基于列車控制與管理系統(tǒng)的車輛制動力管理方案設(shè)計
2019-03-27 09:12:58王華偉劉國梁
城市軌道交通研究 2019年2期
王華偉 劉國梁
(中車長春軌道客車股份有限公司工程研究中心, 130062, 長春//工程師)
早期的城市軌道交通車輛中,列車控制與管理系統(tǒng)(train control and management system,TCMS)的硬件可靠性低,整個系統(tǒng)與各子系統(tǒng)功能關(guān)聯(lián)度也比較低。近年來,隨著我國各大中型城市軌道交通的快速發(fā)展,TCMS技術(shù)也在迅速發(fā)展,無論是硬件研發(fā)還是列車控制軟件復(fù)雜程度都得到了質(zhì)的飛躍,TCMS參與整車控制的功能越來越多。
在傳統(tǒng)列車制動力管理策略中,通常由制動系統(tǒng)進行整列車制動力需求的計算和分配。制動系統(tǒng)控制的管理方式是平均分配各車電制動力,無法最大限度地發(fā)揮電制動能力的要求,并存在坡道啟動過程沖動過大、頻繁補充空氣制動等問題。
本文基于深圳地鐵某A型車項目,從TCMS與制動系統(tǒng)接口、列車制動力的分配原則、制動指令的處理及制動過程不同階段的處理方案等方面,介紹一種全新的基于TCMS的城市軌道車輛制動力管理方案。
1 方案設(shè)計
1.1 網(wǎng)絡(luò)系統(tǒng)與制動系統(tǒng)接口
列車為6輛編組,兩個端車為拖車,中間4個車輛為動車。TCMS通過多功能車輛總線(MVB)與制動控制器網(wǎng)關(guān)閥進行通信(見圖1)。制動系統(tǒng)內(nèi)部通過控制器局域網(wǎng)(CAN)總線進行通信。為保證信息的實時性,網(wǎng)絡(luò)系統(tǒng)及制動系統(tǒng)之間的控制及狀態(tài)信息的MVB端口輪詢周期設(shè)定為64 ms,故障信息端口輪詢周期設(shè)定為256 ms。
1.2 電空混合制動原則
列車制動方式包括電制動和空氣制動,其中電制動由牽引系統(tǒng)施加,空氣制動由制動系統(tǒng)施加。實施原則是電制動優(yōu)先,空氣制動作為制動力不足時的補充,電制動與空氣制動實時協(xié)調(diào)配合。當電制動不足時,優(yōu)先在拖車和電制動故障的動車上補充空氣制動,達到最大黏著后,再在電制動正常的動車平均補充空氣制動。當車輛速度低于某一限定值時,電制動逐步由空氣制動替代。為了減少對制動閘瓦的磨耗,同時又保證制動需求,電、空制動轉(zhuǎn)換時的列車速度要求盡量低,沖動率不大于0.75 m/s2。
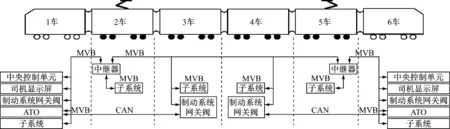
圖1 TCMS與制動系統(tǒng)接口框圖
1.3 電空混合制動交互信息
制動系統(tǒng)每3輛車為一個單元編組,每個單元編組設(shè)有2個網(wǎng)關(guān)閥,網(wǎng)關(guān)閥通過TCMS與牽引控制單元(DCU)之間進行信息交互。相互間傳輸信號如圖2所示。TCMS、DCU及制動系統(tǒng)間信號流說明如表1所示。

圖2 TCMS、牽引系統(tǒng)和制動系統(tǒng)信號流框圖
1.4 制動指令的發(fā)出
TCMS根據(jù)司控器或列車自動駕駛(ATO)系統(tǒng)給出的制動指令,獲取最大等效減速度百分比,結(jié)合從制動系統(tǒng)獲得的各車包含轉(zhuǎn)動慣量的車重信息進行總制動力的計算,并把計算值發(fā)送給制動系統(tǒng)。最大常用制動等效減速度初定值一般為技術(shù)條件中規(guī)定的最大常用制動值(1.12 m/s2),該值在列車型式試驗過程中需根據(jù)列車的實際制動特性進行調(diào)整。
1.5 電制動力分配
TCMS根據(jù)制動指令和各車牽引變流器的可用電制動力信號,把計算得到的列車所需總制動力分配給4個牽引變流器。牽引系統(tǒng)結(jié)合沖動率限制(≤0.75 m/s3)、車重修正系數(shù)(由TCMS得到)及可用電制動力大小等條件施加電制動。
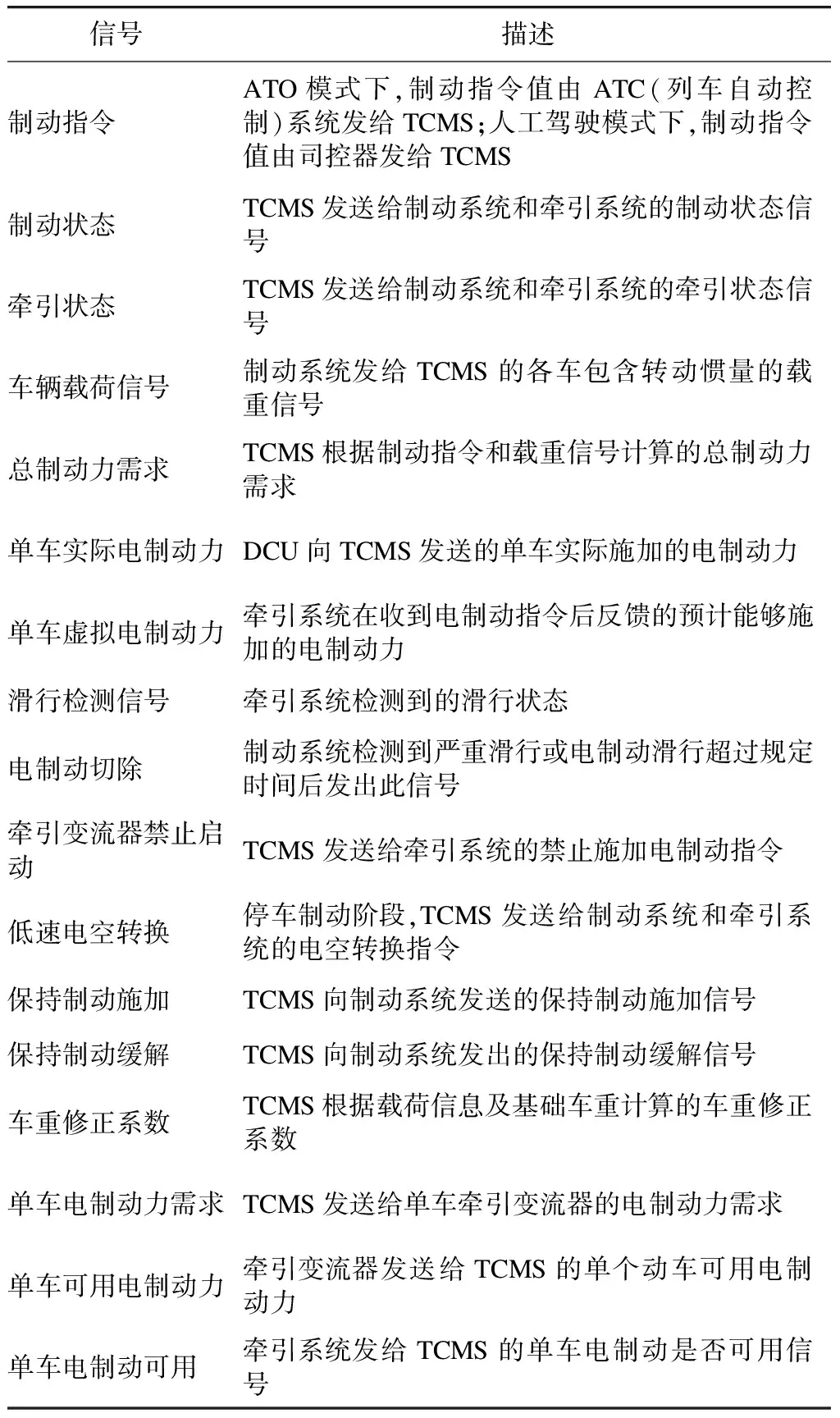
表1 TCMS、DUC及制動系統(tǒng)信號流說明
TCMS發(fā)出制動狀態(tài)和制動指令值給牽引系統(tǒng)后,牽引系統(tǒng)發(fā)送單車虛擬電制動力給TCMS,TCMS轉(zhuǎn)發(fā)此信號給制動系統(tǒng)。為防止在電制動建立階段補充空氣制動,制動系統(tǒng)在接收到制動狀態(tài)后的一段時間內(nèi)按照此值計算需要施加的空氣制動力。該段時間過后,制動系統(tǒng)根據(jù)TCMS發(fā)送的各動車實際施加的電制動力情況來施加空氣制動。牽引系統(tǒng)電制動力上升到最大值的時間一般在1.5~2.0 s之間,初始值定為1.5 s。
1.6 空氣制動分配
制動系統(tǒng)負責空氣制動力的分配,空氣制動力的分配原則為:當電制動力不足時優(yōu)先在拖車(若此時有動車電制動不可用,則以拖車處理)補充空氣制動;若拖車補充的空氣制動力達到拖車最大黏著后整車施加的總制動力還未滿足整車制動需求,則制動系統(tǒng)在各動車平均補充空氣制動,制動系統(tǒng)保證在此過程中單車不超出最大黏著限制。
牽引系統(tǒng)和制動系統(tǒng)將在整車調(diào)試階段對電制動和空氣制動的施加及緩解的速率進行調(diào)整,以滿足整車沖動限制。
1.7 電制動滑行處理
當動車在施加電制動過程中出現(xiàn)滑行時,牽引系統(tǒng)進行防滑控制并發(fā)送電制動滑行信號給TCMS,TCMS發(fā)送滑行信號給制動系統(tǒng)。在牽引系統(tǒng)防滑控制過程中,為防止空氣制動補償電制動損失值,制動系統(tǒng)在一定時間內(nèi)鎖存發(fā)生電制動滑行前的實際電制動力。若該動車電制動滑行程度達到制動系統(tǒng)規(guī)定的深度滑行或者超過允許的滑行時間,則制動系統(tǒng)向TCMS發(fā)送電制動切除指令,TCMS向該動車牽引系統(tǒng)發(fā)送電制動切除信號(牽引變流器禁止啟動信號),牽引系統(tǒng)切除該動車電制動。若在電制動滑行過程中制動系統(tǒng)發(fā)出電制動切除信號,則在本次制動過程中,制動系統(tǒng)禁止已切除電制動的牽引變流器再次施加電制動。當列車靜止或者列車進入惰行或者牽引狀態(tài)且速度大于20 km/h時,制動系統(tǒng)撤銷電制動切除信號。
1.8 停車制動
停車制動分為4個階段:低速電空轉(zhuǎn)換;純空氣制動的停車制動;保持制動施加;保持制動緩解。
1.8.1 低速電空轉(zhuǎn)換
列車制動時,在車速降到某個速度點時,開始低速電空混合制動,TCMS向制動系統(tǒng)和牽引系統(tǒng)發(fā)出電制動退出信號(電平信號),電制動衰減,空氣制動開始上升。為防止電制動和空氣制動在轉(zhuǎn)換過程中發(fā)生沖動,電制動衰減的斜率和空氣制動上升的斜率應(yīng)基本一致,通常該斜率折合為加速度的變化率。根據(jù)以往項目經(jīng)驗,制動系統(tǒng)和牽引系統(tǒng)在電空轉(zhuǎn)換階段的制動力變化斜率折合為加速度的變化率值為1 m/s3。
一旦進入低速電空混合制動階段,制動級位的改變不影響電制動按照規(guī)定的斜率退出;低速電空混合制動過程中,TCMS發(fā)給制動系統(tǒng)的制動力需求為司控器或ATO指令的實際需求值,制動系統(tǒng)根據(jù)制動力需求施加空氣制動。
若在低速電空轉(zhuǎn)換階段司控器由制動位回到惰行位,牽引系統(tǒng)退出電制動狀態(tài),制動系統(tǒng)緩解空氣制動;若在低速電空轉(zhuǎn)換階段司控器由制動位回到牽引位,牽引系統(tǒng)退出電制動并根據(jù)牽引手柄級位施加牽引力,制動系統(tǒng)緩解空氣制動。列車速度在電空轉(zhuǎn)換速度點及以下時,若司控器由牽引或者惰行位改變到制動位,不施加電制動,制動完全由空氣制動實施。
1.8.2 純空氣制動的停車制動
當?shù)退匐娍辙D(zhuǎn)換完成時,電制動完全退出,空氣制動完全取代電制動。空氣制動力的值取決于司控器或ATO給出的制動指令。制動系統(tǒng)在此過程中負責控制整車沖動限制。
1.8.3 保持制動的施加
在人工駕駛模式及網(wǎng)絡(luò)故障和備用模式下,無牽引指令并且當列車進入靜止狀態(tài)時,保持制動的施加由制動系統(tǒng)自動完成;在ATO模式下,保持制動的施加指令由TCMS發(fā)給制動系統(tǒng)來完成;在ATO模式下,若列車已經(jīng)進入靜止狀態(tài),如3 s內(nèi)TCMS未發(fā)出保持制動施加指令,則制動系統(tǒng)自動施加指令以保持制動。保持制動施加的邏輯如圖3所示。制動系統(tǒng)施加的保持制動力,取最大常用制動力(經(jīng)載荷修正)的70%和當前整車制動力需求的最大值。
1.8.4 保持制動的緩解
在人工駕駛模式和ATO模式下,當滿足以下兩種情況中的任何一種時,TCMS向制動系統(tǒng)發(fā)出保持制動緩解指令:
(1) 當有牽引指令,并且整車實際施加的牽引力大于不同載荷下規(guī)定的保持制動緩解的牽引力時,緩解保持制動的牽引力從空載(AW0)到超載(AW3)工況線性增加。
(2) 當有牽引指令,并且列車速度大于1 km/h時,為防止在人工駕駛模式和ATO模式下TCMS未及時發(fā)出保持制動緩解指令,制動系統(tǒng)在檢測到有牽引指令且列車速度大于1.5 km/h時,自動緩解保持制動。在TCMS與制動系統(tǒng)間通信故障模式和備用模式下,當制動系統(tǒng)檢測到有牽引指令時,制動系統(tǒng)自動緩解保持制動。保持制動緩解的邏輯如圖4所示。
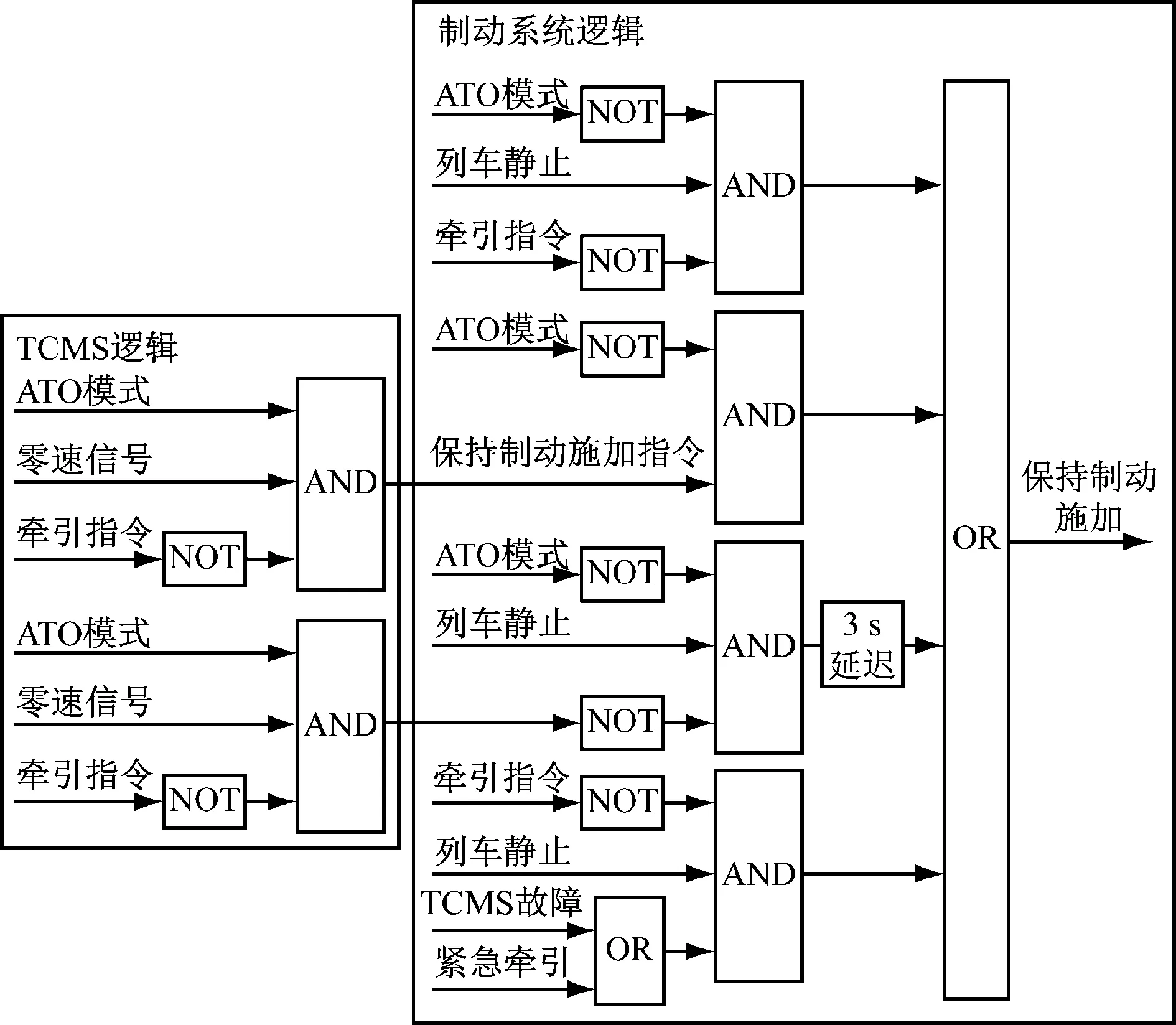
圖3 保持制動施加的邏輯框圖
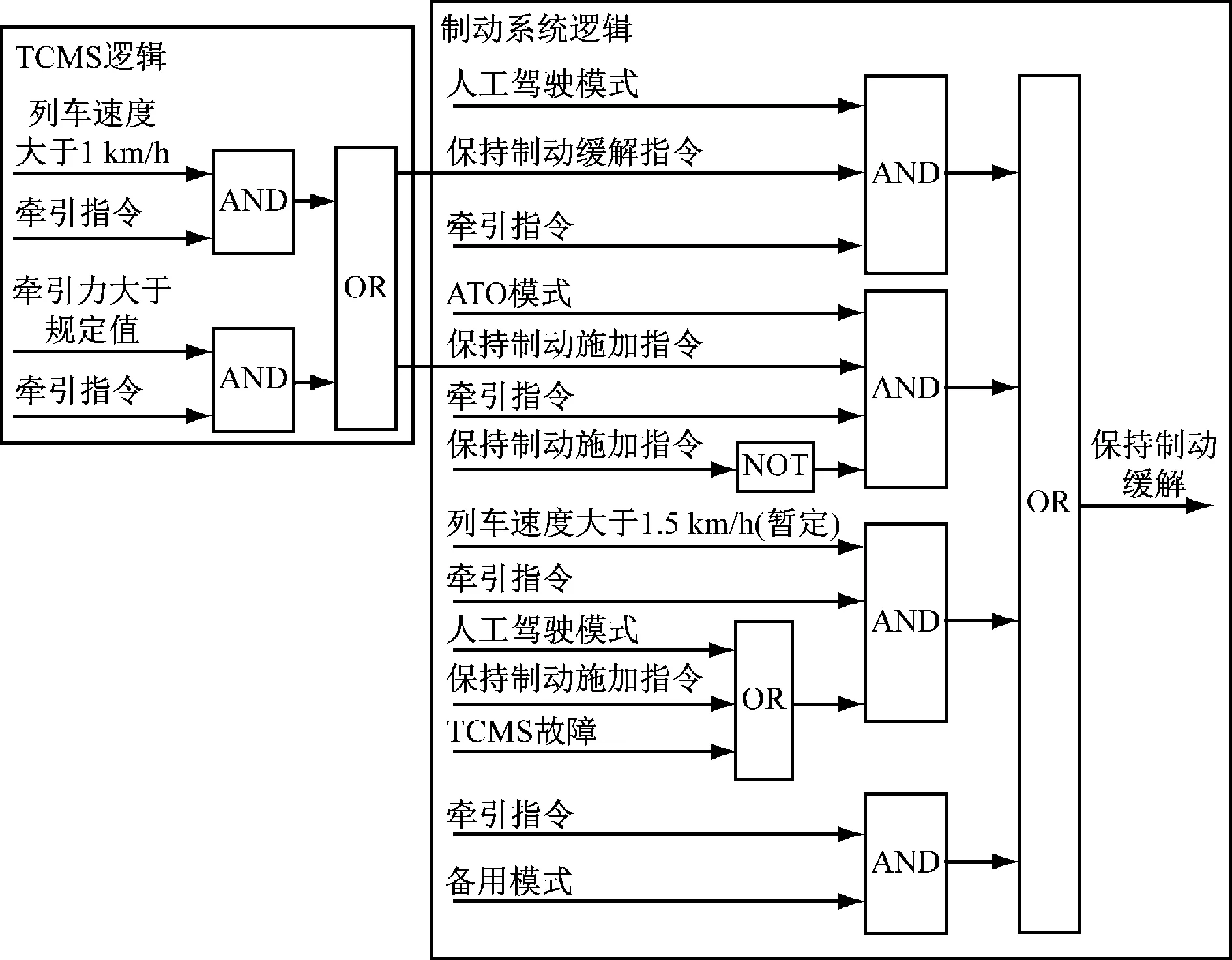
圖4 保持制動緩解的邏輯框圖
1.9 快速制動
當TCMS檢測到快速制動硬線指令后,對制動力按正常的常用制動模式進行管理,平均減速度為1.3 m/s2。網(wǎng)絡(luò)系統(tǒng)用于計算總制動力的等效減速度在整車調(diào)試階段確定。
快速制動指令優(yōu)先。從安全制動優(yōu)先的角度出發(fā),只要快速制動硬線指令激活,不管當前來自網(wǎng)絡(luò)或者硬線的牽引和制動指令是否激活,制動系統(tǒng)均按快速制動處理。
在TCMS與制動系統(tǒng)間通信正常時,當快速制動硬線指令激活,TCMS和制動系統(tǒng)各自計算整車制動力需求:TCMS根據(jù)其計算的整車制動力需求,分配電制動力;制動系統(tǒng)根據(jù)其計算的整車制動力需求和TCMS經(jīng)MVB總線發(fā)送的電制動力值,計算并施加空氣制動力。在TCMS與制動系統(tǒng)間通信故障或備用模式下,當制動系統(tǒng)檢測到快速制動硬線指令被激活,將自行計算整車制動力需求并施加純空氣制動力。
2 試驗驗證
為驗證本管理方案,制動系統(tǒng)除常規(guī)的制動試驗項點外,需增加相關(guān)驗證計算和參數(shù)調(diào)試確定。制動系統(tǒng)本身參數(shù)調(diào)試不是本文討論重點,以下僅介紹TCMS與制動系統(tǒng)間的相關(guān)接口參數(shù)調(diào)試。
2.1 發(fā)送給制動系統(tǒng)的總制動力需求調(diào)試
在整車調(diào)試時發(fā)現(xiàn):① 在主控手柄由最大牽引迅速轉(zhuǎn)換到最大制動時,或者在制動級位由小級位快速變換為大級位時,若TCMS直接發(fā)送制動級位,則制動系統(tǒng)在電制動建立的過程中會立刻補充空氣制動(見圖5)。這是由于制動系統(tǒng)只在2 s內(nèi)檢測到手柄由牽引位或惰行位轉(zhuǎn)換到制動位時,即使用虛擬電制動力值;若手柄由最大牽引位快速轉(zhuǎn)換到最大制動位時,牽引系統(tǒng)由最大牽引狀態(tài)到施加最大電制動力需要3 s左右的時間,故制動系統(tǒng)會在2 s后補充空氣制動。② 制動級位由小級位快速轉(zhuǎn)換到大級位時,在電制動建立的過程中,制動系統(tǒng)會立刻補充空氣制動。
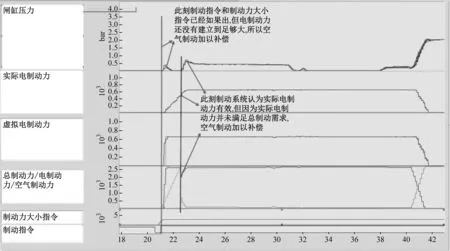
圖5 制動指令按手柄實際制動級位發(fā)出的界面
為避免上述兩種情況發(fā)生,TCMS軟件最終調(diào)整為在100 ms 的TCMS軟件運行周期內(nèi),牽引/制動參考值增加6.67%(快速制動時制動指令直接按照最大值計算),參考值的變化范圍為-100%~100%。經(jīng)此修改后,可避免上述兩種情況下空氣制動會自動補充的發(fā)生(見圖6)。
2.2 最大常用制動等效減速值調(diào)試
TCMS根據(jù)加速度公式計算列車總制動力。在列車型式試驗時,需以列車最大常用制動的減速度(1.12 m/s2)為目標調(diào)整計算公式中的加速度值a。最終調(diào)試后確定a=1.14 m/s2。

圖6 制動指令以一定斜率發(fā)出的界面
2.3 空氣制動延時施加時間參數(shù)調(diào)試
在調(diào)試過程中,需調(diào)整電制動施加初期制動系統(tǒng)禁止施加空氣制動的時間,該時間參數(shù)初始值為1.5 s。該時間參數(shù)確定方法為:最大載荷情況下,列車施加最大常用制動,牽引系統(tǒng)觀測電制動力上升到最大值的時間,即確定為最終的參數(shù)。通過試驗,本方案此時間參數(shù)設(shè)定為2 s。
2.4 制動系統(tǒng)發(fā)送的電制動切除時間參數(shù)調(diào)試
當出現(xiàn)電制動滑行后,制動系統(tǒng)切除電制動信號的處理直接影響到制動性能。若牽引系統(tǒng)調(diào)整滑行時間過長,則制動距離增加,列車可能會冒進或者發(fā)生停車對標不準。更為嚴重的是,若發(fā)生嚴重的電制動滑行,而制動系統(tǒng)未及時切除電制動,可能會造成輪對擦傷的嚴重故障。
電制動切除時間參數(shù)確定在滑行試驗過程中進行,該時間參數(shù)會由于列車采用不同供應(yīng)商的制動系統(tǒng)和牽引系統(tǒng)而發(fā)生變化,但確定該參數(shù)的原則只有一個,即保證制動距離并且最大程度防止輪對的擦傷。經(jīng)過調(diào)試,本方案確定:當發(fā)生嚴重滑行時,制動系統(tǒng)立即切除電制動;如果電制動滑行未達到制動系統(tǒng)規(guī)定的滑行深度5 s后,制動系統(tǒng)切除電制動。
2.5 低速電空制動轉(zhuǎn)換速度點調(diào)試
低速電空制動轉(zhuǎn)換速度點的確定對于制動閘瓦的磨耗及乘客舒適度有著相當大的影響:若設(shè)定的速度點過高,則電制動過早退出,空氣制動過早施加,制動閘瓦使用率增大,導(dǎo)致閘瓦損耗增加;若電空制動轉(zhuǎn)換速度點過低,則在低速段,由于牽引系統(tǒng)的電制動控制不精確,電制動的退出斜率不能穩(wěn)定在規(guī)定值,導(dǎo)致列車沖動過大,影響旅客舒適度。根據(jù)以往項目經(jīng)驗,電空轉(zhuǎn)換點選擇在6~8 km/h之間。本方案最終確定低速電空制動轉(zhuǎn)換速度點為8 km/h。
2.6 低速電空轉(zhuǎn)換電制動退出信號時間參數(shù)調(diào)試
由于電制動施加的速率快于空氣制動的速率,為保證兩種制動變化的一致性,在低速電空轉(zhuǎn)換時,電制動一般應(yīng)延后于空氣制動動作。經(jīng)現(xiàn)車調(diào)試,本方案TCMS在向制動系統(tǒng)發(fā)送電制動退出信號后,延時200 ms向牽引系統(tǒng)發(fā)出電制動退出信號。
2.7 緩解保持制動牽引力參數(shù)調(diào)試
網(wǎng)絡(luò)系統(tǒng)緩解保持制動的條件之一為整車實際施加的牽引力大于規(guī)定值,該值的確定主要考慮以下兩方面問題:① 保證列車的啟動舒適性;② 防止起車階段,列車倒溜。若緩解保持制動的牽引力設(shè)置偏大,則起車時司機需給出較大的牽引級位,列車沖動較大;若緩解保持制動的牽引力設(shè)置偏小,則在坡道較大的線路起車時,由于牽引力小于列車的下滑力,容易引起向后溜車的安全事故。經(jīng)現(xiàn)車調(diào)試,本方案緩解保持制動的牽引力根據(jù)整車不同載荷,確定為從AW0到AW3載荷按照115 kN到180 kN線性增加。
3 結(jié)語
本文介紹了一種新的城市軌道交通車輛制動力管理策略。該策略優(yōu)點主要有:① 充分利用電制動力,減少空氣制動閘瓦損耗,既節(jié)約了能源,又降低了維修成本;② 減小電制動和空氣制動轉(zhuǎn)換過程中的沖動率,增強乘客舒適度;③ 加強TCMS對列車的控制能力,加強TCMS、制動系統(tǒng)及牽引系統(tǒng)在列車制動過程中的協(xié)同性。該制動力管理方案已應(yīng)用于多個城市軌道交通線路的車輛系統(tǒng)中,運用效果良好,取得了較好的社會效益和經(jīng)濟效益。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2018年12期)2018-08-01 00:47:44
制造技術(shù)與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46