運用灰色預測與模糊加權PID的反應釜溫度控制
2019-03-19 04:40:26魏小宇
重慶理工大學學報(自然科學) 2019年2期
魏小宇,鄭 晟
(太原理工大學 電氣與動力工程學院, 太原 030024)
PID反應釜在工業中有著廣泛的應用,尤其在化工、煤焦、醫藥等領域,是工業領域需求量最大的一類反應加熱容器[1]。反應釜溫度控制效果的提升和精度的提高有重要的意義。如何提高溫度控制效果,滿足多種系統的不同控制要求是一個重要的研究課題。
本文以反應釜為研究對象,該反應釜通過電加熱完成加熱,后期通過自然冷卻實現降溫。
由于控制的滯后性、非線性、時變性,反應釜是最難控制的溫度系統之一。反應釜通過傳熱加熱釜內物料,所以有很大的滯后性,而且傳統的控制方式以PID算法為主,參數固定不變,前期響應速度慢,跟隨性差,后期超調量大,這些都會使反應釜的溫度難以按照設定曲線過渡。灰色預測通過對已有數據尋找規律來預測系統未來行為,很適用大滯后系統[2-5]。模糊控制不依賴精確的系統模型,仿照人的經驗進行控制,對于非線性、時變系統控制效果很好,具有較強的魯棒性和適應性[6-10]。加權PID加入設定值權重作用,可以有效調節跟隨性和超調量,具有較好的穩定性[11-12]。綜合考慮,本文提出一種運用灰色預測和模糊PID的控制方式,以西門子S7-1500和WINCC7.3構建監控系統,并通過試驗驗證該控制方式的有效性。
1 基于灰色預測模糊PID控制器設計
基于灰色預測與模糊PID的控制器結構如圖1所示。在反饋回路中建立灰色預測模型預測下一時刻的溫度,給控制器提供超前的信息便于控制器做出超前控制。模糊加權PID結合了模糊控制與加權PID的優點,該控制器根據預測模型提供的預測溫度與設定值作比較,得出誤差及誤差變化率,然后根據模糊規則在線調整PID的比例系數和權重系數,使其具有良好的跟隨性和適應性。圖1為模糊加權PID控制器結構,其中:SP為設定溫度;PV為過程溫度;CV為加權PID輸出。
1.1 反應釜溫度灰色預測模型及驗證
1.1.1 反應釜溫度灰色預測模型
灰色理論以部分信息已知的小樣本不確定系統為研究對象,通過對部分已知信息的開發提取,實現對未來變化的定量預測[13]。本文以反應釜運行時的溫度作為原始數據,建立GM(1,1)模型預測系統下一步溫度。模型的精度與原始數據的取舍相關[14]。為了不斷把進入系統的擾動考慮進去,采用等維新息滾動預測的思想,即GM(1,1)模型不斷把新數據加入原始數據中,但這會造成原始數據過于龐大,因此在每加入一個新數據的同時就剔除一個舊數據,保持維數不變。預測模型推導過程如下:
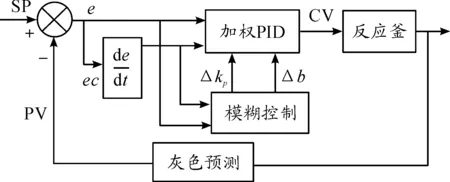
圖1 模糊加權PID控制器
反應釜加熱時取實測溫度建立原始數據序列:T(0)=(t(0)(1),t(0)(2),…,t(0)(n)),T(0′)為T(0)的1-AGO序列:T(0′)=(t(0′)(1),t(0′)(2),…,t(0′)(n)),其中
(1)
對T(0′)進行緊鄰均值運算,得到T(0′)的均值序列:
T(1)=(t(1)(1),t(1)(2),…,t(1)(n))
t(1)(k)=0.5(t(0′)(k)+t(0′)(k-1))
k=2,3,…,n
(2)
GM(1,1)模型的均值形式為:
t(0)(k)+at(1)(k)=b
(3)
GM(1,1)的均值形式的影子方程為
(4)
(5)
其中Y、B分別為:
(6)
式(4)的時間響應式為:
k=1,2,…,n
(7)

(8)
對應等維新息GM(1,1)的預測模型為
(e-a(m+k1-1)-e-a(m+k1-2))
(9)
式中:h為采樣時刻;m為原始數據序列維數;k1為預測步數。
1.1.2 灰色預測模型仿真驗證
圖2為灰色預測模型預測溫度與實際溫度的比較,圖3為圖2的局部放大。可見該模型的平均相對誤差為0.859%。平均相對誤差反映了模型的預測精度[13-14],從預測結果來看該灰色預測模型可以用來預測反應釜的溫度變化。
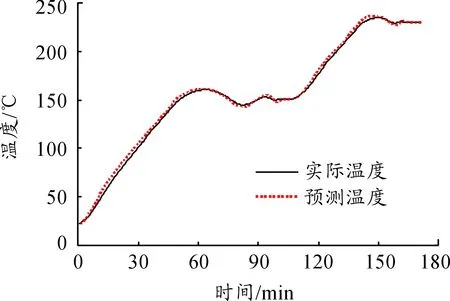
圖2 灰色預測模型預測與實際值比較
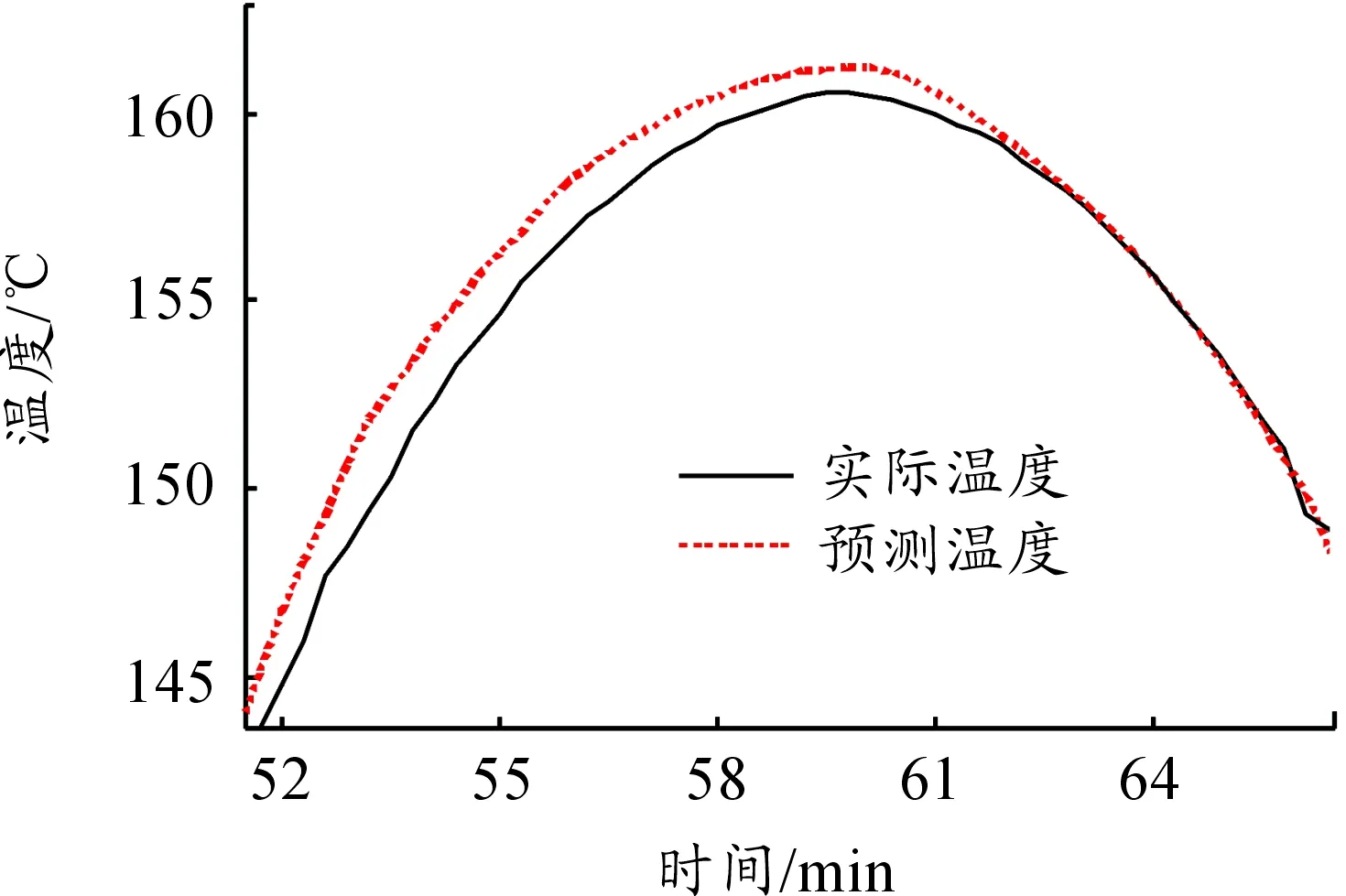
圖3 灰色預測模型預測與實際值局部比較
1.2 模糊加權PID控制
1.2.1 加權PID
加入權重的PID數學表達式可描述為
(10)
式(10)符號說明如表1所示。
表1 加權PID公式符號說明
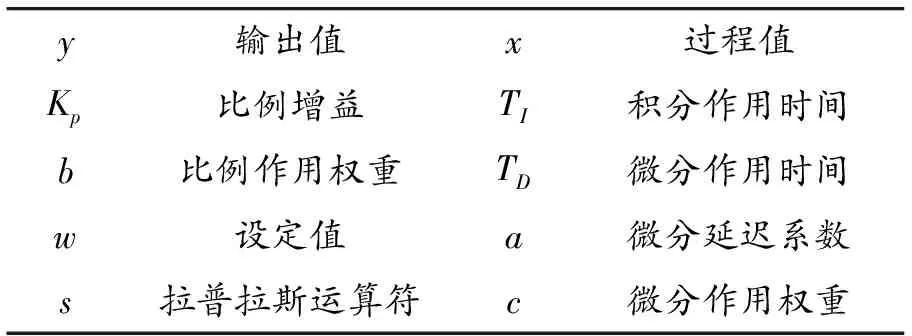
y輸出值x過程值Kp比例增益TI積分作用時間b比例作用權重TD微分作用時間w設定值a微分延遲系數s拉普拉斯運算符c微分作用權重
加權PID在傳統PID算法的基礎上加入了設定值權重作用,為了獲得抗干擾性最優同時有良好的跟隨性,可以先用ZN法整定PID參數使抗干擾性最優,再對設定值權重進行調整,優化其跟隨性[15]。為了加強適應性,采用模糊控制對權重b進行調解,同時調整PID的比例系數Kp。
1.2.2 模糊控制算法
模糊控制不需要依賴精確的系統模型,出發點是現場人員經驗或專家知識,對于動態特性變化顯著的非線性和滯后,時變系統尤其適用,主要包括模糊化、建立規則庫、進行模糊推理、解模糊4部分[16]。
對b及Kp進行調解時通過制定合適的模糊控制規則,根據檢測到的預測溫度誤差e及變化率ec,先模糊化,再通過模糊推理以及解模糊化計算出不同的調節量ΔKp、Δb,然后在線修正加權PID的參數,其計算公式如下:
(11)
為保證控制器的適用性,將模糊調節的輸入e和ec的基本論域范圍設定為[-30,30],根據手動調節經驗將Kp的基本論域范圍設定為[0,8],b的基本論域范圍設定為[-0.5,0.5],設定e、ec、Kp、b的量化論域都為[-3,3],由基本論域和量化論域可確定量化因子和比例因子。輸入、輸出模糊集合為{NB,NM,NS,ZO,PS,PM,PB},分別代表負大、負中、負小、零、正小、正中、正大。為保證覆蓋程度和靈敏程度,各模糊子集都采用三角形隸屬度函數[17]。
依據專家經驗和現場實際調試經驗,建立模糊控制規則如表2所示。最終依據建立的規則表進行模糊推理,并運用中心法對模糊結果進行解模糊化,最終得到適用的模糊查詢表供離線查詢使用。
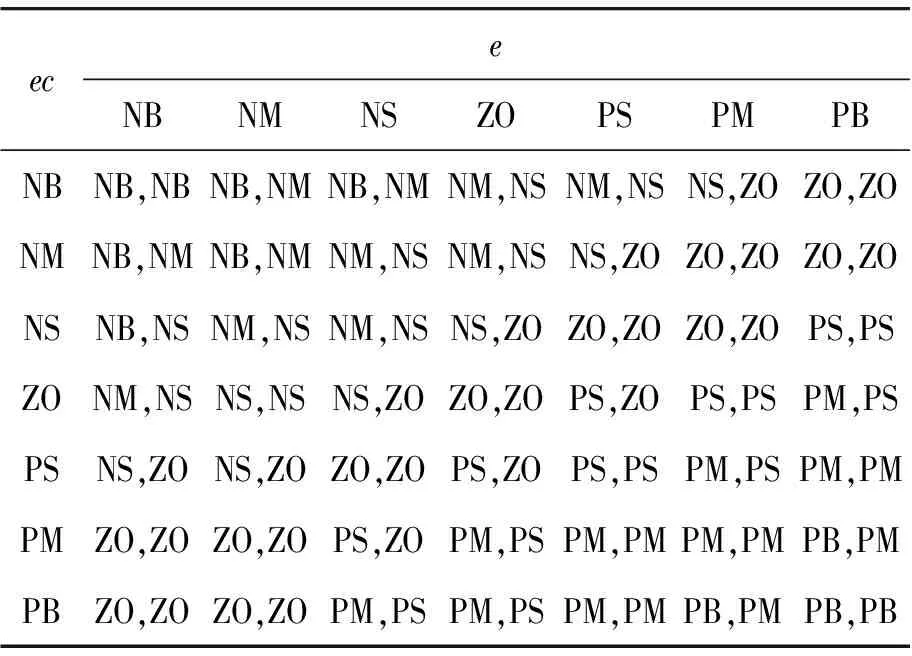
表2 Kp、b的模糊控制規則
2 溫度控制系統的實現及實測結果
2.1 溫度控制系統的設計及實現
反應釜溫度控制系統基于PLC和WinCC設計,包括上位機和下位機兩部分。下位機基于PLC、周波控制器、固態繼電器、傳感器構建控制系統,上位機利用WinCC組態功能構建監控系統,其結構見圖4。
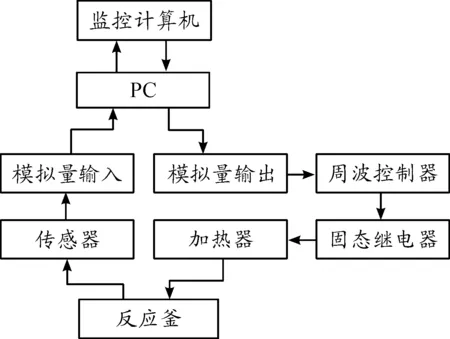
圖4 溫度控制系統結構
通過上位機監控反應釜的狀態和一些參數信息,并把控制指令、溫度曲線傳給下位機,同時灰色預測模型的編程與計算也由上位機完成。下位機接收上位機數據根據控制算法實施控制作用,通過傳感器采集溫度信息并通過周波控制器控制固態繼電器以達到控制反應釜加熱器電壓的目的[18]。
2.2 溫度控制實測結果
以反應釜為對象,以150 ℃和230 ℃工藝要求進行試驗,每隔5 s通過監控計算機采集1個溫度數據,將采集的溫度數據用Matlab繪制出來。圖5為傳統PID方式下的溫度趨勢,圖6為基于灰色預測與模糊PID控制方式(稱為新型控制方式)下的溫度趨勢。2種控制方式下的性能對比分析如表3所示。
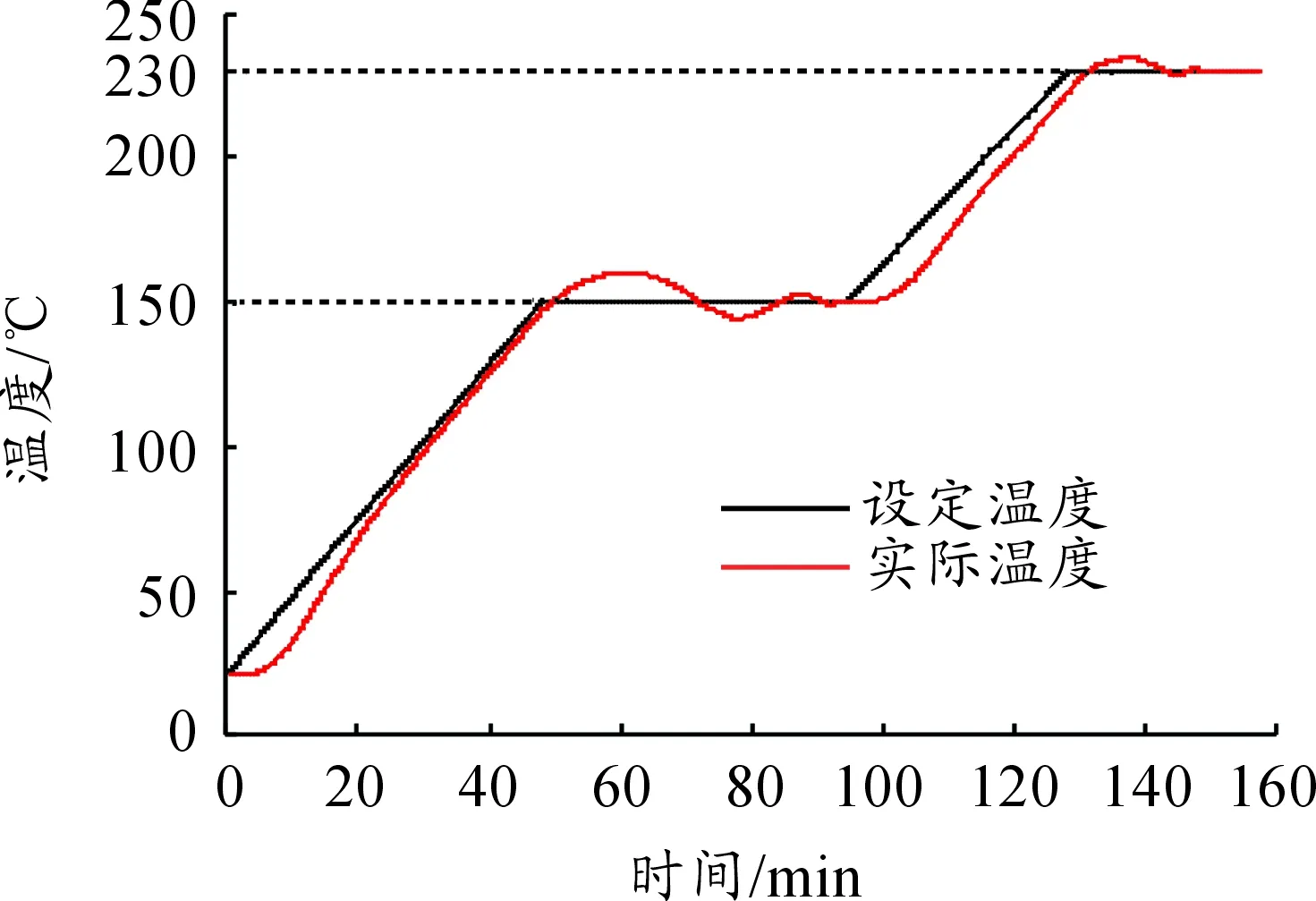
圖5 傳統PID控制方式下的溫度曲線
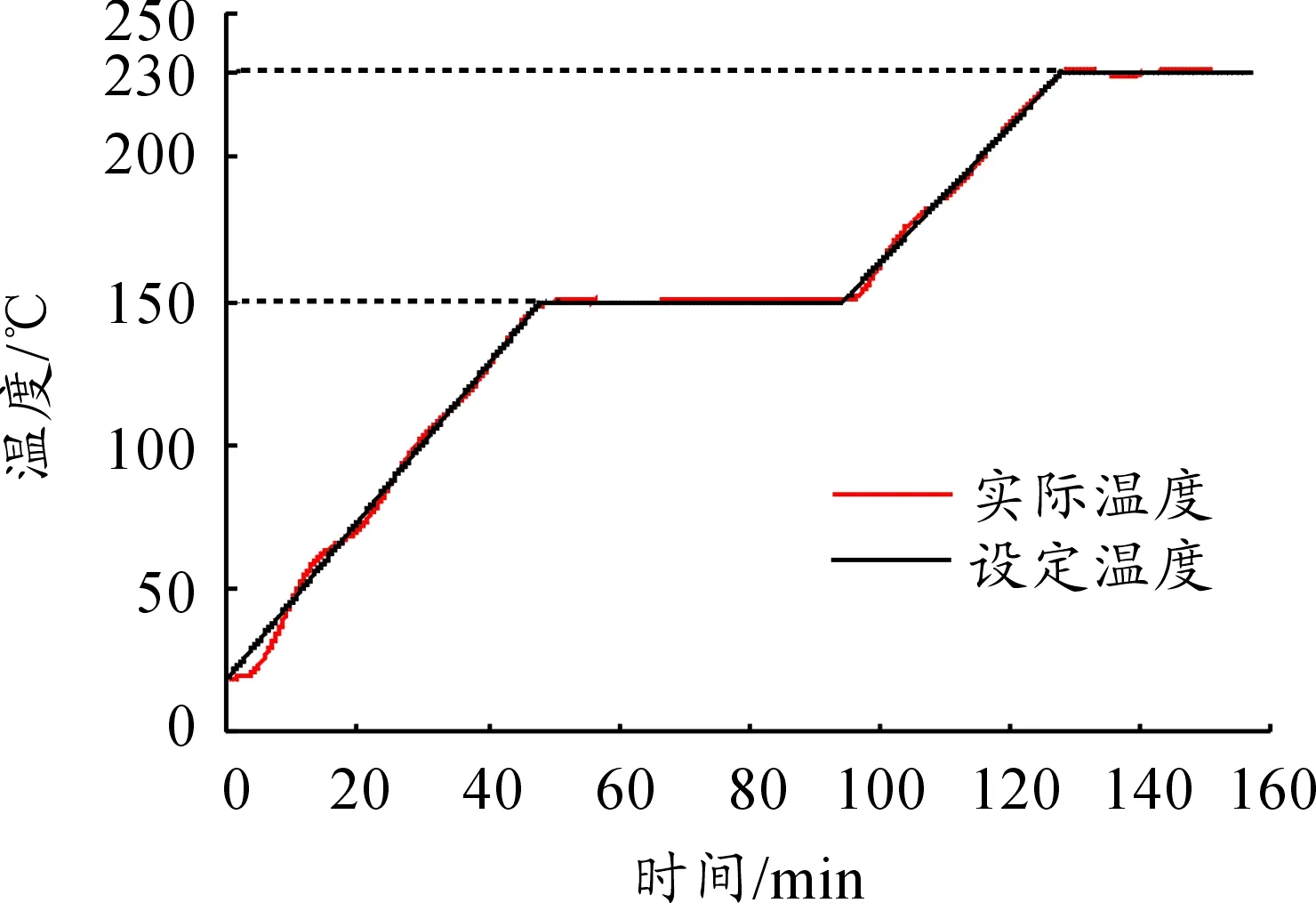
圖6 模糊加權PID控制方式下的溫度曲線
由圖5和圖6以及表3的分析可以看出:基于灰色預測與模糊加權PID的控制方式與傳統PID控制方式相比有更快的響應速度、更好的跟隨性、較小的超調量和較好的穩定性,控制效果有了明顯的改善。
表3 2種控制方式下的性能對比分析
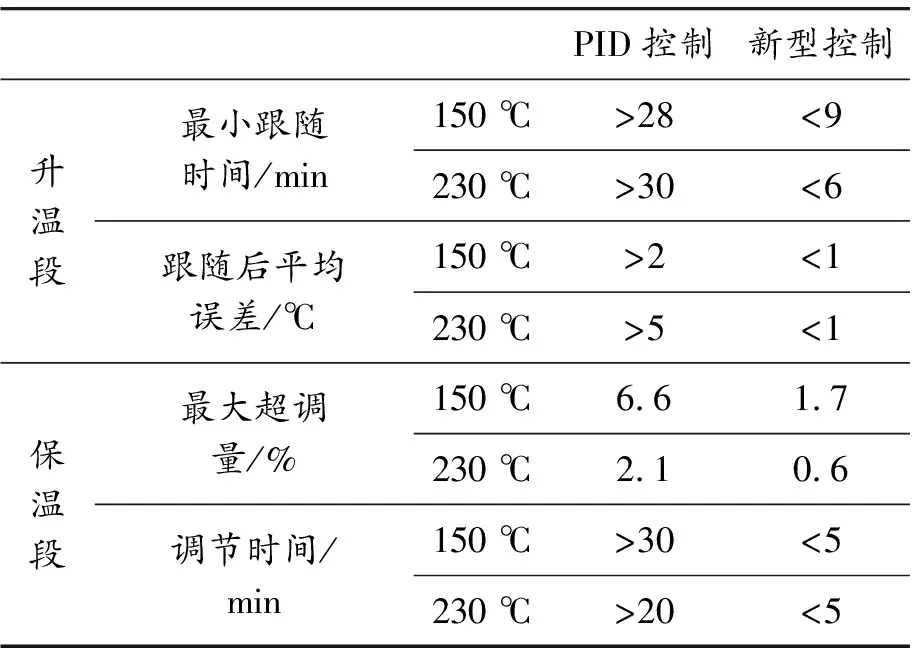
PID控制新型控制升 溫 段最小跟隨時間/min跟隨后平均誤差/℃150 ℃>28<9230 ℃>30<6150 ℃>2<1230 ℃>5<1保 溫 段最大超調量/%調節時間/min150 ℃6.61.7230 ℃2.10.6150 ℃>30<5230 ℃>20<5
3 結束語
針對反應釜的滯后性、非線性、弱跟隨性,以及原有控制方法的弊端,引入了基于灰色預測與模糊加權PID的控制器對反應釜溫度進行控制。現場實踐表明:該控制方法的動態特性和靜態性能都優于傳統控制方式,具有較好的跟隨性、適應性、穩定性和控制精度。該研究對于改善工業中反應釜溫度控制系統有一定的借鑒意義。但是該控制方式也有一定的局限性,僅適用于滯后非線性系統,難以滿足精度要求特殊高的系統,而且其適應性雖然得到了改善,但外在環境變化大時還會對控制效果產生較為明顯的影響。后續研究期望能使用控制領域前沿算法如神經網絡、預測控制等來繼續改善控制精度和適應性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19