汽車轉彎限速與道路形態關系仿真研究
2019-03-19 04:40:22徐磅迤張晉西羅雙寶
重慶理工大學學報(自然科學) 2019年2期
徐磅迤,張晉西,羅雙寶
(重慶理工大學 機械工程學院, 重慶 400054)
汽車已成為人們日常出行使用最為廣泛的交通工具,而對道路交通情況辨認不準確是交通事故安全的最大隱患。全世界每年因道路交通事故而死亡的人數達70萬,受傷人數超過500萬,道路交通事故累計死亡人數已超過 3 000萬[1]。在彎道路段行駛時,駕駛人無法及時觀察各種動態,不能獲取足夠的道路信息,難以對路面情況作出準確判斷。這時就需要交通限速為車輛傳遞警示信息,駕駛員在有速度限制的路段行駛時通常以該速度為依據控制行車速度[2]。
《公共工程技術標準》中給出:道路限速應根據設計速度、運行速度、路測干擾和周圍環境等因素來確定[3]。然而當前國內對道路的限制車速制定時缺乏理論支持,常以設計車速作為基本值進行限速,對特殊路段多以20 km/h進行折減[4]。目前國內外公路限速主要有全線限速、特殊點局部限速、分路段限速和可變限速等幾種方法[5]。我國高速公路限速值是由各路段管轄部門確定的,主要是在法定限速值和設計速度的基礎上,根據車流量、交通事故、沿路地區發展水平進行調整[6]。到目前為止,限速問題尚未有統一的認識和規范化的設計原則,國家標準中也未有此明確規定[7]。隨著人們對安全及運行效率要求的提高,對合理限速值的確定提出了質疑和要求。通過采用更為先進的計算機軟件SolidWorks,構建設計試驗仿真,可大大簡化試驗流程和減少試驗成本。隨著軟件技術的發展和基礎試驗數據的積累,未來有望實現更精確的模擬仿真。
本文使用SolidWorks軟件對汽車零件進行三維造型和裝配,完成后進入Motion添加約束、驅動力、工作阻力等,建立仿真模型[8],對汽車在不同路面形態的行駛過程進行模擬仿真和動力學分析,為制定限速標準提供了一種更為準確、快捷的方法。該研究可避免車輛在轉彎過程中因驅動輪過度滑轉而降低車輛的附著力,從而有效地提高車輛在彎道行駛的安全性。
1 車輛的三維模型
通過建立汽車轉向機構及汽車行駛模型,模擬汽車轉向機構的工作過程及汽車在給定驅動、轉向關系、道路形態的行駛過程。通過給汽車方向盤加上分段的轉向函數,經過梯形機構轉化為前輪的轉動,用于汽車轉向模擬。通過本仿真模型,建立不同形態的路面模型,觀察汽車在不同路面模型上的行駛狀態[9]。
汽車機械轉向系由轉向操縱機構、轉向器和轉向傳動機構3部分組成,本文采用的是非獨立懸架配用的轉向傳動機構。汽車轉向機構是保證汽車轉向行駛時滿足特定轉向規律的重要機構,對于汽車安全性、操縱穩定性、行駛穩定性及輪胎壽命都有影響[10-14]。轉向傳動機構是將轉向器輸出的力和運動傳遞給轉向橋兩側的轉向節,使兩側轉向輪按一定的關系偏轉,保證汽車轉向時車輪與地面的相對滑動盡可能小。
為了模擬方便,汽車轉向機構簡化為如圖1所示的機構,由方向盤、梯形機構、轉向直拉桿、轉向節臂、等腰梯形機構和車輪組成。圖2所示為汽車行駛模擬模型,由車身、前輪轉向機構、后輪驅動機構組成。通過給車輪和路面建立三維碰撞關系,設置車輪與地面的摩擦,后輪的轉動、摩擦力使得汽車行駛。
主要設計參數:兩前輪主銷中心距B=1 400 mm,汽車軸距L=2 000 mm,轉向橫拉桿長度為1 300 mm,轉向梯形底角γ=70°,轉向直拉桿長度為600 mm,轉向節臂長度為350 mm,車輪外徑D=700 mm。
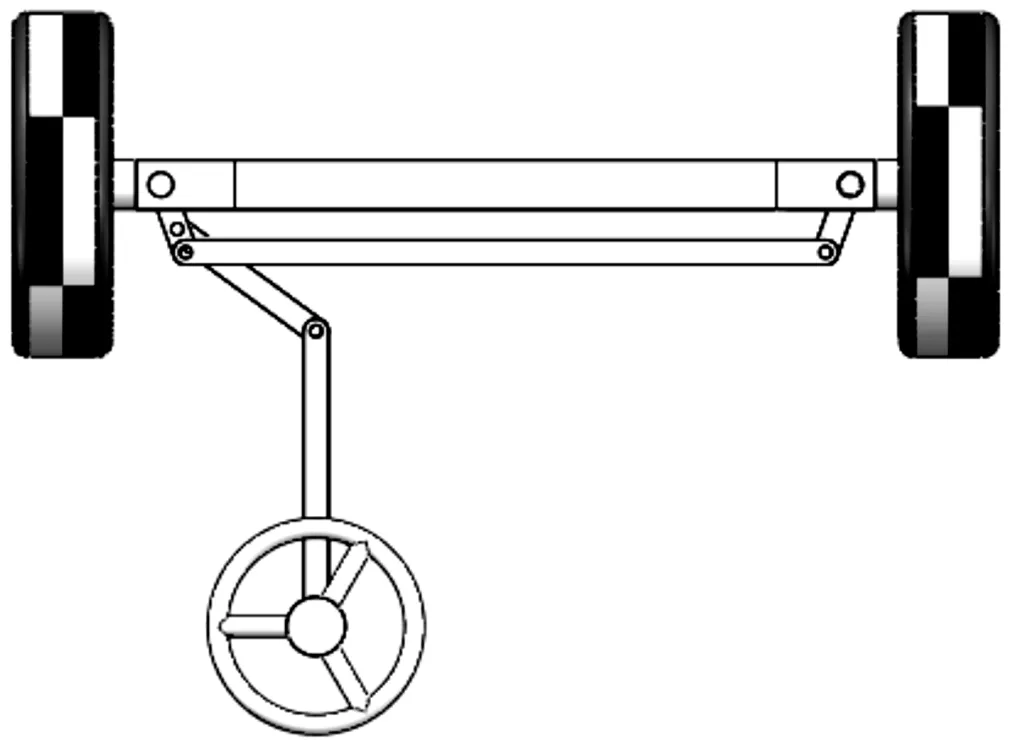
圖1 汽車轉向機構簡圖

圖2 帶轉向機構的汽車模型
1.1 車輛在斜面彎道行駛狀況分析
車輛在進入斜面彎道行駛時,通常處于減速行駛狀態。由于車輛受到離心力的作用,當速度過快時,車輛極易出現側滑甚至側翻等危險情況,考慮汽車制動時的方向穩定性,往往在汽車進入彎道前,駕駛員就需要提前進行制動減速。在轉彎行駛時,車輛速度較低,因此滾動阻力和空氣阻力可以忽略不計。
1.2 三維模型建模
以路面傾角ψ、彎道半徑R進行三維建模。汽車庫設計最大坡度約為15%(8°),因此擬定彎道傾角ψ分別為6.5°、8°、9.5°。彎道外圈半徑R按城市主干道設為38 m,平原公路最小半徑為108 m,山區公路最小半徑為256 m,建模時彎道角度均為22.5°。路面三維模型如圖3所示,其具體參數取值如表1、2所示
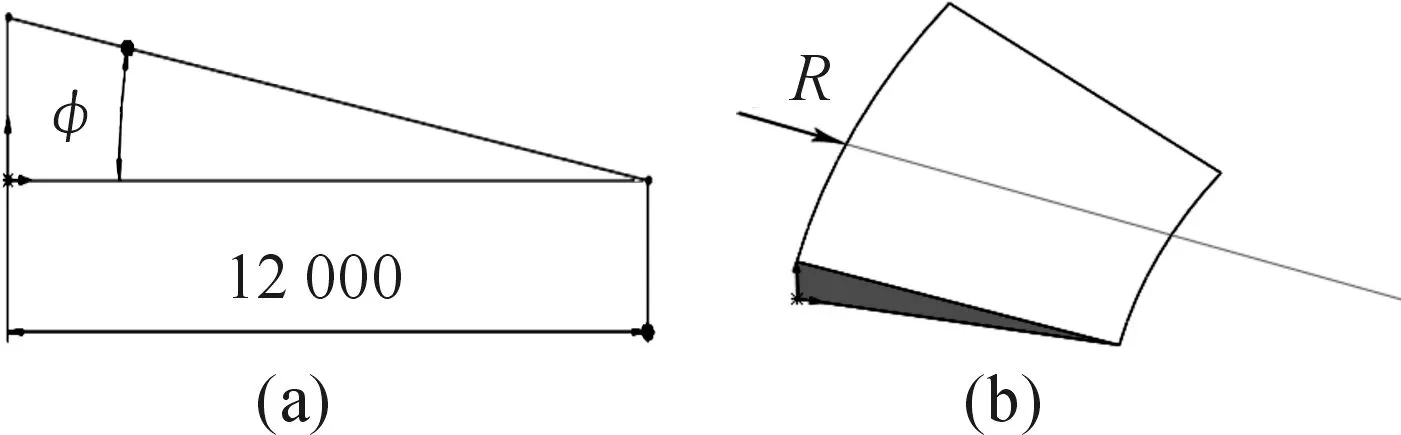
圖3 路面三維模型


表2 彎道半徑參數取值 m
2 轉彎安全性仿真檢測
車輛進入平曲線路段行駛時,通常處于減速行駛狀態,車輛受到離心力作用等原因極易出現側滑、失去轉向功能甚至側翻等現象。將小車分別與不同彎道傾角和彎道半徑的路面進行裝配,為后輪添加不同轉速的馬達,對汽車行駛路徑與線速度位移進行比較。通過對檢測數據進行分析判斷車輪與地面是否打滑。
2.1 建立仿真模型與三維碰撞關系
將地面設置為固定零部件,其余設置為運動零部件,在后輪的旋轉副添加運動,設置兩后輪為驅動輪。仿真模型如圖4~ 6所示。
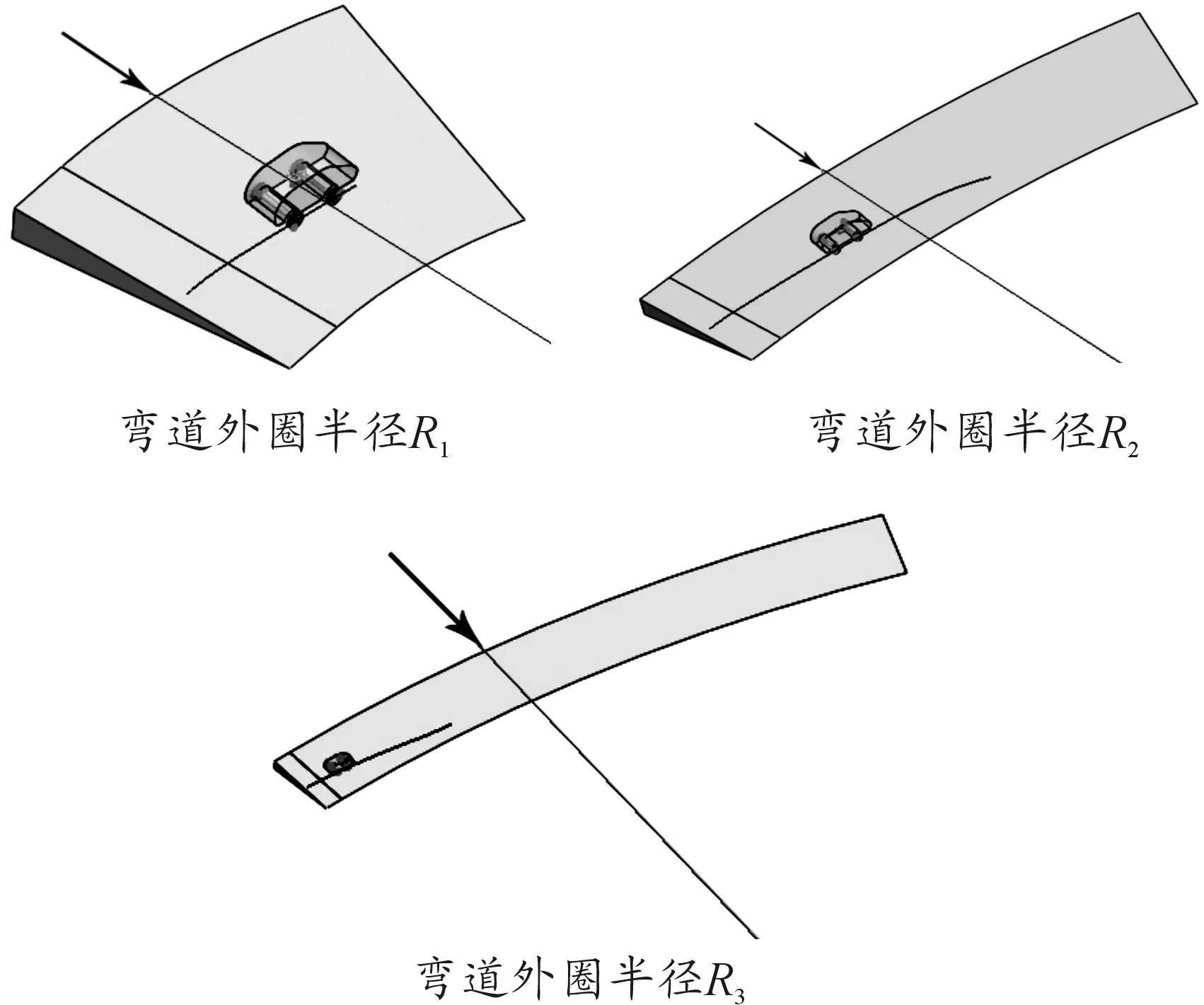
圖4 路面傾角ψ1仿真模型
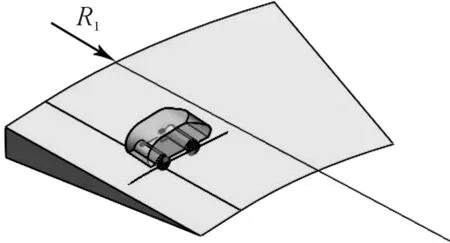
圖5 路面傾角ψ2、半徑R1仿真模型
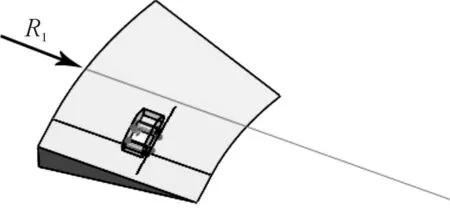
圖6 路面傾角ψ3、半徑R1仿真模型
將彎道半徑分別設置為R2、R3,建立出路面傾角ψ2、彎道半徑R2與路面傾角ψ2、彎道半徑R3的仿真模型。
將彎道半徑分別設置為R2、R3,分別建立出路面傾角ψ3、彎道半徑R2與路面傾角ψ3、彎道半徑R3的仿真模型。
行駛設置的要點是將4個車輪和地面設置為3D碰撞關系。通過給車輪和路面之間建立三維碰撞關系,設置車輪與地面的摩擦,摩擦力使得汽車行駛。
將地面設置為固定零件,其余零件設定為浮動零件,在后輪的旋轉副添加1個運動,設置2后輪為驅動輪。將4個車輪和地面之間設定為3D碰撞關系。碰撞參數設置為:碰撞剛度 100 000 N/mm,非線性剛度力指數2.2,接觸邊界的穿透深度0.1 mm。為使車輪與地面的相對運動。必須對車輪與地面的摩擦因數進行設定:靜摩擦臨界速度取0.1 mm/s,靜摩擦臨界因數0.4,動摩擦臨界速度取10 mm/s,動摩擦因數取0.3,仿真時間設置為11 s。
2.2 方向盤轉動函數設置
為方向盤添加一逆時針旋轉馬達,馬達位置為方向盤旋轉軸,馬達的運動方式選擇表達式如式(1)所示。
STEP(Time,0,0D,2,-10D)+
STEP(Time,2,-10D,4,5D)+
STEP(Time,8,-5D,10,-25D)
(1)
式(1)函數意義為:0~2 s為順時針轉動10°;2~4 s為逆時針轉動15°;8~10 s內為順時針轉動20°。
2.3 汽車仿真模型側滑及側翻判定
行駛的汽車因轉向操作不當,速度過快,使慣性離心力增大,極易引發車輪側滑。當橫向加速度過大,導致一邊的車輪與地面摩擦力為0時,甚至會發生側翻現象。將仿真模型中的車輛后輪轉速進行逐級增加,在SolidWorks中仿真模擬計算完畢后,測量車輛后輪行駛路徑的弧長,將該弧長與車輛后輪的線速度-時間圖像計算得出的位移進行比較,若是行駛路徑的弧長大于通過線速度-時間圖像計算得出的位移,則該汽車出現側滑現象,以該速度行駛時無法保證汽車安全通過該彎道。出現該情況時,觀察路面與車輪接觸情況,若有一邊車輪已經與路面脫離接觸,則發生側翻。若兩者近似相等,則認為以該速度行駛時能夠安全通過該彎道。
2.4 仿真結果分析
將汽車后輪的初始轉速設為85 r/min,置于彎道傾角為9.5°、彎道半徑100 m的路面。該仿真路段路面平整度良好,路面無其他障礙物,除該模型外,無其他汽車仿真模型在此路段仿真,對其造成干擾,且無橫風、路面積水等自然因素影響汽車與路面的摩擦力。
仿真時間與速度圖像的關系如圖7所示。
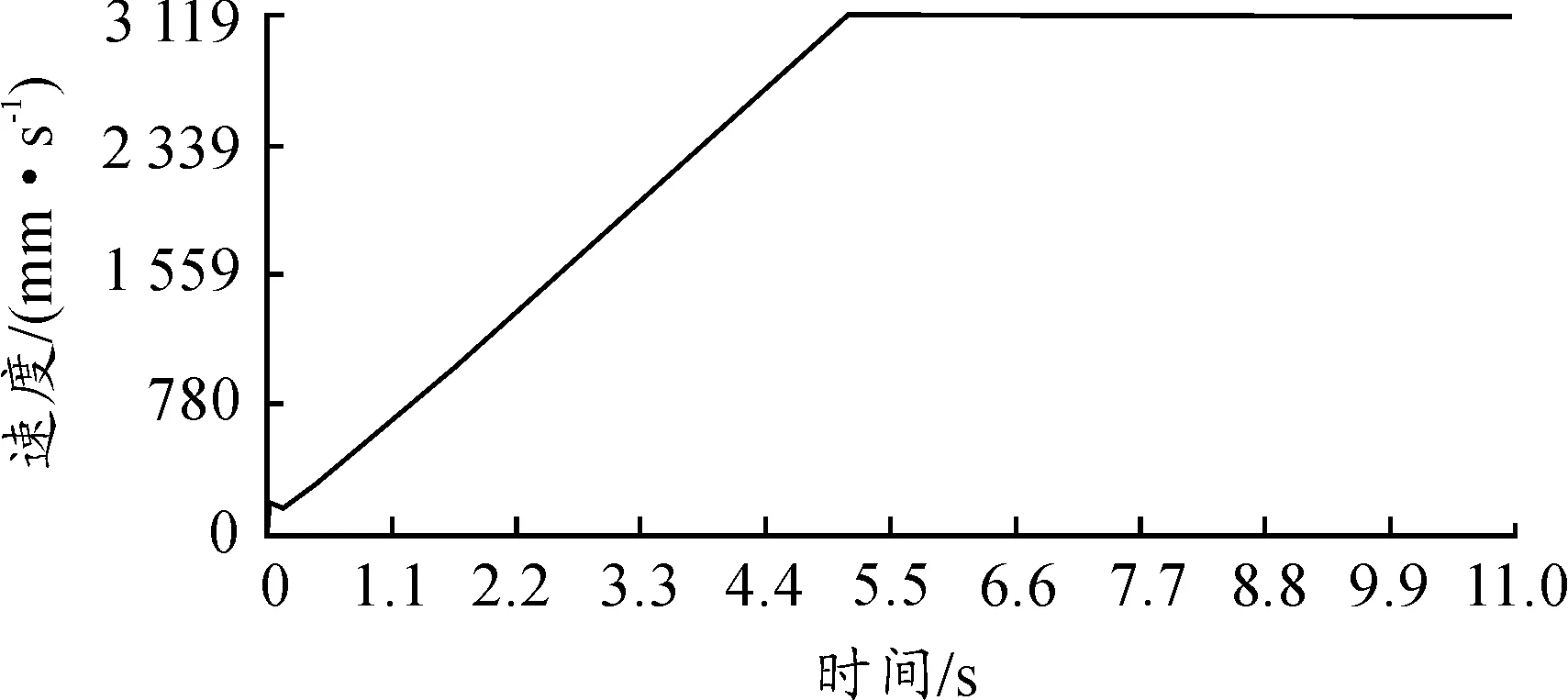
圖7 速度-時間圖像仿真結果
計算該圖像可知位移為26 355.55 mm,而通過行駛路徑測出的弧長為26 200 mm,所以當后輪轉速為85 r/min時并未出現側滑現象。將該轉速逐級遞增,直至轉速達到95 r/min時,車輪位移為 26 750 mm,而行駛路徑測量得出的位移為 26 918.17 mm,因此95 r/min為該仿真條件下的馬達臨界轉速,換算成車輛行駛速度為13 km/h。觀察車輪與地面接觸情況,如圖8、9所示,在0~2.6 s內車輛行駛于地面1,接觸力不為0;2.6~11 s內車輛行駛與地面2,接觸力同樣不為0,所以該行駛過程中并未發生側翻現象。
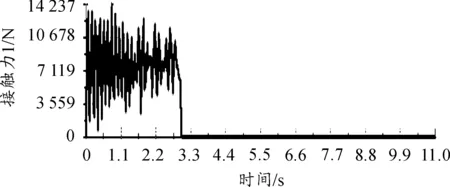
圖8 車輪-地面1接觸力
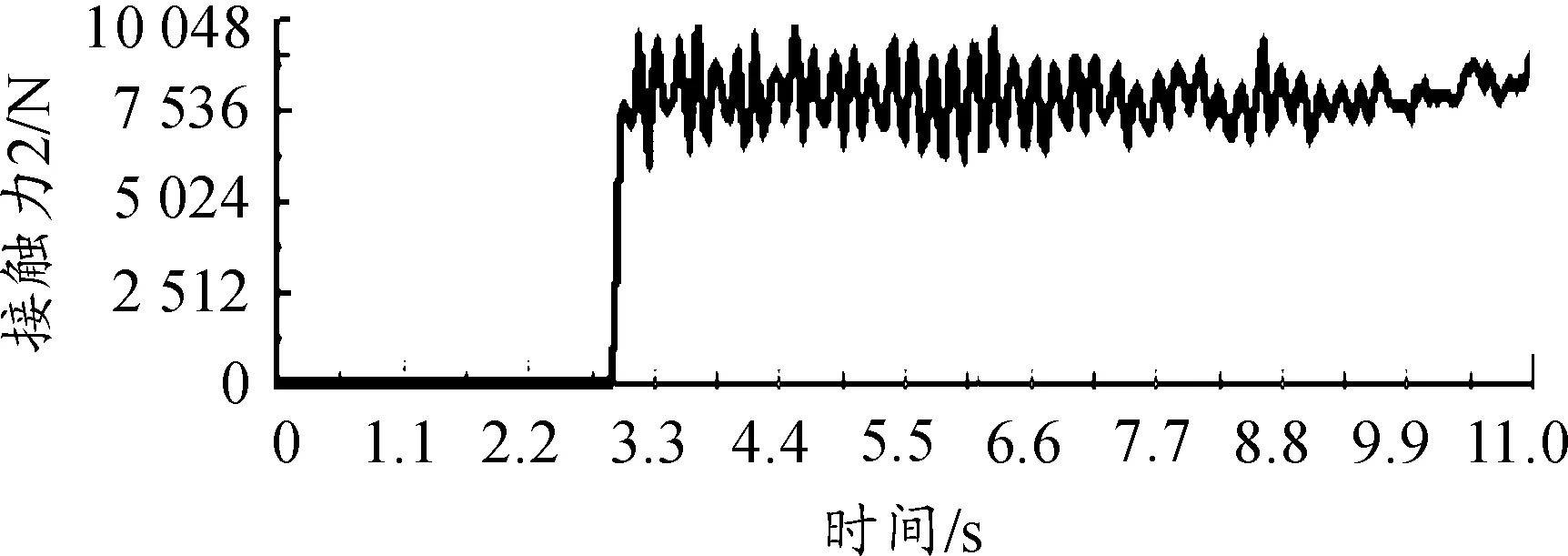
圖9 車輪-地面2接觸力
在相同的仿真條件下用該種方法對彎道半徑R1、路面傾角ψ1,彎道半徑R2、路面傾角ψ1,彎道半徑R3、路面傾角ψ1,彎道半徑R1、路面傾角ψ2,彎道半徑R2、路面傾角ψ2,彎道半徑R3、路面傾角ψ2,彎道半徑R1、路面傾角ψ3,彎道半徑R2、路面傾角ψ3,彎道半徑R3、路面傾角ψ3這9種道路條件下分別進行仿真并得出其側滑臨界值,如表3~5所示。

表3 路面傾角ψ1時的臨界速度

表4 路面傾角ψ2時的臨界速度

表5 路面傾角ψ3時的臨界速度
根據表3~5信息對比可知:當彎道半徑相同時,路面傾角越大,發生側滑時的臨界速度越大,因此可以適當增大路面傾角,減少車輛輪胎的磨損,降低車輛發生側滑的可能,避免車輛在進入彎道前大幅度減速產生的危險;當路面傾角相同時,彎道半徑越小側滑臨界速度越小,所以在城市道路中行駛時,速度不宜過快,城市道路的彎道半徑通常較小,如果車速過快,駛入彎道前需要大幅度減速,極易發生追尾事故;而在高速公路行駛時,車輛速度通常較快,為了避免車輛側滑,所以高速公路的彎道半徑通常較大。
3 結束語
本文通過三維軟件SolidWorks建立了汽車轉彎仿真模型,模擬汽車在斜面彎道轉向的運動過程,通過給輪胎和地面添加三維碰撞接觸和摩擦,實現車輪滾動帶動汽車行駛、顯示行駛軌跡、觀察車輛運動狀態。仿真計算結果的圖像很好地顯示了汽車在斜坡轉彎時啟動、轉向的過程。通過該軟件的計算分析,得出了不同路面傾角與不同彎道半徑側滑的臨界速度。比較可知,側滑臨界速度隨著彎道半徑和路面傾角的增加而增加對應數值,為更科學地制定汽車在通過不同路面傾角和彎道半徑道路的限速標準提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00