盾構(gòu)機掘進煤礦巷道超前探測系統(tǒng)
2019-03-20 06:50:36趙栓峰丁志兵李凱凱魏明樂王文波
煤礦安全 2019年2期
趙栓峰,丁志兵,李凱凱,魏明樂,王文波
(西安科技大學(xué) 機械工程學(xué)院,陜西 西安 710054)
煤礦開采易發(fā)生事故,因此煤炭行業(yè)也被稱為高危險行業(yè)[1]。巷道掘進是煤礦開采過程中必不可少的環(huán)節(jié),巷道的掘進技術(shù)和裝備水平直接影響煤礦的開采效率[2]。盾構(gòu)機是一種專門用于隧道開采的大型設(shè)備,與傳統(tǒng)的工程機械相比,大大提高了掘進效率,減輕了工人的勞動強度[3],因此,在煤炭行業(yè)中可以引進盾構(gòu)機進行煤礦巷道的掘進[4]。2015年12月,我國第一座盾構(gòu)機施工的煤礦斜井——神華神東補連塔礦2號副井順利貫通,標志著我國礦用斜井設(shè)計施工與裝備技術(shù)達到世界先進水平。盾構(gòu)機掘進速度是傳統(tǒng)施工進度的4~5倍,對促進我國深層煤炭資源開發(fā)具有重大意義[5]。在巷道掘進過程中,很可能會遇到水體、空洞等不良地質(zhì),極易發(fā)生塌方、透水等危險事故,造成不必要的傷亡以及損失。因此,開發(fā)超前探測方法及裝備是保證巷道掘進安全的必由之路。
近年來,許多學(xué)者曾對超前探測技術(shù)進行了研究[6-8]。但國內(nèi)結(jié)合盾構(gòu)機應(yīng)用的超前探測方法比較少,現(xiàn)有的探測方法都是解決煤礦巷道掘進中具體的問題,采用的探測裝備很難滿足施工要求。為實現(xiàn)盾構(gòu)機在掘進煤礦巷道時,對前方地質(zhì)進行實時監(jiān)測。設(shè)計了一種基于三維電阻層析成像方法的盾構(gòu)機超前探測實時監(jiān)測系統(tǒng),系統(tǒng)通過獲得測量區(qū)域內(nèi)部各點處的電阻率分布,利用正演、反演算法,實現(xiàn)對盾構(gòu)機前方異常體進行超前探測。
1 系統(tǒng)總體方案
盾構(gòu)機掘進煤礦巷道超前探測實時監(jiān)測系統(tǒng)以盾構(gòu)機的刀盤作為激勵和測量電極進行數(shù)據(jù)采集,利用電阻層析成像算法對測量的數(shù)據(jù)進行反演分析,發(fā)現(xiàn)盾構(gòu)機施工前方的異常體。電阻層析成像的基本原理:利用不同物質(zhì)的導(dǎo)電性差異,通過測量區(qū)域內(nèi)電阻率的分布,得到測量區(qū)域內(nèi)敏感度的分布,就可以利用層析成像算法實施圖像重建。
盾構(gòu)機超前探測系統(tǒng)圖如圖1。實時監(jiān)測系統(tǒng)包括傳感單元、數(shù)據(jù)采集單元和上位機成像單元。激勵源模塊可提供激勵信號所需的電流,激勵信號通過激勵選通模塊分別輸出到保護電極和激勵電極上,實現(xiàn)保護電極的聚焦作用和激勵電極的激勵作用。位于刀盤上的測量電極測量圍巖的響應(yīng)信號,通過測量選通模塊后進行數(shù)據(jù)采集,以此實現(xiàn)盾構(gòu)機超前探測的高速測量過程并將采集到的信號傳輸?shù)接嬎銠C中,在計算機中進行數(shù)據(jù)分析和處理,通過圖像重建技術(shù)進行探測結(jié)果的顯示。其中,主控模塊是該系統(tǒng)的核心,主要實現(xiàn)整個超前探測過程中的激勵和測量命令控制。
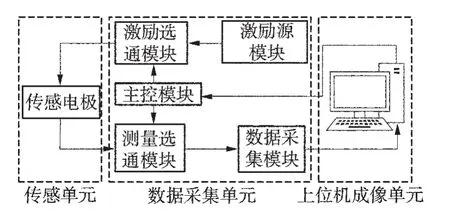
圖1 盾構(gòu)機超前探測系統(tǒng)圖
2 硬件設(shè)計
2.1 傳感電極
傳感電極與測量區(qū)域直接接觸,其作用是施加激勵信號到測量區(qū)域,收集測量區(qū)域的激勵響應(yīng)信號并導(dǎo)入到數(shù)據(jù)采集模塊中。傳感電極的參數(shù)(電極數(shù)量、材料、形狀、布置方式、安裝等)在很大程度上影響測量誤差、單點信息的反映、成像質(zhì)量[9],因此將超前探測傳感電極確定為圓形銅質(zhì)材料的12個電極陣列,其中電極以等間距的方式布置在刀盤上過中心點的直線上。
2.2 主控模塊
主控模塊實現(xiàn)數(shù)據(jù)發(fā)送、選通控制、數(shù)據(jù)采集以及數(shù)據(jù)處理等任務(wù)。該模塊采用TI公司的MSP430f149控制芯片。設(shè)計中通過微控器接口,選擇要施加激勵的電極對,將激勵信號施加到相應(yīng)的激勵電極對上,完成激勵過程;定時/計數(shù)器協(xié)調(diào)激勵、數(shù)據(jù)采集和邏輯開關(guān)切換實現(xiàn)激勵和測量過程中的選通控制功能。
2.3 激勵源模塊
在測量過程中,電極與測量區(qū)接觸,產(chǎn)生的接觸阻抗會給整個測量結(jié)果帶來干擾。電壓源作為激勵信號時,電壓源內(nèi)阻較小,接觸阻抗會對系統(tǒng)測量造成較大影響[10]。電流源作為激勵信號時,電流源輸出內(nèi)阻高,接觸阻抗對系統(tǒng)測量結(jié)果影響較小[11]。所以采用電流源作為激勵源。該模塊采用高精度放大器OP77AZ,能夠獲得0.05~10 mA之間的電流信號,激勵源電路如圖2。
2.4 激勵選通模塊
激勵選通模塊主要控制激勵信號與電極間的導(dǎo)通。根據(jù)測量要求,將激勵源信號輸出到要施加的激勵電極上,每2個電極作為1個激勵電極對,必須分別進行控制。施加的激勵源極易受到電子元器件的干擾,因此需要激勵選通模塊具有較低的導(dǎo)通電阻。CD4067是16選1的高精度CMOS模擬開關(guān),導(dǎo)通電阻約100 Ω,具有較小的漏電流以及5~15 V寬電壓范圍,開關(guān)導(dǎo)通時間為50 ns。施加激勵的回路需要對2個電極進行獨立控制,因此激勵模塊需要2片模擬開關(guān)。
2.5 測量選通模塊
在實際測量中,直接測量電極上的信號,獲得的數(shù)據(jù)會引入測量儀器、環(huán)境干擾等誤差噪聲信號。差分測量2點間的電壓能有效地抑制干擾信號,每次測量須測量2個電極上的信號,每個電極均需要獨立控制。測量選通模塊由2片16路CD4067模擬開關(guān)組成,當激勵選通模塊將激勵源施加到激勵電極上時,可對其余的電極進行獨立測量。
2.6 數(shù)據(jù)采集模塊
在激勵施加后,數(shù)據(jù)采集模塊根據(jù)測量順序?qū)﹄姌O上的信號進行測量。該模塊采用TI公司的ADC芯片ADS1256。此采集卡可采集標準電壓,采用模擬地與數(shù)字地絕對隔離的布置方式,具有很強的抗干擾能力。工作時可利用主控模塊控制其寄存器,實現(xiàn)數(shù)據(jù)傳輸。信號采集電路如圖3。
3 軟件設(shè)計
3.1 激勵模式
超前探測系統(tǒng)中不同的激勵模式會間接影響層析成像的圖像質(zhì)量。相鄰激勵模式相對于相對、單點等激勵模式具有實現(xiàn)過程簡單并且獲取信息量豐富的優(yōu)點。相鄰激勵模式是將激勵電流通入相鄰的電極,測量其余相鄰電極之間的電壓差。采用12電極相鄰激勵,完成相鄰測量模式共有12種激勵方式。測量區(qū)域電阻率分布不均勻時,108個測量值都為有效值。盾構(gòu)機進行盾構(gòu)時,掘進工作面所含有的地質(zhì)信息比較復(fù)雜,因此所有的測量值都含有有效信息。相鄰激勵方式的激勵過程如圖4,分別給12個電極編號1,2,…,12。第1次的激勵過程:1號電極接激勵源的負極,2號電極接激勵源的正極;其它激勵過程與之類似。
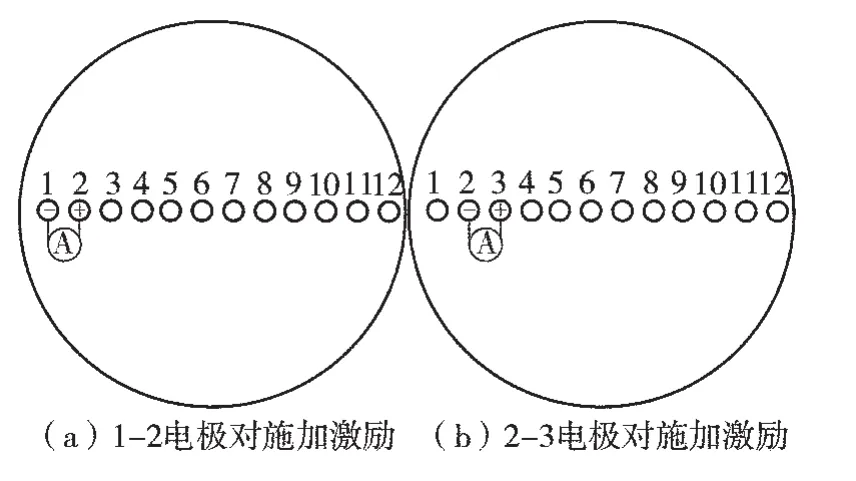
圖4 相鄰激勵模式激勵過程示意圖
3.2 測量模式
測量模式是在相鄰激勵模式下,對相鄰的2個電極施加激勵,對剩余電極進行相鄰測量,每1次激勵下共有9組測量值,完整測量1次共有108組。
3.3 三維電阻層析成像超前探測方法
3.3.1 正演方法
電阻層析成像的正演問題被表示為:

式中:U為測量電極對間的電壓差,V;F為前向算子;ρ為敏感場中電阻率的分布,Ω·m。
結(jié)合泰勒展開法得到電阻層析成像正演問題電壓變化△U與電阻率變化△ρ的關(guān)系:

式中:△U為電壓的變化,V;△ρ為電阻率的變化,Ω·m。
若△ρ特別小,就可將上式簡化為:

若敏感場被分為nC個單元,一種有m個獨立測量數(shù)據(jù),將上式離散并歸一化處理可得:

式中:U、A、G分別為歸一化后的電壓測量值、敏感度矩陣和電阻率分布矢量。這樣就可將非線性問題簡化為線性問題。
在三維聚焦電場中,總電位Uz是正常電位值U0與異常電位值U1之和,即:

3.3.2 反演方法
三維電阻層析成像反演問題是在已知測量區(qū)域邊界條件,求解場域內(nèi)電導(dǎo)率分布的問題。盾構(gòu)機三維層析成像反問題的求解可轉(zhuǎn)換為線性問題并結(jié)合光滑約束條件下的最小二乘方法進行求解。
利用泰勒級數(shù)展開法可將非線性問題轉(zhuǎn)換成線性處理:

式中:△d為實際測量數(shù)據(jù)與正演計算數(shù)據(jù)的差向量;△p為模型參數(shù)的增量向量;A為P×N階敏感度矩陣。由于存在截斷誤差,需要不斷對上式迭代求解才能獲得最優(yōu)解。反演目標方程為:

式中:φ為反演目標函數(shù)。
進行三維層析成像反演求解時,可利用約束進行解決。第i個網(wǎng)格的約束Ri為:

式中:Ri為第i個網(wǎng)格的約束;△pi為第i個網(wǎng)絡(luò)模型參數(shù)修正量,分別為第i個網(wǎng)格的6個面的電阻率修正參數(shù),用矩陣表示整個模型的光滑約束R為:

式中:C光滑參數(shù)矩陣。
引入光滑約束后的目標方程如下:

式中:λ為拉格朗日常數(shù)。
反演方程為:

對式(11)進行迭代可得模型參數(shù)的變化值,再求解下次計算的參數(shù)如下式:

在Matlab中編寫盾構(gòu)機超前探測三維層析成像反演程序,主要實現(xiàn)建模、正演、反演、后處理等和功能。若反演誤差的理論數(shù)據(jù)與實際測量數(shù)據(jù)間的均方差s<反演的允許值η時,模型反演參數(shù)輸出就是最終的反演結(jié)果。反演程序流程如圖5。
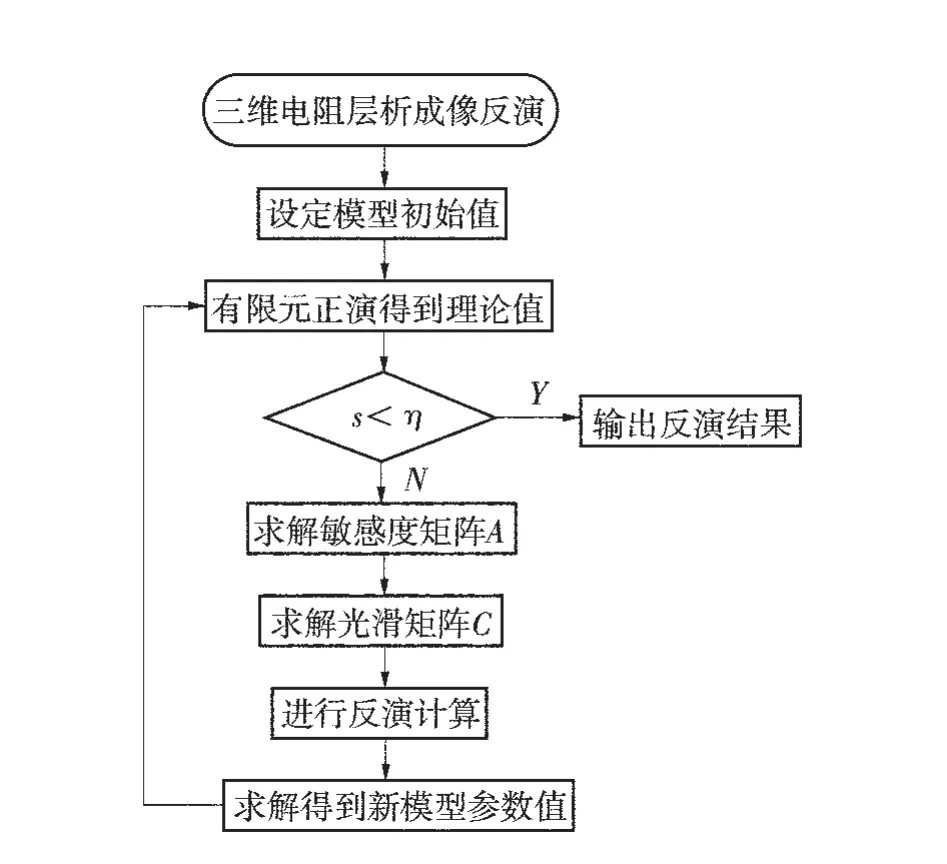
圖5 三維電阻層析反演流程
3.4 超前探測成像演示軟件
盾構(gòu)機超前探測演示軟件是通過對盾構(gòu)機前方地質(zhì)的電阻率數(shù)據(jù)進行分析,進而達到預(yù)測前方地質(zhì)信息的一種工具。工作人員可根據(jù)軟件預(yù)測的結(jié)果,清楚地了解前方地質(zhì)情況,更加有利于安全高效工作。軟件具有的功能包括:①數(shù)據(jù)輸入:直接輸入盾構(gòu)機直徑、異常體到掌子面距離、異常體電阻率、激勵電流、電極1、電極2、電極3等各項數(shù)據(jù);②構(gòu)建圖形:針對上述各種數(shù)據(jù)進行圖形構(gòu)建;③網(wǎng)格劃分:對構(gòu)建的圖形進行精細網(wǎng)格劃分;④問題求解:以有限元法為基礎(chǔ),通過求解偏微分方程得到近似解,從而對掌子面前方地質(zhì)信息進行模擬仿真,得到電勢分布圖、電流流線、敏感度、測點電壓、反演結(jié)果和電導(dǎo)率分布圖。
4 結(jié)語
設(shè)計了一種盾構(gòu)機掘進煤礦巷道超前探測實時監(jiān)測系統(tǒng)。在盾構(gòu)機前端刀盤上安裝激勵和測量電極,通過超前探測系統(tǒng)中的硬件進行數(shù)據(jù)采集,利用三維電阻層析成像方法對測量的數(shù)據(jù)進行反演分析,可將盾構(gòu)機施工前方的異常體實時展示在軟件界面上。實現(xiàn)了盾構(gòu)機掘進過程中復(fù)雜地質(zhì)情況的實時監(jiān)測和遠程畫面實時顯示。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
