式為

將(11)式代入(3)式可得

將(11)式和(12)式寫為類帕德逼近多項式(QPA)的形式為

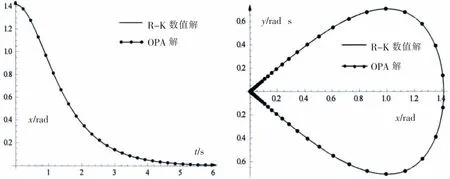
圖2 同宿軌道的類帕德逼近解(右支)Fig.2 The Quasi-Pade approximation of homoclinic(right branch)
將上式與(11)式和(12)式的泰勒級數(shù)展開進行對應(yīng)比較后可得 α0=0,α1=21.5,β1=1,因此同宿軌道參數(shù)方程的類帕德逼近函數(shù)為:

圖2是類帕德逼近解(QPA)與Runge-Kutta數(shù)值解(R-K)的對比,可以看出類帕德逼近得到的參數(shù)方程與精確解基本一致。
將(15)式代入(7)式即可求出梅爾尼科夫函數(shù)的簡單零點。
2.2 高斯—勒讓德方法
如果只需計算梅爾尼科夫函數(shù)的簡單零點,不關(guān)注軌道參數(shù)方程解的具體形式,可以繞過參數(shù)方程的求解,通過對Hamilton量做一些變換,將積分轉(zhuǎn)化到易于計算的積分域上[7]。由(4)式可得

在同宿軌道上,對上式分離變量得

其中:x0是同宿軌道與x軸的交點。
將(17)式代入A和B的表達式可得

其中:xi為鞍點。為了計算積分A和B,將積分域 [x0,xi]均勻劃分N個子區(qū)間。設(shè)其中某個子區(qū)間為[a,b],則在[a,b]中選取三個高斯點可按下式進行:
三個高斯點對應(yīng)的權(quán)重系數(shù)分別為 w1=0.555 6,w2=0.888 9,w3=0.555 6。取 α=0.5,β=-1,γ=1,外激勵頻率變換區(qū)間為0~1.5 rad/s。在計算B時,內(nèi)外積分域應(yīng)分別劃分子區(qū)間,本文中內(nèi)部積分域劃分50個子區(qū)間,外部積分域劃分100個子區(qū)間。最終得到的計算值見圖3。采用Gauss-Legendre積分的優(yōu)點在于,無需重新構(gòu)造差值函數(shù)再進行數(shù)值積分,直接利用Gauss-Legendre公式的離散形式即可。此外,高斯積分點本身就是不等分積分點,因此具有較高的計算效率和精度。
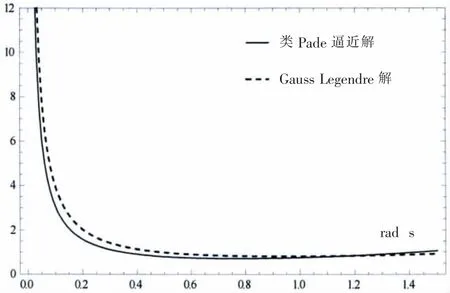
圖3 混沌閾值曲線(類Pade逼近解與Gauss-Legendre解)Fig.3 Chaos threshold curve(QPA versus Gauss-Legendre)
由于類Pade逼近得到的軌道參數(shù)方程與精確解幾乎無差異,圖3中類Pade逼近解可作為精確解。Gauss-Legendre解比類Pade逼近解稍大。由于Gauss-Legendre方法在計算梅爾尼科夫函數(shù)零點時易于實施,在不需要軌道方程的參數(shù)解時可以采用Gauss-Legendre方法。
2.3 數(shù)值驗證
由梅爾尼科夫函數(shù)計算出一階零點只能說明系統(tǒng)存在不變集Λ,這只是系統(tǒng)出現(xiàn)混沌的必要條件[8]。下面將通過數(shù)值計算方法即Lyapunov指數(shù)譜對結(jié)果進行進一步分析。
Lyapunov指數(shù)表示系統(tǒng)在經(jīng)過充分長時間的演變后,單位時間內(nèi)所引起的指數(shù)分離[5]。對于本文中連續(xù)的微分動力系統(tǒng),選取RHR算法[9],并對ω=1 rad/s這一激勵頻率進行驗證。由上文計算可得,ζ>0.811 1α即ζ>0.406時系統(tǒng)可能出現(xiàn)混沌。分別計算ζ1=0.35和ζ2=0.45時系統(tǒng)的Lyapunov指數(shù),數(shù)值計算結(jié)果見圖4。
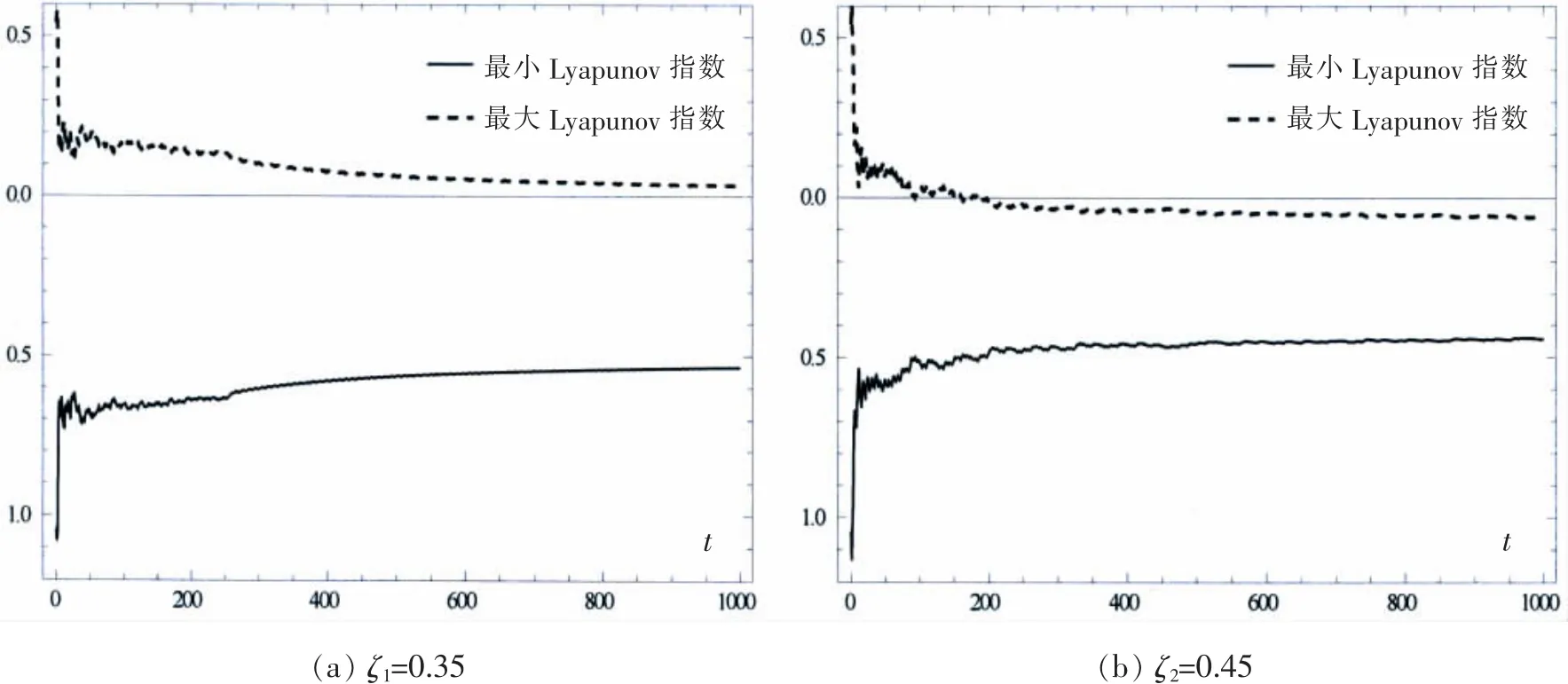
圖4 不同激勵幅值下Lyapunov指數(shù)譜Fig.4 Lyapunov exponents of different excitation range
從圖4中可以看出,當(dāng)激勵幅值小于混沌閾值時,系統(tǒng)的最大Lyapunov指數(shù)小于零,軌道會收縮并最終趨于穩(wěn)定值。當(dāng)激勵幅值大于混沌閾值時,系統(tǒng)的最大Lyapunov指數(shù)大于零,表示軌道分離,運動已不再穩(wěn)定。
3 船舶非線性橫搖動力系統(tǒng)
作為一單自由度的動力系統(tǒng),船舶橫搖的非線性體現(xiàn)在阻尼力矩的非線性和恢復(fù)力矩的非線性。該橫搖方程的表達式見下式:
其中:Jφφ和ΔJφφ為轉(zhuǎn)動慣量和附加轉(zhuǎn)動慣量,為阻尼項,
因船舶橫搖運動的左右對稱性,非線性恢復(fù)力矩中只有奇次方項。可通過對消滅曲線擬合得到。(21)式兩邊同除以 (Jφφ+ΔJφφ)可得

在(21)式引入小參數(shù) 0<ε<<1,則有

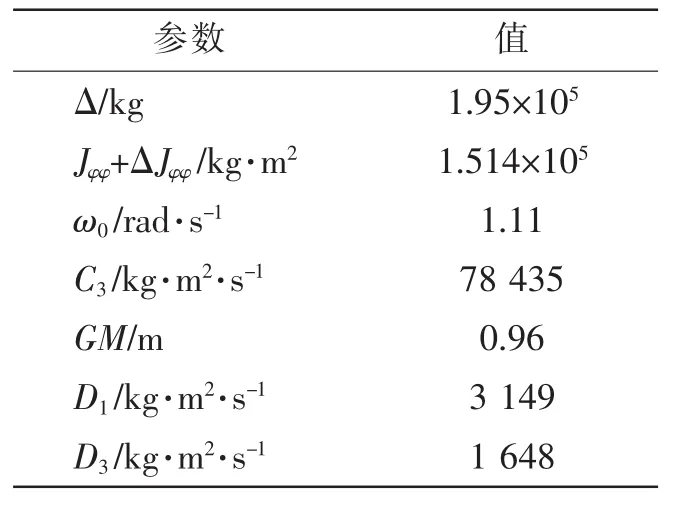
表1 某型船主要參數(shù)列表Tab.1 List of parameters of ship
選取某型船[10],船型參數(shù)見表1。
該橫搖系統(tǒng)的正則方程形式為:

系統(tǒng)的相圖和勢函數(shù)見圖5。圖中sl是左鞍點,sr是右鞍點,c是中心點。sl和sr即對應(yīng)橫搖的穩(wěn)性消失角,其中sl=-sr=-1.543 rad。
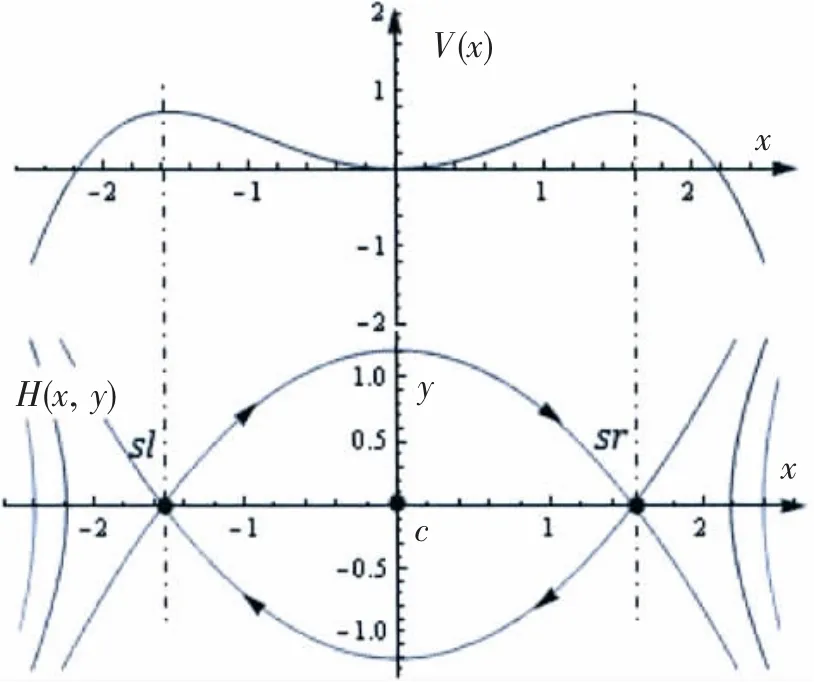
圖5 船舶橫搖系統(tǒng)的相圖和勢函數(shù)Fig.5 Phase plan and potential function of ship-roll system
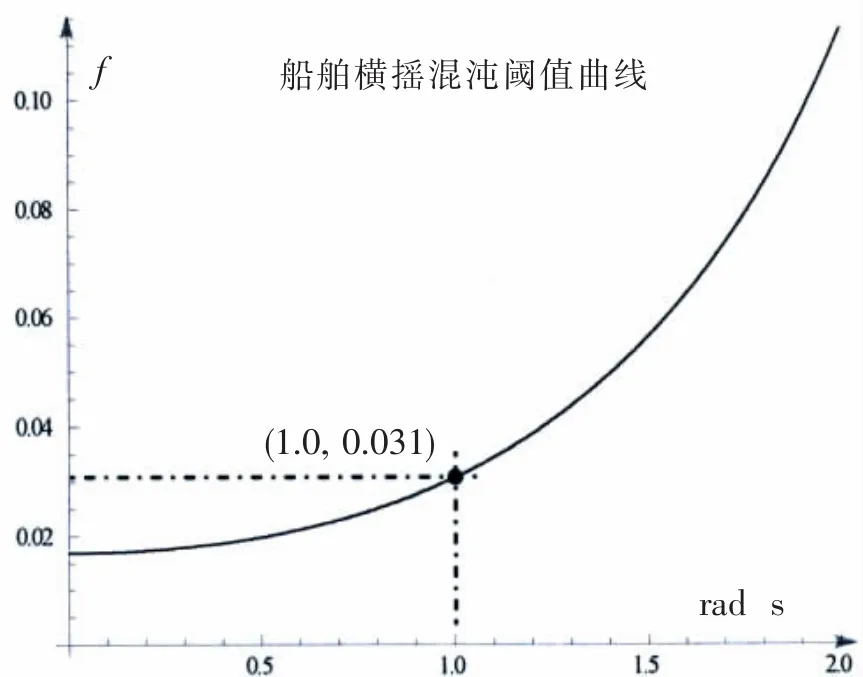
圖6 船舶橫搖系統(tǒng)的混沌閾值曲線Fig.6 Chaos threshold curve of ship roll system
該橫搖系統(tǒng)的梅爾尼科夫函數(shù)為:

將表1中參數(shù)代入上式,波浪頻率范圍取Ω∈ [0~2.0 rad/s],將積分域從時間域轉(zhuǎn)到空間域并設(shè)置適當(dāng)?shù)淖訁^(qū)間和高斯積分點可得到該系統(tǒng)的混沌閾值曲線,見圖6。
選取波浪激勵頻率Ω=1.0 rad/s下的混沌閾值進行數(shù)值驗證,此時激勵幅值的閾值為0.031。選取不同的激勵幅值計算得到船舶橫搖的安全池見圖7-9。
從圖中可以看到,當(dāng)激勵幅值小于閾值時,橫搖系統(tǒng)的安全池完整,隨著激勵幅值的增大,安全池逐步發(fā)生破損。在破損域中選取a、b兩點作為初值計算得到的相軌跡見圖10。從a、b兩點出發(fā)的相軌跡繞中心點逐漸振蕩發(fā)散,當(dāng)橫搖角達到左鞍點即穩(wěn)性消失角時,橫搖角和橫搖角速度將持續(xù)增大,此時傾覆發(fā)生。
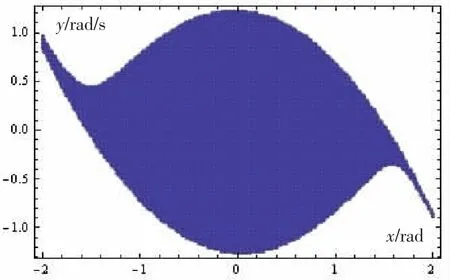
圖7 橫搖安全池(f=0.025)Fig.7 Safe basin(f=0.025)
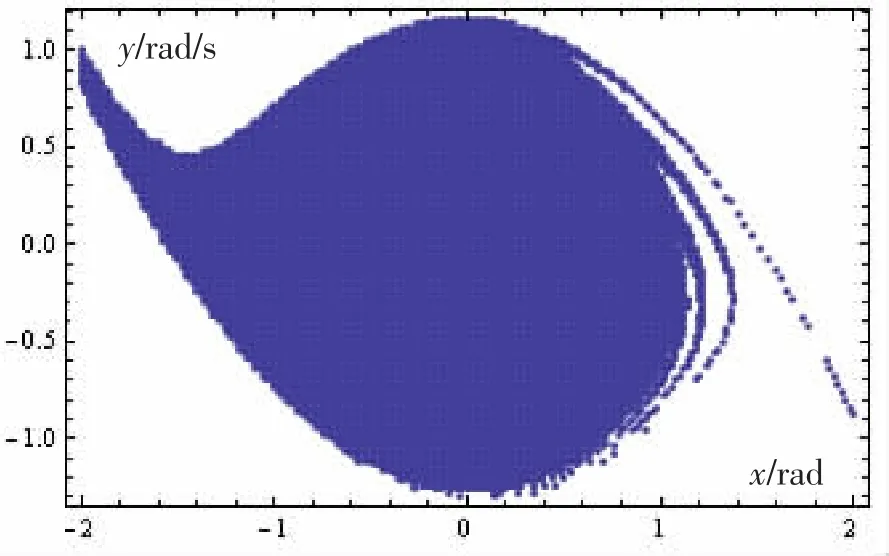
圖8 橫搖安全池(f=0.04)Fig.8 Safe basin(f=0.04)
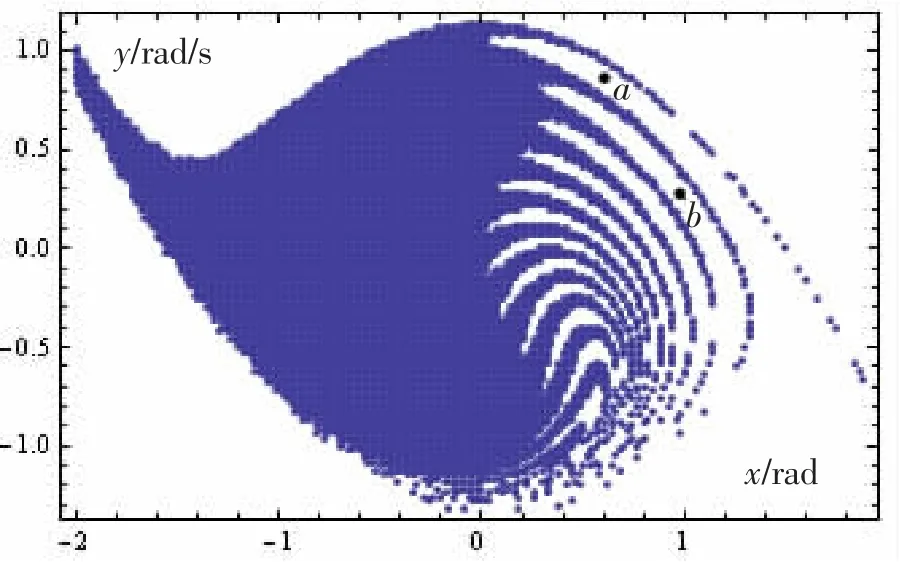
圖9 橫搖安全池(f=0.08)Fig.9 Safe basin(f=0.08)
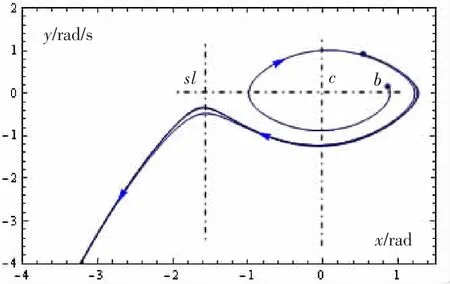
圖10 破損點的相軌跡Fig.10 The phase trajectory of breakage points
4 結(jié) 語
梅爾尼科夫方法是預(yù)測非線性動力系統(tǒng)出現(xiàn)混沌閾值強有力的解析方法。針對在求解梅爾尼科夫函數(shù)積分時遇到的困難,本文采用了類Pade逼近和Gauss-Legendre積分兩種處理方法,并對比分析了兩種方法的計算結(jié)果及各自的優(yōu)缺點。在不需要軌道參數(shù)方程的具體形式時,可以采用易于工程計算的Gauss-Legendre積分。作為驗證,采用時域仿真計算了系統(tǒng)的Lyapunov指數(shù)譜。最后采用梅爾尼科夫方法對某船舶的橫搖動力系統(tǒng)進行分析,得到了橫搖混沌閾值曲線,觀察了安全池隨激勵幅值增大而逐漸破損的過程,并選取破損域中的點計算了相軌跡。本文工作對于研究船舶傾覆機理,進行穩(wěn)性評估有一定意義。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56