系泊多浮體耦合系統水動力特性數值分析
2019-03-30 02:52:44張斐斐
艦船科學技術 2019年3期
關鍵詞:系統
李 鴻,張斐斐,李 莉,秦 超
(1. 哈爾濱工程大學 航天與建筑工程學院,黑龍江 哈爾濱 150001;2. 哈爾濱工程大學 材料科學與化學工程學院,黑龍江 哈爾濱 150001)
0 引 言
各類碼頭的建成、海上運輸的高速發展和我國領海海域的保護,使系泊多浮體系統得到廣泛應用。針對橋梁的非通航孔設計了各類浮式防船撞設施,避免因橋墩受到船舶撞擊而帶來嚴重的人員傷亡和經濟損失。在各類危險品碼頭也逐漸發展了浮體系泊式防撞系統,用于攔截由于惡劣環境或船舶機械故障引起的意外事故,保護碼頭的同時也避免了災難性的海上污染。
沈慶[1–2]采用勢流理論計算了規則波作用下的單系泊浮體受到的流體壓力,使用Huston方法和Kane方程提出了用于求解多浮體系統中浮體質心位移和角位移的復數線性代數方程組。王翔[3]采用三維頻域函數法得出波頻和浪向對浮體的運動響應和錨纜張力產生很大的影響,且在低頻范圍內出現極值。王桂波[4]通過模態法研究了受到規則波作用的鉸接多浮體結構頻域運動響應,發現浮體的運動響應受到水深、鉸接位置和波浪周期的影響。袁培銀[5]對深海半潛式多浮體新型系泊系統進行了時域分析,新型設計可以在一定程度上改善平臺的運動響應,滿足系泊纜的安全要求,在鉆井作業時保證平臺的安全性。高峰[6]采用物理模型研究了多船過駁平臺的系泊特性,試驗得到各浮體在風浪流作用下的運動量,并測試了系泊纜張力的變化。于文太[7]使用Matlab-GUI開發的計算軟件,分析了多浮筒懸鏈線系泊纜索姿態曲線的影響因素。王貝殼[8]提出了適用于非通航孔橋墩的防船撞攔截網裝置,對比AQWA數值模擬結果與試驗結果,驗證了攔截網工程設計的有效性。夏雪[9]提出了小水線面浮式攔截系泊體系,結合物理模型試驗和數值模擬,驗證了該系統在深水海域具有更好的適應性。張周康[10–11]使用計算流體力學軟件和多剛體動力學理論,通過嵌套網格方法、VOF方法對斜浪作用下的浮體系統進行了運動響應的模擬分析,對比實驗結果驗證了數值模擬方法的正確性。在海洋動力環境要素作用下,王鑫[12]采用物理模型試驗方法,對系泊浮筒的運動響應和系泊纜的動力響應進行研究。
系泊浮筒鏈防撞系統為多浮體耦合結構,涉及多浮體運動響應和和系泊纜繩張力問題,具有對各種海上建筑適應性強、成本低廉、易于施工修理等特點,但是由于各浮體之間存在結構和水動力的耦合作用,運動和動力響應與單浮體系統有明顯不同,對其水動力特性缺乏系統研究,這在一定程度上限制了該系統的應用。因此,本文使用AQWA軟件,在物理模型試驗的基礎上建立系泊多浮體耦合系統的水動力模型,對不同海洋環境下的多浮體系統,采用全耦合時域分析方法,進行浮體運動響應和系泊纜繩動力響應的數值計算,得到浮體橫移量和系泊纜繩張力的數值解,并與物理模型試驗的結果進行對比分析。
1 多浮體耦合系統
多個浮體相互連接組成系泊多浮體系統,多浮體系統的形式多種多樣,海上浮式移動平臺FPSO、樁群結構以及系泊防撞系統等,本文選取系泊浮筒鏈式防撞系統[12]進行系泊多浮體耦合系統的全耦合時域分析。
1.1 系泊浮筒鏈系統模型
浮筒直徑 4 m,長 18 m,質量為 80 kg,每個浮筒分布有4條系泊纜,浮筒間纜繩長5 m,浮筒鏈總長度為552 m,水深48 m,浮筒和纜繩的布置以及纜繩編號如圖1所示。
1.2 系泊纜繩參數

圖 1 系泊多浮體耦合系統布置圖Fig. 1 Arrangement of mooring multi-body coupled system
采用線性纜繩,王鑫[12]在物理模型試驗中采用的纜繩受力變形曲線如圖2所示,使用Matlab將試驗中的纜繩受力變形曲線擬合成下列函數:


圖 2 纜繩受力變形曲線Fig. 2 Force-deformation curve of cable
1.3 系泊浮筒鏈系統水動力模型的建立
采用AQWA軟件,在物理模型試驗的基礎上建立系泊系統的水動力模型,如圖3所示。

圖 3 系泊系統水動力模型Fig. 3 The hydrodynamic model of mooring system
2 海洋環境動力要素
2.1 波浪譜
采用不規則波JONSWAP譜進行數值模擬,其表達式為[13]:


表 1 波浪要素Tab. 1 Wave parameters
2.2 海流參數
海流速度隨時間變化緩慢,因此在工程設計中,為簡化起見,海流被當作穩定的流動,垂線流速分布公式如下所示:

3 結果與分析
考慮單純波浪和波流共同作用的不同海洋環境,利用AQWA軟件對系泊浮筒鏈系統采用全耦合時域分析方法,進行浮體運動響應和系泊纜動力響應的數值計算。浮體在波浪載荷作用下,隨著波浪方向發生位移響應,當波浪或水流進一步在浮體周圍形成繞射水流后,浮體隨著繞流的不對稱性會沿著系統軸線發生蛇形擺動,浮體之間會產生相互干擾,由于系泊纜的約束作用,浮體系統的運動主要表現為橫向運動,為了驗證數值模擬方法的可靠性和精確度,選取物理模型的實測波要素和水流速度,采用全耦合時域分析方法對系泊多浮體耦合系統進行了數值計算。
3.1 單純波浪作用下系統的運動響應和動力響應
對系泊纜繩施加40 kN的預張力,浮筒之間的連接纜繩不施加預張力,在不同有義波高和譜峰周期的單純波浪作用下,全耦合時域計算時間設置為600 s。在有義波高為0.85 m的單純波浪作用下,系泊浮筒鏈系統的浮體橫向運動時間歷程曲線如圖4所示,纜繩張力時間歷程曲線如圖5所示。

圖 4 浮筒橫向運動時域曲線Fig. 4 Time domain curve of buoy lateral motion

圖 5 纜繩張力時域曲線Fig. 5 Time domain curve of cable tension
觀察圖4可知在0.85 m有義波高的單純波浪作用下,浮筒沿著軸線做往復運動,最大橫向位移出現在200 s附近,達到 1.17 m,橫向位移的平均值為 0.17 m,表明浮筒基本可以回到初始位置。由圖5(a)可知:浮筒前后往復運動的同時也在隨著波峰和波谷上下運動,出現端部系泊纜張力小于預應力的情況,浮筒在前后往復運動時,端部系泊纜的張力隨著浮筒橫向運動分量的增大而增大,最大值為152.3 kN。由于浮筒鏈隨著不對稱繞流發生蛇形擺動,在端部系泊纜的約束和各浮筒之間的耦合作用下,中間浮筒的橫向位移最大,導致中間浮筒兩端的纜繩張力比其他浮筒間纜繩張力大,圖5(b)和圖5(c)描述了2號和3號纜繩張力的時域曲線,最大值分別為141.6 kN和133.3 kN。觀察圖5(d)~圖5(g)發現:中間浮筒迎浪側的4號和5號系泊纜張力的最大值為54 kN和56 kN,6號系泊纜的最大值為51 kN,由于浮筒鏈向后運動的最大位移為0.85,所以背浪側纜繩的最大張力相對較小,為46.7 kN,在保證不走錨的情況下,要重點關注中部位置浮筒迎浪側的系泊纜張力。結合圖4和圖5發現:纜繩的最大張力與最大橫向位移均出現在200~250 s之間。
不同波浪作用下浮筒橫移量的試驗和數值模擬結果見表2,試驗和數值模擬得到的系泊纜張力見表3。
分析可知:采用全耦合時域分析模擬得到的浮筒橫向運動分量的最大值與模型試驗得到的結果較為接近,浮筒間纜繩張力的試驗值和模擬值也普遍較為接近。物理試驗中安裝了21個浮筒,為了節省計算時間,水動力模型只選取了中間位置的7個浮筒,通過增大端部系泊纜的長度代替減少的浮筒數量,從而使水動力模型和物理試驗模型的跨度保持一致,這也導致水動力模型系統的穩定性降低。全耦合時域分析得到的背浪方向浮筒橫向運動分量的平均值普遍大于模型試驗的平均值,這是由于水動力模型系統的穩定性沒有物理模型試驗的穩定性好,導致逃逸波浪和50年重現期波浪作用時背浪方向浮筒位移最大值時域分析與試驗結果相差較大,迎浪側5號纜繩張力時域分析最大值與試驗最大值也相差較大。
3.2 波流共同作用下系統的運動響應和動力響應
考慮到允許工程船舶作業的海洋環境,且當地海流流速不會超過1.2 m/s[12],因此只考慮1.2 m/s的海流和2種作業波浪的共同作用下,對系泊浮筒鏈進行600 s的全耦合時域計算,系泊浮筒鏈系統的浮體橫向運動時間歷程曲線如圖6所示,浮筒橫向運動分量最大值的實驗和模擬對比如表4所示,在50年重現期波浪的作用下,纜繩張力最大值的實驗和模擬對比如表5所示。
觀察圖6可知:在波浪和水流的耦合作用下,浮筒發生前后擺動,在水流的沖擊作用下沿水流前進方向運動量較大,而且不能回到初始位置;結合表4得到,浮筒橫向位移的全耦合時域分析最大值與模型試驗最大值較為接近,可以較為準確的模擬出浮筒在波流共同作用時橫向位移的最大值,但是數值計算最小值和平均值大于物理模型試驗平均值,這是由于水動力模型系統的穩定性沒有物理模型試驗的穩定性好,導致數值計算高估了系統橫向運動分量的最小值和平均值。表5給出了系泊浮筒最大纜繩張力的匯總,出現在50年重現期波浪和1.2 m/s的海流同時作用下,依然是端部纜繩的張力最大,為755.6 kN,可以為錨固塊體重量的設計提供參考依據。
4 結 語
本文采用全耦合時域分析方法,通過AQWA軟件對浮筒鏈式系泊多浮體耦合系統進行了運動和動力響應數值模擬,并與現有物理模型試驗進行了對比分析,得到下列結論:

表 2 單純波浪作用下,中間浮筒橫向運動分量最大值的試驗和模擬對比Tab. 2 Experimental and simulation comparisons of the maximum lateral motion component of middle buoy (only wave)

表 3 單純波浪作用下,纜繩張力最大值的試驗和模擬對比Tab. 3 Experimental and simulation comparisons of the maximum tension of cable (only wave)
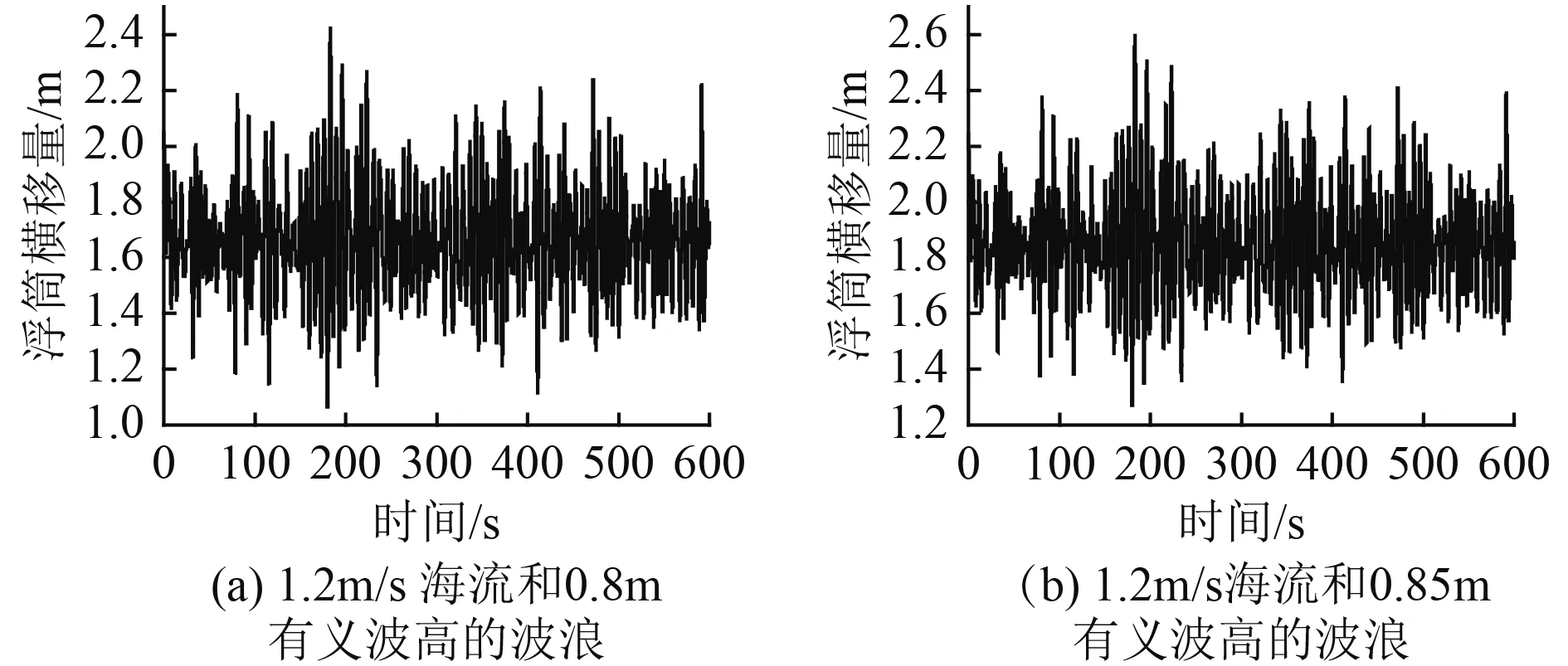
圖 6 波流共同作用下,浮筒橫向運動時域曲線Fig. 6 Time domain curve of buoy lateral motion(wave+1.2 m/s current)

表 4 波流共同作用下,浮筒橫向運動分量最大值的的實驗和模擬對比Tab. 4 Experimental and simulation comparisons of the maximum lateral motion component of middle buoy(wave+1.2 m/s current)

表 5 波流共同作用下,纜繩張力最大值的實驗和模擬對比Tab. 5 Experimental and simulation comparisons of the maximum tension of cable (wave+1.2 m/s current)
1)在給定海洋動力要素的情況下,浮體橫向位移的全耦合時域分析結果與模型試驗結果較為接近,浮筒間纜繩張力的試驗值和模擬值普遍較為接近。
2)由于水動力模型系統的穩定性沒有物理模型試驗的穩定性好,導致數值計算高估系統橫向運動分量的最小值和平均值。
3)通過全耦合時域分析結果與物理模型試驗結果的對比,分析了影響數值模擬結果與物理模型試驗結果產生誤差的原因,驗證了全耦合時域分析方法的正確性,對系泊多浮體耦合系統的運動和動力響應的計算具有較好的精確度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32