基于多點檢測的空氣凈化系統設計
2019-04-03 08:51:32翟常冬管東方戴景鑫宋時凡
山東理工大學學報(自然科學版) 2019年3期
劉 聰,翟常冬,管東方,戴景鑫,宋時凡
(山東理工大學 電氣與電子工程學院,山東 淄博 255049)
近年來,隨著房屋裝修污染、室內電子產品造成的空氣污染等問題的出現,室內污染物的來源和種類愈加廣泛,室內空氣污染[1]已成為危害人類健康的“隱形殺手”。人們對健康問題愈加重視,對自己生活以及工作的空氣環境質量的要求和期望也在不斷提高。
實踐證明,當前市場上的空氣凈化產品能夠有效地提高室內空氣質量,但存在著一些明顯的缺陷,例如檢測裝置和凈化裝置為一個整體,凈化時間較長、凈化后室內各處空氣質量不均勻等情況[2]。本文提出了一種基于多點檢測和不定點凈化的新型空氣凈化系統,能夠有效地克服以上缺陷,實現大范圍、快速凈化室內空氣,有效提升人們生活環境的空氣質量。
1 系統工作原理
本系統采用星形拓撲結構[3],包括單個凈化端主機和多個檢測端從機組成,系統的整體結構如圖1所示。根據室內面積大小和現場情況在室內選取適量的采樣點,檢測端從機負責采集各采樣點處的空氣質量信息,并將信息通過WIFI傳輸到凈化端主機。在凈化端主機中采用以空氣質量指數表征空氣質量狀況的方法,依據本文給出的凈化算法解算各采樣點處的空氣質量指數,并在所有采樣點中選取合適數量的凈化點和規劃凈化點的凈化順序,最終移動凈化端主機到選取的各個凈化點完成室內空氣凈化任務。
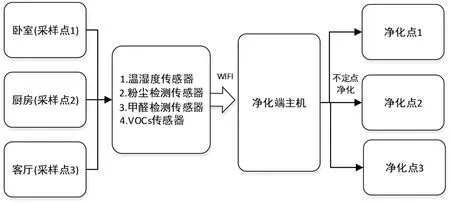
圖1 系統整體框圖Fig.1 System block diagram
2 系統硬件設計
2.1 整體電路設計
系統的硬件設計由檢測模塊、控制器、空氣凈化模塊、人機交互模塊和電源模塊等五部分組成,如圖2所示。
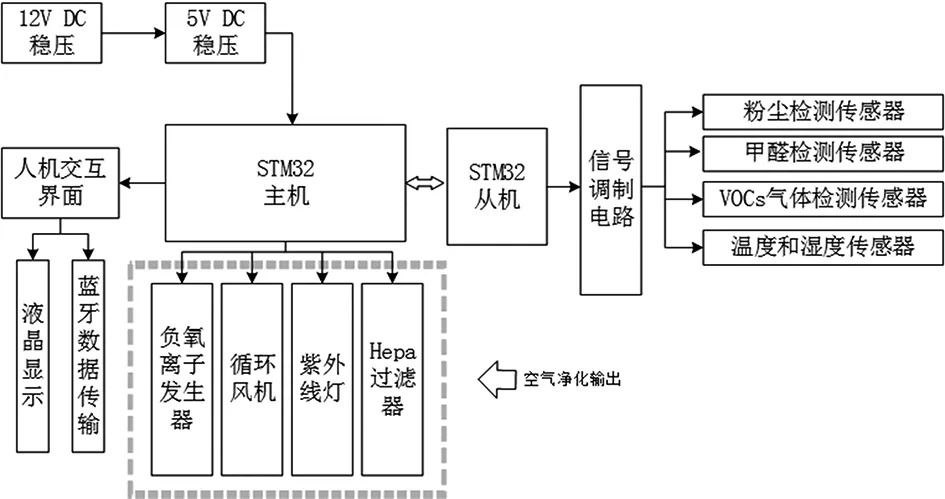
圖2 系統硬件結構圖Fig.2 Structure diagram of inspection system
選取PM2.5濃度、甲醛濃度、有毒氣體濃度、VOCs氣體濃度、溫度和濕度等六種空氣質量信息作為室內空氣質量的檢測指標,由檢測模塊完成信息采集。鑒于需要較高的數據采集精度和較快的數據處理速度,本文選用STM32單片機作為控制器,通過ADC和串口采集各氣體檢測模塊的電壓模擬量,從而完成各氣體濃度的解算和凈化算法的計算。最終由凈化模塊完成空氣凈化任務,提高室內的空氣質量至國家室內空氣質量標準[4]水平。系統運行中的各項數據參數均顯示在液晶顯示屏,并且用戶可通過手機藍牙遠程遙控和查看本系統。電源模塊則為整個檢測系統提供穩定的3.3 V工作電源,保障各組件正常運行。
2.2 傳感器信號調制電路
本系統所采用的傳感器多為氣體傳感器,所產生的信號多為毫伏級,需采用運算放大電路加以放大,以粉塵傳感器為例,調理電路如圖3所示,粉塵傳感器的工作原理是根據光的散射原理來開發的,微粒和分子在光的照射下會產生光的散射現象,同時還會吸收部分光的能量,求得入射光通過待測濃度場的相對衰減率即可測得粉塵濃度。
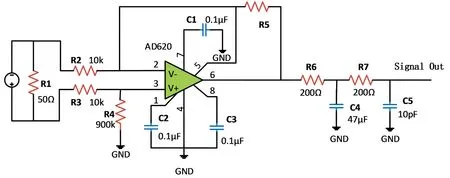
圖3 粉塵傳感器調理電路Fig.3 Sensor conditioning circuit
由于粉塵在傳感器中的擴散過程都是受溫度影響的,所以在恒定氧氣濃度下隨著溫度的不同,傳感器輸出的電流也不同。一般將環境溫度在25℃ 時測得的氧氣濃度的電流值作為標準值,其他溫度下測得電流在此標準值上變化,變化式為
signal@t=signal@25×Pcoe@t
(1)
其電流變化系數為
Pcoe(x)=Ax3+Bx2+Cx+D
(2)
式中:A=2.01×10-6;B=-2.60×10-5;C=1.70×10-2;D=0.561;x為環境溫度。
3 算法設計
3.1 空氣污染指數計算標準
目前,室內空氣品質評價[5]的方法有很多,如綜合指數法、主觀評價法、灰色理論法等,但都存在評價結果沒有明確物理意義,難以直接應用于本系統中采樣點處空氣污染程度的計算。本文通過對室內影響人體健康的主要空氣污染物研究和人體生理、心理對室內環境的適應程度分析,重新制定了一種基于污染損失率法的空氣污染指數計算標準,采用空氣污染指數值的形式表征室內空氣質量狀況,其計算標準如下:
根據《室內空氣質量標準》國家標準制定室內空氣品質等級,將室內環境分為一至五級5個級別,級別越高,污染越嚴重,對人體危害越大。選取的6項參數分別為:甲醛、PM2.5、有毒氣體、VOCs氣體、溫度、濕度,濃度分別為C1、C2、C3、C4、C5、C6,對室內環境的損害率分別為R1、R2、R3、R4、R5、R6。設污染物為第i種,濃度為Ci,其單項污染物對室內空氣的損害率Ri的函數關系式為
(3)
式中ai、bi由不同污染物的特性而定。根據《環境空氣質量指數(AQI)技術規定(試行)》的標準,認為Ci為一級時,空氣質量狀況較好,人體感覺空氣舒適度較好,此時認定室內空氣損害率為10%;Ci為五級時,空氣質量狀況屬于嚴重污染,人體感到明顯不適,此時認定室內空氣損害率為90%,再根據實際空氣質量狀況進一步修訂待定參數。
則空氣質量指數S的函數關系式為
(4)
式中Si表示單項污染物對室內空氣損害率的上限值,可采用室內空氣質量國家標準中的指標數據。
本系統采用的空氣污染指數計算標準包含單項污染物對室內空氣的損害率和所有污染物對室內空氣的算術損害率,較為全面地反映了各種污染物對室內環境的污染程度,能夠為凈化點的選取和凈化順序規劃提供精準可靠的數據。
3.2 凈化算法
模糊控制是基于數學模型來模擬人體思維、判斷和決策的智能控制方法,通過語言變量的形式表達人的經驗、常識,控制機理和策略,更加容易被人接受,現應用于機械、電氣、計算機等各個領域,在智能控制領域占有極為重要的地位。
本系統采用基于模糊控制[6]的凈化算法,通過語言變量的形式模擬人體思維,以空氣污染指數、空氣凈化預計時間長度和Flash存貯器歷史記錄中該點的凈化總次數為依據,在所有采樣點中選取一定數量的凈化點進行凈化,并對凈化順序作出規劃。
凈化算法如下:模糊控制器采用三參數結構,選取空氣質量指數S、空氣凈化預計時間長度T和凈化總次數N作為輸入量,空氣凈化順序Q作為輸出量,本文提出了15條模糊規則,第i條規則的模糊關系式為
Ri(S,T,N)=uSi×VTi×VNi(S,T,N)
(5)
利用MATLAB軟件對算法進行仿真,仿真結果如圖4所示。
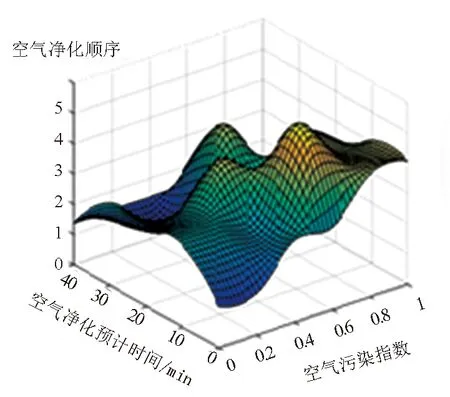
圖4 模糊控制算法的仿真結果Fig. 4 Simulation results of fuzzy control algorithm
由圖4可以看出,系統規劃出各采樣點的空氣凈化順序,若存在多個采樣點在空氣凈化順序Q中為同一等級的情況,則優先考慮空氣質量指數S指標大的采樣點。
取空氣質量指數目標值為N、排序后的各采樣點空氣質量指數原始值為P1,P2,…,Pi,為使室內空氣質量指數達到國家標準,求解凈化點個數m表達式為
(6)
式中k為凈化補償系數,與室內面積有關,普通家庭住房面積一般取為1.3。解算出凈化點個數m,并在完成凈化后再次檢測室內空氣質量,進一步判斷是否達到要求,未達到要求則再凈化一次。
凈化算法最終得到完成凈化任務所需的m個凈化點及其凈化順序Q。凈化主機按照凈化順序Q依次到m個凈化點處完成空氣凈化任務。
4 檢測實驗
4.1 凈化時間檢測實驗
選取兩個室內空氣質量大致相同、面積相同的房間甲和房間乙,在房間甲內放置市場上的某空氣凈化產品,作為對照系統;在房間乙內放置本文提出的空氣凈化系統,作為實驗系統。在兩個房間內同時通入大量且等量的汽車尾氣,實驗系統和對照系統同時開始工作,每隔10 min檢測1次房間甲和房間乙內的空氣質量,以空氣中的PM2.5濃度為例,結果如圖5所示。
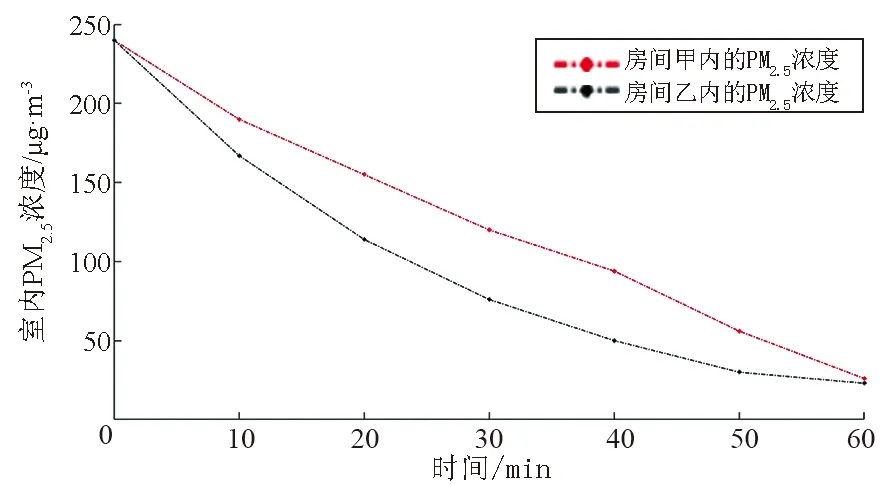
圖5 兩種凈化系統凈化效果對比圖Fig. 5 comparison of purification effects between two purification systems
房間甲和房間乙內的空氣PM2.5濃度最終均低于75 μg/m3,但房間乙空氣中的 PM2.5含量下降較快,在大約30 min后便降到75 μg/m3,而房間甲空氣中的PM2.5含量下降較慢,在45 min后達到75 μg/m3。實驗表明房間乙比房間甲能夠提前15 min左右完成凈化任務,可見本文提出的系統能夠明顯加快室內空氣凈化速度,縮短凈化時間。
4.2 均勻凈化檢測實驗
在實驗一的條件下進行實驗二操作,實驗系統和對照系統開始工作前,在房間甲內隨機選取7個取樣點,分別測量其PM2.5濃度,測量房間乙內相同7個位置的PM2.5濃度。實驗系統和對照系統完成凈化任務之后,再次檢測7個取樣點的PM2.5濃度。房間甲和房間乙凈化前后室內的PM2.5濃度檢測結果分別如圖6和圖7所示。
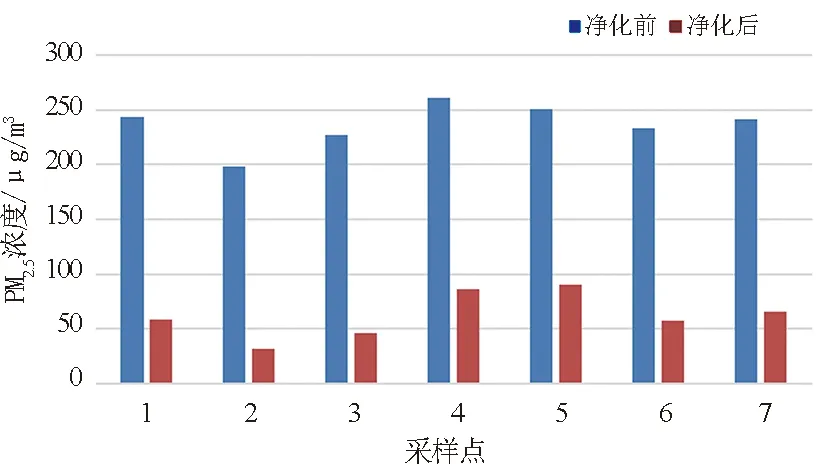
圖6 房間甲凈化前后PM2.5濃度檢測結果圖Fig. 6 The result diagram of PM2.5 concentration before and after purification of Room A
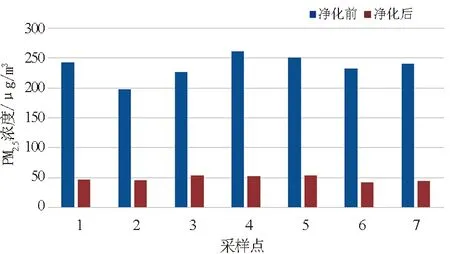
圖7 房間乙凈化前后PM2.5濃度檢測結果Fig. 7 The result diagram of PM2.5 concentration before and after purification of Room B
由圖6和圖7可以看出,由于距空氣凈化機越近空氣凈化效果越好的原因,完成凈化后房間甲會出現室內各處PM2.5濃度相差較大的情況,而房間乙內各處PM2.5濃度大致相同,相對比較均勻。實驗結果表明,本文提出的凈化系統能夠大范圍均勻地凈化室內空氣,使室內各處空氣質量相對一致,全面提高室內空氣質量。
5 結束語
在傳統空氣凈化器控制技術的基礎上,本文提出了基于多點檢測和不定點凈化的空氣凈化系統,優化了空氣凈化方法和策略,對室內不同區域進行區別性凈化,實現了室內空氣的均勻凈化和快速凈化。該系統智能化水平較高,彌補了此類產品在市場上的不足,具有很大的開發前景和市場效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34