接觸線雙目視覺測量系統標定及立體校正方法研究
2019-03-28 09:10:18
制造業自動化 2019年3期
(青島大學 機電工程學院,青島 266071)
0 引言
接觸線是沿電氣化鐵路鋼軌上空“之”字形架設的高壓輸電線,它通過與電力機車上的受電弓滑板滑動摩擦直接向電力機車輸送電能。接觸線的高度(導高)、拉出值及其與受電弓滑板接觸部分的磨損直接影響電力機車的受流質量和機車的安全運行[1]。因此,在電氣化鐵路建設和運營維護過程中,對接觸線進行快速、準確的檢測是必不可少的。綜觀已有的各種檢測方法[2,3],雙目視覺法是最具潛力的方法,它不僅具有非接觸、速度快、柔性好等優點,而且具有檢測接觸線磨損的能力[4]。但由于接觸線距離遠(導高5370~6450mm)和戶外測量易受干擾等原因,要實現接觸線的高精度檢測,雙目測量系統的結構設計與參數標定非常關鍵。本文采用張正友的平面模板兩步法[5,6],結合接觸線檢測的技術特點,對雙目測量系統的參數標定、相機畸變補償和立體矯正進行理論分析與實驗研究,為實際測量系統的參數優化設計與儀器開發提供理論依據與實驗參考。
1 接觸線雙目視覺測量原理
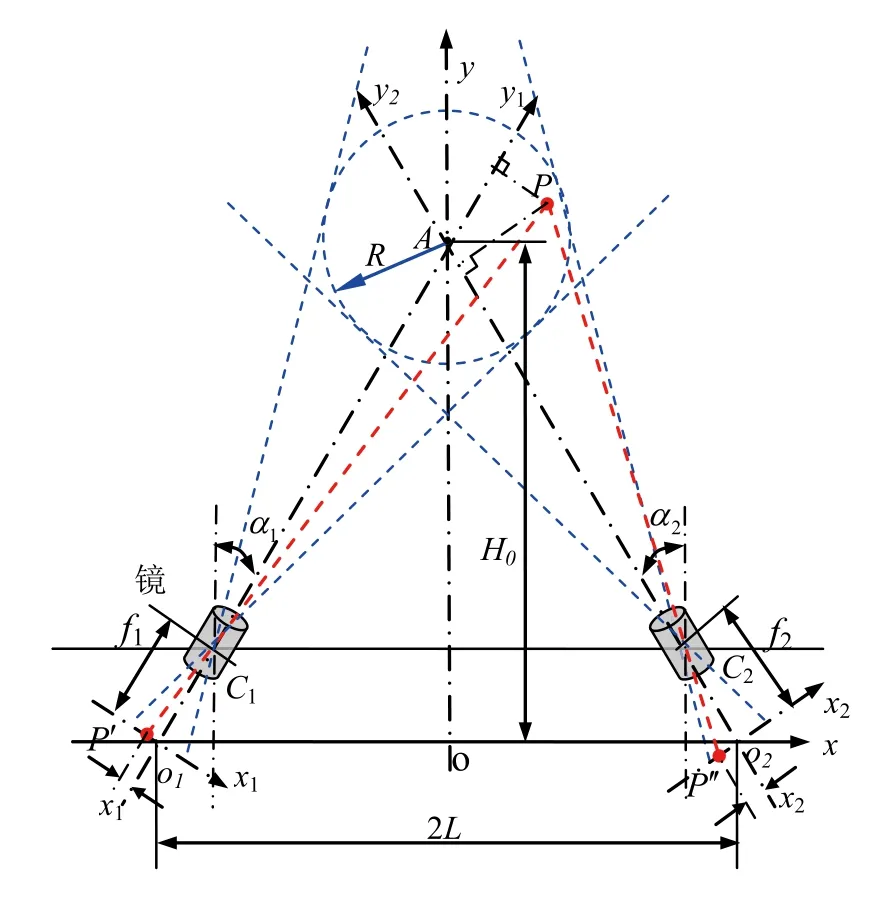
圖1 接觸線雙目視覺測量系統示意圖
基于雙目立體視覺的接觸線檢測系統如圖1所示。兩個結構和性能參數相同(名義上相同,實際上很難做到完全相同)的面陣CCD相機對稱地分布在豎直平面的兩側構成雙目視覺測量系統。其中,f1、f2為左、右相機鏡頭焦距,α1、α2為左、右相機光軸的傾斜角度,理論上應有f1=f2、α1=α2,但實際上難以實現。2L為兩相機像平面中心的距離。為確定被測對象的空間位置,建立坐標系如下:1)測量系統坐標系xoy:以兩個面陣CCD光敏面中心o1和o2連線的中點o為原點,連線o1o2為x軸,方向由o1指向o2為正;y軸豎直向上為正;2)相機坐標系:分別以兩個面陣CCD光敏面中心o1和o2為原點在兩個CCD上建立各自的坐標系x1o1y1和x2o2y2。
設P點為接觸線位置,其在xoy坐標系中的坐標為(x,y);P'(x1,0)和P''(x2,0)分別為P點在兩相機像平面上成像點坐標。根據幾何光學成像原理,可導出:
可見,P點坐標(x,y)取決于x1、x2、f1、f2、α1、α2和L這7個參數。其中任一參數的誤差均會引起測量誤差。因此,必須對測量系統進行標定與立體矯正。
1)f1、f2、α1、α2和L為系統設計的理論值,而實際值相對理論值總是有偏差的,進行標定的目的就是要盡可能準確地確定實際值的大小。
2)式(1)是按幾何光學理想成像公式導出的,沒有考慮成像畸變。因此,需要進行畸變補償,以減小由x1、x2引起的測量誤差。
3)理想情況下,兩個相機的光軸應該共面、而且像平面行對齊,但實際中難以實現,立體校正將實際中非共面非行對齊的兩幅圖像校正成共面行對齊,可減小這一誤差對測量的影響。
2 雙目視覺測量系統標定方法
2.1 相機成像模型
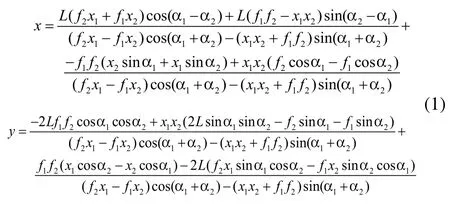
為建立簡化的相機模型,將鏡頭的通光孔徑看做一個小孔,理論上這并不影響成像結果,因此可以只考慮鏡頭光心位置處的光線。一般情況下,相機成像的物距遠大于像距。根據高斯公式[7],可近似認為相機鏡頭的焦點在成像平面上,物、像的方向是相反的。為了簡化數學運算,將原成像平面平移到與物點同側。雖然從物理學的角度來看這是不可行的,但從數學運算的角度進行分析,它們是等價的。簡化后得到的成像模型就是針孔相機模型[8],如圖2所示。圖中,OcXcYcZc為相機坐標系,坐標原點為相機光心Oc;o1xy為圖像物理坐標系,坐標原點為相機主軸與圖像平面的交點o1;x軸、y軸與Xc、Yc軸平行同向。由三角形相似性可得基本投影等式:x=fXc/Zc,y=fYc/Zc。
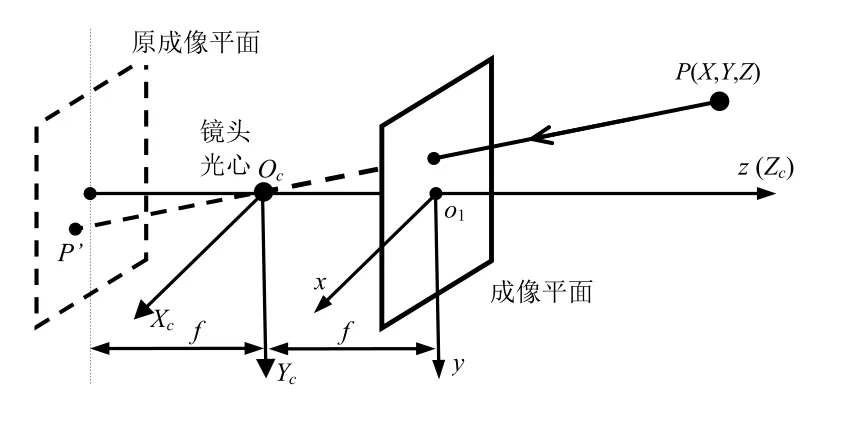
圖2 針孔相機模型示意圖
圖3 坐標系關系示意圖
2.2 相機標定
標定是指建立實際場景點的三維坐標與相機二維投影圖像坐標之間的關系,進而求解相機參數(包括內參、外參及畸變系數)實際值的過程[9]。首先定義4個坐標系,如圖3所示。1)世界坐標系OwXwYwZw,描述物體在三維空間中的位置;2)相機坐標系OcXcYcZc,同圖2;3)圖像物理坐標系o1xy,同圖2;4)像素坐標系o0uv,即將圖像物理坐標點用像素的形式表示,坐標原點在CCD圖像平面的左上角,用o0表示。
具體標定過程是:世界坐標系通過旋轉平移變換到相機坐標系,相機坐標系通過投影變換到圖像物理坐標系,圖像物理坐標系再通過像素轉換到像素坐標系。這一坐標變換過程的數學描述如下:
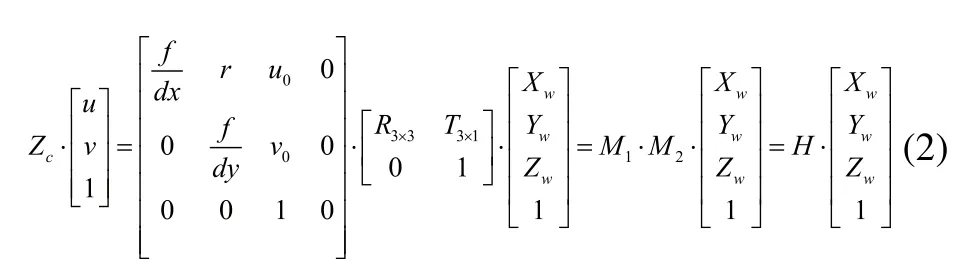
式中,M1為包含內部參數的3×4矩陣;M2為4×4外部參數矩陣;H=M1·M2為單應性矩陣;f/dx、f/dy分別是u軸與v軸的有效焦距;r是圖像橫向u坐標與縱向V坐標軸的不垂直因子,一般可忽略,記為0;u0、v0是主點的像素坐標;R3×3、T3×1表示相機坐標系相對于世界坐標系的位置關系[10]。
以上是不考慮鏡頭畸變的情況,然而鏡頭畸變是一個不可忽略的因素。畸變主要有徑向畸變和切向畸變,而且以徑向畸變為主[5]。設未考慮成像畸變時像點的物理坐標為(x,y),考慮畸變時的實際成像點坐標為(xd,yd),則有:

式中,r2=x2+y2,k1、k2分別為初級和二級徑向畸變系數;p1為初級切向畸變系數。
由于相機標定所采用的棋盤格標定板是一個平面板,將世界坐標系構造在標定板平面上,即令標定板平面為ZW=0的平面,則可將H化為3×3的齊次矩陣,其中有8個未知量,至少需要8個方程方可求解。而一對物像共軛點(Xw,Yw)與(u,v)可以提供兩個方程,故需要4對物像共軛點,便可以計算出世界坐標平面到圖像坐標平面的單應性矩陣H,因此每幅棋盤格標定板至少需要提供4個有用的物點,即角點。通過數學計算后得到內參數矩陣M1與單應性矩陣中列向量h1、h2之間的關系:
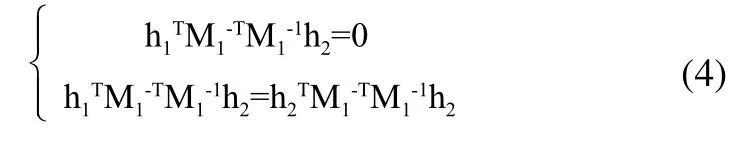
式中,h1、h2已知,而M1中含有5個未知量,因此至少需要3個不同的單應性矩陣產生6個方程來求解內參數矩陣。而外參數矩陣M2可由單應性矩陣與內參數矩陣M1求得。
以上分析表明,理論上,單相機內參數和外參數的標定至少需要拍攝3幅不同方位的棋盤格圖像。但由于實際采集的圖像不可避免存在噪聲,為了得到高質量結果,一般需要采集多于10幅不同方位的7×8或者更大棋盤格的圖像,再通過最大似然估計對得到的結果進行優化,以提高標定精度。
在獲得M1和M2的標定結果后,由式(2)求得沒有畸變時圖像物理坐標(x,y),然后將拍攝的n幅圖像每幅取m個角點,可以構成n·m個如式(3)所示的方程組。利用最小二乘法可求得畸變系數k1、k2、p1。最后,建立如式(5)所示的目標函數,通過Levenberg-Marquarat算法進行優化,得到優化的畸變系數。

式中,mij表示第i幅圖像上的第j個角點的像點坐標,m'(M1,k1,k2,p1,Ri,Ti,Mj)表示加入畸變系數k1、k2、p1后,第i幅圖像上的第j個角點的世界坐標Wj通過Ri的旋轉與Ti平移后得到的像點坐標。利用同一個標定板同時對兩個相機進行標定,分別得到二者相對同一坐標系的旋轉矩陣和平移向量這一過程就是雙目標定的過程。本文設定左相機坐標系為參考坐標系,用R、T表示右相機相對于左相機的旋轉矩陣和平移向量,則有:

式中,Rl、Tl、Rr、Tr分別為世界坐標系中一點相對于左、右相機的旋轉矩陣與平移向量,通過單相機標定獲得。由于圖像采集過程中噪聲的存在,利用兩個相機同時拍攝標定板后,采集的每一組圖像對計算得到的R、T都會有一定偏差,為使計算得到的R、T值更加準確,可通過Levenberg-Marquardt算法,取所有圖像對中計算得到的R、T的中值來作為初始近似值進行非線性優化,得到準確的結果。
3 Bouguet立體校正方法
由于實際的雙目測量系統不可避免地存在結構參數誤差及相機自身參數誤差,因此左、右兩相機同時獲取的同一目標的兩幅圖像一般是非共面、非行對齊。立體校正的目的就是將這兩幅圖像校正成共面、且行對齊,以便于后續特征匹配與測距[11]。Bouguet算法利用標定得到的相機內外參數,首先對圖像進行畸變校正,使得左右兩幅圖像投影畸變達到最小,實現圖像觀測面積最大化。然后,將選擇矩陣R分成兩個對等的矩陣,使兩幅圖像均旋轉一半,達到兩幅圖像在同一個成像面上的效果。最后,結合平移矩陣T使得同一成像平面上的左右兩幅圖像極線平移成同一行,并且與基線平行[10]。Bouguet校正算法正是利用相機內、外參數以及畸變系數的標定結果進行立體校正,如圖4所示。
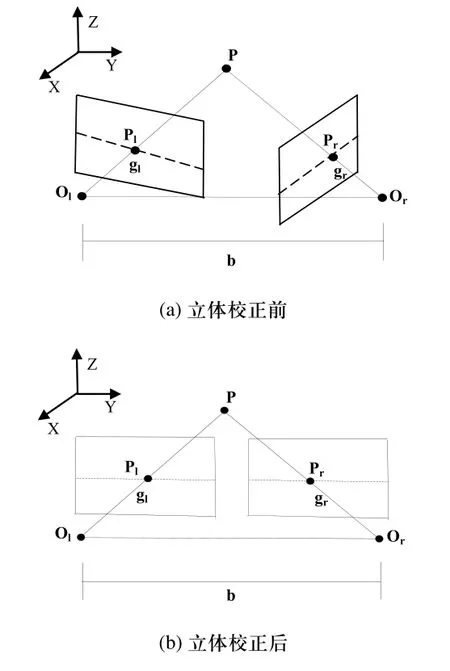
圖4 Bouguet立體校正示意圖
4 標定實驗及結果評價
4.1 雙目測量實驗系統的組成
雙目測量系統及其標定實驗如圖5所示。該系統由兩個FC-IU320C-6型工業相機組成,鏡頭為FUJINON HF25HA-1B定焦鏡頭,焦距f=25mm,分辨率為2048×1536,像元大小為3.2μm×3.2μm。兩個相機分別安裝在兩個“球型云臺+板型云臺”的組合云臺上。兩個組合云臺分別固定在底座(由100mm×48 mm×5.3mm槽鋼制作)的兩端。球型云臺和板型云臺均帶有調節刻度,方便調節兩相機成像平面的中心距2L,使其約等于高速鐵路兩根鋼軌軌距。標定所用的平面棋盤格為自制,格數8×6,每格的尺寸為80mm×80 mm,用A1圖紙打印,粘貼在A0繪圖板上。

圖5 雙目測量系統標定實驗場景圖
4.2 標定實驗及其結果分析
標定板放置在一個可旋轉、可升降、帶滾輪的座椅上,便于調整距離和轉動不同方向。本實驗采集20對(對于同一標定板位置,左、右相機各采集一幅圖像為一對)不同方位下的棋盤格標定板圖像。標定軟件是在Visual Studio 2010開發環境下,利用C++自主設計開發,程序界面如圖6所示。圖中“左相機”下方輸出3×3矩陣即為左相機內參數矩陣,矩陣中的元素與式(2)中各內參數相對應,例如u0為1023.982,v0為768.033。同理,圖中“右相機”下方輸出3×3矩陣即為右相機的內參數矩陣。圖中“雙目標定”下方輸出的是右相機相對于左相機的相對位置關系。
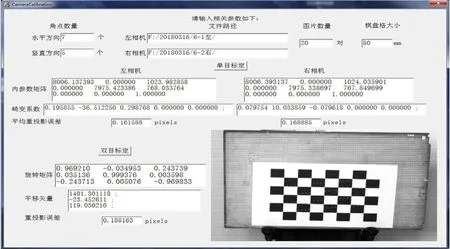
圖6 雙目系統標定程序界面
標定結果分析:
由圖6標定結果,計算左相機焦距f1與右相機焦距f2,得焦距f1=8006.137×3.2×10-3≈25.6196mm,f2=8006.393×3.2×10-3≈25.6205mm,即二者偏差很小,但均不等于標稱值25mm。左相機光軸與其圖像平面的交點為(1023.982,768.033),右相機光軸與其圖像平面的交點為(1024.035,767.849),兩相機的主點幾乎在圖像平面中心(1024,768)處。標定結果中畸變系數順序為k1、k2、p1、p2、k3,由于不考慮p2、k3,故二者均為0,兩個相機的畸變系數k1、p1均較小,k2稍大一些,說明有一定徑向畸變,而切向畸變很小,可以忽略。一般平均重投影誤差小于0.2個像素即可認為標定結果不錯,左相機平均重投影誤差為0.161313個像素,右相機平均重投影誤差為0.168885個像素,均小于0.2個像素,說明標定結果良好。
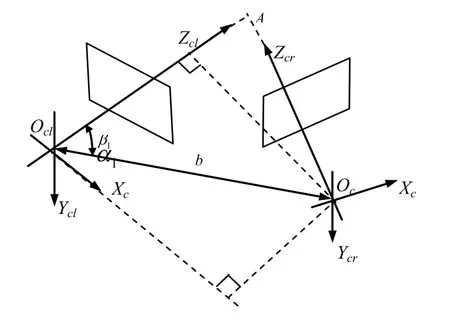
圖7 光心距離與光軸傾斜角求解示意圖
由圖6右相機相對于左相機的位置關系,可進一步求解相機光軸傾角與光心距離,原理圖如圖7所示。
式中β1為左相機光軸傾斜角的余角,由式(7)可以求得β1為85.0018°,則左相機光軸的傾斜角為α1=90°-β1=4.998°,同理,知道左相機相對于右相機的位置關系后求得右相機光軸傾角為α2=4.978°;由式(7)可以求得兩個相機光心之間的距離為b=1406.65mm。以上求出的值,與實驗中設定(通過仔細調節實驗裝置來設定,肯定有誤差)的兩個相機光軸傾角為5°和兩個相機光心距離為1405mm非常接近,表明標定結果良好。
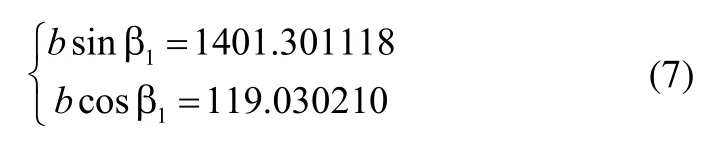
4.3 Bouguet立體校正
在完成雙目測量系統標定后,利用所得到的標定結果進行Bouguet立體校正。校正程序也是在Visual Studio 2010開發環境下,利用C++自主設計開發。通過對左、右相機拍攝的一個圖像對進行處理,得到圖8所示的校正結果。由圖可見,校正前左、右圖像非共面且行不對齊;校正后,兩幅圖像實現了良好的共面與行對齊,證明了標定結果的準確性。
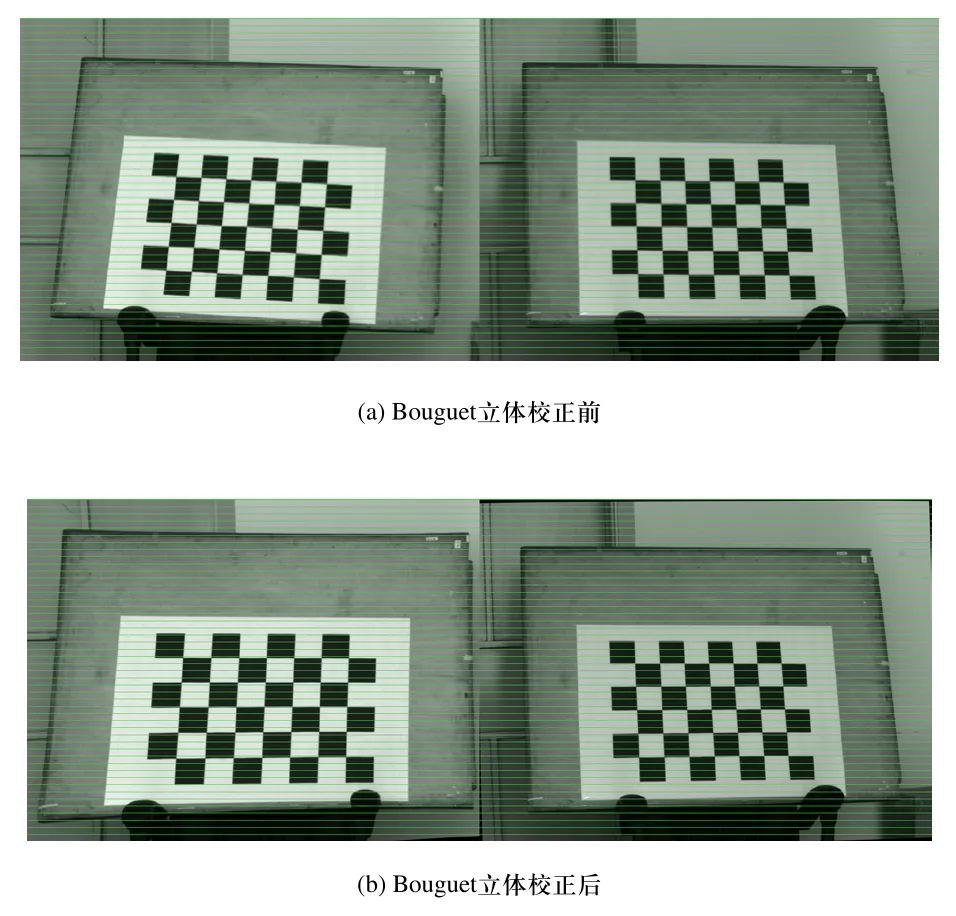
圖8 Bouguet立體校正結果圖
5 結論
本文對接觸線雙目視覺測量系統的標定與立體校正問題進行了分析研究,結果表明:1)針對本文涉及的高鐵接觸線檢測應用,采用張正友的平面模板兩步法進行相機的內、外參數標定,左、右兩相機的平均重投影誤差均小于0.2個像素,達到了比較理想的標定精度。Bouguet立體校正所得到的結果也充分驗證了這一點。因為Bouguet立體校正是在標定結果的基礎上進行的,標定結果的誤差將直接導致Bouguet立體校正結果不理想。2)相機鏡頭的徑向畸變遠大于切向畸變,后者通常可以忽略。3)文中的標定與校正方法及所開發的雙目測量系統標定與立體校正軟件可推廣應用到類似的雙目測量系統。
