3-RPS并聯(lián)機(jī)構(gòu)神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)控制
2019-04-02 06:01:44陳振威
中國(guó)工程機(jī)械學(xué)報(bào) 2019年1期
關(guān)鍵詞:結(jié)構(gòu)模型
王 欣,陳振威
(1.東莞職業(yè)技術(shù)學(xué)院 電子工程系,廣東 東莞 523808; 2.東莞成電金盤軟件技術(shù)有限公司 技術(shù)部,廣東 東莞 523000)
并聯(lián)機(jī)構(gòu)具有多運(yùn)動(dòng)空間維度、運(yùn)動(dòng)精度高、結(jié)構(gòu)剛度大等特點(diǎn),因而廣泛應(yīng)用于生物工程、微納制造及裝備、并聯(lián)機(jī)床等高精密領(lǐng)域[1].隨著并聯(lián)機(jī)構(gòu)宏觀控制與微觀控制技術(shù)相結(jié)合的研究不斷深入,并聯(lián)機(jī)構(gòu)的控制系統(tǒng)設(shè)計(jì)越來越受到學(xué)者們的關(guān)注,但是并聯(lián)機(jī)構(gòu)是一個(gè)高耦合、強(qiáng)非線性的多變量控制系統(tǒng),如何降低并聯(lián)機(jī)構(gòu)的軌跡跟蹤誤差逐漸成為研究的重點(diǎn)[2].文獻(xiàn)[3]基于一種空間3自由度并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型,采用自適應(yīng)反演滑模變結(jié)構(gòu)控制研究了機(jī)構(gòu)的穩(wěn)定誤差和穩(wěn)定時(shí)間.文獻(xiàn)[4]以6-PUS并聯(lián)機(jī)構(gòu)為研究對(duì)象,采用簡(jiǎn)化模型和線性反饋求解的方法,設(shè)計(jì)了一種神經(jīng)網(wǎng)絡(luò)PID控制器,對(duì)機(jī)構(gòu)的啟動(dòng)力矩、穩(wěn)態(tài)誤差和抗干擾性進(jìn)行了仿真.文獻(xiàn)[5]通過Matlab軟件建立了3-RPS并聯(lián)機(jī)構(gòu)的仿真模型,比較了PID和滑模變結(jié)構(gòu)控制器在添加干擾條件下的軌跡跟蹤誤差.文獻(xiàn)[6]提出了一種基于6自由度并聯(lián)機(jī)構(gòu)的模糊PID控制器,討論了控制系統(tǒng)的運(yùn)動(dòng)精度和動(dòng)態(tài)響應(yīng).為了降低3-RPS并聯(lián)機(jī)構(gòu)的軌跡跟蹤誤差,本文設(shè)計(jì)了一種徑向基函數(shù)(Radial Basis Function,RBF)神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)控制器,有效提高了機(jī)構(gòu)的軌跡跟蹤精度.
1 3-PRS并聯(lián)機(jī)構(gòu)模型
1.1 機(jī)構(gòu)特征
3-RPS并聯(lián)機(jī)構(gòu)主要包括對(duì)稱的3條支鏈、動(dòng)平臺(tái)和定平臺(tái)3部分結(jié)構(gòu),每一部分支鏈含有3個(gè)運(yùn)動(dòng)副,即1個(gè)轉(zhuǎn)動(dòng)副(R)、1個(gè)移動(dòng)副(P)和1個(gè)球副(S).機(jī)構(gòu)通過R副與定平臺(tái)相連接,S副與定平臺(tái)相連接,并在R副與S副間通過P副進(jìn)行串聯(lián),R副是機(jī)構(gòu)的驅(qū)動(dòng)副,為機(jī)構(gòu)提供動(dòng)力.分別在機(jī)構(gòu)定平臺(tái)等邊△abc和動(dòng)平臺(tái)等邊△ABC的中心點(diǎn),建立機(jī)構(gòu)的靜坐標(biāo)系O-XYZ和動(dòng)坐標(biāo)系o-xyz,等邊△abc和△ABC的邊長(zhǎng)分別為m和n,各桿件的長(zhǎng)度均為l,與定平臺(tái)的夾角為φi(i=1,2,3).3-RPS并聯(lián)機(jī)構(gòu)模型如圖1所示.

圖1 3-RPS并聯(lián)機(jī)構(gòu)模型Fig.1 Model of 3-RPS parallel robot
1.2 運(yùn)動(dòng)特性分析
由螺旋理論可知,研究并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)特性,首先需要分析每條支鏈對(duì)動(dòng)平臺(tái)產(chǎn)生的運(yùn)動(dòng)螺旋,并綜合分析機(jī)構(gòu)所受的約束螺旋類型,以分析出機(jī)構(gòu)的運(yùn)動(dòng)特性[7].由于3-RPS并聯(lián)機(jī)構(gòu)是對(duì)稱機(jī)構(gòu),因此,只需研究機(jī)構(gòu)的一條支鏈的約束螺旋即可.取支鏈Bb為研究對(duì)象,支鏈轉(zhuǎn)動(dòng)副B的軸線方向?yàn)槔@Y軸轉(zhuǎn)動(dòng),則轉(zhuǎn)動(dòng)副B的運(yùn)動(dòng)螺旋為
移動(dòng)副的運(yùn)動(dòng)螺旋為
球副B可以等價(jià)為3個(gè)轉(zhuǎn)動(dòng)副,假設(shè)其3個(gè)轉(zhuǎn)動(dòng)副的軸線方向分別為繞X,Y和Z軸的轉(zhuǎn)動(dòng),則球副B的運(yùn)動(dòng)螺旋為
綜上,支鏈Bb的運(yùn)動(dòng)螺旋系為
由于機(jī)構(gòu)運(yùn)動(dòng)螺旋與約束螺旋的互易積為0,可得機(jī)構(gòu)的約束螺旋系為
(1)
根據(jù)式(1)和并聯(lián)機(jī)構(gòu)的對(duì)稱性可得,機(jī)構(gòu)動(dòng)平臺(tái)總共受到3個(gè)約束力的作用,方向與對(duì)應(yīng)基面上轉(zhuǎn)動(dòng)副的軸線方向一致.因機(jī)構(gòu)在初始狀態(tài)時(shí)動(dòng)定平臺(tái)平行,所以該3個(gè)約束力的線矢共面.該3個(gè)不匯交的約束力共面線矢是線性無關(guān)的,則約束了機(jī)構(gòu)動(dòng)平臺(tái)沿X,Y軸的移動(dòng)和繞Z軸的轉(zhuǎn)動(dòng).因此,3-RPS并聯(lián)機(jī)構(gòu)可實(shí)現(xiàn)繞X,Y軸的轉(zhuǎn)動(dòng)和沿Z軸的移動(dòng).
1.3 機(jī)構(gòu)動(dòng)力學(xué)模型
采用拉格朗日法(Lagrange法,L法)研究并聯(lián)機(jī)構(gòu)動(dòng)力學(xué)特性時(shí),從動(dòng)能和勢(shì)能的角度進(jìn)行分析,不用考慮機(jī)構(gòu)角速度和加速度的問題,求解較簡(jiǎn)便.因此,采用L法描述的3-RPS并聯(lián)機(jī)構(gòu)二階微分方程為[8]
(2)

2 神經(jīng)網(wǎng)絡(luò)滑模控制律
2.1 控制器的設(shè)計(jì)


在實(shí)際工程運(yùn)用過程中,由于摩擦、振動(dòng)等不確定因素的存在,不可能精確地建立機(jī)構(gòu)的動(dòng)力學(xué)模型,所以機(jī)構(gòu)模型不可避免地存在未建模部分,且存在外界干擾的作用,故F=0是不成立的.因此,上述的控制律τc所控制的機(jī)構(gòu)閉環(huán)系統(tǒng)不具有魯棒穩(wěn)定性.基于上述控制律的缺陷,本文采用RBF神經(jīng)網(wǎng)絡(luò)控制律τR來逼近控制律τc,其結(jié)構(gòu)原理模型如圖2所示.RBF神經(jīng)網(wǎng)絡(luò)算法具有強(qiáng)大的在線識(shí)別、非線性系統(tǒng)映射和自學(xué)習(xí)功能,可實(shí)現(xiàn)對(duì)系統(tǒng)模型不確定參數(shù)的在線估計(jì)和對(duì)外界干擾的補(bǔ)償,從而有效提高了滑模控制器的魯棒性.
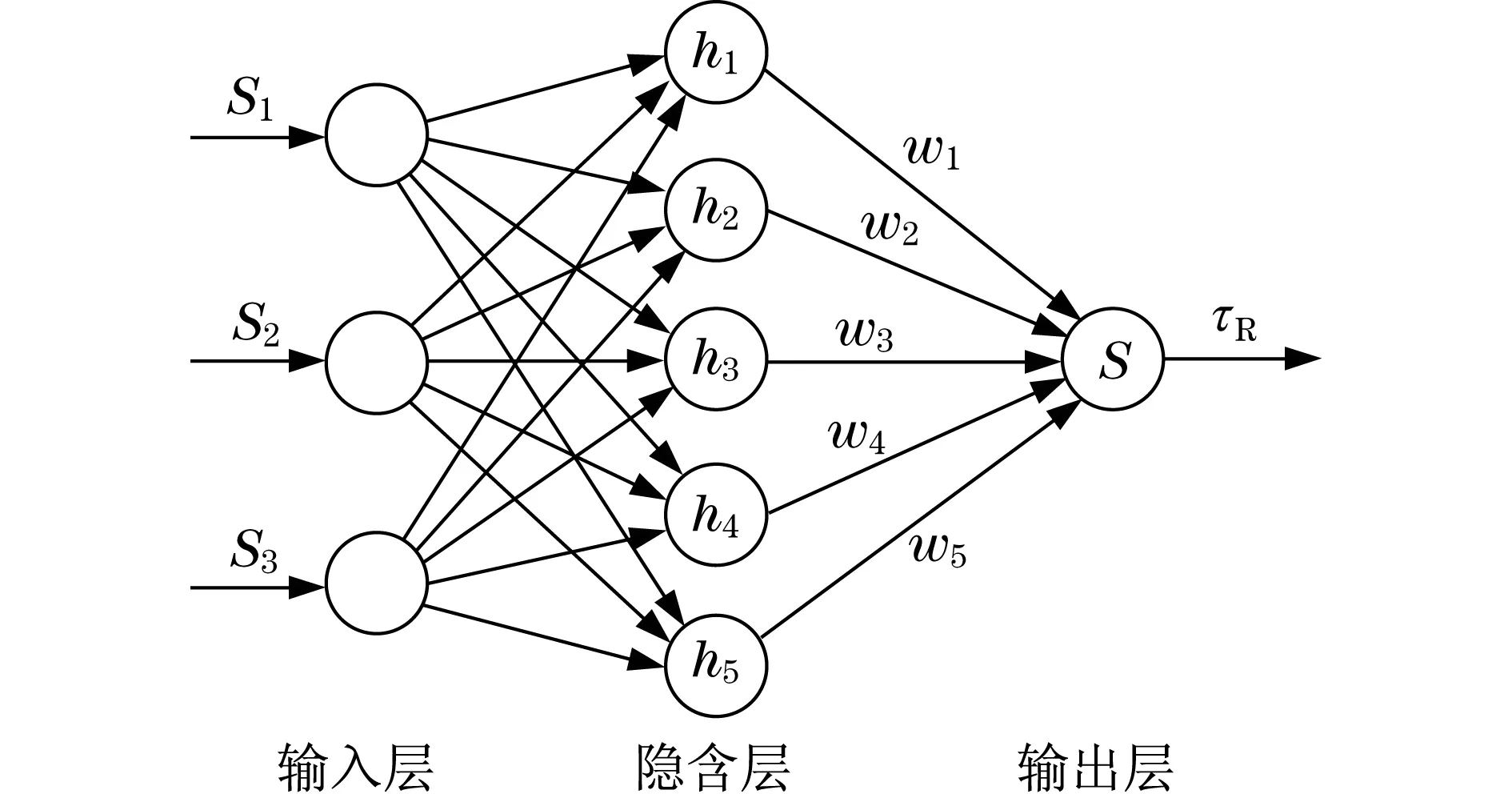
圖2 RBF結(jié)構(gòu)原理模型Fig.2 Model of RBF structure principle
通過引入RBF神經(jīng)網(wǎng)絡(luò)算法,則控制律τR可表示為

(3)
式中:τa為有界項(xiàng);τb為魯棒項(xiàng).
2.2 有界項(xiàng)分析
將式(3)代入式(2)的變形表達(dá)式可化簡(jiǎn)為
構(gòu)造的Lyapunov函數(shù)為
對(duì)上式求導(dǎo)可得
若存在已知函數(shù)|f|和常數(shù)|d|,使不等式|Fi|≤f,|Di|≤d成立.選取有界項(xiàng)為
(4)
式中:Γ(t)為關(guān)于Me的分段函數(shù);Kai=|τRi|+|τsi|+d+f.


2.3 魯棒項(xiàng)分析
對(duì)上式求導(dǎo)可得
式中:ω1=ω+F為機(jī)構(gòu)建模偏差.
(5)
式中:λmin(M)為矩陣M的最小特征值.
3 控制仿真


圖3 神經(jīng)網(wǎng)絡(luò)控制示意圖Fig.3 Schematic diagram of neural network

圖4 機(jī)構(gòu)X軸方向的跟蹤誤差曲線Fig.4 Tracking error curve of mechanism’s X axis
由機(jī)構(gòu)的跟蹤誤差曲線可知,機(jī)構(gòu)在滑模變結(jié)構(gòu)和神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)控制策略下都能達(dá)到一定的穩(wěn)定跟蹤精度,兩種控制方式在開始的1 s內(nèi),跟蹤誤差都比較大,這可能與機(jī)構(gòu)啟動(dòng)時(shí)需克服摩擦阻力有關(guān).但是隨著神經(jīng)網(wǎng)絡(luò)控制的逼近運(yùn)算,神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)控制的誤差逐漸趨近于0,而滑模變結(jié)構(gòu)控制的誤差還是較大,說明神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)的控制效果更好,在響應(yīng)速度和穩(wěn)定性方面較優(yōu).

圖5 機(jī)構(gòu)Y軸方向的跟蹤誤差曲線Fig.5 Trackingerror curve of mechanism’s Y axis

圖6 機(jī)構(gòu)Z軸方向的跟蹤誤差曲線Fig.6 Tracking error curve of mechanism’s Z axis
4 結(jié)論
通過分析3-RPS并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)特征和動(dòng)力學(xué)方程,為控制系統(tǒng)的設(shè)計(jì)提供了控制對(duì)象.在滑模變結(jié)構(gòu)控制的基礎(chǔ)上,引入RBF神經(jīng)網(wǎng)絡(luò)控制律,研究了機(jī)構(gòu)在兩種不同控制方式下的誤差曲線.結(jié)果表明:基于RBF神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)的閉環(huán)控制系統(tǒng),其軌跡跟蹤誤差更小,自適應(yīng)魯棒性更好,在工程實(shí)踐方面具有重要的參考價(jià)值.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50