一種測量雷達散射截面參數現場校準方法
2019-03-25 02:36:06丁孝永賈冒華
宇航計測技術 2019年1期
丁孝永 童 瓊 賈冒華
(北京無線電計量測試研究所,北京100039)
1 引 言
雷達散射截面[1]參數反映了雷達目標對照射電磁波的散射能力,其參數測量準確性是評判武器系統隱身性能指標的重要依據。 雷達散射截面參數校準通常采用空心金屬球或龍伯球作為標準體[2],結合雷達方程對雷達散射截面參數進行計算,通過實測值與計算值比對的方式實現。 該傳統方式具有一定的局限性,無法解決連續波雷達散射截面參數的現場校準的問題;采用高精度有源[3]接收、轉發模擬的方法可以很好地解決連續波測量雷達散射截面參數校準的問題。
2 雷達散射截面參數校準原理
校準源在距離連續波測量雷達一定距離處,將接收到的雷達信號經延時、放大并且調制多普勒信息后轉發回雷達;在收發天線增益、放大器增益等參數恒定時,該校準源就相當于一個RCS 參數固定且具有一定速度的標準雷達目標,其等效雷達散射截面參數可以通過溯源到標準體得到,作為連續波測量雷達的標校真值完成校準,如圖1所示。
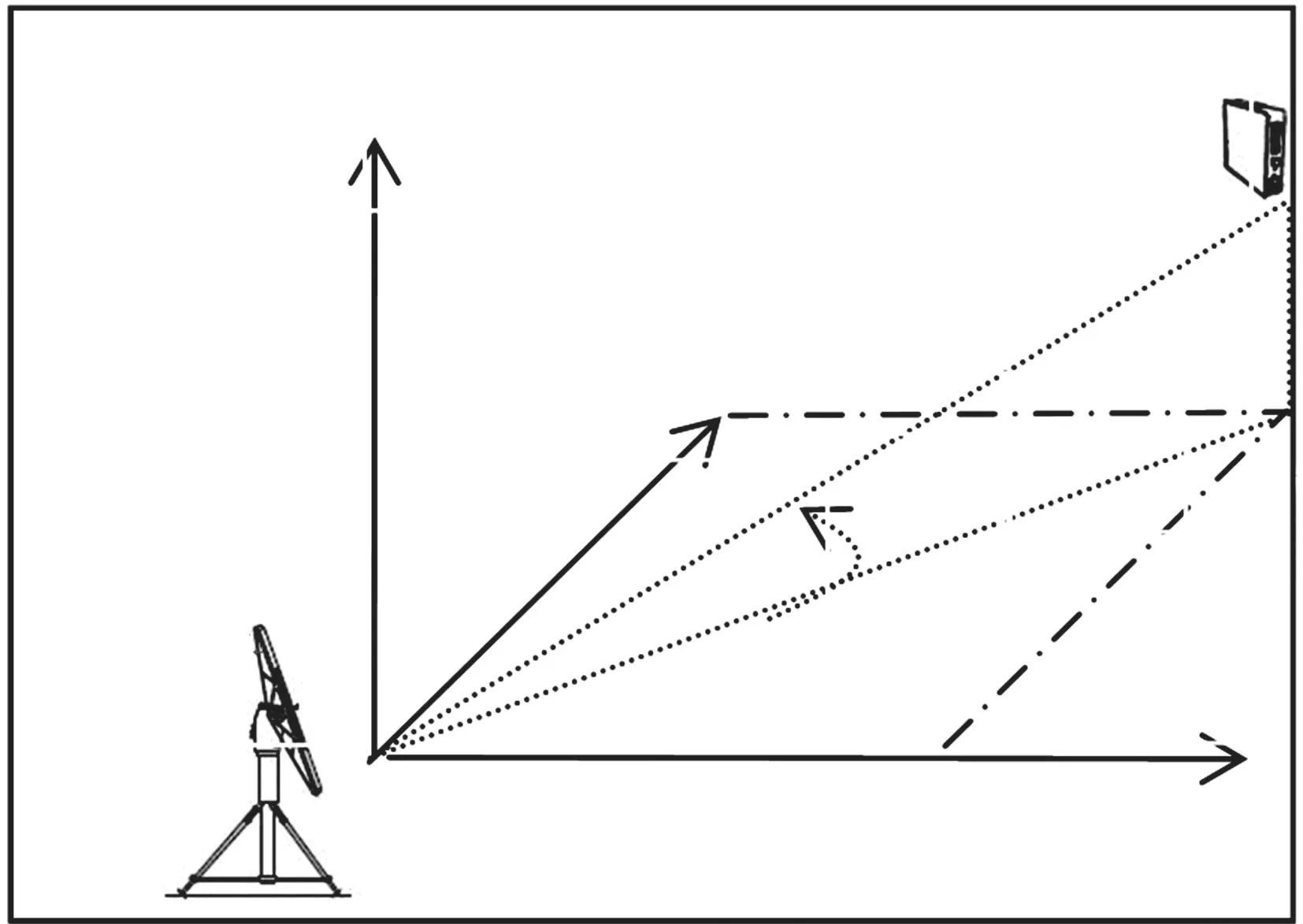
圖1 連續波雷達RCS 參數校準原理框圖Fig.1 CW instrumentation RCS Parameter Calibration diagram
采用收、發天線分置的雷達方程見式(1)
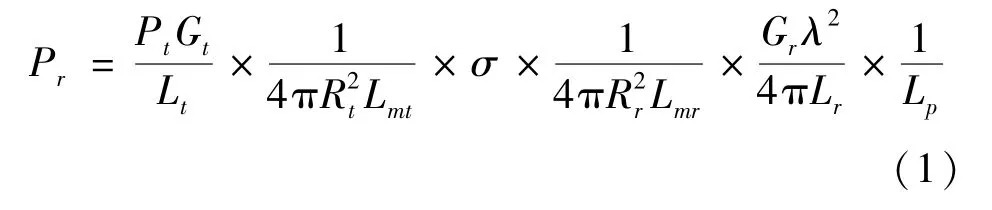
式中: Pr——雷達接收的目 標回波功率, W;Pt——雷達發射功率,W; Gt——發射天線在目標方向上的增益;Gr——接收天線在目標方向上的增益;λ——雷達波長,m; σ——目標的雷達散射截面,m2;Lt——發射饋線支路損耗; Rt——發射天線到目標的距離,m; Rr——接收天線到目標的距離,m;Lmt——發射系統到目標之間的大氣傳輸損耗;Lmr——接收系統到目標之間的大氣傳輸損耗;Lr——接收饋線支路損耗;Lp——極化損耗。
單站雷達方程見式(2)

此時,R =Rt=Rr、Lm=Rmr=Rmt。
雷達散射截面可由式(3)表示

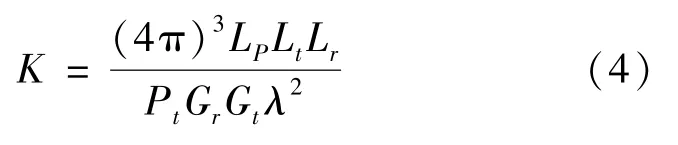
令常數K 為
雷達散射截面可改為式(5)表示

式中:σs——標準體的雷達散射截面,m2; Prs——標準體的回波功率,W; Rs——雷達天線到校準體的距離,m;Lms——雷達到校準體之間的大氣傳輸損耗。
3 高精度RCS 參數校準方案
3.1 校準源定標方法
校準源等效RCS 參數可表示為[4]

式中: σ0——校準源等效RCS 參數,m2; Gt0——校準源發射天線增益; Gr0——校準源接收天線增益;GE0——校準源放大器增益;λ——被校準雷達波長,m;LP0——校準源損耗;Pt0——校準源發射功率,W;Pr0——校準源接收功率,W。
可以看出,校準源的等效RCS 參數值只與接收天線增益、發射天線增益、放大器增益及工作波長等參數有關,當校準源的位置固定且其放大倍數恒定時,其等效雷達散射截面參數就為恒定值,這就是校準源的校準原理。 只要保證校準源的輸入功率和輸出功率的比值保持恒定,即可使得其等效RCS 參數為恒定值,無需對校準源內部所有參數分別定標,只需對其輸入輸出功率進行功率標定即可完成對校準源的溯源。
根據式(5)可知,連續波測量雷達RCS 參數現場校準裝置對于雷達散射截面指標模擬不確定度主要取決于其含天線的系統增益,可以采用由微波暗室、標準矢量網絡分析儀、放大器、收發天線組成的天線校準系統[5]對多點動態增益指標進行精確相對量定標,再用標準體(龍伯球)進行絕對量定標[6]。 量值傳遞過程如圖2所示。
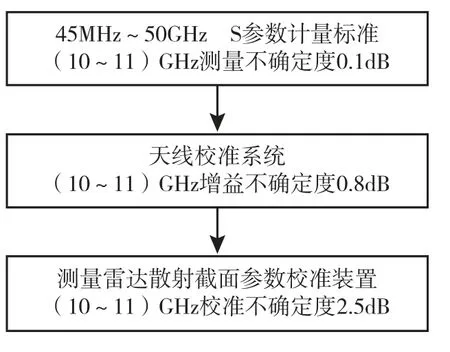
圖2 量值傳遞圖Fig.2 Measure value transfer diagram
3.2 校準源實現方案
校準源主要由收發天線、通道單元、中頻單元、北斗時間同步儀、遠端控制儀等部分組成。 校準源組成框圖如圖3所示。
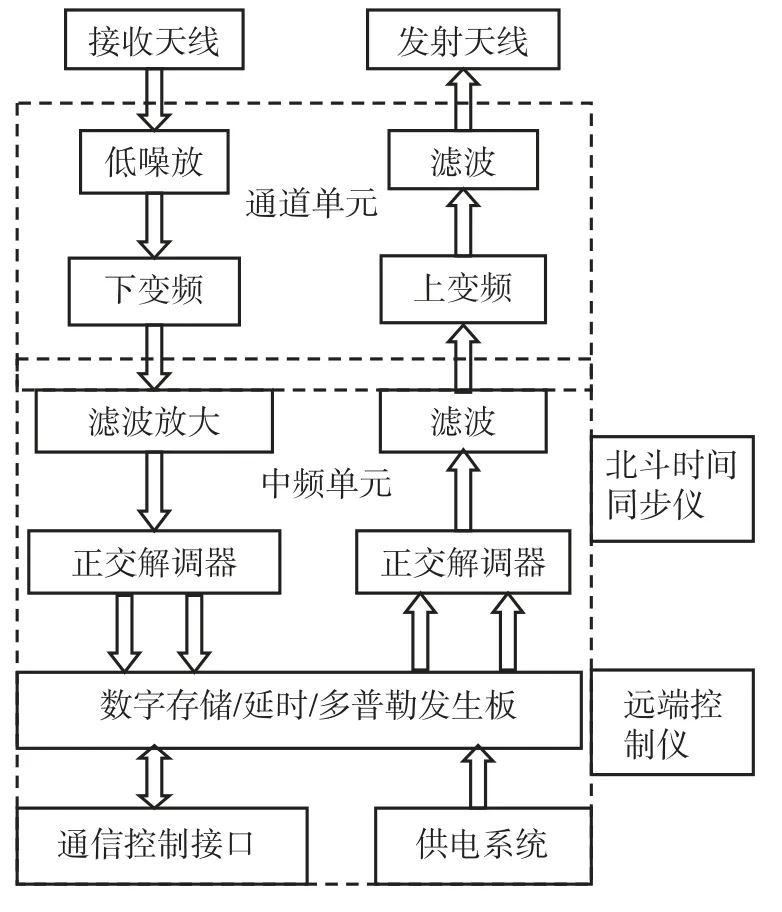
圖3 校準源組成框圖Fig.3 Calibration source consists of block diagram
在校準源中,接收系統將天線接收下來的射頻信號經過放大、濾波、下變頻為中頻信號,為了保證校準源的輸出延時,頻率和功率的精確可控,本系統擬采用數字射頻存儲技術(DRFM)實現對采集到的中頻模擬信號的高速采樣和存儲。 按設置的參考距離進行相應時間的延遲,并結合DDS 技術將中頻基準信號經相應變頻后作為時鐘信號,通過數字方式控制產生一個多普勒頻移信號。 將該信號對DRFM 輸出端的信號進行多普勒調制,即可產生一個包含距離延時和多普勒頻移參數的回波信號。最終由高速數模轉換器轉換為正交基帶模擬信號,后經激勵上變頻到輸出端口由發射天線發回給被校準雷達。 此信號與發射信號完全相參,并且包含距離、速度和幅度信息。
3.3 現場校準定標方法
根據收發分置雷達方程式(1),可以求得雷達的K 值,見式(7)
式中:σs——標準體的雷達散射截面,m2; Prs——標準體的回波功率,W; Rs——雷達天線到校準體的距離,m;Lms——雷達到校準體之間的大氣傳輸損耗。
現場校準主要是對雷達的K 值進行現場量值傳遞以實現修正,使其適應外場現場測量環境。 被校連續波測量雷達的K 值通常是通過理論計算和實驗室校準相結合得到的,由于是在實驗室環境下進行的定標,其測量結果在實驗室環境下比較準確。 由于現場環境比較復雜,受到多路徑效應、大氣衰減等環境因素的影響,其在實驗室環境下得到的K 值在現場環境下應用,就會存在較大誤差。 因此,需要在現場實際測量環境下對連續波測量雷達的K 值進行量值傳遞,以修正因環境不同引起的K值變化。
3.4 現場校準技術方案
現場校準[7]修正雷達K 值因子時,校準源被架設在高塔上(或實際測量環境中),被校雷達和校準源間的距離R 由全站儀精確測量,被校雷達發射雷達信號,校準源對其信號進行接收,并且將接收到的雷達信號經延時、放大及調制多普勒信息后動態模擬雷達目標特性信號真值雷達散射截面參數,轉發回被校雷達,被校雷達實時跟蹤測量,并解算出雷達散射截面參數測量值。
通過對比被校雷達雷達散射截面參數測量值與校準源產生的雷達散射截面參數完成自身校準。校準過程中通過在預定區域架設雷達柵抑制多路徑效應,得到雷達在該現場使用環境下的K 值。 雷達散射截面參數校準過程如圖4所示。
連續波雷達散射截面參數現場校準方式分為設備定期校準和試驗實時校準。 設備定期校準是指針對連續波雷達散射截面參數按照設定的周期進行常規現場校準,其目的是在一定程度上保證連續波雷達天線常數K 的準確性,為連續波雷達散射截面參數測量做基本保障。
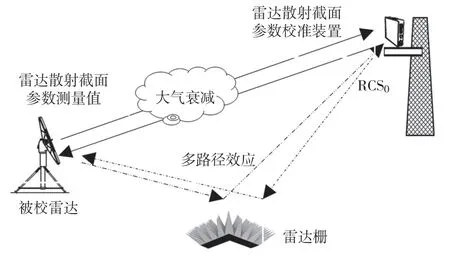
圖4 連續波雷達RCS 參數校準示意圖Fig.4 CW Radar RCS Parameter Calibration diagram
試驗實時校準是指針對武器型號現場試驗時進行的專項校準,其校準修正流程如圖5所示[8]。
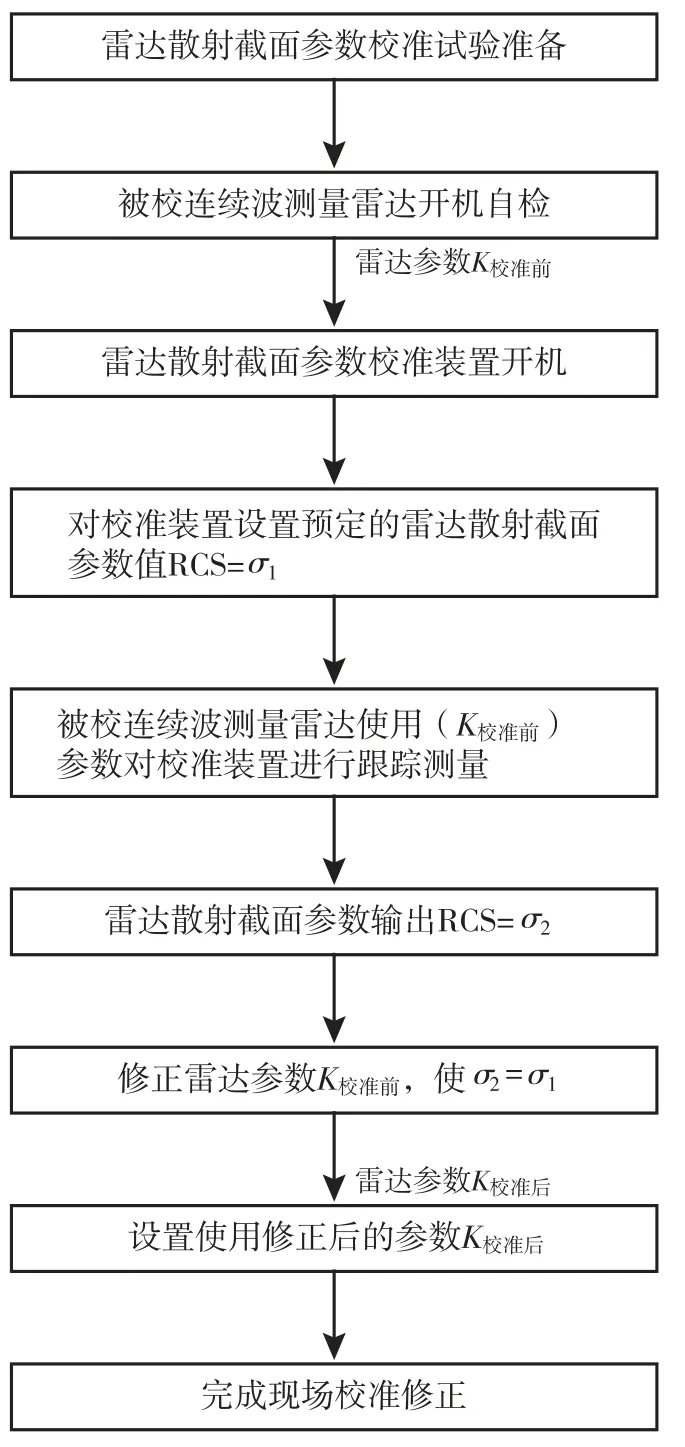
圖5 連續波測量雷達RCS 參數現場校準修正流程圖Fig.5 CW Radar RCS Parameter Calibration correction flow diagram
如圖5所示,根據外界環境變化情況在試驗前后分別對連續波雷達散射截面參數進行校準,保證雷達測量過程與現場校準過程外界環境條件盡可能一致,消減由于外界環境隨時間變化引入的測量誤差,得到雷達在該現場使用環境下的K 值,提高連續波雷達對目標雷達散射截面參數的實時測量精度。
3.5 雷達散射截面參數現場校準的不確定度分析
3.5.1 不確定度來源分析
本項目對校準源現場量值傳遞進行了不確定度評定。 評定過程中對各參數不確定度采用不確定度分量合成方法。 標準不確定度的來源包括A類不確定度和B 類不確定度,A 類不確定度是由測量重復性定義的,B 類不確定度的來源主要包括:試驗現場的量值傳遞引入的測量不確定度分量、校準源本身引入的測量不確定度分量等。
1)重復性引入的測量不確定度uA
當測量儀器在同樣的環境和設置條件下,測量結果的范圍將會在不確定度窗口中,測量重復性定義了這個范圍的大小。
2)試驗現場的量值傳遞引入的測量不確定度uB1
現場測試中,由現場環境引起的雷達散射截面參數量值傳遞過程中的測量誤差是不可避免的,因此,可采取高塔測試及增加現場吸波材料面積的測試方法,將現場環境引起的測量誤差減小到最低,得出該項不確定度分量。
3)校準源本身引入的測量不確定度uB2
校準源本身在校準過程中對雷達散射截面參數的產生數值也與真值之間存在誤差,該誤差分量會對現場量值傳遞造成影響,不確定度見表1。
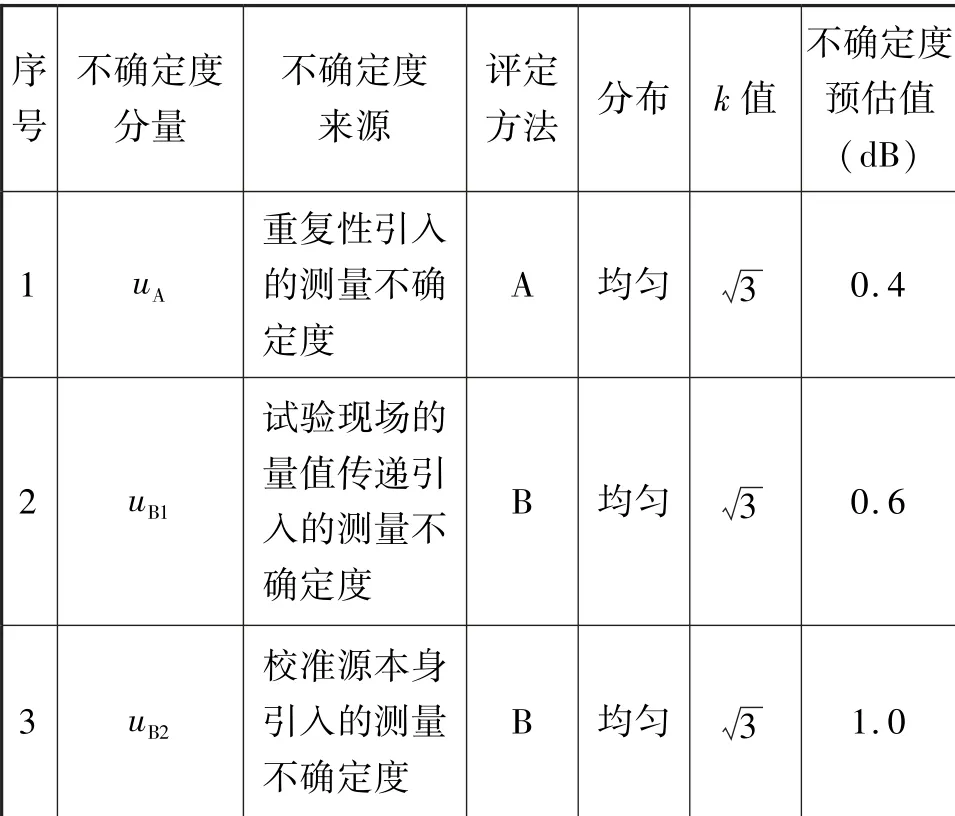
表1 雷達散射截面參數現場校準的不確定度Tab.1 Radar RCS Parameter Calibration Uncertainty
3.5.2 合成不確定度

3.5.3 擴展不確定度

4 結束語
本方案基于有源校準的原理,應用雷達目標模擬、無線電射頻、標準核查等技術,提出了一種高精度雷達散射截面參數校準技術。 使雷達散射截面參數校準的不確定度小于2.5dB,解決了雷達散射截面參數現場校準的準確度問題,保證了雷達散射截面參數的量值傳遞的準確性,為武器系統性能的準確評定提供可靠保障。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
