農林智能無人機通信方向研究
2019-03-24 10:11:44董作峰趙澤宇
時代農機 2019年11期
董作峰,趙澤宇,王 楠,劉 唱
(山西工程技術學院,山西 陽泉045000)
隨著科技的快速發展,由無線電操控或自身程序控制的無人駕駛飛行器——無人機的出現,在世界上引起了巨大反響。當前,為了減少我國在農林監控方面人力資源的浪費,也為了更加詳細的了解農林資源,無人機的出現可有效緩解這方面的壓力。并且對其通信方面的研究對幫助了解與監控農林資源方面有極其重要的作用。
1 研究背景
1.1 研究現狀
早在以前,國外就在農業方面運用有人駕駛飛機進行農藥噴灑工作,節省了大量人力,并且可以使農藥有規律且均勻分布在農田里。而我國各個地區的農田分布較為零散,使用有人駕駛飛機較為浪費,無人機比較適合我國國情。目前,我國無人機事業已經開始蓬勃發展,逐步應用于農林方面,但由于無人機的應用范圍較為廣泛、技術有差異,還沒有規范的行為規章制度。為此,國家標準化管理委員會聯合國家八部委制定了《無人機系統標準體系建設指南》。這大力推動了無人機事業應用于各個領域。
1.2 農林智能無人機通信技術的發展趨勢
目前,我國森林面積達到1.75億公頃,耕地面積1.28億公頃。面對如此之大的土地面積,并且會出現各種用于不同情況的農林智能無人機,普通的無人機通信技術無法滿足需求。在通信技術方面,目前有著諸多問題,例如節點傳輸容量有限、傳輸信號弱、信息之間的傳輸效率低等諸多方面。這些現實問題的出現,為農林智能無人機通信點明了發展方向。
2 無人機通信研究分析
2.1 傳統Wi-Fi通信
最傳統的通信方式Wi-Fi通信是現今使用最多的無人機通信方式,這種方式操作簡單,使用方便,普遍運用于廣大無人機上。但存在技術落后、方式陳舊,無人機的安全得不到保障,范圍也相對局限,無法遠距離傳輸等缺點。一但無人機飛離信號區就無法接收到Wi-Fi信號致使無人機無法進行信號傳輸,并且伴隨網絡的延遲通信也會受到一定的影響。
2.2 Lightbridge圖傳
Lightbridge圖傳是由我國大疆無人機公司自主研發獨創的一款通信方式。Lightbridge圖傳不受傳統通信機制的影響,所以在圖像傳輸信號發生嚴重延遲的情況下也不用重新發送數據,仍然能將即時的信號發送到監視器上,即便是有延遲也可以忽略不計,只有150ms左右。當到達該技術的極限距離時,操作員就會收到來自遙控器的警告信號,當信號丟失時,不會給操作員發送過時的信息,不會讓操作員誤以為無人機還在正常飛行,這點是Wi—Fi傳輸比不上的優勢。但也有一定的缺點,它無法做到超遠距離的信號傳輸,并且容易受到電磁的干擾致使無人機通信受到影響。
2.3 基于衛星無人機通信
衛星無人機通信是一種應用于軍用無人機上的通信方式。它是通過無人機上的信號發射設備將信號發射到衛星上,再由衛星將信號傳輸回地面,這種信號的傳輸不會受到各種干擾,并且傳輸速度快、畫面清晰、對距離也沒有要求。但這種信號發射裝置過于復雜無法安裝在小型無人機上,致使小型無人機無法通過衛星通信。
3 無人機通信解決方案
通過建立小型信號基站并將其安裝在無人機上使其永遠都存在于信號覆蓋的區域并保持信號良好通信順暢,增加抗干擾性防止電磁的干擾。
信號基站相對應的無人機(圖1),頂端的信號接收器接收來至衛星的信號,上層部分為無人機的控制系統與信號接收系統,下層部分方至信號基站作為無人機的信號源進行信號傳輸。
信號基站(圖2)是一種便捷的無人機信號接收裝置,由于其體積微小的特點,方便無人機攜帶與安放,使無人機不再受到無法接收信號的影響,從而使其飛行距離不再受到限制。信號基站為一個整體模塊體積小安裝簡單對無人機沒有增加多余的負擔。

圖1 信號基站相對應的無人機

圖2 信號基站
3.1 衛星信號的接收
北斗衛星導航系統B1頻點調制的載波頻率為1561.098MHz,然而由于多普勒效應的存在,使得最終到達接收機天線的載波頻率發生偏移,所以必須先估計出多普勒頻偏,剝離載波,才能進一步對偽碼相關峰進行檢測。如果己經得到多普勒頻偏,還需要確定出對應衛星信號的偽碼序列及初相位,復制出正確的偽碼,才能檢測到偽碼的相關峰位,完成對衛星信號的捕獲。因此必須通過制定相應的搜索策略來估計出衛星信號的多普勒頻偏與偽碼及其初相位,對于弱信號還要通過相關方式提高捕獲信號的信噪比。常用的捕獲方法有:線性搜索法、并行頻率搜索、并行碼相位搜索和匹配濾波。
接收機通過PVT解算處理獲得位置、速度與時間信息,實現定位、測速與定時的目的。由基帶數字信號處理過程已經得到了各顆衛星的導航電文信息,首先要在這些電文信息的基礎上測算出相應的原始觀測量,包括多普勒頻移、載波相位、載噪比、俯仰角、偽距、衛星位置坐標和運行速度、信號接收時間和發射時間、接收機鐘差和鐘漂等信息,然后利用這些觀測量來進行PVT解算。
3.2 信號發射
邊界路由器是OpenThread網絡的核心組成部分,要求協議執行能力強,運行速度快。OpenThread邊界路由器HOST端選用了Broadcom四核64位ARMA53處理器,1GB運行內存,板載WIFI和藍牙模塊,滿足本文設計要求的同時,性能上留有較多富余量,可進行二次開發功能擴展。OpenThread邊界路由器由樹莓派和CC2538模塊兩部分組成,通過USB連接,硬件結構如圖3所示:
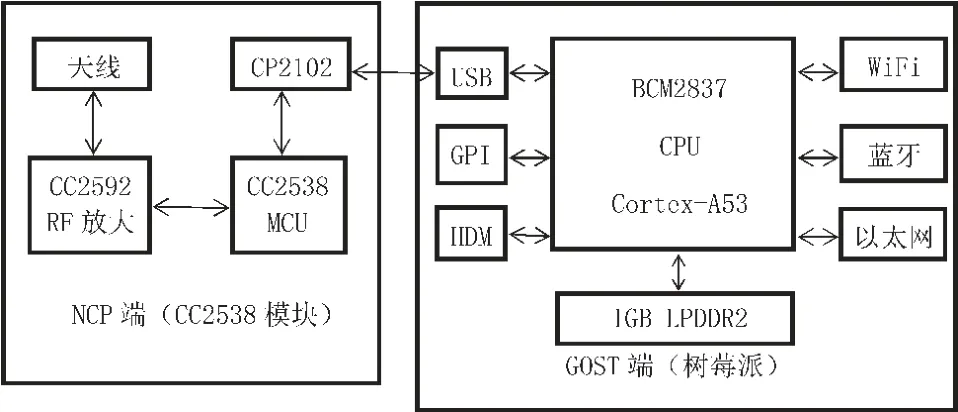
圖3 邊界路由器硬件結構
樹莓派只提供能夠訪問外部IP網絡的以太網和WIFI接口,不支持IEEE802.15.4標準協議,故需要移植有OpenThread協議的CC2538模塊來提供對OpenThread網絡接入的支持。CC2592是2.4GHz無線RF前端收發芯片,可增加輸出功率、提升接收器靈敏度、降低噪聲系數。
為了實現IP網絡和OpenThread網狀網絡互聯,邊界路由器需要同時支持兩種異構網絡。OpenThread邊界路由器采用“HOST+NCP”分離式設計,邊界路由器主程序在HHOST端運行,連接IP網絡,NCP端(CC2538模塊)連接OpenThread網狀網絡。在該設計中,邊界代理通過Wpantund和Spinel與NCP通信,Spine;還提供了NCP的CoAP客戶端與服務器之間的接口。系統軟件結構如圖所示,關鍵模塊功能見表1。此外,邊界路由器的WAN(WIFI,以太網)口支持外部專員(如用戶的手機)認證和連接OpenThread網絡節點,并使用標準UDP套接字與外部專員通信,如圖4所示:

表1 關鍵模塊功能

圖4 結構圖
3 抗干擾設計
抗電磁環境影響技術的作用包括:完整的無人機裝備的敏感性分析;外殼屏蔽效能計算;自由空間環境的實驗裝置設計、評估和規范化;電纜設計和保護轉移阻抗提取;復雜電纜系統的感應電流和電壓預測;電磁干擾(EMI)濾波器、鐵酸鹽或非線性瞬態保護電路的性能。
設計PLC控制網絡信息抗干擾技術時,針對不同頻率的信號選用不同型號的接收器接收信號。網絡信息干擾源十分復雜,僅靠回避措施屏蔽干擾是不夠的,可利用適當軟件編程進行抗干擾處理。通常使用的措施是數字濾波、信息冗余技術或者“看門狗”輔助軟件等。PLC網絡信息技術的軟件抗干擾方式能降低信號的信噪比,本文采用軟件濾波方式實現。首先,進行多次信息采樣并進行聚集歸類,然后儲存在不同的寄存器中,通過模擬干擾計算得到干擾類別和干擾預值,判斷信息的傳輸過程。在一定運行環境的影響下,網絡電子信號的振動頻率過于高或者過于低都會產生相應的躍遷現象,一定程度上會出現網絡信息干擾。PLC網絡信息技術針對這一現象進行優化設計,以電子信息自身的數據與基礎執行命令,對應結果必須保證相應的執行命令被延續,保證多次的有效命令才能完成信息有序傳輸。如果接收信號不穩定,選擇自動停止傳輸甚至會進行自主警報,方便數據修復,很大程度上提高了數據的真實穩定性,避免了信息干擾。
4 結 語
通過分析通信方向得出無人機發展的必要性和重要性,發現了無人機在通信方面的一些問題,并且用技術手段解決了對應問題。通過該技術,可以解決一些農林無人機通信方面的問題。隨著無人機在農林方向的應用拓展,會有更加優秀的通信技術的出現,農林智能無人機會有更廣闊的發展,發揮更大的作用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32