菜鳥看模型
2019-03-18 07:08:10
航空模型 2019年4期
關鍵詞:模型

一、俯仰力矩平衡
影響模型穩定滑翔的關鍵是俯仰力矩平衡,其與模型繞機身橫軸轉動的俯仰運動有關。模型上的各種力,只要不通過重心,就會產生使模型繞橫軸轉動的力矩:使模型上仰的為抬頭力矩;使模型低頭的為低頭力矩。注意,力矩的大小由作用力和該力到重心的距離的乘積決定。因此,在分析力矩時,既要注意力的方向,還要注意力的大小(計算時,相同方向的力矩可以相加,相反方向的力矩可以相減)。
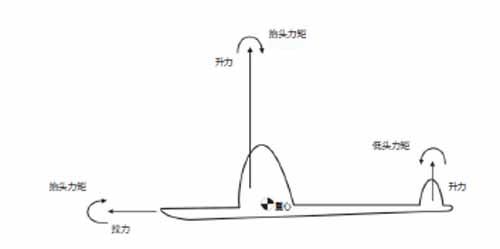
模型力矩分析示意圖
模型上,所有促使其抬頭的力矩相加可得到總抬頭力矩;所有促使其低頭的力矩相加可得到總低頭力矩。這一對力矩決定著模型的俯仰運動狀態:如果總抬頭力矩大于總低頭力矩,模型就會繞機身橫軸抬頭;如果總低頭力矩大于總抬頭力矩,模型就會繞橫軸低頭;只有總抬頭力矩等于總低頭力矩時,模型才不會出現俯仰運動而保持平衡狀態。這就是俯仰力矩平衡。
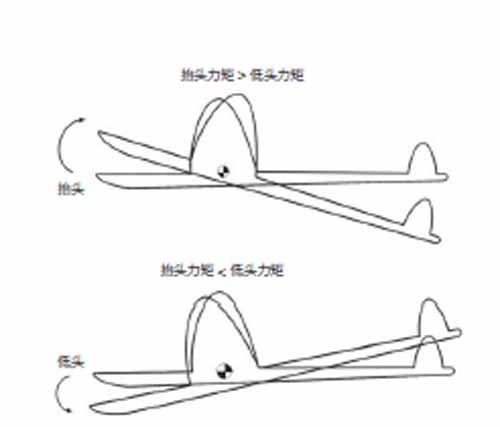
俯仰力矩決定模型的運動狀態
產生俯仰力矩的力通常有3種:一是動力裝置的拉力,其產生的力矩方向由拉力相對重心的高低位置而定,拉力線如果在重心之上,則會產生低頭力矩;如果在重心之下,就會產生抬頭力矩。二是飛行時作用在機身各部位的阻力。阻力的力矩一般較小,且不會隨迎角而變化或變化甚微,調整模型時一般不用考慮。三是作用在機翼、水平尾翼上的升力。機翼和水平尾翼產生的升力力矩對俯仰力矩平衡的影響最大,是調整模型俯仰力矩平衡的關鍵因素。
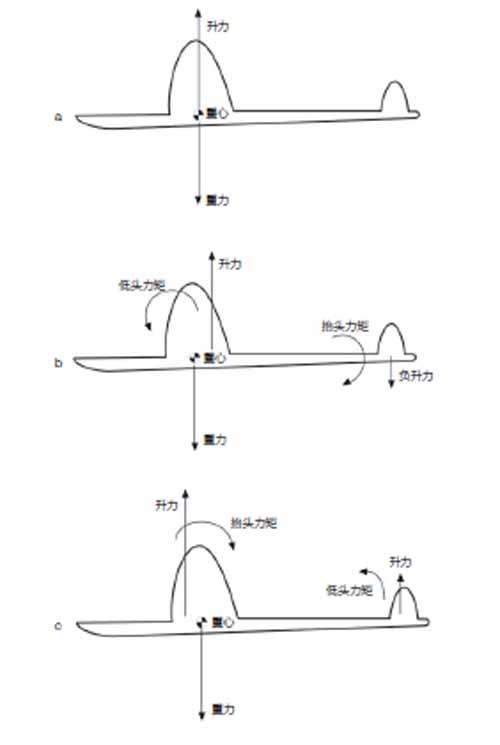
升力力矩平衡的3種方式
二、升力力矩平衡
升力力矩平衡通常有3種形式:第一種是機翼升力通過重心、水平尾翼不產生升力。由于它們對重心都不產生力矩,因此總力矩為零,可使模型達到力矩平衡。第二種是機翼的壓力中心(升力作用點)在重心之后,機冀升力產生低頭力矩,水平尾翼產生負升力形成抬頭力矩,兩個力矩達到平衡。第三種是機翼壓力中心在重心前,機翼升力產生抬頭力矩,水平尾冀產生的負升力形成低頭力矩,兩個力矩達到平衡。
調試模型時,可根據其重心位置大體上估計出是哪一種力矩平衡方式:重心在機翼30%一35%翼弦長之間的,通常是第一種平衡方式,此時尾翼阻力最小。重心在機翼30%翼弦長之前的,一般是第二種平衡方式,此時模型的穩定性較好,但尾翼會產生負升力,空氣動力略有損失。重心在機翼35%翼弦長之后的,一般是第三種平衡方式,此時模型穩定性較差,但能利用水平尾翼產生升力,提高其空氣動力性能,常見于競時項目中。
升力力矩平衡和空氣密度無關,調整好的模型不會因空氣密度的改變(如高度變化等)而破壞平衡狀態。同時,它與模型的飛行速度也無關。升力力矩平衡只取決于機翼和尾翼的面積、升力系數和力臂。如果模型的升力力矩不平衡,可以用改變上述因素的方法使之達到平衡。需要注意的是,實際調整時一般不采用改變機翼或尾翼面積的方法,因為對于已做好的模型來說,這種方法十分麻煩。
常用的調整方法是改變力臂大小,即通過配重的方式移動整機的重心位置。對于重心靠后的機型,前移重心相當于減小了機翼的力臂、增大了水平尾翼的力臂,即減小抬頭力矩、增大低頭力矩。反之,若后移重心則會增大抬頭力矩、減小低頭力矩。
對于重心靠前的模型來說,前移重心后,機翼和水平尾翼的力臂都會增大,但前者增加的比例大于后者,故機翼低頭力矩的增大多于水平尾翼抬頭力矩的提高。而后移重心時,機翼低頭力矩的減小大于水平尾翼抬頭力矩的減小。總之,無論重心在什么位置,重心前移相當于抬頭力矩減小;重心后移相當于抬頭力矩增大。
改變升力系數也是調整升力力矩平衡的常用方法。具體來說是改變機翼或水平尾翼的安裝角:在一定范圍內,增大安裝角會增大升力系數;減小安裝角會減小升力系數。
通過加裝配重的方式改變模型重心位置,可調整模型的俯仰平衡。
三、迎角
迎角是翼弦與相對氣流的夾角。模型飛行時,哪個升力系數能保證抬頭力矩和低頭力矢臥目等,這個升力系數對應的迎角就是模型飛行中能保證其力矩平衡的迎角。如果模型不以該迎角飛行,抬頭力矩和低頭力矩就不相等,就會在力矩作用下產生繞橫軸的轉動,最終達到合適的迎角而保持平衡。
在一定范圍內,機翼和水平尾翼的安裝角差與其所對應的迎角大體上是正比例關系。具體表現為,機翼與水平尾翼的安裝角差越大,保證力矩平衡的機翼迎角就越大;反之,該迎角就越小。操縱模型時的拉桿以及調整時墊高水平尾冀后緣,都會增大安裝角差,使該迎角增大;而操縱時的推桿或調整時墊高水平尾翼前緣,則會減小安裝角差,使該迎角減小。
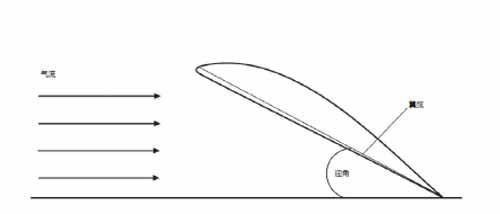
迎角示意圖
無論模型是正常滑翔還是不正常的俯沖、波狀飛行、或者迫降,其飛行狀態的變化均與迎角有關,變化的全過程通常為:小迎角飛行時,模型表現為俯沖,此時迎角越小、俯沖角越大、速度越大。隨著迎角的增加,俯沖角和速度都逐漸減小,到一定程度后,模型達到正常滑翔。迎角繼續增大超過臨界迎角后,模型表現為波狀飛行——先是連續的波狀飛行(機翼失速、尾冀未失速),接著是間斷的波狀飛行(機翼、尾翼均失速)。迎角增大到90°時,模型進入迫降姿態。
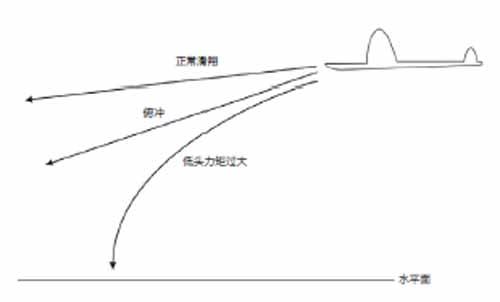
模型俯沖原因示意圖
四、俯沖、波狀飛行與迫降
模型滑翔試飛時,經常會出現俯沖和波狀飛行兩種不正常的飛行姿態。想要糾正模型這種錯誤的飛行姿態,掌握正確的調整方法,首先要了解其形成原因。
造成模型俯沖的原因主要是飛行迎角太小。由于迎角減小,模型的升阻比減小,其下滑角會增大。同時,由于迎角過小,模型的升力系數減小,因此下滑速度很大。解決模型俯沖最常角的方法有3個:一是減小水平尾翼的安裝角;二是調整模型重心,使其后移;三是加大機翼的安裝角。
造成模型波狀飛行的原因是臨界迎角以內的所有迎角都不能滿足平衡要求。例如,假設一架模型的最大升力系數是1.2,而平衡所需的升力系數是1.4。此時,若用小迎角飛行,模型會產生抬頭力矩,導致其不斷抬頭,迎角隨之增大。由于能保證模型力矩平衡的迎角并不存在,因此模型的迎角會繼續增大直至超過臨界迎角。此時升力系數驟減、阻力系數猛增,模型會因失速下沖。下沖獲得速度后,模型又會抬頭。如此周而復始,便形成波狀飛行。
可通過減小模型保持力矩平衡所需的迎角來解決波狀飛行問題,具體方法有3種:一是加大水平尾翼安裝角;二是使重心前移;三是減小機翼安裝角。在調整模型時,若機翼、水平尾翼安裝角差擴大到30°以上、機翼的迎角達到90°附近時,模型的升力為零,只能垂直下降,這種飛行狀態被稱為迫降。迫降的正確姿態是:機身基本上保持水平,模型的運動方向為平穩垂直下降,且速度緩慢。
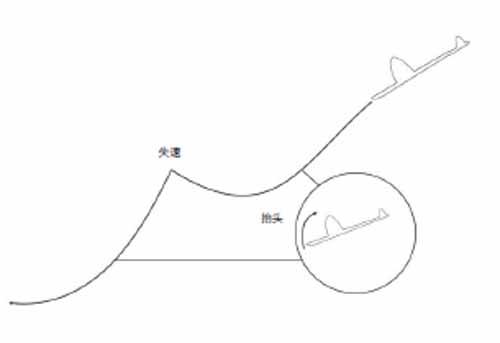
模型波狀飛姿態示意圖
迫降時,模型可能出現波狀飛行、低頭前滑和抬頭下降3種不正常的姿態。若模型發生波狀飛行,一般是因為水平尾翼翹起太小;若模型低頭前滑,一般是因為水平尾翼翹起稍小;若模型抬頭下降,一般是因水平尾翼翹起太大。切記,迫降時模型出現波狀飛行是很危險的,一旦出現要立即調整。而后兩種現象雖不危險,但下降速度較大,也應調整。此外,模型迫降時還容易發生螺旋,通常是由橫側力矩或方向力矩引起的,主要是因為機翼扭曲或水平尾翼向一邊翹起偏斜。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19