光伏電站運維機器人的結構設計與控制功能優化
2019-03-23 02:27:56段春艷馮澤君連佳生賴華景辛少權
通信電源技術 2019年2期
關鍵詞:檢測
段春艷,馮澤君,連佳生,賴華景,辛少權,李 穎
(佛山職業技術學院 電子信息學院 新能源工程系,廣東 佛山 528131)
0 引 言
根據國際能源署和國家能源局的統計數據,中國已連續5年成為全球新增裝機量第一的國家。隨著光伏電站安裝量的大幅增加,光伏電站運維問題凸顯。
受環境因素影響,光伏電站長期在戶外工作,組件表面易出現積灰,影響接收到的太陽輻射量,且組件易受樹葉、鳥糞等的遮擋而產生局部熱斑效應。熱斑位置需專業的檢測儀檢測,運維困難。目前,光伏電站多為人工運維,清掃效率低,耗水量較大,尤其是西部地區,大型光伏電站較多,長期頻繁清洗和用水不便導致運維成本較高。
智能化運維提上日程。機器人是應用研究的熱點,如采用光伏電源供電的機器人[1]、面向綠色建筑光伏裝置的清潔機器人[2]、全液壓驅動光伏板清掃機器人仿真[3]、日本Mirnikikai公司開發的機器人及以色列的太陽能電池板清理系統的EcoppiaE4機器人[4]等。國內市場智能運維產品的智能化清潔機器人只能達到普通的清潔效果,且成本較高,沒有得到大面積的推廣應用。目前,市場上的清掃機器人未熱斑檢測功能,常用無人機搭載紅外熱攝像頭進行熱斑拍攝,或者人工手持紅外熱成像儀進行熱斑檢測。這均需專業人員現場勘測,不能遠程監控,不適合大面積光伏電站的運維。
本文設計制作了一款具有自動清掃、自動熱斑檢測及安全巡檢功能的光伏電站運維機器人系統,并優化設計了其機械結構部件和功能實現模塊。
1 光伏電站運維機器人系統的機械結構設計
本運維機器人的機械結構部分主要由清掃運行模塊和紅外熱成像、實景檢測裝置結構組成。
1.1 清掃運行模塊結構設計
清掃運行模塊由行走裝置和清掃裝置組成。行走裝置控制機器人沿著光伏組件向前行走,清掃裝置則在行走中清掃組件灰塵。
行走裝置由57HS22步進電機、驅動輪、從動輪、驅動輪軸承、驅動輪軸承座、同步輪組、傳動帶及接近開關組成,如圖1所示。行走裝置的動力由57HS22兩相步進電機提供。步進電機的動力輸出軸與MXL20同步皮帶輪連接,動力從MXL20同步皮帶輪通過皮帶傳送到MXL48同步皮帶輪。MXL48同步皮帶輪和主動輪固定在8 mm的不銹鋼軸上,從而將動力傳送到驅動輪上。8 mm不銹鋼軸的兩端固定在628/8軸承上,軸承通過軸承座固定在2020鋁型材上,采用M5螺栓連接。從動輪通過8M螺栓與2020鋁型材連接。
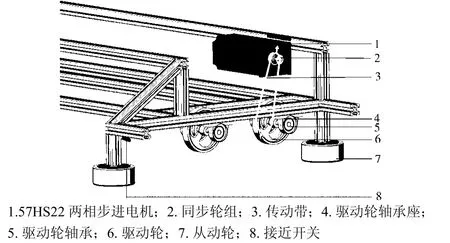
圖1 機器人行走裝置結構示意圖
西門子S7-200 224XP PLC可編程控制器通過Q0.0輸出口對雷賽DM542步進電機驅動器進行命令控制。DM542步進電機驅動器輸出命令到雷賽57HS22兩相步進電機,再通過同步輪組、傳動帶的傳動驅動從動輪開始運動,而從動輪通過支架安裝于機器人側面,卡住光伏組件邊框兩側,防止機器人運動時脫落。當接近開關碰到停機位擋板時,將信息反饋至西門子S7-200 224XP PLC可編程控制器。西門子S7-200 224XP PLC可編程控制器輸出停止命令或反轉命令至雷賽DM542步進電機驅動器,從而實現正反轉。
清掃裝置由螺旋毛刷及其配套部件組成,主要包括57HS30步進電機、螺旋毛刷、毛刷軸承座、減速輪組及傳送帶,如圖2所示。毛刷全長1 799.8 mm,直徑90 mm,毛長25 mm,采用尼龍材料,既可達到清潔效果又不易損失組件。毛刷安裝在運維機器人的前端,通過6002軸承座固定在鋁型材上。由雷賽57HS30兩相步進電機提供動力,動力經過步進電機上的MXL48同步輪帶動皮帶,而皮帶帶動毛刷上的MXL20同步輪,從而驅動毛刷進行旋轉清潔。本結構中,毛刷的同步輪與毛刷電機的同步輪比值是2.4∶1,以達到減速的效果。
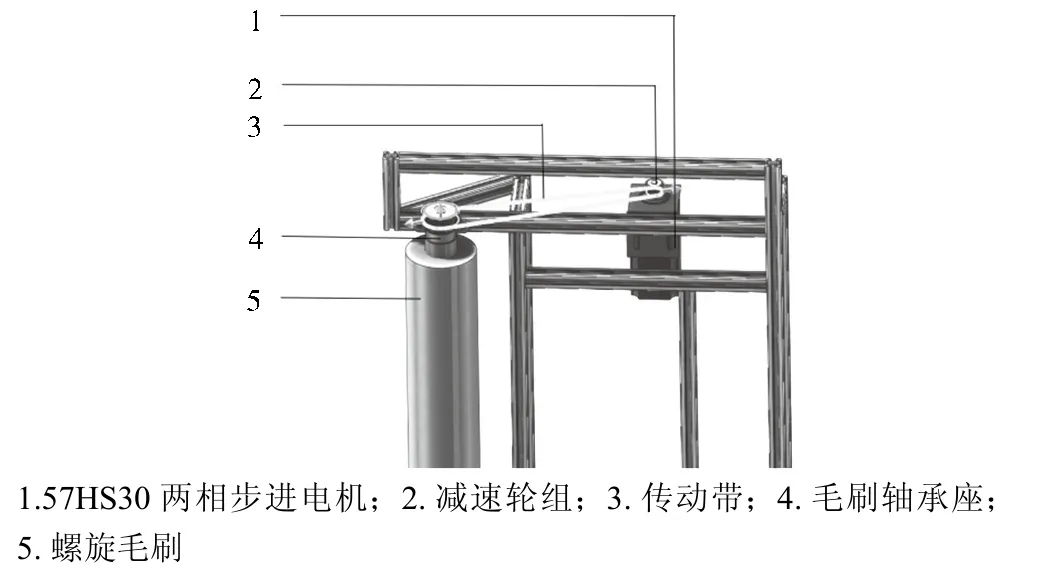
圖2 機器人清掃裝置結構示意圖
西門子S7-200 224XP PLC可編程控制器通過Q0.0輸出口對雷賽DM542步進電機驅動器進行脈沖輸出控制,通過將兩個驅動器的脈沖輸入端口并聯實現同步運動,然后DM542步進電機驅動器再輸出命令至雷賽57HS22兩相步進電機。減速輪組和傳送帶的傳動可驅動螺旋毛刷滾動。毛刷的清掃滾動方向與機器人驅動輪運動方向相反,使得驅動螺旋清掃出來的灰塵和垃圾都堆積在機器人運動方向的前方。當機器人清掃至每一排尾端時,灰塵和垃圾將從組件陣列尾端掉落。
考慮到機器人整體結構的穩定性,對驅動輪的軸承座、毛刷的軸承座、關鍵部位的螺栓進行選型計算,主要針對零件的工況(震動、沖擊、高溫、低溫、高速、低速)進行選型計算。同時,考慮零件尺寸的限制,提高機器人的使用壽命。
1.2 紅外熱成像、實景監測裝置結構設計
本運維機器人將FLIR Lepton V1.3 Thermal Camera與RMONCAM G600實景攝像頭結合組成紅外熱成像、實景監測裝置,如圖3所示,通過鋁型材擺桿、減速箱、直流電機、直流電機驅動器及拍攝減震平臺共同配合完成工作。直流電機經過減速箱進行扭矩放大,驅動擺桿運動,擺桿運動范圍在180°以內,通過角度傳感器進行信息反饋。紅外熱成像、實景檢測裝置在未工作時回收到機器人本體,工作時通過擺動回到適合拍攝的角度。紅外熱成像用于監測、分析光伏組件的熱斑效應。
通過拍攝減震平臺穩定FLIR Lepton V1.3 Thermal Camera與RMONCAM G600實景攝像頭,減小震蕩幅度和圖像處理算法的難度,使圖像處理更精準,熱斑檢測更高效。
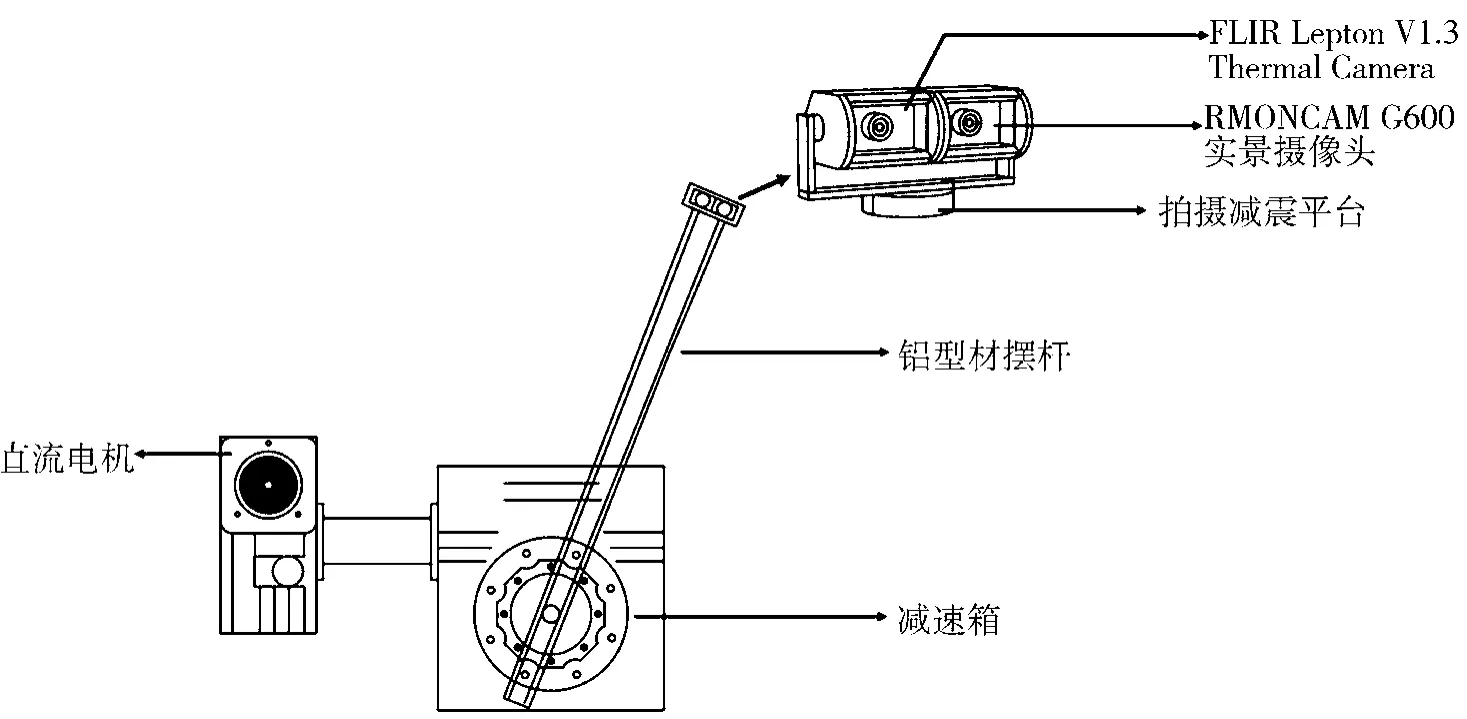
圖3 紅外熱成像、實景檢測裝置結構示意圖
2 光伏電站運維機器人系統控制功能模塊設計
2.1 清掃功能模塊設計
目前,光伏組件前蓋玻璃的自清潔能力較弱。因此,及時清掃光伏組件能有效提高光伏電站的發電量。在區域后臺管理中心設定清掃時間(系統默認每天6:00為數據更新時間,為不影響光伏電站發電效率,清掃時間一般設定在18:00-次日6:00),區域后臺管理中心在設定的時間發出清掃指令到運維機器人。運維機器人搭載的Fire fl y-RK3399開發板根據當日數據,判斷是否啟動過雨天清潔,若沒有則開始執行清掃任務,否則結束任務執行,如圖4所示。日常工作中,若艾飛星創電容式雨量傳感器檢測到當前雨量大于10 mm,Fire fl y-RK3399開發板將執行雨天清潔任務,否則結束任務執行。
2.2 熱斑檢測與實景畫面采集功能模塊設計
光伏組件的熱斑檢測需要使用的輻射源是穩態太陽模擬器或者自然光源,且其輻射強度不低于700 W/m2。本運維機器人通過太陽能輻射強度傳感器采集當前環境自然光源的輻射強度。為采集到更清晰的熱斑圖像,在Fire fl y-RK3399開發板的LINUX系統中設置太陽能輻射強度閾值為900 W/m2。當前環境自然光源的輻射強度超過閾值,Fire fl y-RK3399開發板會向區域后臺管理中心發送“建議開啟熱斑檢測信號”的信息,然后由后臺運維管理人員確定是否開啟熱斑檢測。
當運維管理人員開啟熱斑檢測命令時,Fire fl y-RK3399開發板接收到命令,驅動行走裝置工作,同時打開FLIR Lepton V1.3 Thermal Camera紅外熱成像攝像頭和RMONCAM G600實景攝像頭。FLIR Lepton V1.3 Thermal Camera采集紅外熱成像照片,RMONCAM G600實景攝像頭采集實景圖像,并將圖像傳輸到機載Fire fl y-RK3399,如圖5所示。后臺通過提取相應圖像的特征點,識別組件是否存在熱斑現象。當組件存在熱斑時,RMONCAM G600實景攝像頭拍攝組件實景畫面。Fire fl y-RK3399開發板將熱斑圖像與實景畫面傳輸至后臺管理中心。后臺運維管理人員根據圖像判斷組件的熱斑程度,通過實景畫面判斷產生熱斑效應的原因,并確定問題組件的位置。

圖4 運維機器人執行清掃任務流程圖
2.3 運維機器人安全巡檢功能實現
大型地面光伏電站一般建設在人煙稀少、環境惡劣的地區,運維管理困難。可視化監控系統的搭建,對于偏遠地區的光伏電站十分必要。本文在運維機器人上搭載了RMONCAM G600 實景攝像頭。當光伏電站需要安全巡檢時,后臺管理人員可派出運維機器人啟動可視化監控功能,通過調控RMONCAM G600實景攝像頭觀看光伏電站實景畫面,如圖6所示。

圖5 組件熱斑識別流程圖

圖6 安全巡檢管理后臺顯示實景畫面
3 光伏電站運維機器人系統應用
在佛山職業技術學院實訓b樓頂搭載一套單晶PERC高效太陽能組件發電量對比測試平臺,如圖7所示。選擇兩塊型號、批次相同的全新PERC組件,比較利用智能運維機器人日清掃一次與不清掃情況下兩塊組件的發電量差異。
先采集兩塊PERC組件在相同環境下都不清洗的發電數據,以保證本試驗的真實性。調整運維機器人任務程序,使其每日清掃3號組件,而2號組件不清掃用作對比。采集18天的發電量數據,通過分析可更直觀地看出光伏組件日清掃一次提升的發電量。表1給出光伏組件是否清掃對發電量數據影響的對比數據,可知清掃后發電量提升明顯。圖8為工作中的運維機器人狀態和運動中采集的熱斑檢測照片。需要說明的是,提升率是指對比提升的發電量與未清掃組件發電量的比值。

圖7 光伏組件發電量測試對比平臺
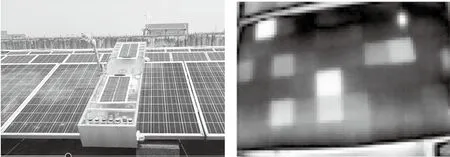
圖8 工作中的運維機器人及熱斑采集圖片示例
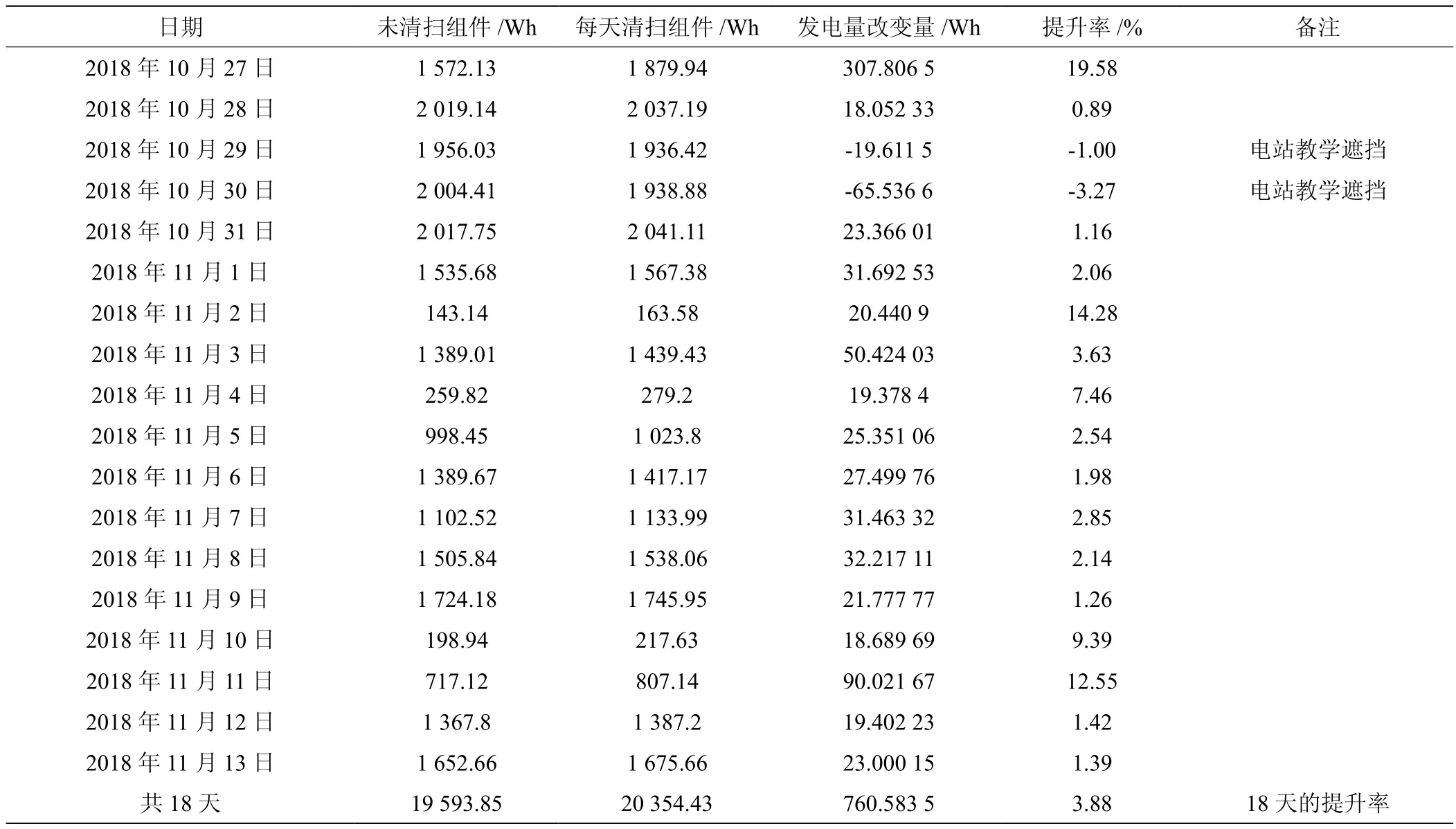
表1 光伏組件是否清掃對發電量數據影響的對比數據
4 結 論
本文設計了一款具有自動清掃、自動熱斑檢測及安全巡檢功能的光伏電站運維機器人系統,并優化設計了主要的機械結構部件和功能實現模塊,搭建了戶外運行檢測平臺。通過比較清掃與不清掃組件的發電量數據發現,發電量提升明顯,且運維機器人在運行中能自動檢測和收集光伏組件紅外熱成像照片來判斷和分析熱斑效應,可為智能化光伏電站運維提供支持。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
