基于RNN 的智能網(wǎng)聯(lián)汽車高精度定位方法
2019-04-07 11:23:28李曉暉鄧天民
汽車工程學報 2019年4期
李曉暉,方 芳,鄧天民
(1.重慶西部汽車試驗場管理有限公司,重慶 408300;2.重慶交通大學 交通運輸學院,重慶 400074)
智能網(wǎng)聯(lián)汽車作為 “互聯(lián)網(wǎng)+” 在汽車上的應用,具有安全、舒適、節(jié)能、高效行駛、可替代人操作等優(yōu)點。然而智能網(wǎng)聯(lián)汽車的運行環(huán)境復雜,運行過程多變,對高精度定位提出了更高的要求。因此,組合導航定位是未來智能出行的關鍵因素之一。
組合導航是非線性系統(tǒng),針對非線性系統(tǒng)問題,熊劍等[1]、王碩等[2]利用高斯濾波算法提高了定位精度,增強了預測的實時性,但是沒有針對噪聲進行具體分析。針對組合導航過程噪聲和量測噪聲的不確定性問題,王維等[3]、王慧麗等[4]、房德君[5]分別運用了無跡卡爾曼濾波方法、不確定融合估計的GPS/INS(Global Positioning System and Inertial Navigation System)濾波算法和自適應卡爾曼濾波方法進行試驗驗證,證明了其實用性和良好的魯棒性,但是缺少對INS 濾波的具體分析。針對GPS/INS 組合導航中INS 建模的問題,李增科等[6]、徐愛功等[7]分別提出了一種基于牛頓插值的GPS/INS組合導航慣性動力學多階建模算法和基于小波降噪的GPS/INS 緊組合方法,提高了系統(tǒng)的精度和穩(wěn)定性,但是缺乏對GPS 信號失效定位精度的分析。針對GPS 中斷問題,譚興龍等[8]、胡方強等[9]針對GPS/INS 組合系統(tǒng)中GPS 中斷時,導航性能會急劇降低的情況,分別提出了改進徑向基神經(jīng)網(wǎng)絡結合自適應濾波輔助的組合系統(tǒng)導航算法和改進的自適應卡爾曼濾波方法,試驗證明了其有效性。
卡爾曼濾波的相關方法較為成熟、性能良好,但是針對GPS 失效問題,卡爾曼濾波方法在定位高精度性和實時性上效果有待提高。周邵磊等[10]提出了單目視覺ORB-SLAM/INS 組合導航方法,通過初始化階段利用ORB-SLAM 方法計算的尺度因子修正慣導系統(tǒng)的誤差。焦雅林等[11]提出了基于改進粒子濾波算法的GPS/DR 車輛組合導航信息融合技術,其濾波性能明顯優(yōu)于擴展卡爾曼濾波(Extended Kalman Filter,KEF)。李士心等[12]利用非線性濾波方法,強跟蹤濾波漸消因子加入容積卡爾曼濾波中,提出了捷聯(lián)慣導/里程計組合導航的自適應強跟蹤濾波算法,達到了慣性原件的理論精度。
但是,隨著人工智能的發(fā)展和計算機水平的提高,神經(jīng)網(wǎng)絡方法用于導航定位成為研究重點與熱點。循環(huán)神經(jīng)網(wǎng)絡(Recurrent Neural Network, RNN)具有極強的非線性動態(tài)映射能力和動態(tài)記憶功能,適用于動態(tài)過程建模,實現(xiàn)動態(tài)系統(tǒng)預測。
馮永等[13]提出一種攜帶歷史元素的RNN 推薦模型負責用戶短期動態(tài)興趣建模,并結合前饋神經(jīng)網(wǎng)絡(Feedforward Neural Networks,F(xiàn)NN)構建了多神經(jīng)網(wǎng)絡混合動態(tài)推薦模型(Hybrid Dynamic Recommendation Model Based on Multiple Neural Networks,MN-HDRM),在多項評價指標上具有優(yōu)越的性能。張國興等[14]將SDZ(Surprisal-Driven Zoneout)應用于RNN 并提出了基于SDZ-RNN 的出租車目的地預測方法。該方法有效地縮短了訓練時間,提高了預測精度。ORDó?EZ 等[15]分析了森林環(huán)境中GPS 測量的準確性,應用RNN 建立一個將觀測誤差與GPS 信號相關聯(lián)的數(shù)學模型,RNN網(wǎng)絡效果良好。NAKHAEI 等[16]比較3 種類型的人工神經(jīng)網(wǎng)絡,即徑向基函數(shù)神經(jīng)網(wǎng)絡(Radial Basis Function Neural Network, RBFNN)、RNN 以及多變量非線性回歸(Multiple Non-Linear Regression, MNLR)模型來預測浮選柱的冶金性能,對比了其訓練能力和準確性。
因此,本文提出了一種基于RNN 的高精度定位模型,該模型通過大量精確的GPS/INS 數(shù)據(jù)進行訓練。當GPS 失效時,訓練好的模型預測失效時的定位信息,有效提高了組合導航的定位效果。
1 高精度定位方法
1.1 RNN 網(wǎng)絡模型
RNN 是傳統(tǒng)前饋神經(jīng)網(wǎng)絡(FNN)的一種變體。 RNN 和FNN 之間的區(qū)別在于FNN 的神經(jīng)元僅通過層和層之間的連接來傳遞信息。雖然RNN 在網(wǎng)絡中引入了環(huán)形結構,但它建立了神經(jīng)元與自身的連接。通過這種連接RNN 可以將網(wǎng)絡中最后一個時間點的輸入存儲為“存儲器”,并在下一步中影響網(wǎng)絡輸出。對于FNN,只能將輸入通過隱藏層映射到輸出層,而RNN 可以將整個歷史記錄映射到每個輸出神經(jīng)元。因此,在輸入和輸出都是序列數(shù)據(jù)的預測問題中,RNN 比FNN 具有更好的性能[17]。
RNN 的預測過程類似于FNN,其由前向傳播算法完成。FNN 的訓練過程是通過反向傳播實現(xiàn)的,而RNN 需要通過時間維度和反向傳播時間(Back Propagation Through Time,BPTT)疊加反向傳播的結果,因為不同時間步長之間會相互影響。通常,循環(huán)神經(jīng)網(wǎng)絡是推測或完成信息的不錯選擇。因此,本文采用基于RNN 的狀態(tài)空間模型來描述智能聯(lián)網(wǎng)車輛的驅動過程。RNN 的結構如圖1 所示。它有3 層,即輸入層、隱藏層和輸出層[18]。
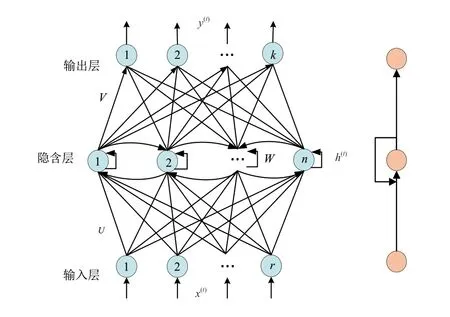
圖1 RNN 網(wǎng)絡結構
RNN 的數(shù)學模型為:
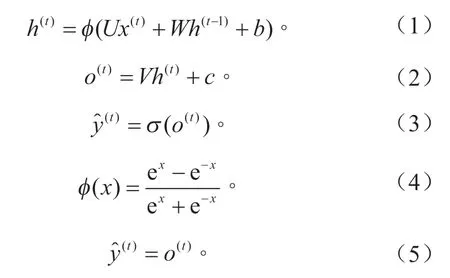
式中:t表示t時刻;x(t)表示輸入層輸入;h(t)、ht()-1分別表示t時刻和t-1 時刻的隱含層輸出;φ(為隱含層激活函數(shù),一般選擇tanh 函數(shù);o(t)表示輸出層輸入;表示輸出層輸出;σ(為輸出層激活函數(shù),這里采用純線性Pureline 函數(shù);U表示輸入層到隱含層的連接權值;W、b分別為隱含層之間的連接權值和偏置;V、c分別為隱含層與輸出層連接權值和偏置。
1.2 基于RNN 的訓練模型
(1)樣本集預處理
采用最大最小歸一化方法對投影處理后的樣本進行歸一化處理,如式(6)所示。
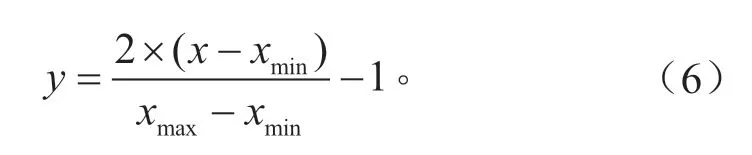
式中:x,y分別表示原始數(shù)據(jù)和歸一化后的數(shù)據(jù);xmax,xmin分別表示x的最大值和最小值。訓練數(shù)據(jù)通過歸一化后保留其最大值、最小值、平均值等信息,用于失效預測模型中神經(jīng)網(wǎng)絡輸入數(shù)據(jù)的歸一化及其輸出數(shù)據(jù)的反歸一化。
(2)對RNN 模型進行訓練,訓練過程如下。輸入層的輸入、輸出分別為:
隱含層的輸入、輸出分別為:
輸出層的輸入、輸出分別為:
1.3 基于RNN 的GPS 失效定位模型
假設GPS 失效時,該時刻記為t0,前一時刻經(jīng)緯度為令T為失效時長,f為數(shù)據(jù)采集頻率,則預測步數(shù)η= ×T f,預測軌跡及誤差為:
2 試驗
2.1 數(shù)據(jù)采集系統(tǒng)
本文基于GPS/INS 組合導航系統(tǒng),結合RNN模型來實現(xiàn)智能網(wǎng)聯(lián)汽車全域的高精度定位,其系統(tǒng)結構如圖2 所示。
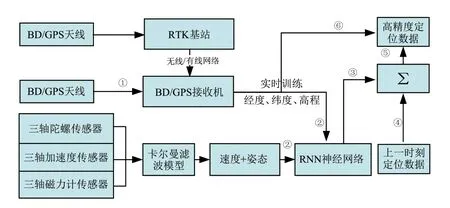
圖2 GPS/INS 定位系統(tǒng)結構
定位系統(tǒng)通過BD/GPS 天線接收衛(wèi)星,然后通過①的放大和變頻處理傳輸?shù)紹D/GPS 接收機中,通過接收機結合RTK 基站的差分信號得到時間、經(jīng)度、緯度、高程等定位信息;然后通過②將定位數(shù)據(jù)中的經(jīng)度、緯度以及INS 采集的速度和姿態(tài)角進行歸一化處理,作為神經(jīng)網(wǎng)絡的輸入,通過③進行模型訓練得到預測的經(jīng)度、緯度增量;結合④中的上一時刻真實的定位數(shù)據(jù),通過⑤輸出預測的下一時刻定位數(shù)據(jù)。在衛(wèi)星信號正常階段,針對模型進行訓練,⑤輸出的預測定位經(jīng)緯度與⑥傳輸?shù)漠斍皶r刻真實定位經(jīng)緯度相對比,得到其誤差,從而不斷修正神經(jīng)網(wǎng)絡的參數(shù)。當不能正常接收到衛(wèi)星信號時,通過②~⑤即可得到預測的高精度定位數(shù)據(jù)。
2.2 試驗數(shù)據(jù)及模型
數(shù)據(jù)采集使用Vbox 系統(tǒng),自建Vbox-RTK 差分基站,使用48 MHz 電臺通訊,數(shù)據(jù)采樣率為100 Hz,經(jīng)過整理后約有37 萬組有效數(shù)據(jù)。
根據(jù)數(shù)據(jù)的特性,構建兩種不同的神經(jīng)網(wǎng)絡模型,其中模型1 使用BP 神經(jīng)網(wǎng)絡,模型2 使用RNN。兩個模型輸入均為速度、航向角、俯仰角和橫滾角,輸出為經(jīng)度增量和緯度增量,隱含層為含有15 個神經(jīng)元的網(wǎng)絡結構。模型結構如圖4 所示。

圖3 數(shù)據(jù)采集區(qū)域衛(wèi)星圖
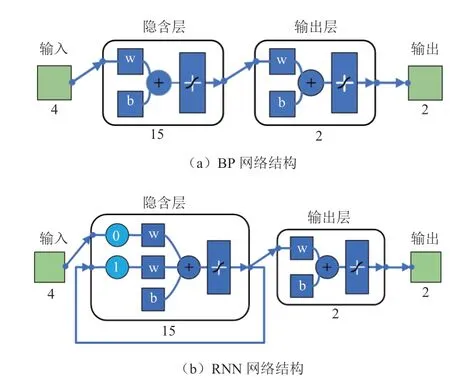
圖4 BP 神經(jīng)網(wǎng)絡和RNN 的模型結構
3 討論與分析
3.1 預測誤差分析
基于訓練完成的BP 神經(jīng)網(wǎng)絡和RNN 高精度定位模型,使用40 000 余組測試樣本分別進行測試,從而獲得預測緯度增量和預測經(jīng)度增量。將預測經(jīng)緯度增量與測試樣本經(jīng)緯度增量分別進行比較,其經(jīng)緯度增量誤差曲線如圖5 所示,誤差數(shù)據(jù)統(tǒng)計量對比見表2。
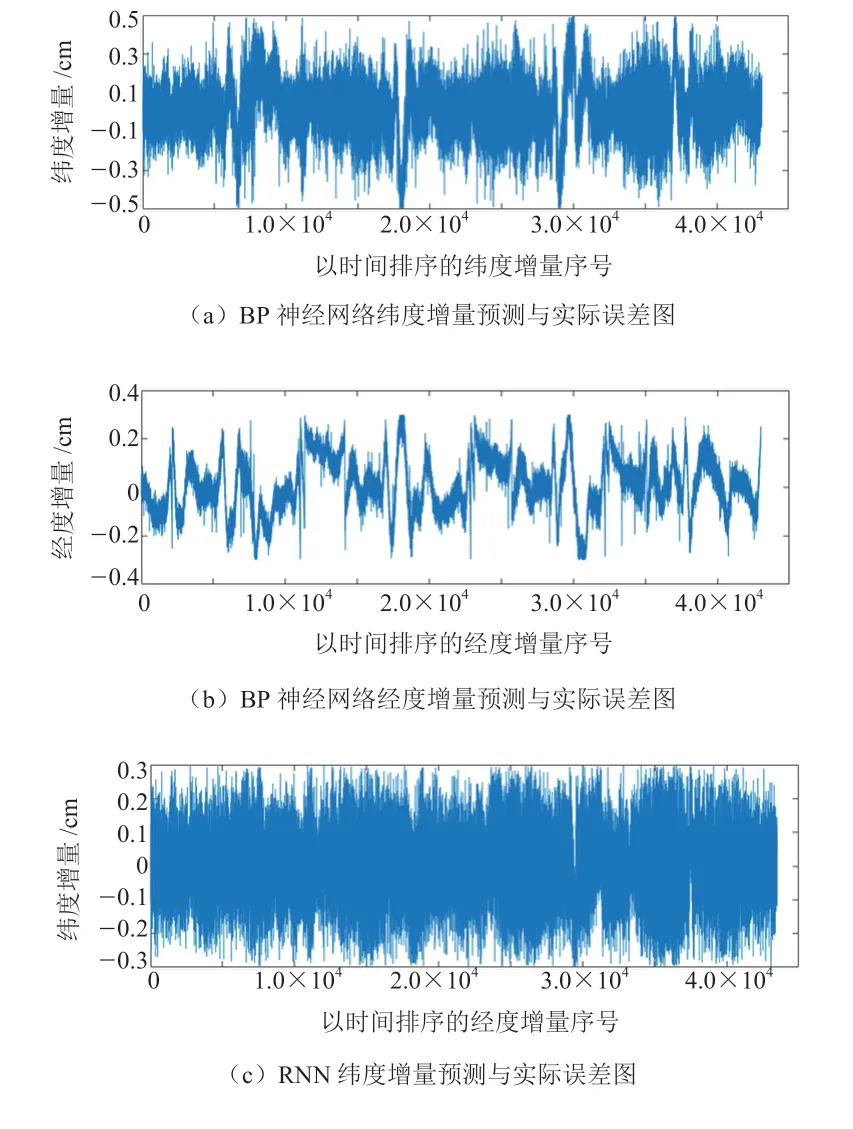
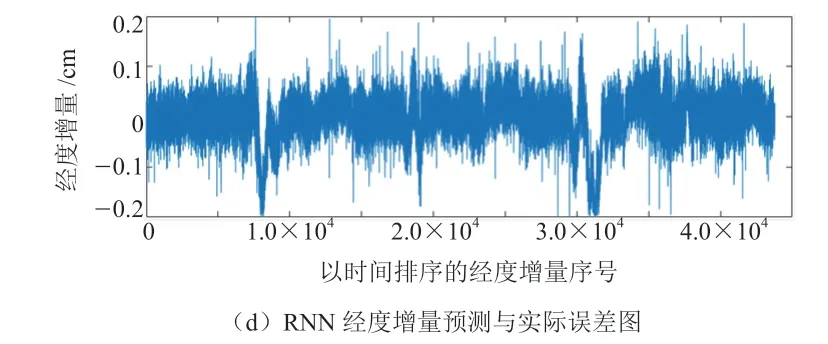
圖5 預測經(jīng)緯度增量誤差曲線
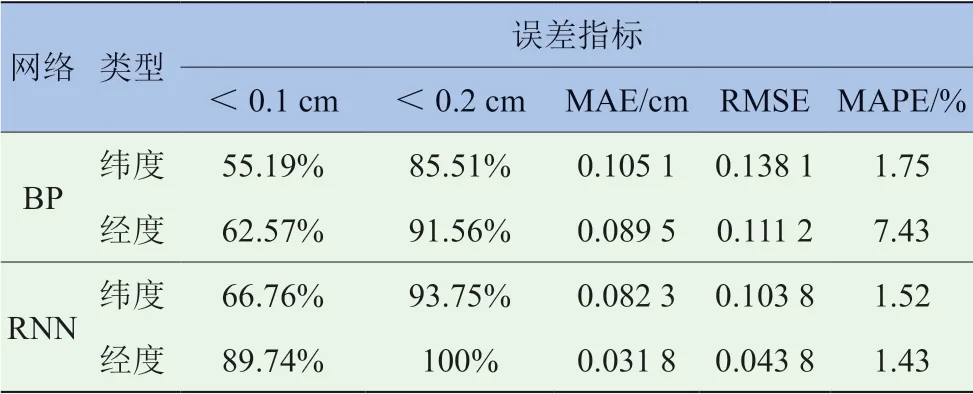
表2 網(wǎng)絡預測誤差指標對比
由圖5 和表2 可知,BP 神經(jīng)網(wǎng)絡絕對誤差均小于0.5 cm,85%絕對誤差小于0.2 cm;RNN 經(jīng)緯度絕對誤差均小于0.3 cm,90%絕對誤差小于0.2 cm,RNN 預測結果與BP 神經(jīng)網(wǎng)絡相比波動較平穩(wěn),預測效果更好。
對于平均絕對誤差(Mean Absolute Error,MAE)指標,RNN 相比于BP 神經(jīng)網(wǎng)絡緯度減少了14.8%,經(jīng)度減少了64.5%,則RNN 預測經(jīng)緯度更接近真實值。對于均方根誤差(Root Mean Square Error,RMSE)指標,RNN 相比于BP 神經(jīng)網(wǎng)絡緯度減少了24.8%,經(jīng)度減少了60.6%,RNN 的RMSE 低于BP神經(jīng)網(wǎng)絡,預測值偏離真實值的程度得到改善,預測精度高于BP 神經(jīng)網(wǎng)絡。對于平均絕對百分比誤差(Mean Absolute Percent Error,MAPE)指標,RNN相比于BP 神經(jīng)網(wǎng)絡緯度減少了13.1%,經(jīng)度減少了80.7%,RNN 模型優(yōu)于BP 預測模型。
RNN 相比于BP 神經(jīng)網(wǎng)絡預測經(jīng)緯度更接近真實值,預測誤差波動范圍也更小,模型預測精度更高,基于RNN 的定位方法整體性能更佳。
3.2 不同失效時長誤差分析
根據(jù)模型對比分析,選擇性能更優(yōu)的RNN 模型進行不同GPS 失效時長的車輛預測軌跡誤差討論。本文選取了試驗中采集的4 段連續(xù)的汽車行駛軌跡,21 000 余組試驗數(shù)據(jù),分別假定GPS 失效時長為1 s、2 s、5 s、10 s、30 s,預測車輛運動軌跡。圖6 為試驗路徑的一段,數(shù)據(jù)采集點5 800 余組。圖中9 條線段分別表示車輛實際行駛軌跡和GPS 失效1 s、2 s、5 s、10 s、30 s 的預測軌跡,圖7 為整體誤差,圖中的紅色方框區(qū)域為圖6 中軌跡的對應誤差。
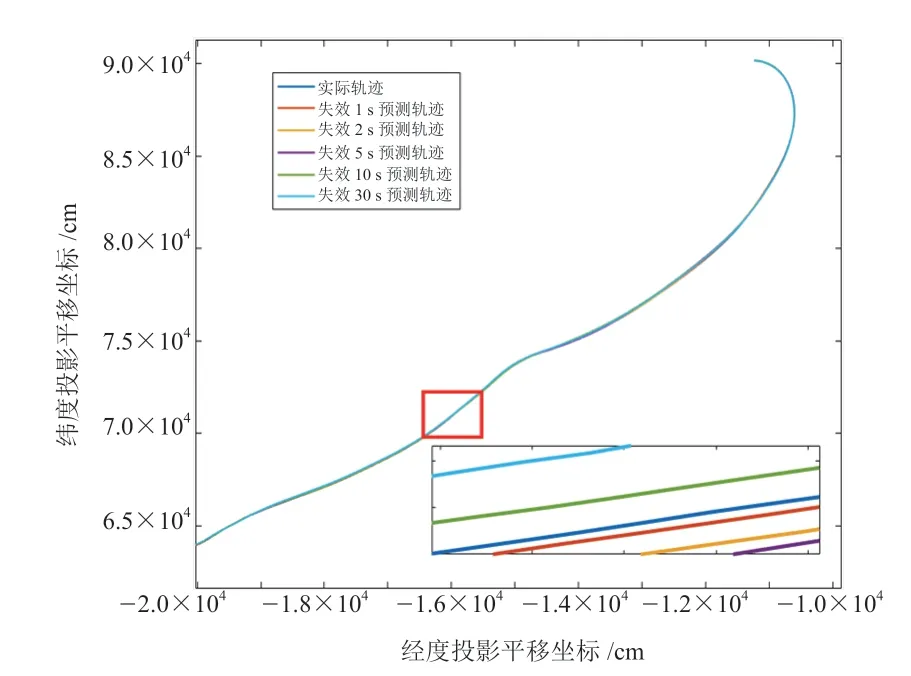
圖6 不同失效時長預測軌跡對比
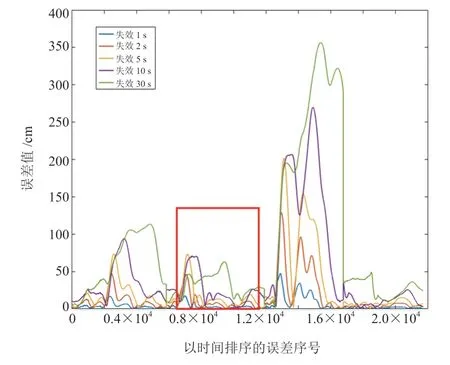
圖7 GPS 不同失效時間整體誤差分布
圖6 展示了預測軌跡與實際軌跡的投影平移曲線,從局部放大圖可以看出,失效1 ~2 s 短時間時,軌跡基本重合,即預測值與實際值吻合得較好,模型對測試樣本有較好的預測能力,具有較強的泛化能力;隨著失效時間的增加,預測軌跡偏離實際軌跡逐漸增大,偏離程度增強。
由圖7 可知,隨著GPS 失效時間的增加,誤差隨之增大,但是不是呈現(xiàn)比例的增大。失效時間30 s 的預測值誤差最大,但均在4 m 范圍內。對GPS 不同失效時長的預測數(shù)據(jù)進行細化分析,表3為不同誤差范圍內的數(shù)量及比例,表4 為誤差指標分析。
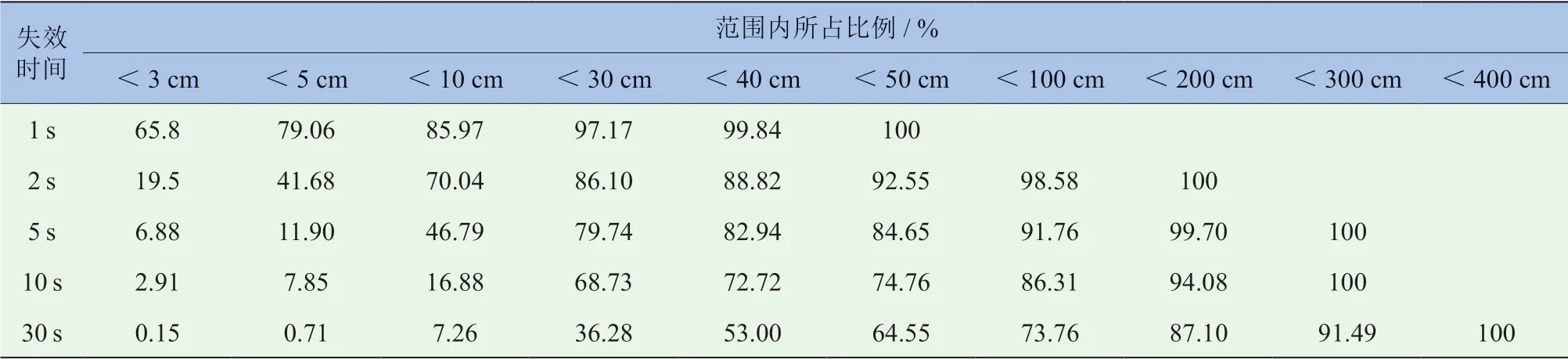
表3 GPS 不同失效時長的誤差分析
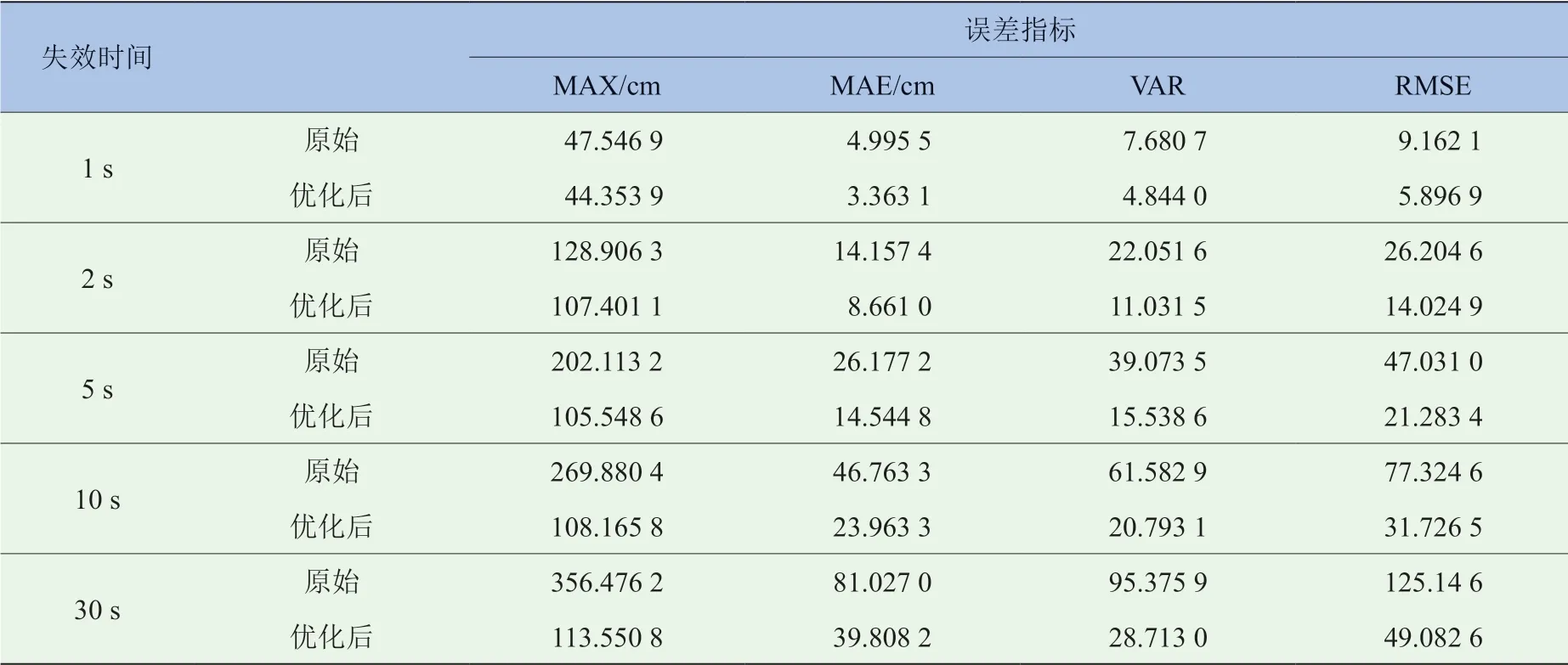
表4 GPS 不同失效時長的誤差指標分析
GPS 失 效 誤 差1 s、2 s、5 s、10 s 和30 s 的90%以上誤差分別小于30 cm、50 cm、100 cm、200 cm 和300 cm,50%以上誤差分別小于3 cm,10 cm、30 cm 和50 cm。基于RNN 的預測模型在失效30 s 內,90%的誤差在300 cm 內,特別是在失效10 s 內,精度可以達到10 cm 內。隨著失效時長的增加,預測精度下降,但整體預測效果良好。
對于最大值(MAX)指標,GPS 失效1 s、2 s、5 s、10 s 和30 s 分 別 約 為47 cm、129 cm、202 cm、270 cm 和356 cm,整體誤差值小;平均絕對誤差(MAE)分別約為5 cm、14 cm、26 cm、47 cm 和81 cm,預測值偏離真實值小,失效時間1 ~30 s 時預測精度高。對于方差(VAR)和均方根 誤 差(RMSE),1 s、2 s、5 s、10 s 和30 s 的VAR 分別約為4.84、11.03、15.54、20.79、61.58 和95.38;RMSE 分別約為9.16、26.20、47.03、77.32和125.15,失效時長低于30 s 時,預測較為穩(wěn)定,隨著失效時長的增加,穩(wěn)定性急劇下降。
在圖7 中的1 200 ~1 600 條數(shù)據(jù)范圍內,誤差值遠高于平均值,結合表4 中誤差的VAR 和RMSE 偏大情況,主要是由于該時間內定位衛(wèi)星數(shù)較少。此數(shù)據(jù)占總體數(shù)據(jù)的20%,去除該數(shù)據(jù),剩余近1 700 條衛(wèi)星數(shù)較多情況下的數(shù)據(jù),表4 中優(yōu)化后的數(shù)據(jù)為其誤差指標分析。
對比可知,關于MAX 和MAE 指標,失效1 s時分別低于44 cm 和4 cm,比原來有少量減少;對于失 效2 s、5 s、10 s 和30 s,MAX 分別約 為107 cm、105 cm、108 cm 和113 cm,減少較多,但4 個失效時間MAX 相差較小,表明隨著失效時間的增加,預測位置增量疊加增大,預測偏差程度趨于穩(wěn)定。MAE 分別約為9 cm、15 cm、24 cm 和40 cm,表明預測值接近實際值,預測精度較高,隨著失效時間的增加,定位精度降低。VAR 指標均低于30,RMSE 指標均低于50,表明預測波動平穩(wěn),預測系統(tǒng)較為穩(wěn)定,但隨著失效時長的增加,穩(wěn)定性下降。
4 結論
本文提了一種全域GPS/INS 高精度定位方法,該方法基于GPS/INS 組合導航的定位數(shù)據(jù),結合循環(huán)神經(jīng)網(wǎng)絡建立了一種機器學習模型。試驗表明,該模型的輸出結果能夠高精度逼近GPS/INS 組合導航系統(tǒng)的定位值,在GPS 信號失效30 s 時,定位誤差低于40 cm。本文提出的定位方法為組合導航系統(tǒng)應用中GPS 信號失鎖問題的解決提供了一種有效的方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56