基于MEA-BP神經(jīng)網(wǎng)絡(luò)的壓氣機特性曲線預(yù)測
2019-03-19 04:40:24孫智濱
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2019年2期
關(guān)鍵詞:優(yōu)化
黃 偉,常 俊,孫智濱
(上海電力學(xué)院 自動化工程學(xué)院, 上海 200090)
燃?xì)廨啓C是一種重要的動力機械,被廣泛應(yīng)用于航空航天、輪船艦艇和火力發(fā)電等多個領(lǐng)域。針對燃?xì)廨啓C核心技術(shù)需要長期從國外進口的情況,燃機技術(shù)國產(chǎn)化勢在必行。采用模塊化建模的方式對燃?xì)廨啓C建立整體模型,可以得到相關(guān)的建模數(shù)據(jù),進而可以進行故障診斷、健康管理和狀態(tài)監(jiān)控等研究。可見,對燃?xì)廨啓C進行建模仿真并研究其性能特點具有很高的實用價值[1-2]。
在燃?xì)廨啓C的整體建模仿真中,壓氣機作為一個重要的組成部分,其流量和效率特性曲線的準(zhǔn)確性直接關(guān)系到發(fā)電機穩(wěn)態(tài)、瞬態(tài)過程模擬以及發(fā)電機與增壓器匹配計算的精度。但是,由于壓氣機特性曲線的可變性和離散不連續(xù)的特點,對該曲線的預(yù)測成為建模的重點和難點。因此,要根據(jù)有限的樣本數(shù)據(jù),借助合適的建模方法對壓氣機特性曲線進行預(yù)測,得出變工況條件下不同轉(zhuǎn)速所對應(yīng)的流量和效率,進而為后期燃?xì)廨啓C的整體建模打下基礎(chǔ)。
壓氣機的特性曲線基本都是在額定工況下通過試驗的方法得到的,變工況的情況下,試驗測得的數(shù)據(jù)更加離散化,不利于后期的統(tǒng)計與分析。崔茂佩[3]通過人為劃分依據(jù)線,確定等轉(zhuǎn)速線的擬合區(qū)域,利用二步一元方法分別擬合;張東陽[4]利用插值函數(shù)法和最小二乘法對壓氣機特性曲線做第一步和第二步擬合,并對不同擬合冪次所得結(jié)果進行比較。目前大多方法都存在泛化能力不足的特點。
思維進化算法(mind evolutionary algorithm,MEA)作為一種改進的種群優(yōu)化算法,具有全局尋優(yōu)的能力,可以改善神經(jīng)網(wǎng)絡(luò)的收斂速度和精度,已被使用于疾病研究、發(fā)電機故障分析、變壓器故障診斷和電廠主氣溫控制等多個領(lǐng)域[5-7]。在神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值范圍內(nèi),通過MEA的多次“趨同”與“異化”操作進行全局尋優(yōu),將得到的全局最優(yōu)解應(yīng)用于BP神經(jīng)網(wǎng)絡(luò)的初始值中。實踐證明,使用MEA優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)方法能夠提高擬合和預(yù)測的準(zhǔn)確性,并且具有很強的記憶功能,提升了模型的泛化能力,適合于預(yù)測不同轉(zhuǎn)速下的壓氣機特性曲線[8]。
為了彌補BP神經(jīng)網(wǎng)絡(luò)的不足,筆者擬將MEA引入壓氣機特性曲線預(yù)測,采用MEA優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值,探討MEA優(yōu)化后的BP神經(jīng)網(wǎng)絡(luò)在壓氣機特性曲線預(yù)測模型中的精度和泛化能力,為后期燃?xì)廨啓C整體模型的建立和仿真做好準(zhǔn)備。
1 燃?xì)廨啓C模型
利用Matlab/Simulink建立某重型燃?xì)廨啓C整體模型,作為穩(wěn)、動態(tài)仿真的框架基礎(chǔ)。模型如圖1所示。
圖1所示模型為采用模塊化建模搭建的燃?xì)廨啓C整體模型,分為壓氣機模塊、燃燒室模塊和透平模塊。壓氣機模塊的輸入?yún)?shù)有溫度、壓力、轉(zhuǎn)速和壓比。輸出參數(shù)主要為空氣流量,該輸出參數(shù)在燃?xì)廨啓C整體模型的分析中至關(guān)重要。通過對壓氣機特性曲線的處理和預(yù)測,得到非設(shè)計工況、任意轉(zhuǎn)速條件下的空氣流量,進而得出燃燒室的進氣量,為后續(xù)燃燒室和透平的建模研究打下基礎(chǔ)[9-11]。
為了得到滿足該整體模型的壓氣機特性曲線預(yù)測結(jié)果,本文分別采用BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)進行優(yōu)化,并對結(jié)果進行對比分析。
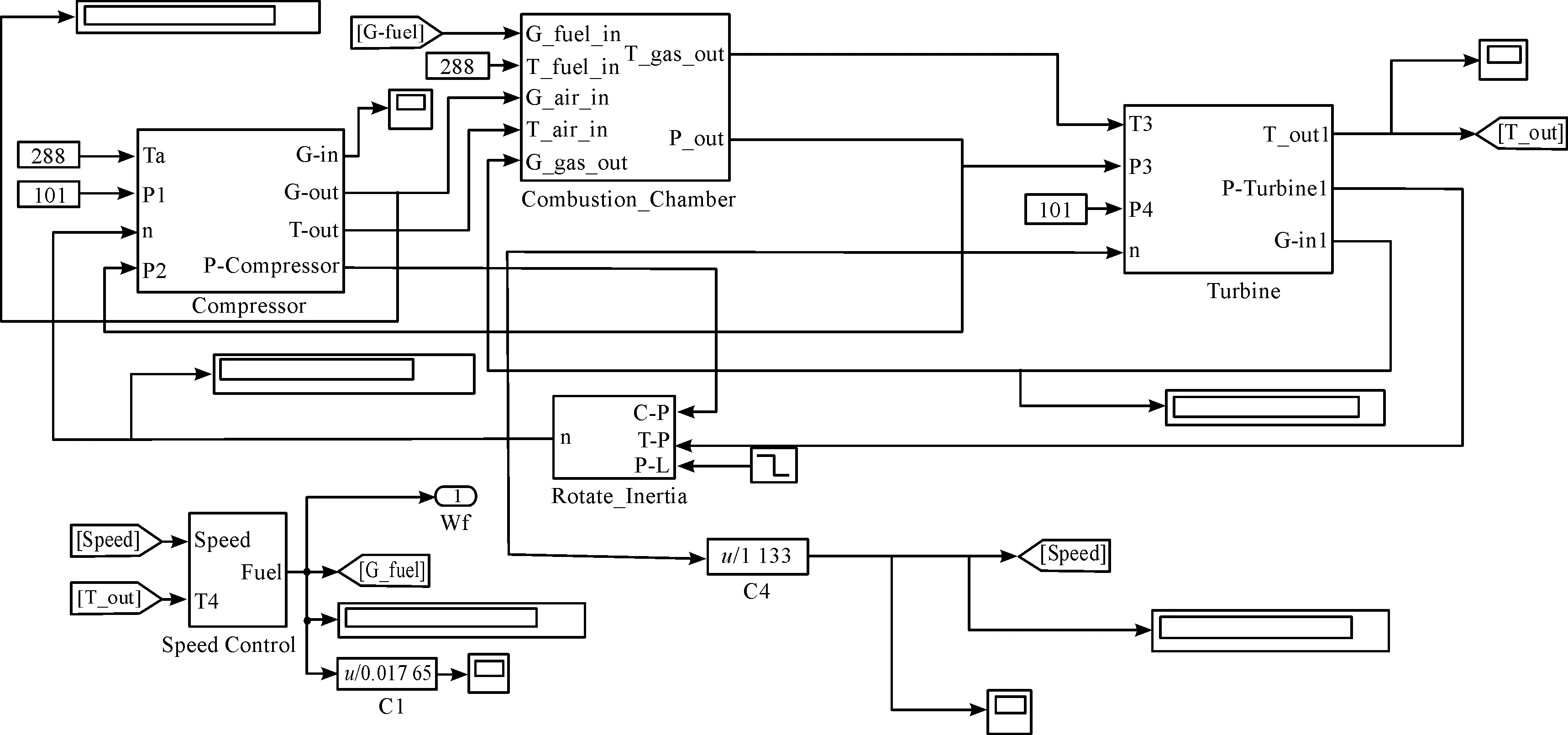
圖1 某重型燃?xì)廨啓C整體模型
2 MEA-BP神經(jīng)網(wǎng)絡(luò)
2.1 BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)是一種多層前饋神經(jīng)網(wǎng)絡(luò)模型,該網(wǎng)絡(luò)的主要特點是信號前向傳遞,誤差反向傳播。BP神經(jīng)網(wǎng)絡(luò)采用反向傳播算法作為學(xué)習(xí)算法,激活函數(shù)通常采用連續(xù)可導(dǎo)的S型函數(shù),隨著激活函數(shù)的不同會推算出不同的權(quán)值調(diào)整公式。如果輸出層得不到期望輸出,則轉(zhuǎn)入反向傳播,根據(jù)預(yù)測誤差調(diào)整網(wǎng)絡(luò)權(quán)值和閾值,從而使 BP 神經(jīng)網(wǎng)絡(luò)預(yù)測輸出不斷逼近期望輸出。BP神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖2所示。
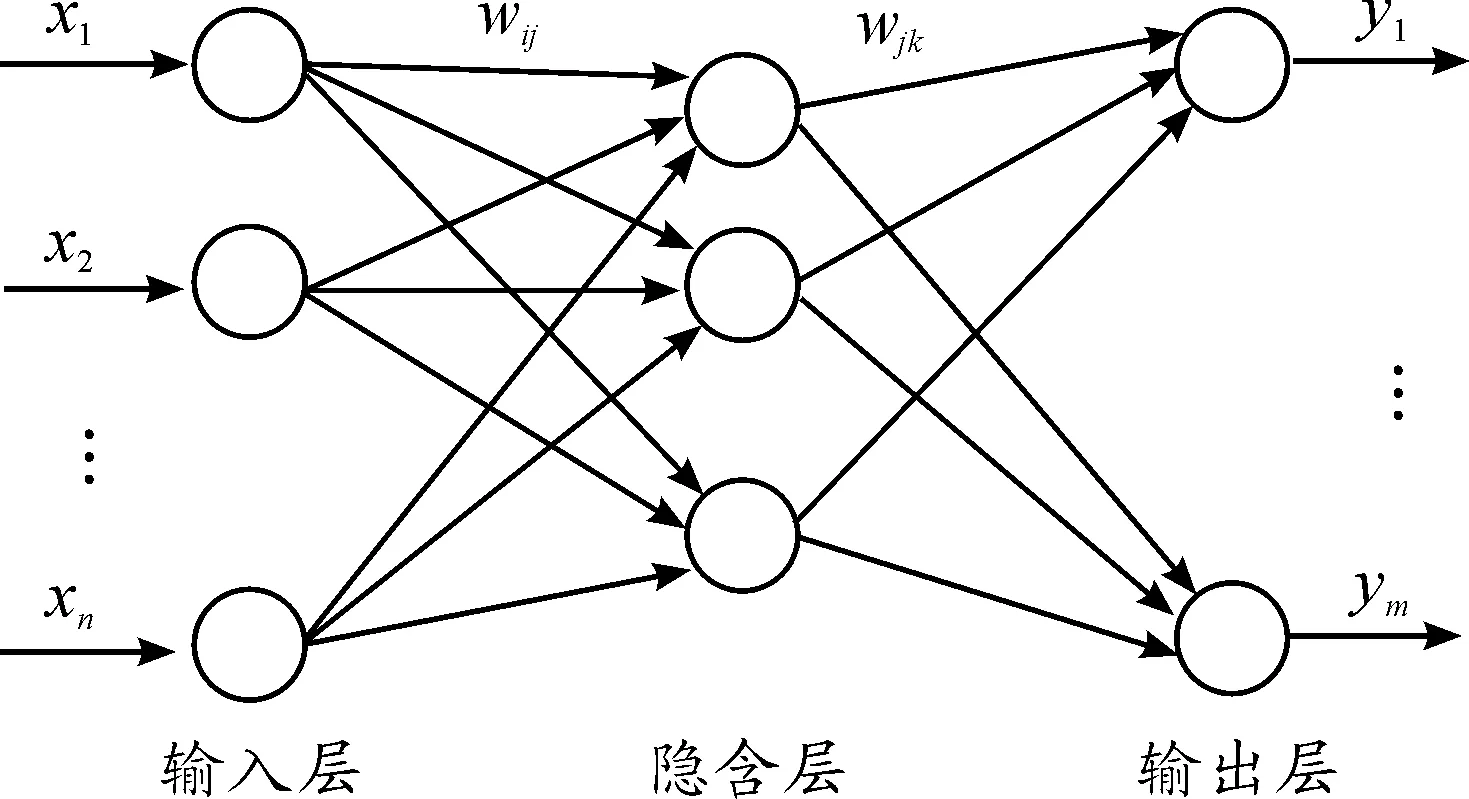
圖2 BP神經(jīng)網(wǎng)絡(luò)的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
由圖2可知,BP神經(jīng)網(wǎng)絡(luò)可以看成是一個非線性函數(shù),網(wǎng)絡(luò)輸入值和預(yù)測值分別為該函數(shù)的自變量和因變量[12-13]。對于3層神經(jīng)網(wǎng)絡(luò),具體的訓(xùn)練過程如下:
1) 初始化網(wǎng)絡(luò)
確定輸入維數(shù)n、輸出維數(shù)m和隱含層節(jié)點數(shù)l,初始化權(quán)值和閾值。
2) 計算隱含層輸出
(1)
式中:f為神經(jīng)元激勵函數(shù);wij為隱含層神經(jīng)元間的連接權(quán)值;a為隱含層閾值。
3) 計算輸出層
(2)
式中:wjk為隱含層與輸出層神經(jīng)元之間的連接權(quán)值;b為輸出層閾值。
4) 誤差計算
ek=Ok-Yk
(3)
5) 權(quán)值更新
(4)
wjk=wjk+ηHjek
(5)
6) 閾值更新
(6)
bk=bk+ek
(7)
7) 判斷算法迭代是否結(jié)束;若未結(jié)束,則返回步驟2)。
2.2 MEA-BP神經(jīng)網(wǎng)絡(luò)
2.2.1 思維進化算法
思維進化算法(MEA)沿襲了遺傳算法的一些基本概念,其基本框架如圖3所示。

圖3 思維進化算法系統(tǒng)結(jié)構(gòu)
由圖3可知,思維進化算法主要由以下4個環(huán)節(jié)組成:群體和子群體、公告板、趨同和異化。其中,趨同和異化過程是思維進化算法的核心部分,代替了遺傳算法中交叉和變異這2種遺傳算子,決定著該算法的精度和記憶能力。
2.2.2 MEA優(yōu)化過程
思維進化算法的設(shè)計思路就是對BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和閾值進行優(yōu)化。首先,根據(jù) BP 神經(jīng)網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu),將解空間映射到編碼空間,每個編碼對應(yīng)問題的一個解。然后,選取訓(xùn)練集的均方誤差的倒數(shù)作為各個個體與種群的得分函數(shù)。利用思維進化算法,通過不斷迭代,輸出最優(yōu)個體,并以此作為初始權(quán)值和閾值,訓(xùn)練BP神經(jīng)網(wǎng)絡(luò)[7-8]。其優(yōu)化過程如下:
1) 根據(jù)BP神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),將解空間映射到編碼空間。編碼長度為
s=nl+ml+l+m
(8)
2) 定義迭代次數(shù)iter、種群大小popsize、預(yù)分配優(yōu)勝子群體bestsize和臨時子群體tempsize大小。子群體SG大小為:
(9)
3) 選取各個個體和種群的得分函數(shù)val。
(10)
SE=mse(T-A2)
(11)
式中:A2為每次迭代后輸出層的輸出值;T為期望輸出;SE為均方差。
4) 不斷進行迭代,輸出最優(yōu)個體,并以此作為BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值,訓(xùn)練網(wǎng)絡(luò)。
該算法的具體流程如圖4所示。
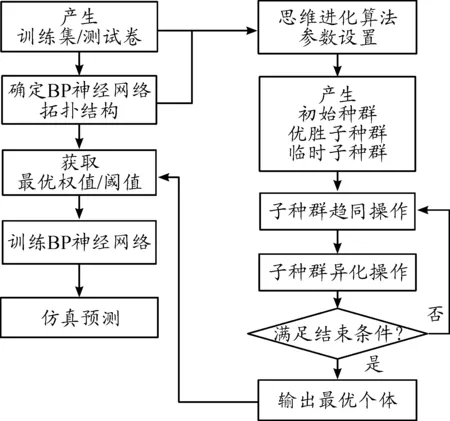
圖4 算法流程
當(dāng)滿足迭代停止條件時,思維進化算法結(jié)束優(yōu)化過程。此時,根據(jù)編碼規(guī)則,對尋找到的最優(yōu)個體進行解析,從而得到對應(yīng)的BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值。將優(yōu)化得到的權(quán)值和閾值作為BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和閾值,并利用訓(xùn)練集樣本對BP神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練、學(xué)習(xí)。與傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)相同,訓(xùn)練完成后,可輸入測試集樣本進行仿真預(yù)測,并可進行結(jié)果分析和討論。
3 非線性函數(shù)
為了驗證采用BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)進行預(yù)測時的隨機性,采用式(12)所示的非線性函數(shù)進行擬合[14]。該函數(shù)的圖形如圖5所示。
(12)
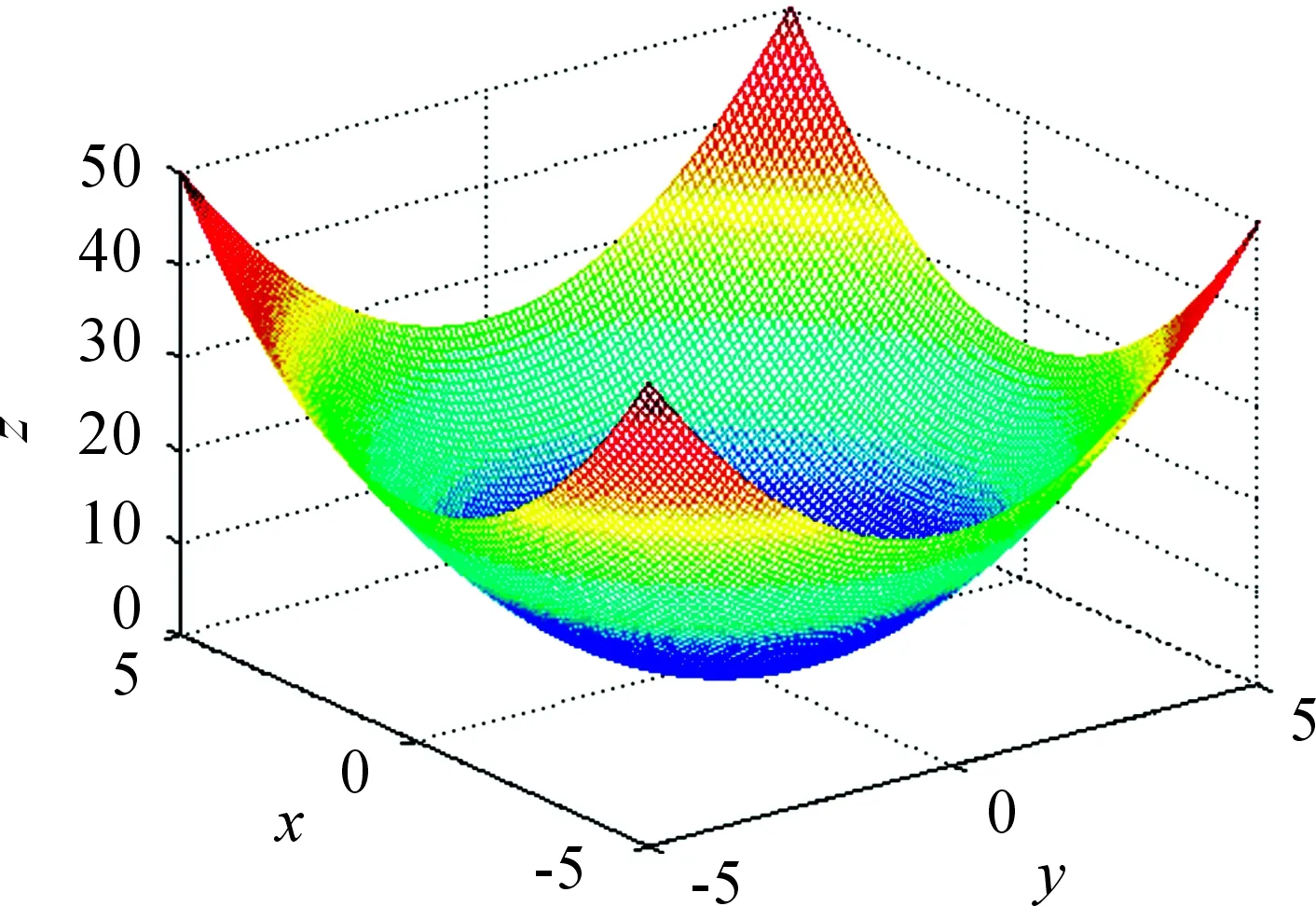
圖5 非線性函數(shù)圖形
此處的BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練用非線性函數(shù)的輸入和輸出數(shù)據(jù)訓(xùn)練神經(jīng)網(wǎng)絡(luò),使訓(xùn)練后的網(wǎng)絡(luò)能預(yù)測非線性函數(shù)輸出。從式(12)得到2 000組輸入輸出數(shù)據(jù),由中挑選1 900組作為訓(xùn)練集,剩下的100組數(shù)據(jù)作為測試集。BP神經(jīng)網(wǎng)絡(luò)算法流程如圖6所示。
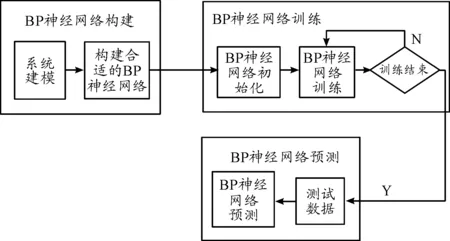
圖6 BP神經(jīng)網(wǎng)絡(luò)算法流程
分別用訓(xùn)練好的BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測函數(shù)輸出,預(yù)測誤差百分比如圖7所示。

圖7 BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測誤差百分比
由圖7可知,對于式(12)給出的非線性函數(shù),BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果的誤差百分比都維持在0%上下,精度均較高,符合壓氣機特性曲線預(yù)測的使用要求。但是,二者相比而言,采用BP神經(jīng)網(wǎng)絡(luò)的預(yù)測誤差百分比最大能夠達(dá)到-3%附近,而采用MEA-BP神經(jīng)網(wǎng)絡(luò)的預(yù)測誤差百分比最大只在-0.5%附近,可見采用MEA優(yōu)化后的BP神經(jīng)網(wǎng)絡(luò)具有更好的精度,更加適合實際應(yīng)用。下文將分別利用這2種方法對壓氣機特性曲線進行預(yù)測和分析。
4 實例分析
本文利用Matlab中的神經(jīng)網(wǎng)絡(luò)工具箱建立BP神經(jīng)網(wǎng)絡(luò),采用MEA對BP神經(jīng)網(wǎng)絡(luò)進行優(yōu)化,對壓氣機特性曲線進行擬合和預(yù)測。圖8是某型軸流式壓氣機特性曲線,其中橫坐標(biāo)表示折合流量,縱坐標(biāo)表示壓比。
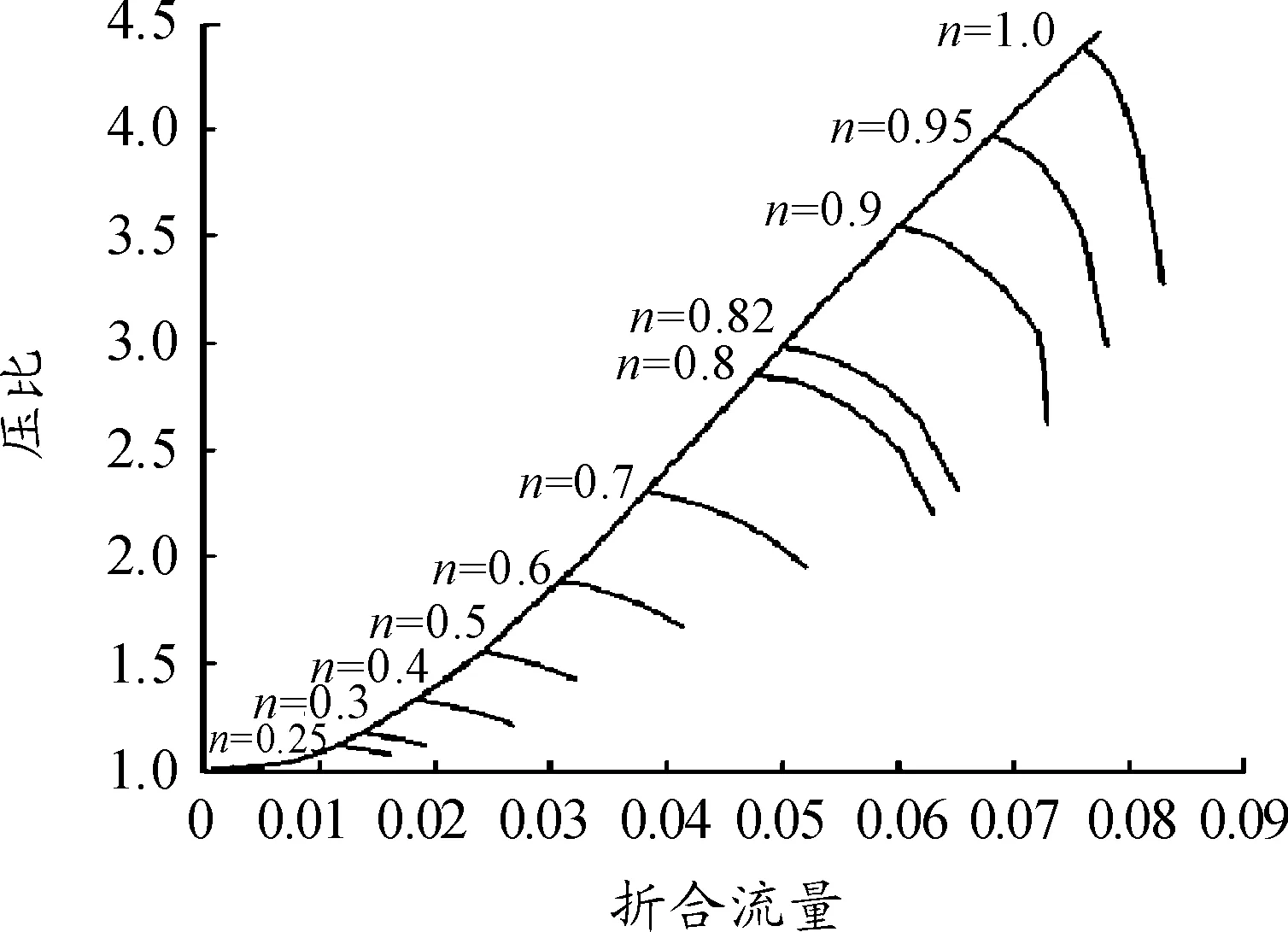
圖8 某型軸流式壓氣機特性曲線
由圖8可知,圖中共有11條等轉(zhuǎn)速線,分別取轉(zhuǎn)速n=0.9、0.8、0.7、0.6、0.5、0.4、0.3上的樣本數(shù)據(jù)作為神經(jīng)網(wǎng)絡(luò)的訓(xùn)練集,每條等轉(zhuǎn)速線上取6個點,而將轉(zhuǎn)速n=0.95、0.82、0.25上的樣本數(shù)據(jù)作為檢驗數(shù)據(jù)。其中,n=0.95作為高轉(zhuǎn)速樣本外插值,n=0.82為樣本內(nèi)插值,n=0.25作為低轉(zhuǎn)速樣本外插值。
經(jīng)過數(shù)據(jù)歸一化處理,分別進行BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)的預(yù)測。
4.1 BP神經(jīng)網(wǎng)絡(luò)
在沒有先進算法優(yōu)化的情況下,運行獨立的BP神經(jīng)網(wǎng)絡(luò)進行計算,BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果如圖9所示。
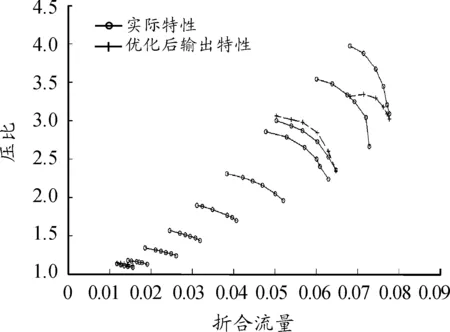
圖9 BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果
圖9中,“○”線為訓(xùn)練樣本數(shù)據(jù)的擬合結(jié)果,“+”線分別為轉(zhuǎn)速n=0.95、0.82、0.25時BP神經(jīng)網(wǎng)絡(luò)的預(yù)測結(jié)果。
由圖9分析可知,對于低轉(zhuǎn)速樣本外插值n=0.25和樣本內(nèi)插值n=0.82,獨立的BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果具有較低的相對誤差,但是對于高轉(zhuǎn)速樣本外插值n=0.95時的誤差較大。由此可知,BP神經(jīng)網(wǎng)絡(luò)的泛化能力主要針對輸入和輸出數(shù)據(jù)都在最大值范圍內(nèi),即低轉(zhuǎn)速樣本外插值和樣本內(nèi)插值,如果是高轉(zhuǎn)速樣本外插值,則會有比較高的輸出誤差。
4.2 MEA-BP神經(jīng)網(wǎng)絡(luò)
為了獲得更高的預(yù)測精度和更好的泛化能力,采用MEA優(yōu)化算法對BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值進行優(yōu)化。相比其他種群類優(yōu)化算法,MEA具有特有的趨同過程,使優(yōu)化結(jié)果更加準(zhǔn)確。針對本案例,MEA優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)初始優(yōu)勝子種群和臨時子種群的趨同過程如圖10所示。
由圖10可知,經(jīng)過若干次趨同操作,各子種群均已成熟,即得分不再增加。同時,優(yōu)勝子種群和臨時子種群成熟后,臨時子種群中的子種群5的得分比優(yōu)勝子種群中的一部分子種群得分高,而優(yōu)勝子種群中的子種群5的得分比臨時子種群中的一部分子種群得分低。對于這種情況需要執(zhí)行一次“異化”操作,同時要補充一個新的子種群到臨時子種群中。經(jīng)過“趨同”和“異化”過程,完成MEA對權(quán)值和閾值的優(yōu)化。
MEA優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)經(jīng)過訓(xùn)練后,預(yù)測結(jié)果如圖11所示。
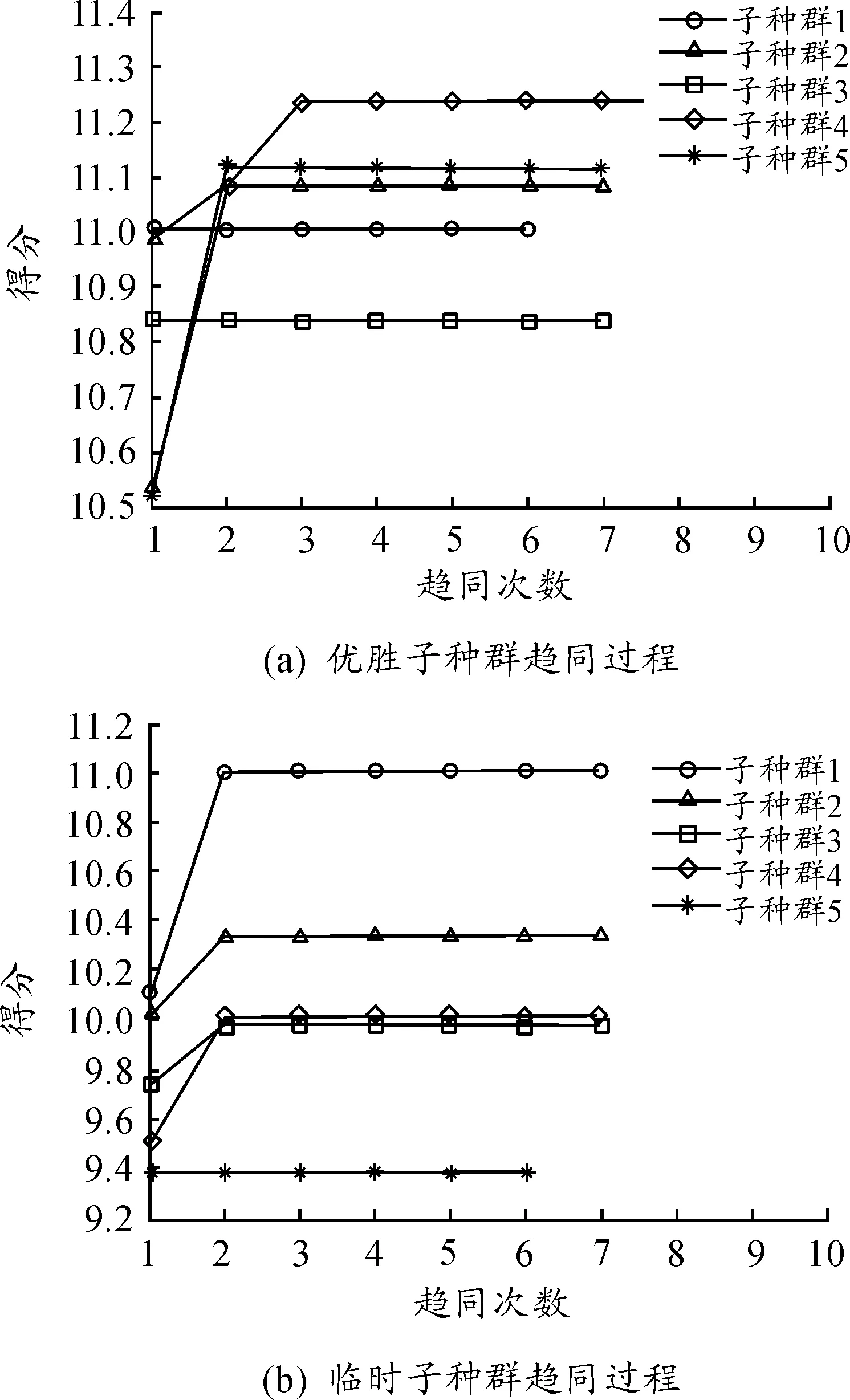
圖10 MEA-BP趨同過程
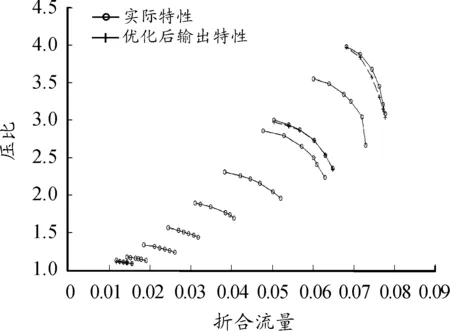
圖11 MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果
圖11中,“○”線為訓(xùn)練樣本數(shù)據(jù)的擬合結(jié)果,“+”線分別為轉(zhuǎn)速n=0.95、0.82、0.25時BP神經(jīng)網(wǎng)絡(luò)的預(yù)測結(jié)果。
通過對圖11分析可知,采用MEA優(yōu)化后的BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果誤差大多維持在1%以下,具有較好的精度;同時,針對不同的樣本外插值和樣本內(nèi)插值都有比較不錯的結(jié)果,具有較好的泛化能力。
4.3 誤差分析
為了分析BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果的準(zhǔn)確性和泛化能力,將具體的實際特性圖數(shù)據(jù)和2種方法的預(yù)測數(shù)據(jù)結(jié)果統(tǒng)計如表1所示,并將BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測結(jié)果的相對誤差百分比進行對比分析。
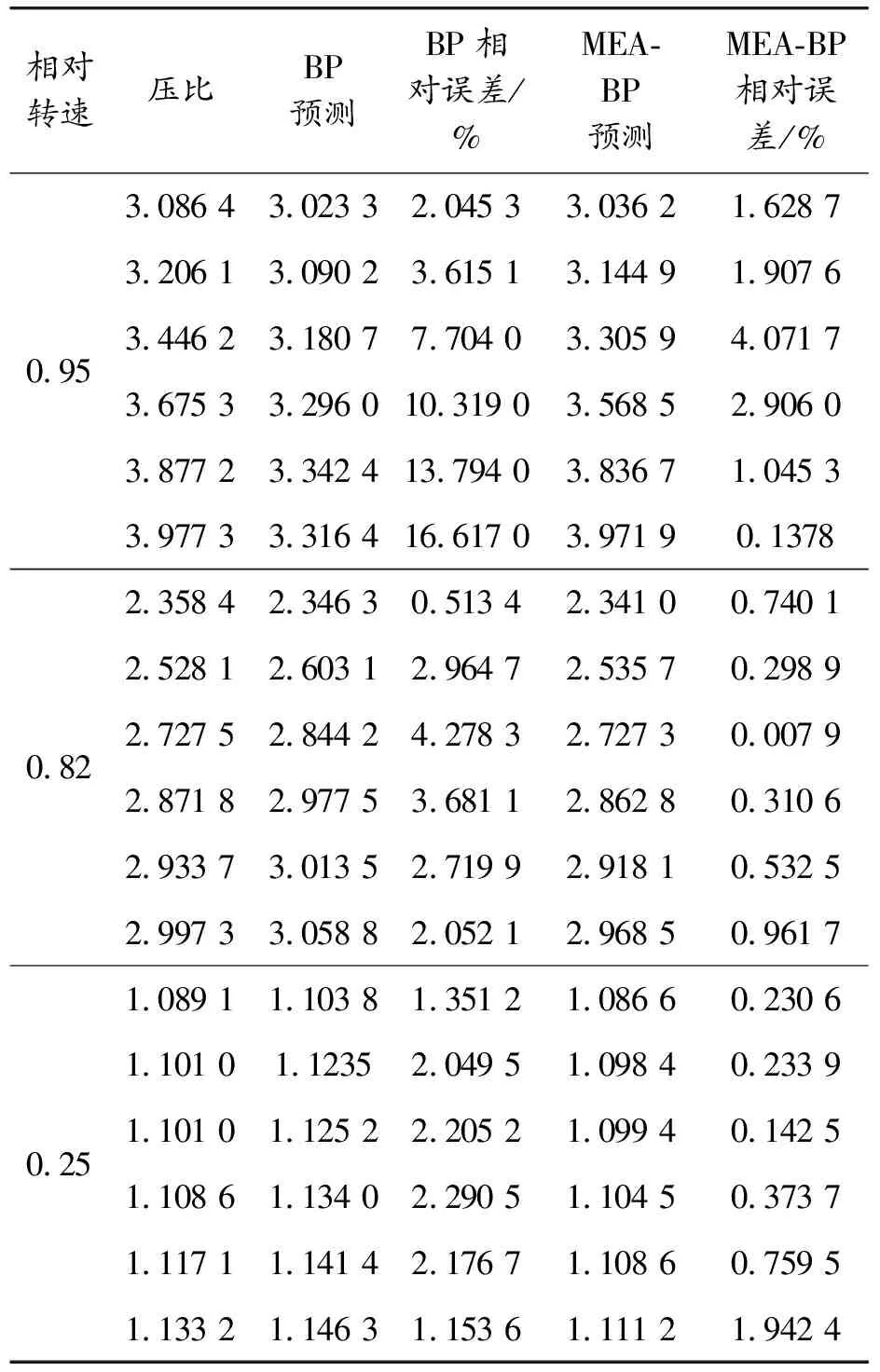
表1 BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測與實際數(shù)據(jù)對比
由表1分析可知,采用BP神經(jīng)網(wǎng)絡(luò)進行預(yù)測時,所得相對誤差大多大于2%,其中對于樣本內(nèi)插值和低轉(zhuǎn)速樣本外插值的相對誤差在2%左右,對于高轉(zhuǎn)速樣本外插值的相對誤差均大于2%,甚至達(dá)到了16%。可見,BP神經(jīng)網(wǎng)絡(luò)的泛化能力主要針對輸入和輸出數(shù)據(jù)都在最大值范圍內(nèi),即低轉(zhuǎn)速樣本外插值和樣本內(nèi)插值。如果是高轉(zhuǎn)速樣本外插值,則會有比較高的輸出誤差,不適用于燃?xì)廨啓C的實際工況。
采用MEA-BP神經(jīng)網(wǎng)絡(luò)進行預(yù)測時,所得相對誤差小于1%。對于高轉(zhuǎn)速樣本外插值,雖然其誤差在1.5%上下,略高于樣本內(nèi)插值和低轉(zhuǎn)速樣本外插值的結(jié)果,但是相比BP神經(jīng)網(wǎng)絡(luò)而言,采用MEA優(yōu)化過的BP神經(jīng)網(wǎng)絡(luò)的相對誤差降低了很多。可見,相比BP神經(jīng)網(wǎng)絡(luò),采用MEA-BP神經(jīng)網(wǎng)絡(luò)得出的壓氣機特性曲線預(yù)測具有更好的精度和泛化能力,更適用于燃?xì)廨啓C建模。
5 結(jié)論
1) 首次將思維進化算法(MEA)引入壓氣機特性曲線預(yù)測中,分別通過BP神經(jīng)網(wǎng)絡(luò)和MEA-BP神經(jīng)網(wǎng)絡(luò)進行壓氣機特性曲線計算,得到了相應(yīng)的預(yù)測結(jié)果。
BP神經(jīng)網(wǎng)絡(luò)的泛化能力主要針對輸入和輸出數(shù)據(jù)都在最大值范圍內(nèi),即低轉(zhuǎn)速樣本外插值和樣本內(nèi)插值。如果是高轉(zhuǎn)速樣本外插值,則會有比較高的輸出誤差。MEA-BP神經(jīng)網(wǎng)絡(luò)相比以上2種方法具有明顯的優(yōu)勢。采用MEA優(yōu)化過的神經(jīng)網(wǎng)絡(luò),預(yù)測結(jié)果誤差大多維持在1%以下,具有很好的精度;并且針對不同的樣本外插值和樣本內(nèi)插值,都有比較不錯的結(jié)果。
經(jīng)過對預(yù)測結(jié)果的對比分析,發(fā)現(xiàn)利用MEA算法優(yōu)化過的BP神經(jīng)網(wǎng)絡(luò)預(yù)測效果較好,并且具有很強的泛化能力。
2) 非設(shè)計工況下的壓氣機特性曲線可以通過神經(jīng)網(wǎng)絡(luò)計算獲得,并且思維進化算法(MEA)能適用于燃?xì)廨啓C壓氣機特性曲線的預(yù)測。在其優(yōu)化的情況下,BP神經(jīng)網(wǎng)絡(luò)也具有更高的實用價值,適合于壓氣機的實際運行分析,有利于燃?xì)廨啓C整體模型的建立與仿真,有助于燃?xì)廨啓C機組的運行優(yōu)化。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45