無人機動態校準系統研究
2019-03-25 02:36:10黎瓊煒李效輝朱春陽
宇航計測技術 2019年1期
黎瓊煒 李效輝 劉 旋 朱春陽
(北京航空工程技術研究中心計量站,北京100076)
1 引 言
近年來,以“翼龍”、“彩虹”為代表的中國無人機技術獲得長足發展,在反輻射無人機、隱身無人機以及無人機集群等領域緊跟國際前沿甚至局部領先。
目前,國內無人機計量工作主要集中在研制生產過程中的計量保證工作,使用維護階段的計量保障還處于一種初級階段。 型號研制生產單位編制《計量保證大綱》,對研制、生產、試驗過程進行計量控制,確保無人機研制、試驗、生產過程中計量單位統一、量值準確一致、測量數據可靠[1,2]。 由于沒有很好地貫徹GJB 5109《裝備計量保障通用要求檢測和校準》[3],無人機在交付使用后,缺少預留的測試接口和專用的測量校準設備,現場維護人員無法對其進行校準或檢定,一般采用高可靠性設計思路,依靠PMA 自動測試程序獲取傳感器狀態;基層使用維護人員在對整機性能驗證時,大多采用“拉距離”的方式,對無人機進行簡易測試。
針對無人機使用維護階段的計量保障需求,結合無人機使用特點,在無人機各參數指標進行深入分析的基礎上,筆者提出以無線電數據鏈路計量保障為重點的無人機動態校準設計方案。
2 無人機系統分析
2.1 無人機系統組成
我們按照功能將無人機系統分四部分。
1)無線電測控系統
這一部分也稱為數據鏈系統,包括遙測、遙控、跟蹤測量設備,信息傳輸設備,數據中繼設備等,用以指揮操縱無人機飛行,并將無人機的狀態參數及偵察信息數據傳到控制站[4,5]。 因為數據鏈的信息中幾乎包含了無人機系統的所有狀態信息,因此對數據鏈的校準是無人機校準的重點;
2)飛行器系統
包括無人機,發射與回收設備,飛行控制與導航設備,傳感器裝置等,主要用以保證飛機完成各種飛行動作;
3)任務系統
包括為完成各種任務而需要在無人機上裝載的各類設備;
4)保障系統
包括各類檢測校準設備,維修設備,運輸設備,后勤設備等。
2.2 無人機計量保障需求
現有無人機的維修保障采用二級維修模式:在基層級,通過PMA 獲取機載傳感器狀態并初始化傳感器,更換LRM;在基地級對無人機進行拆解和修理。 這種維修保障模式使得傳統計量保障模式不再適用。
傳統手段需要對無人機部件進行拆解,按照通用校準檢定規程,在實驗室環境下,由專業計量人員進行校準測試。 這種方法的測試步驟復雜,同時會降低部分關鍵部件的可靠性,且不能直接反映整機性能。 傳統的計量是將無人機各組成要素作為獨立的對象處理,開展的主要是單設備計量。 在這種方式下,即使無人機所有單元均計量合格,也不能保證整機能達到應有的效能。
因此,需要在無人機計量保障中推行全系統計量理念,核心是研究和建立無人機全系統的計量參數體系、計量方法和計量手段,解決系統間互相影響的問題,精準掌控無人機系統級技術狀態,支撐體系對抗能力的形成和保持。
3 無人機動態專用校準系統研究
3.1 工作原理
利用雷達和無線電通信技術,采用多點定位的方法,模擬不同條件下的電磁環境,擬合航行軌跡的方式[6-8],對無人機的飛行性能、動力裝置、起飛/著陸、飛行控制系統、導航系統、機械電子電氣設備、無線電測控與信息傳輸系統、地面控制站、機載任務系統,進行整機計量,驗證無人機的整機參數。
3.2 動態專用校準系統組成
無人機動態校準系統由電磁環境模擬分系統、無線電信號測量分系統和校準數據處理分系統組成。
1)電磁環境模擬分系統主要作用是模擬真實場電磁環境背景,確定不同干擾信號強度對無人機系統的影響;
2)無線電信號測量分系統在模擬的電磁環境條件下,采用非接觸方式,對無人機系統機載和地面控制站之間的數據鏈進行真實信號測量,并利用無線定位手段繪制航行軌跡,分析無人機真實狀態;
3)校準數據處理分系統對不同數據進行記錄、不確定度分析和指標判定,并完成檢定或校準證書的生成等工作。
3.3 電磁環境模擬分系統
電磁環境模擬分系統由一個多通道數字信號發生器產生可能對無人機數據鏈造成干擾的短波、超短波、微波等頻段內所有信號,通過功率放大,和選用高增益天線,在劃定區域內模擬出復雜的電磁環境,并調整信號增益,通過測量信號質量的變化或鎖定電平的變化,得到不同功率的干擾信號對無人機數據鏈系統的影響。 系統組成如圖1所示。
電磁環境模擬分系統主要功能如下。
1)具備時域、空域、頻域、能量域等多維構設能力;
2)具備播放預先采集的背景信號,并可編輯、篩選播放信號,實現特定區域背景電磁環境搬遷;
3)具備對多頻段、多種樣式電磁信號模擬重構功能,可根據重構策略按時域、空域、頻域、能量域動態模擬背景電磁信號,并具有可編程能力;
4)具備電磁信號、信道數字化生成能力,可與實際環境采集數據進行融合為無人機試驗推演與評估,整機性能校準提供電磁環境數據支持;
5)具備機動式構設能力,具備本地控制、遠程控制、集中控制其他電磁信號模擬設備的能力;
6)具備數據記錄管理功能,能夠記錄系統工作日志、設備狀態、生成信號等信息,可建立電磁環境信息數據庫,可進行數據庫導入、導出、檢索、編輯等操作;
7)具備系統運行狀態實時監視功能,可觀察二維/三維電磁態勢,可與計量保障基地測控系統互聯,實現信息交互功能;
8)具備時間統一和尋北定位功能。
3.4 無線電信號測量分系統
無線電信號測量分系統采用一體化多天線模式,按照小型化、集成化要求,以多點組網測試為主,也可完成獨立校準測試任務。 在執行計量保障任務時,通過部署于無人機起降機場周邊或特定試驗區域,采取遠程遙控方式或人工現場操控方式完成無線信號的監控和測量。
該分系統可以實現寬頻段、多種類信號的功率、頻率等參數的測試和校準,并利用信號監測技術描繪出無人機航線軌跡,從而準確獲得飛行高度、速度、定位精度、通信能力、抗干擾能力等無人機關鍵性技術指標參數校準數據。 無線電測量分系統的組成如圖2所示。
無線電測量分系統主要功能如下。
1)信號測向和定位
具備單信號測向、寬帶多信號測向、離散信道測向、觸發測向等功能,能夠利用多個無線電測量分系統組網,采用交匯定位的方式,獲取無人機位置信息,并在態勢顯示軟件中顯示定位結果,鎖定跟蹤無人機;
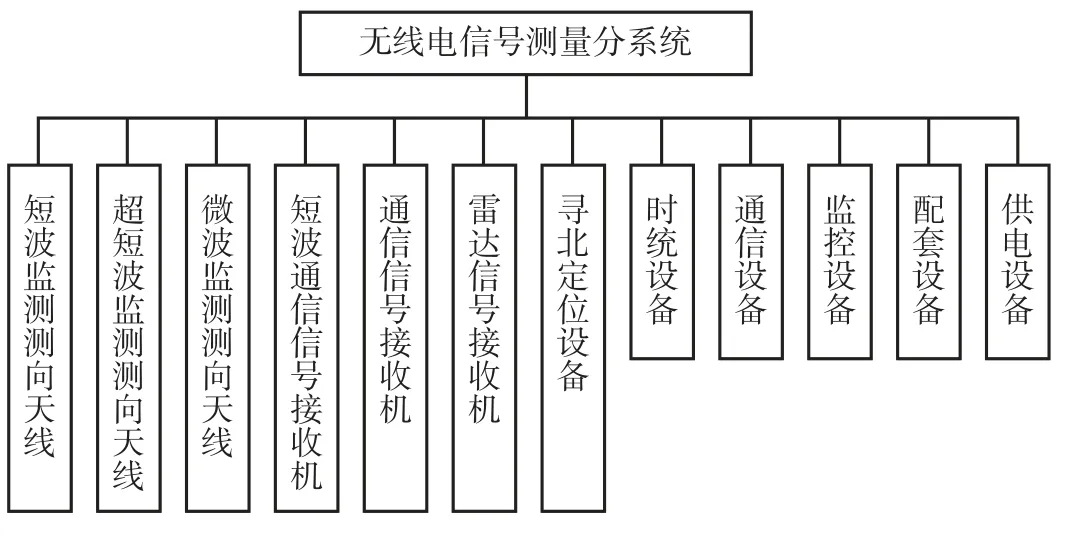
圖2 無人機動態校準系統無線電測量分系統框圖Fig.2 The radio measurement subsystem of dynamic calibration system for UAV
2)信號測量
測試頻率、場強、帶寬、調制樣式、碼速率、脈寬、功率等參數;
3)頻段掃描監測;
4)監聽錄音
能夠對指定的AM,FM,USB 等語音信號進行監聽,可根據設定條件錄音,根據頻段、時間段等組合條件選擇回放,并顯示音頻波形;
5)告警功能
比照標準基礎數據庫實現對監測頻段信號的自動告警;
6)瞬態信號監測
能夠捕捉瞬態信號,并完成瞬態信號累積顯示;
7)數據管理
具有測量信息數據庫,具有記錄系統工作日志、設備狀態、生成信號的功能;
8)控制功能;
9)電子地圖;
10)具備自動尋北定位能力;
11)具有系統自檢、故障診斷告警及系統狀態實時監視上報功能;
12)具備時間統一功能。
3.5 測向和定位
傳統的雷達和GPS 定位系統能夠提供運動目標某時刻的精確位置,但是缺乏運動目標的狀態信息(如運動速度和方向等),雷達在利用多普勒效應在測速時,只能提供速度信息,無法準確提供運動位置和方向。 光電經緯儀是迄今為止在空間動態目標定位測量中精度最高的航跡測量系統,由于其具有實時、高精度、動態跟蹤和圖像再現等優點,在飛行試驗中被廣泛采用。 這種方法需要在無人機上安裝激光反射器,不符合實際工作需要,光電經緯儀還需要輔助外跟蹤雷達等設備,成本高,架設復雜。 另外,測量算法的精確性和測試方法的完備性在很大程度上影響到測量結果的準確性,通常由于對觀測數據的誤差修正不夠完善,并在交會計算中常常將大目標當作點目標對待,對于機動飛行的大目標就產生了計算模型的原理性誤差和方法誤差。 同樣目標布站幾何、站址系統誤差也嚴重影響測量精度。
為了能夠實現精確定位并描繪航行軌跡,我們在無人機動態校準系統中,采用時差定位TDOA 技術提高測向和定位準確度。 時差定位測向是通過測出電波從發射機傳播到多個接收機的傳播時間差(TDOA)來確定目標移動臺的位置。 對于TDOA方法,可通過直接計算TOA 差值或直接估計時延差等方法得到TDOA 測量值,一個TDOA 測量值對應的是以兩個接收機為焦點的一對雙曲線,多個TDOA 測量值對應的多條雙曲線的交點即為移動無人機的位置,如圖3所示。
3 個測試點的接收機可以選用TDOA 專用室外接收機,目前該產品技術成熟,價格相對較低,和主站(無線電測量分系統)組網,可以精確測量位置、速度等信息,該方法對于合作目標而言,主要受GPS時鐘影響,位置準確度可達米級,合作目標的位置越遠,相對誤差越小。
3 個TDOA 測向接收機和無線電測量系統位于4 個不同位置的站點上,同時接收一個信號,經過相關運算,計算其到達信號的時間差,根據時間差曲線確定檢測信號的方位。 系統采用快速時差定位技術測向,根據目標信號的帶寬,采用接近奈奎斯特采樣定位的采樣率對信號進行采樣,大幅降低數據傳輸量,同吋通過改進時差定位算法,只要較短的有效時間數據就能得到高精度時差定位方向。
通過對移動目標的定位,系統可以實現對最大航行高度、航行速度、無人機導航系統等多個指標或設備進行校準測試。
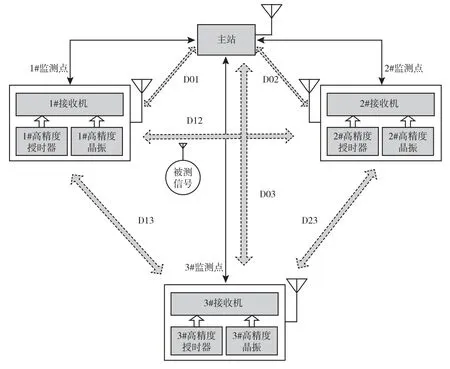
圖3 時差定位校準方法原理圖Fig.3 The principle of the TDOA calibration method
4 結束語
本文提出的無人機動態校準計量保障方案還處于試驗階段。 希望通過更為深入地研究,為基層提供實用、好用的計量保障設備,進一步豐富和完善無人機計量保障手段,全面提升計量保障能力。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
