組網(wǎng)雷達(dá)分布式協(xié)同干擾仿真研究
2019-04-01 06:26:36楊會(huì)軍
航天電子對(duì)抗 2019年1期
楊會(huì)軍,李 強(qiáng)
(中國(guó)航天科工集團(tuán)8511研究所,江蘇 南京 210007)
0 引言
雷達(dá)網(wǎng)[1]把多部不同工作模式、不同頻段、不同極化方式、不同體制的雷達(dá)適當(dāng)布站,利用通信手段鏈接成網(wǎng),由中心站統(tǒng)一調(diào)配而形成一個(gè)有機(jī)的整體,在戰(zhàn)場(chǎng)上構(gòu)成全方位、立體化、多層次的戰(zhàn)斗體系,具有很強(qiáng)的生存能力和抗干擾能力。
本文針對(duì)組網(wǎng)雷達(dá)工作特點(diǎn)研究分布式協(xié)同干擾技術(shù),基于分布式協(xié)同干擾仿真評(píng)估軟件開(kāi)展仿真研究,建立了組網(wǎng)雷達(dá)對(duì)抗數(shù)字仿真系統(tǒng),可實(shí)現(xiàn)組網(wǎng)雷達(dá)功能級(jí)干擾仿真研究。
1 雷達(dá)組網(wǎng)方式
1.1 數(shù)據(jù)融合結(jié)構(gòu)
組網(wǎng)雷達(dá)數(shù)據(jù)融合結(jié)構(gòu)包括集中式融合、分布式融合和混合式融合三種。
1)集中式融合結(jié)構(gòu)
集中式數(shù)據(jù)融合結(jié)構(gòu)將各節(jié)點(diǎn)雷達(dá)檢測(cè)到的目標(biāo)量測(cè)值傳遞到融合中心,在融合中心進(jìn)行數(shù)據(jù)對(duì)準(zhǔn)、點(diǎn)跡相關(guān)、數(shù)據(jù)關(guān)聯(lián)、航跡濾波、預(yù)測(cè)與綜合跟蹤。
2)分布式融合結(jié)構(gòu)
分布式數(shù)據(jù)融合結(jié)構(gòu)的每個(gè)節(jié)點(diǎn)雷達(dá)對(duì)其數(shù)據(jù)進(jìn)行處理,產(chǎn)生局部多目標(biāo)跟蹤航跡,然后把跟蹤結(jié)果及估計(jì)數(shù)據(jù)送至融合中心,中心根據(jù)各節(jié)點(diǎn)雷達(dá)的航跡數(shù)據(jù)完成航跡關(guān)聯(lián)和航跡融合,形成全局估計(jì)。
3)混合式融合結(jié)構(gòu)
混合式融合結(jié)構(gòu)同時(shí)傳輸探測(cè)到的點(diǎn)跡信息和經(jīng)過(guò)局部節(jié)點(diǎn)處理過(guò)的航跡信息,一般在大型融合系統(tǒng)中運(yùn)用。
組網(wǎng)雷達(dá)融合結(jié)構(gòu)性能比較見(jiàn)表1。其中,集中式融合結(jié)構(gòu)估計(jì)精度高,但需要較大的通信帶寬,同時(shí)計(jì)算量大,可靠性低;分布式融合結(jié)構(gòu)對(duì)通信帶寬要求不高、計(jì)算速度快、可靠性高,但聯(lián)合估計(jì)和跟蹤精度低于集中式融合結(jié)構(gòu);混合式是集中式和分布式的組合。

表1 組網(wǎng)雷達(dá)融合結(jié)構(gòu)性能比較
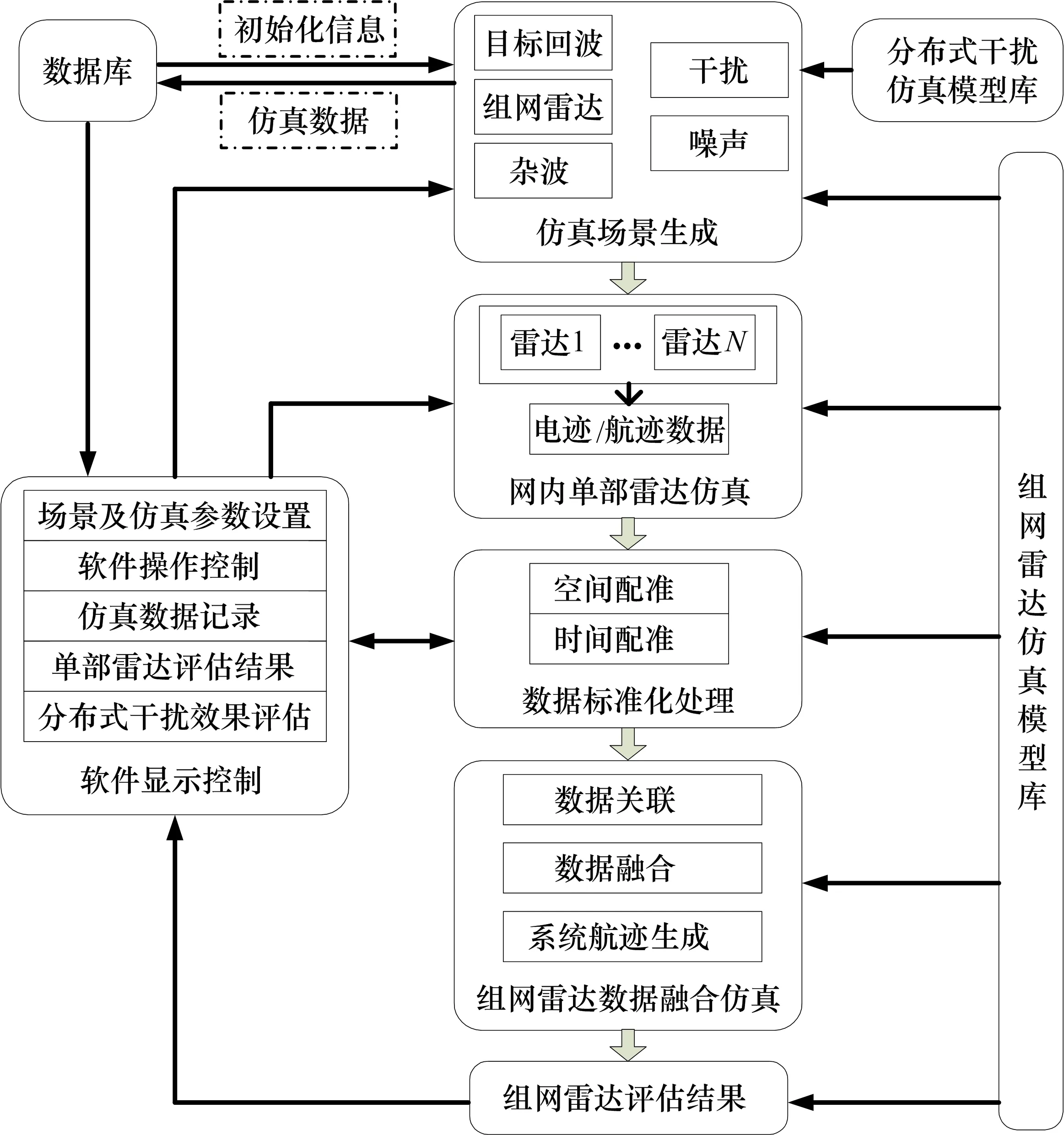
圖1 組網(wǎng)雷達(dá)仿真系統(tǒng)構(gòu)成
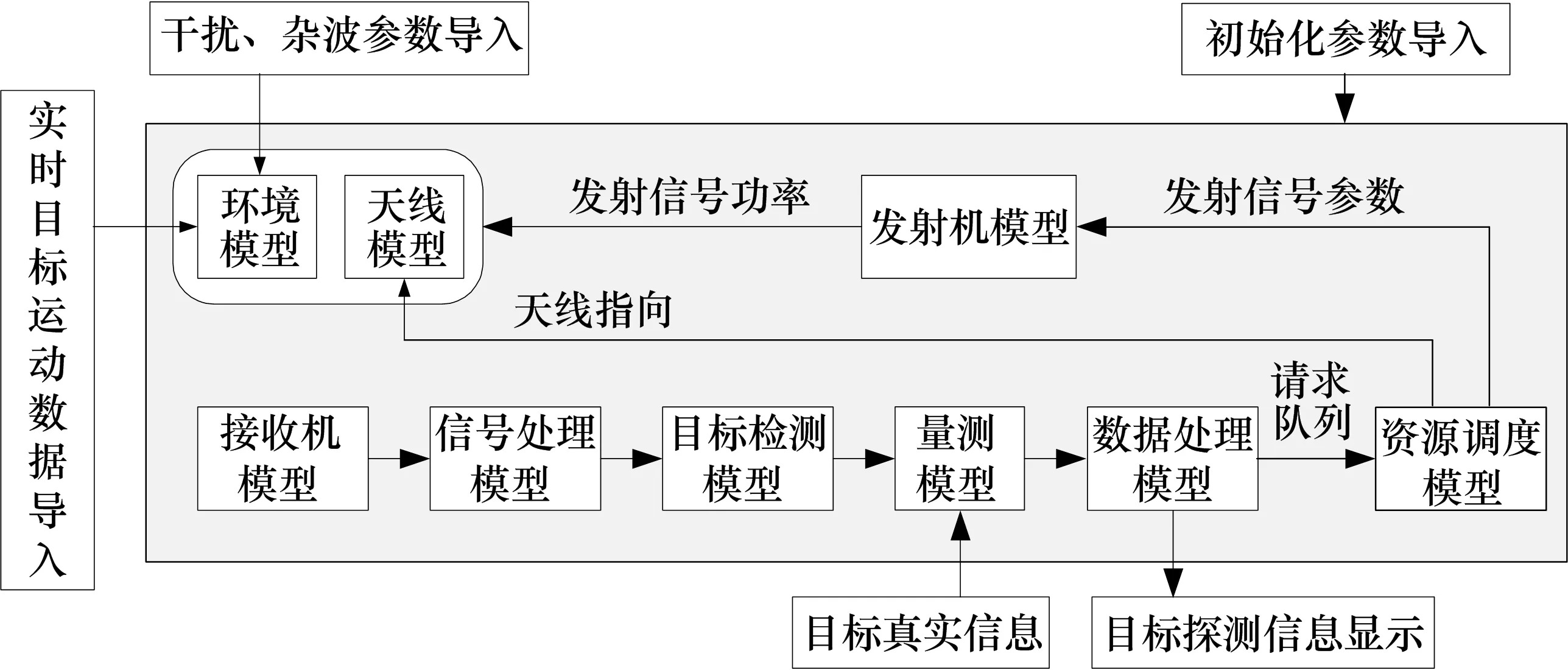
圖2 單部雷達(dá)功能級(jí)仿真系統(tǒng)組成框圖
1.2 數(shù)據(jù)關(guān)聯(lián)算法
組網(wǎng)雷達(dá)數(shù)據(jù)關(guān)聯(lián)是確定雷達(dá)接收到的量測(cè)信息和目標(biāo)源對(duì)應(yīng)關(guān)系的過(guò)程,涉及到三類關(guān)聯(lián)問(wèn)題:點(diǎn)跡-點(diǎn)跡關(guān)聯(lián)、點(diǎn)跡-航跡關(guān)聯(lián)和航跡-航跡關(guān)聯(lián)。
1)點(diǎn)跡-點(diǎn)跡關(guān)聯(lián)
通過(guò)在多個(gè)采樣周期之間進(jìn)行點(diǎn)跡-點(diǎn)跡關(guān)聯(lián),可以為新目標(biāo)建立起始航跡提供初始化信息。新目標(biāo)航跡起始應(yīng)用于集中式融合結(jié)構(gòu)的融合中心、分布式融合結(jié)構(gòu)中的各節(jié)點(diǎn)雷達(dá)。在集中式融合結(jié)構(gòu)中,在對(duì)點(diǎn)跡融合之前也需要進(jìn)行“點(diǎn)跡-點(diǎn)跡”關(guān)聯(lián),以確定哪些點(diǎn)跡源于同一個(gè)探測(cè)目標(biāo)。
2)點(diǎn)跡-航跡關(guān)聯(lián)
為了更新航跡,維持跟蹤的連續(xù)性,需要進(jìn)行點(diǎn)跡-航跡關(guān)聯(lián)以確定用于航跡修正的新觀測(cè)數(shù)據(jù)。持續(xù)跟蹤的過(guò)程同時(shí)存在于集中式融合結(jié)構(gòu)的融合中心和分布式融合結(jié)構(gòu)中的各節(jié)點(diǎn)雷達(dá)中。
3)航跡-航跡關(guān)聯(lián)
在分布式融合結(jié)構(gòu)中,為了對(duì)由多部節(jié)點(diǎn)雷達(dá)輸出的多目標(biāo)航跡數(shù)據(jù)進(jìn)行融合,首先需要進(jìn)行航跡-航跡數(shù)據(jù)關(guān)聯(lián),以確定哪些局部航跡源于同一個(gè)被跟蹤的目標(biāo)。
2 組網(wǎng)雷達(dá)數(shù)字仿真系統(tǒng)
2.1 組網(wǎng)雷達(dá)仿真系統(tǒng)組成
組網(wǎng)雷達(dá)仿真系統(tǒng)包括系統(tǒng)仿真模型庫(kù)、仿真場(chǎng)景生成、顯示控制三個(gè)部分,如圖1所示。
2.2 單部雷達(dá)仿真系統(tǒng)模型
網(wǎng)內(nèi)單部雷達(dá)功能級(jí)仿真系統(tǒng)的組成框圖如圖2所示。其完成的主要功能是接收外部系統(tǒng)傳入的雷達(dá)初始化參數(shù),以及外部其它系統(tǒng)導(dǎo)入的實(shí)時(shí)信息數(shù)據(jù),還有目標(biāo)的先驗(yàn)信息、干擾信息數(shù)據(jù),進(jìn)而仿真功能級(jí)的目標(biāo)檢測(cè)、搜索、多目標(biāo)跟蹤以及波束調(diào)度等功能。
2.3 組網(wǎng)雷達(dá)融合中心仿真系統(tǒng)模型
2.3.1數(shù)據(jù)標(biāo)準(zhǔn)化處理
在組網(wǎng)雷達(dá)信息融合系統(tǒng)中,各站雷達(dá)數(shù)據(jù)由各站分別獲得。因而指揮中心所接收的遠(yuǎn)方目標(biāo)情報(bào)受到指揮中心地理位置、工作時(shí)空的影響,具有時(shí)空相對(duì)性。對(duì)于一個(gè)雷達(dá)網(wǎng)系統(tǒng)而言,首先是單個(gè)雷達(dá)在各自的時(shí)間和空間系統(tǒng)內(nèi)進(jìn)行測(cè)量然后對(duì)各自的測(cè)量結(jié)果進(jìn)行時(shí)間配準(zhǔn)和空間配準(zhǔn),只有在統(tǒng)一的時(shí)間和坐標(biāo)系統(tǒng)內(nèi)才能進(jìn)行多傳感器的融合。
2.3.2數(shù)據(jù)融合模型
根據(jù)需求采用合適的融合結(jié)構(gòu):若各節(jié)點(diǎn)雷達(dá)工作在遠(yuǎn)程搜索模式,只能采用集中式融合結(jié)構(gòu);若雷達(dá)工作在中遠(yuǎn)程跟蹤模式或中近程搜索跟蹤模式,可工作在任意一種融合結(jié)構(gòu)下;若組網(wǎng)雷達(dá)內(nèi)各節(jié)點(diǎn)雷達(dá)工作在不同工作方式下,融合中心采用混合式融合結(jié)構(gòu),滿足各雷達(dá)不同的融合需求。
2.4 組網(wǎng)雷達(dá)干擾模型
組網(wǎng)雷達(dá)干擾方式包括分布式噪聲壓制干擾、 密集假目標(biāo)干擾、多假目標(biāo)航跡擾亂干擾、分布式協(xié)同虛假航跡欺騙干擾、多點(diǎn)源相參干擾等。
1)分布式噪聲壓制干擾[1]
為了掩護(hù)某特定區(qū)域的目標(biāo)或在某一地區(qū)內(nèi)制造假的進(jìn)攻態(tài)勢(shì),將眾多體積小、質(zhì)量輕、價(jià)格便宜的小型電子干擾機(jī)散布在接近被干擾目標(biāo)的空域上,自動(dòng)或受控地對(duì)選定的軍事電子設(shè)備進(jìn)行干擾。
2)密集假目標(biāo)干擾
密集假目標(biāo)干擾是指干擾機(jī)產(chǎn)生數(shù)量眾多的與雷達(dá)發(fā)射信號(hào)相同(或相似)的干擾信號(hào),使得組網(wǎng)雷達(dá)數(shù)據(jù)處理系統(tǒng)運(yùn)算量加劇甚至過(guò)載,以期達(dá)到延緩數(shù)據(jù)處理速度、飽和跟蹤能力和多航跡起始的目的。當(dāng)組網(wǎng)雷達(dá)處在對(duì)目標(biāo)跟蹤起始階段,可以使用密集假目標(biāo)干擾。
3)多假目標(biāo)航跡擾亂干擾
多假目標(biāo)航跡擾亂干擾是指在雷達(dá)跟蹤波門內(nèi)產(chǎn)生一定數(shù)量的高逼真度假目標(biāo),使得雷達(dá)在進(jìn)行點(diǎn)跡-航跡關(guān)聯(lián)時(shí)出現(xiàn)關(guān)聯(lián)錯(cuò)誤,從而破壞雷達(dá)對(duì)真實(shí)目標(biāo)的跟蹤。當(dāng)組網(wǎng)雷達(dá)已經(jīng)對(duì)目標(biāo)形成穩(wěn)定跟蹤,推薦使用航跡擾亂干擾,這樣可以使航跡關(guān)聯(lián)假目標(biāo)點(diǎn)跡混批,使跟蹤航跡變得不穩(wěn)定。
4)分布式協(xié)同虛假航跡欺騙干擾[2-4]
組網(wǎng)雷達(dá)位置已知,多部機(jī)載干擾機(jī)在系統(tǒng)控制下協(xié)同飛行,每部干擾機(jī)干擾一部雷達(dá),預(yù)先設(shè)置每部干擾機(jī)形成的虛假目標(biāo)位置,使得網(wǎng)中各部雷達(dá)探測(cè)到同一虛假目標(biāo),從而對(duì)組網(wǎng)雷達(dá)產(chǎn)生有效的航跡欺騙。
2.5 干擾評(píng)估模型
研究組網(wǎng)雷達(dá)干擾效果評(píng)估方法,建立組網(wǎng)雷達(dá)干擾效果評(píng)估指標(biāo)體系、評(píng)估準(zhǔn)則,組網(wǎng)雷達(dá)干擾效果評(píng)估指標(biāo)包括威力范圍、檢測(cè)概率、自衛(wèi)距離、欺騙概率等,建立干擾效果評(píng)估系統(tǒng)模型。基于評(píng)估結(jié)果對(duì)干擾樣式、干擾參數(shù)進(jìn)行優(yōu)化設(shè)計(jì)。
3 組網(wǎng)雷達(dá)干擾仿真
3.1 對(duì)抗場(chǎng)景
以分布式協(xié)同虛假航跡欺騙干擾為例進(jìn)行組網(wǎng)雷達(dá)干擾仿真研究。首先預(yù)設(shè)假目標(biāo)運(yùn)動(dòng)軌跡,由于各個(gè)時(shí)刻干擾機(jī)必在雷達(dá)和假目標(biāo)位置的連線上,結(jié)合假目標(biāo)和干擾機(jī)運(yùn)動(dòng)學(xué)規(guī)律,設(shè)計(jì)出每部干擾機(jī)可行的運(yùn)動(dòng)軌跡。只要設(shè)計(jì)使假目標(biāo)航跡和干擾機(jī)航跡滿足各自的運(yùn)動(dòng)學(xué)特性,這樣就可以對(duì)組網(wǎng)雷達(dá)形成一條相關(guān)的虛假航跡。對(duì)抗場(chǎng)景如圖3所示,雷達(dá)1、雷達(dá)2以集中式方式組網(wǎng)工作,戰(zhàn)機(jī)1、戰(zhàn)機(jī)2攜帶自衛(wèi)式干擾機(jī),兩部干擾機(jī)協(xié)同工作,在組網(wǎng)雷達(dá)融合中心形成穩(wěn)定逼真的假目標(biāo)航跡。
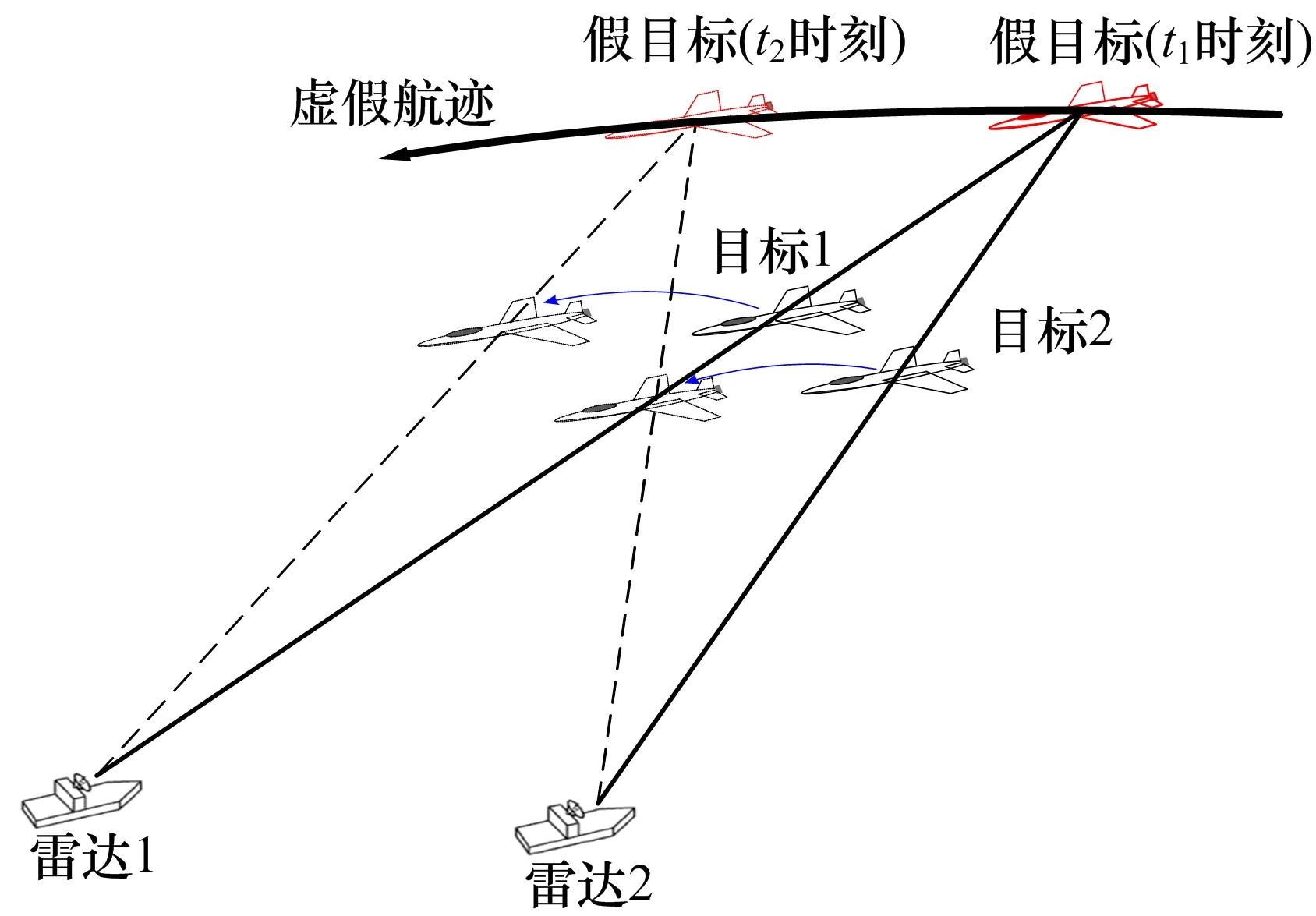
圖3 分布式協(xié)同虛假航跡欺騙干擾示意圖
3.2 參數(shù)設(shè)置
雷達(dá)1位置為(0 km,0 km,0 km),換算到經(jīng)緯高坐標(biāo)系下為(123°,30°,0 m)。雷達(dá)2位置為(0 km,100 km,0 km),換算到經(jīng)緯高坐標(biāo)系下為(123°,30.90°,787.15 m)。2部雷達(dá)同構(gòu),信號(hào)帶寬20 MHz,波束寬度1.25°。
2架目標(biāo)飛機(jī)攜帶自衛(wèi)式干擾機(jī)勻速飛行,對(duì)組網(wǎng)雷達(dá)實(shí)施虛假航跡干擾,產(chǎn)生一條初始位置為(123.7118°,30.2374°,5 km)、速度矢量為(200 m/s,100 m/s,4 m/s)的虛假航跡。
3.3 仿真結(jié)果
設(shè)干擾機(jī)1、干擾雷達(dá)1,干擾機(jī)2、干擾雷達(dá)2,2部干擾機(jī)協(xié)同工作產(chǎn)生航跡欺騙干擾。初始時(shí)延60 ms,仿真步長(zhǎng)1 s,仿真時(shí)間為1~100 s。圖4、圖5分別給出了2部雷達(dá)的探測(cè)結(jié)果。
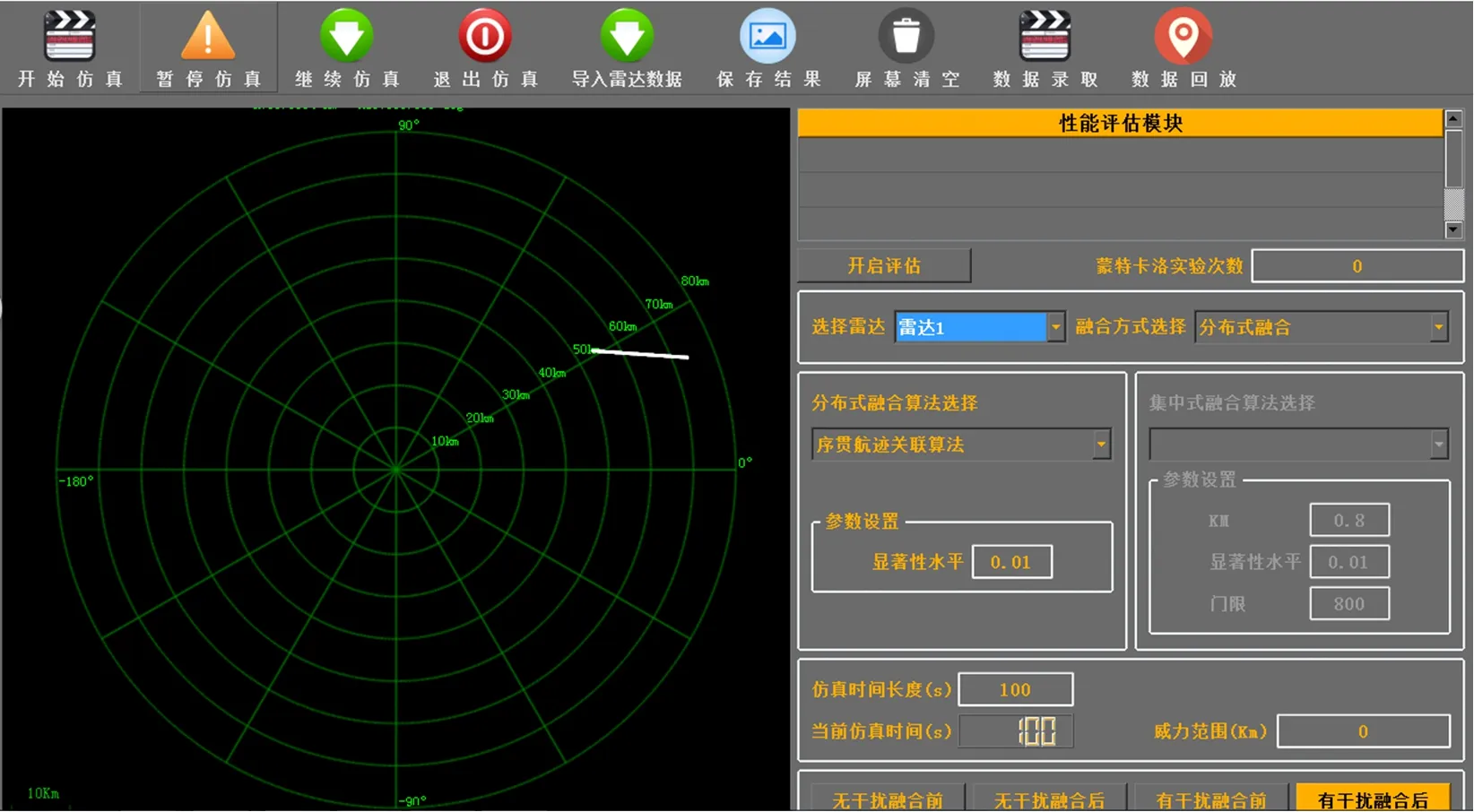
圖4 雷達(dá)1探測(cè)結(jié)果
雷達(dá)1和雷達(dá)2分別對(duì)虛假目標(biāo)進(jìn)行跟蹤,得到虛假目標(biāo)航跡。將2部雷達(dá)得到的虛假航跡傳輸?shù)綌?shù)據(jù)融合中心進(jìn)行航跡關(guān)聯(lián)檢驗(yàn),采用序貫航跡關(guān)聯(lián)算法,數(shù)據(jù)融合中心航跡關(guān)聯(lián)結(jié)果如圖6所示。由圖6可知,產(chǎn)生的虛假航跡可以通過(guò)數(shù)據(jù)融合中的航跡關(guān)聯(lián)檢驗(yàn),被誤判為真實(shí)航跡。
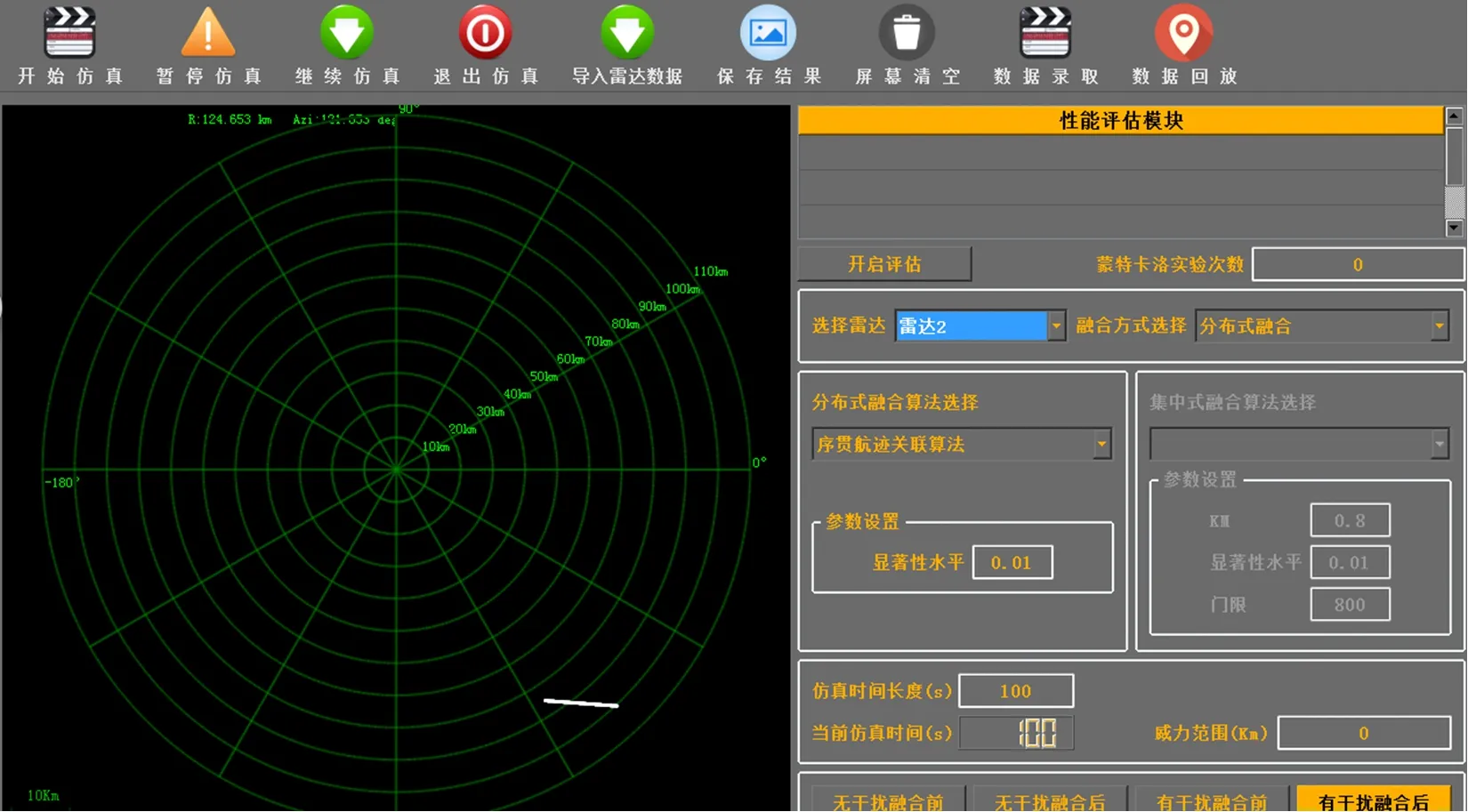
圖5 雷達(dá)2探測(cè)結(jié)果
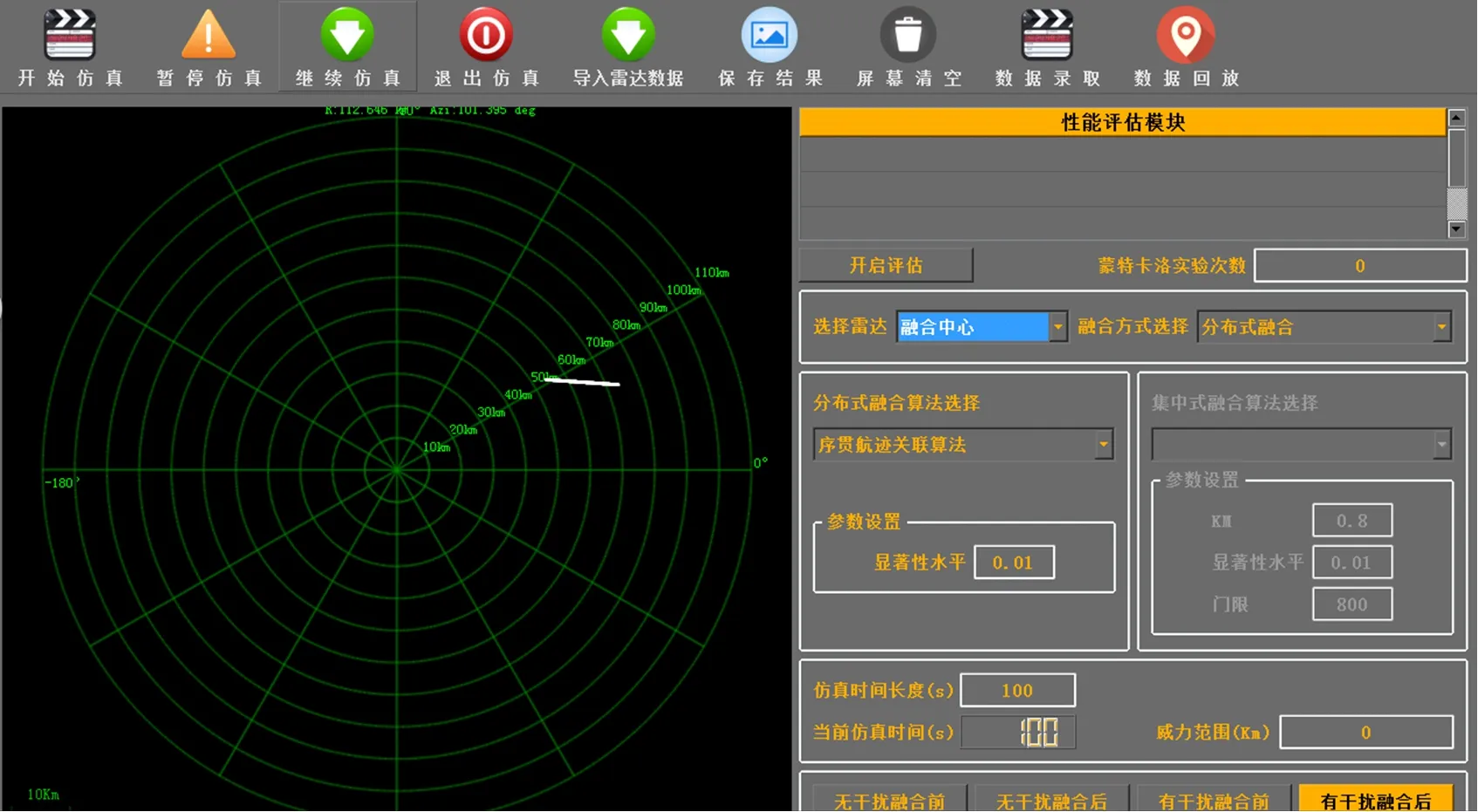
圖6 融合中心航跡關(guān)聯(lián)結(jié)果
如果干擾機(jī)獲取的雷達(dá)位置不精確,設(shè)定位誤差為500 m和700 m,干擾機(jī)對(duì)2部雷達(dá)產(chǎn)生的虛假航跡在數(shù)據(jù)融合中心進(jìn)行雙門限航跡關(guān)聯(lián)檢驗(yàn),進(jìn)行100次蒙特卡洛實(shí)驗(yàn),在500 m的定位誤差下,虛假航跡仍被誤判為真實(shí)航跡,但關(guān)聯(lián)距離進(jìn)一步變大;在700 m的定位誤差下,虛假航跡有一定的概率判斷為假航跡,被成功剔除。
因此,分布式協(xié)同虛假航跡欺騙干擾要求干擾機(jī)具有更強(qiáng)的信號(hào)分選識(shí)別、 定位以及計(jì)算處理能力,在有些情況下需要外在的信息支持,才能通過(guò)組網(wǎng)雷達(dá)融合中心的航跡關(guān)聯(lián)檢驗(yàn),產(chǎn)生欺騙干擾效果。
4 結(jié)束語(yǔ)
雷達(dá)網(wǎng)利用數(shù)據(jù)鏈或者通信網(wǎng)絡(luò),把特定區(qū)域內(nèi)的雷達(dá)鏈接成網(wǎng),具有很強(qiáng)的生存能力和抗干擾能力。本文以組網(wǎng)雷達(dá)為對(duì)抗目標(biāo),研究組網(wǎng)雷達(dá)干擾仿真技術(shù)。分析了組網(wǎng)雷達(dá)的工作方式及特點(diǎn),給出了組網(wǎng)雷達(dá)仿真系統(tǒng)的組成及模型,建立了組網(wǎng)雷達(dá)對(duì)抗數(shù)字仿真系統(tǒng),系統(tǒng)可實(shí)現(xiàn)組網(wǎng)雷達(dá)功能級(jí)干擾仿真研究。■
猜你喜歡
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
