基于RBF神經網絡識別路面不平度的研究
2019-04-07 02:36:52谷盛豐鄭玲玲
汽車工程學報 2019年3期
谷盛豐,顧 久,鄭玲玲,趙 旗,李 杰
(1.吉林大學 汽車仿真與控制國家重點實驗室,長春 130025;2.一汽-大眾汽車有限公司,長春 130011)
路面不平度對路面質量、車輛平順性和乘員舒適性均有直接影響。因此,路面不平度識別具有理論研究價值和實際應用意義[1]。
1986年,Rumelhart和McClelland建立了BP神經網絡,將誤差逆傳播算法作為反向計算引入以往正向計算的多層前饋網絡,具有完整的數學推導[2]。其后,J.Moody 和C.Darken提出RBF(Radial Basis Function)神經網絡,相比BP神經網絡,其在實時性、避免局部最小和最佳逼近等方面具有優勢,并且結構簡單,訓練速度快。
2007年,張麗霞等[3-4]分別建立了平順性4自由度平面模型和平順性7自由度空間模型,在頻域以車身俯仰角加速度和車身垂直加速度的功率譜密度作為輸入,應用RBF神經網絡對路面不平度功率譜密度進行識別。
2014年,張麗霞等[5]采用平順性7自由度空間模型,在時域將車身垂直加速度和車身俯仰角加速度作為輸入,應用RBF神經網絡對左前輪路面不平度進行識別。
2017年,王靜等[6]建立了平順性5自由度平面模型,在時域以車身俯仰角加速度、座椅垂直加速度、前輪垂直加速度和座椅垂直位移作為輸入,應用RBF神經網絡對路面不平度進行識別。
上述基于RBF神經網絡識別路面不平度的研究,是基于車輛響應識別路面不平度的探索。但是,這些研究存在3個問題:既沒有考慮如何選擇車輛響應,也沒有考慮如何合理設計車輛響應組合作為輸入方案,更沒有考慮如果對識別效果進行定量分析,不利于在實際中應用。
針對上述3個問題,將對RBF神經網絡和訓練過程、RBF神經網絡輸入選擇、RBF神經網絡輸入方案確定和RBF神經網絡識別路面不平度的評價指標進行研究,以便為實際應用RBF神經網絡識別路面不平度提供理論和方法基礎。
1 RBF神經網絡和訓練過程
1.1 RBF神經網絡
RBF神經網絡是具有輸入層、單個隱含層和輸出層的3層前饋型神經網絡。
RBF神經網絡的特點是,輸入層和隱含層之間沒有權值,僅隱含層和輸出層之間有權值。隱含層的傳遞函數為徑向基函數,常用高斯函數。
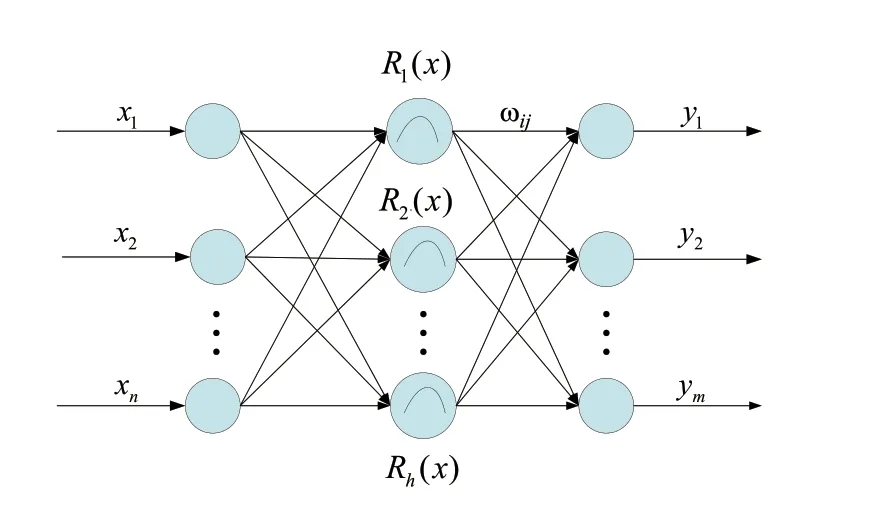
圖1 RBF神經網絡拓撲結構
1.2 RBF神經網絡的訓練過程
RBF神經網絡的訓練過程,與BP神經網絡的訓練過程不同,它沒有反向傳播的訓練算法,不需要預先設定訓練次數,而是不斷調整聚類中心,在確定最終的聚類中心后,計算隱含層與輸出層之間的權值,而且輸入層和隱含層之間沒有權值。
RBF神經網絡的訓練過程如下。
第1步:網絡初始化
確定輸入層神經元節點數 ,輸出層神經元節點數m,隱含層為單層1;初始化RBF神經網絡創建和訓練函數需要的參數,設置學習率η;將訓練集的輸入數據隨機分為h個樣本,計算h個樣本的均值作為初始聚類中心ci,i =1,2,…,nh。
第2步:將輸入數據與聚類中心ci對應
計算輸入數據xp和每個ci之間的歐式距離最小,將xp歸類與ci對應,即
第3步:聚類中心調整
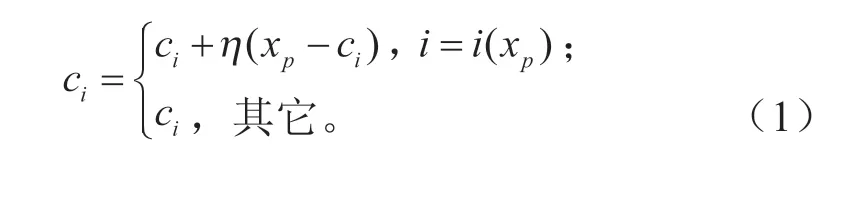
由與ci對應的數據xp調整聚類中心,調整規則為:如果聚類中心不再變化,則為最終的聚類中心。第4步:徑向基函數方差計算

第5步:隱含層與輸出層之間的權值計算

第6步:輸出數據計算

第7步:訓練完成,準備測試。
2 RBF神經網絡3個問題的解決方案
2.1 輸入選擇
由于希望在實際車輛上應用RBF神經網絡識別路面不平度,因此,應當選擇可以在實際車輛上測試的車輛響應作為RBF神經網絡的輸入。
當采用車輛和路面不平度系統4自由度平面模型描述汽車系統振動時,前輪垂直加速度˙˙z1、后輪垂直加速度˙˙z3、前懸架與車身連接點垂直加速度˙˙zb1和后懸架與車身連接點垂直加速度˙˙zb13,可以由加速度傳感器測量[7];車身俯仰角速度˙θ,可以由微慣性測量單元MIMU中的陀螺儀測量[8];車身俯仰角位移˙θ,可以由定位-定向測姿組合導航系統SPAN-CPT中的慣性測量單元IMU測量[9-10];前懸架動撓度fd1和后懸架動撓度fd3,可以由拉線位移傳感器測量[11]。因此,選擇上述可以測試的車輛響應作為RBF神經網絡輸入。
2.2 輸入方案確定
輸入方案確定,是指選擇哪些車輛響應作為神經網絡的輸入。根據輸入選擇,可以用于RBF神經網絡輸入的車輛響應為8個。如果每個車輛響應有兩種情況:作為輸入和不作為輸入,全部車輛響應進行組合,就有28=256個輸入方案。因此,為了減少輸入方案的個數,引入正交試驗設計確定具有代表性的車輛響應組合作為輸入方案。
正交試驗設計通過正交表實現代表性的輸入方案設計。正交表常用La(bc)表示,L表示正交表,a表示正交表的行數,b表示因素的水平數,c表示正交表的列數。
正交表選擇的基本原則是[12],水平應與正交表水平數一致,正交表的列數應大于或等于因素個數,在容納因素的情況下選取小號正交表。
根據上述選取原則,將每個車輛響應視為一個因素,選取的正交表格式為L32(231)。每個因素對應一列,其余為空列。輸入方案中不包含某個響應,其水平為1;包含某個響應,其水平為2。
2.3 識別效果評價
為了對RBF神經網絡識別效果進行評價,引入相關系數和均方根誤差兩個評價指標[13-14]。
相關系數R表示預測輸出和期望輸出變化趨勢一致的程度,均方根誤差RMSE表示識別結果的穩定性,其公式為:
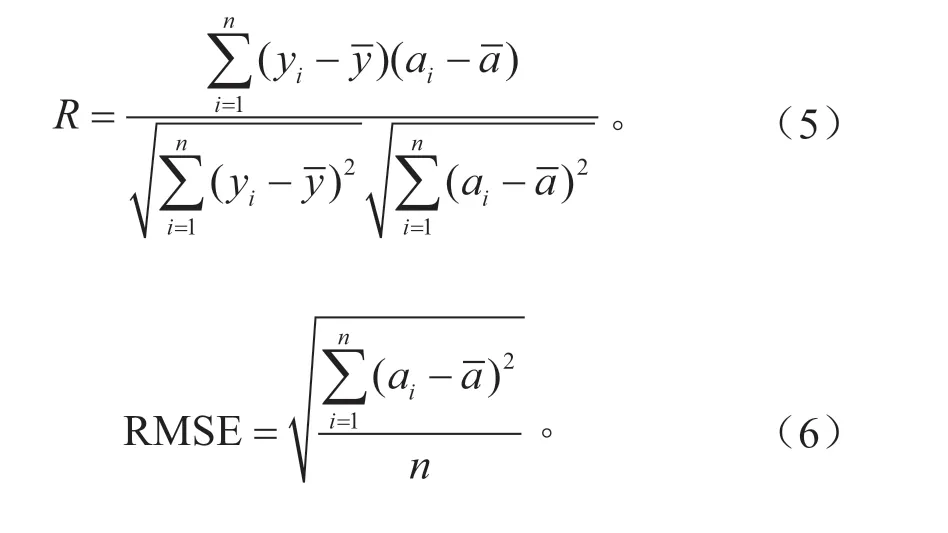
式中:yi和ai分別為預測輸出和期望輸出的第i個點;和分別為預測輸出和期望輸出的平均值;n為采樣點數。
相關系數越高,說明識別越好。均方根誤差越小,識別結果越好,越穩定可靠。兩者同時最好表示識別效果最佳。
3 前輪路面不平度的RBF神經網絡識別
3.1 車輛和路面不平度系統4自由度平面模型
車輛和路面不平度系統4自由度平面模型,由車身、前后懸架和前后車輪組成,如圖2所示,其參數說明見表1。
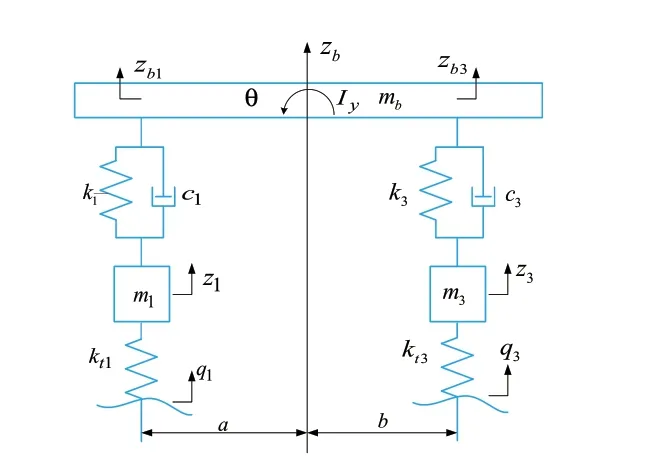
圖2 車輛和路面不平度系統4自由度平面模型
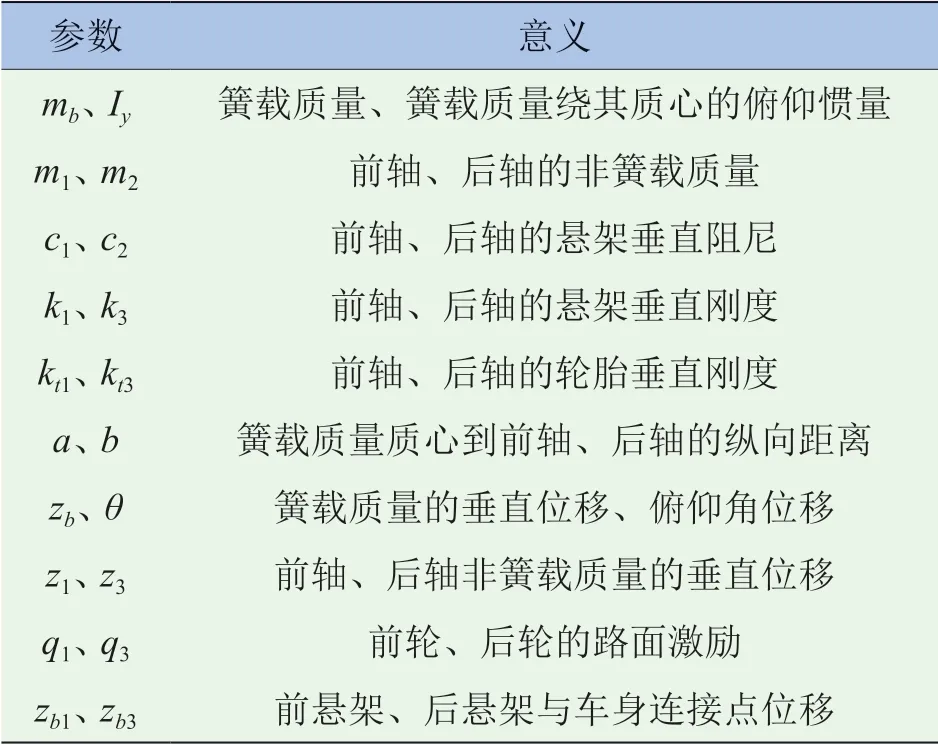
表1 車輛和路面不平度系統4自由度平面模型參數
采用濾波白噪聲描述前后輪路面不平度后,車輛和路面不平度系統4自由度平面模型在數學上可表示為[15]:
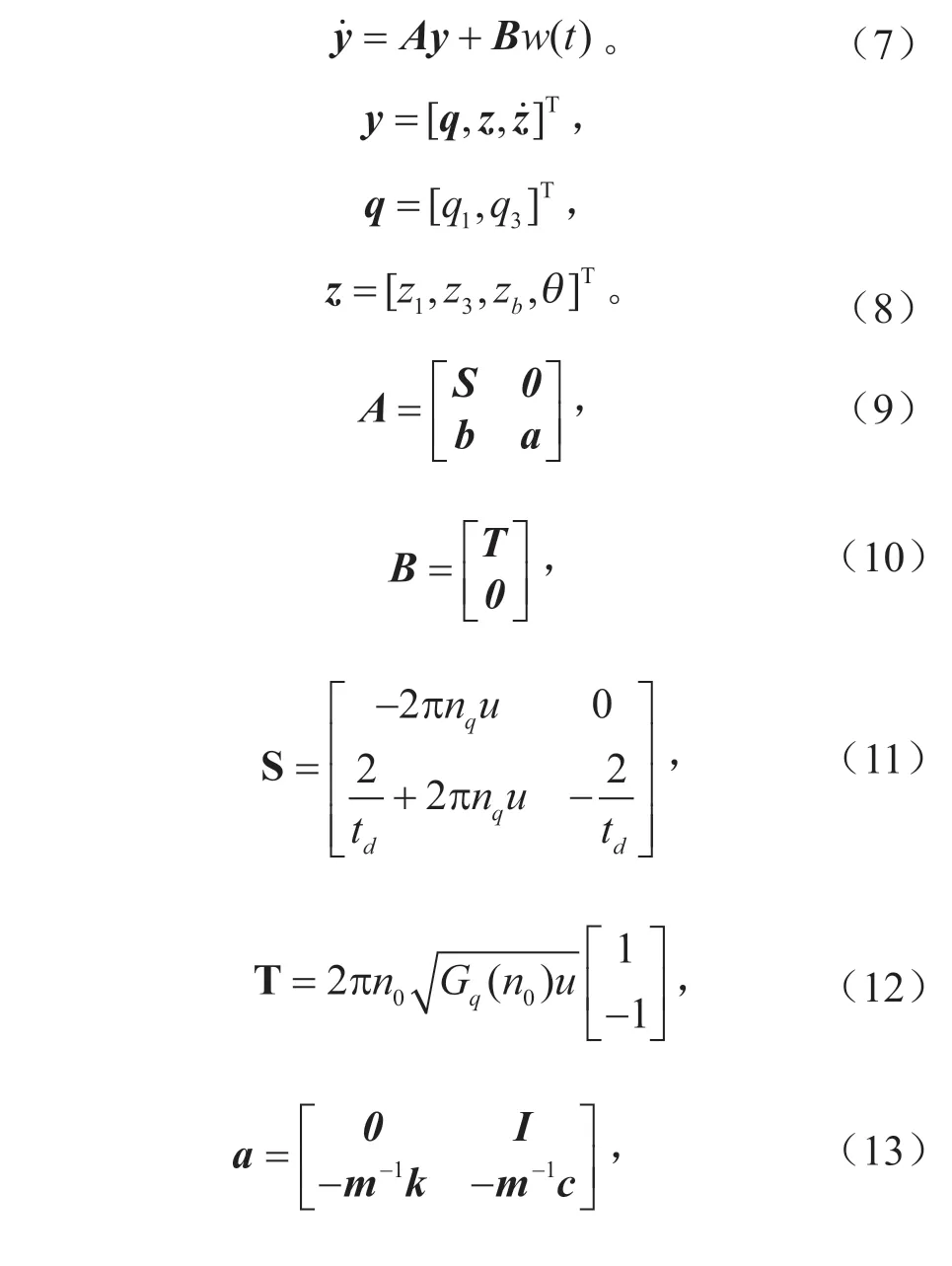
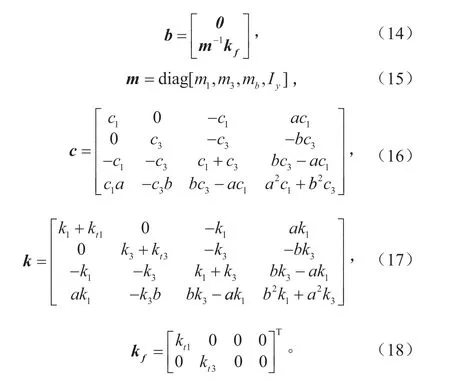
式中:w(t)為均值為0和方差為1的標準高斯白噪聲;u為車速;Gq(n0)為路面不平度系數,由國標給定;nq=0.0001為空間下截止頻率;n0=0.1為參考空間頻率;為前后輪滯后時間。
前懸架動撓度fd1和后懸架動撓度fd3表示為:
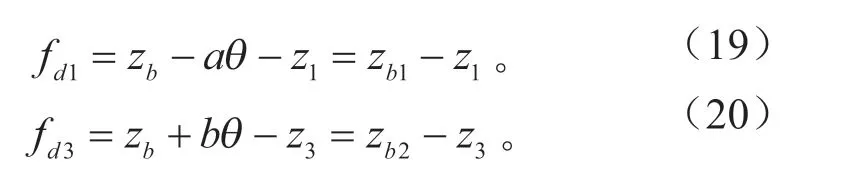
3.2 輸入和輸出的獲得
通過車輛和路面不平度系統4自由度平面模型仿真,可以獲得前后輪路面不平度和車輛響應。由于前后輪路面不平度僅差一個前后輪滯后時間,因此,將前輪路面不平度作為識別對象,即RBF神經網絡的輸出。于是,輸入層神經元節點數n為8,代表8個響應。輸出層神經元節點數m為1,代表前輪路面不平度。
采用某汽車參數,取常用路面等級B級,常用車速60 km/h,仿真時間為21.6 s,采樣間隔為0.01 s,仿真時間為20 s,采樣點為0.01 s。因此,仿真路段總長為360 m,采樣間隔為167 mm,介于150~200 mm之間,符合實際的采樣間隔,采樣點數為2160個。
將前240 m的1440個點的前輪路面不平度作為訓練集輸出,將后120 m的720個點的前輪路面不平度作為測試集的輸出,確定RBF神經網絡識別的效果。
3.3 路面不平度識別
依據正交表L32(231)確定32個輸入方案的水平,通過仿真獲得路面不平度和車輛響應。
采用RBF神經網絡,基于車輛響應對路面不平度進行識別,取5次平均值。限于篇幅,僅給出32個方案的評價指標,見表2。對于相關系數R和均方根誤差RMSE,8個因素各水平均值的結果,見表3。方差分析結果,見表4。
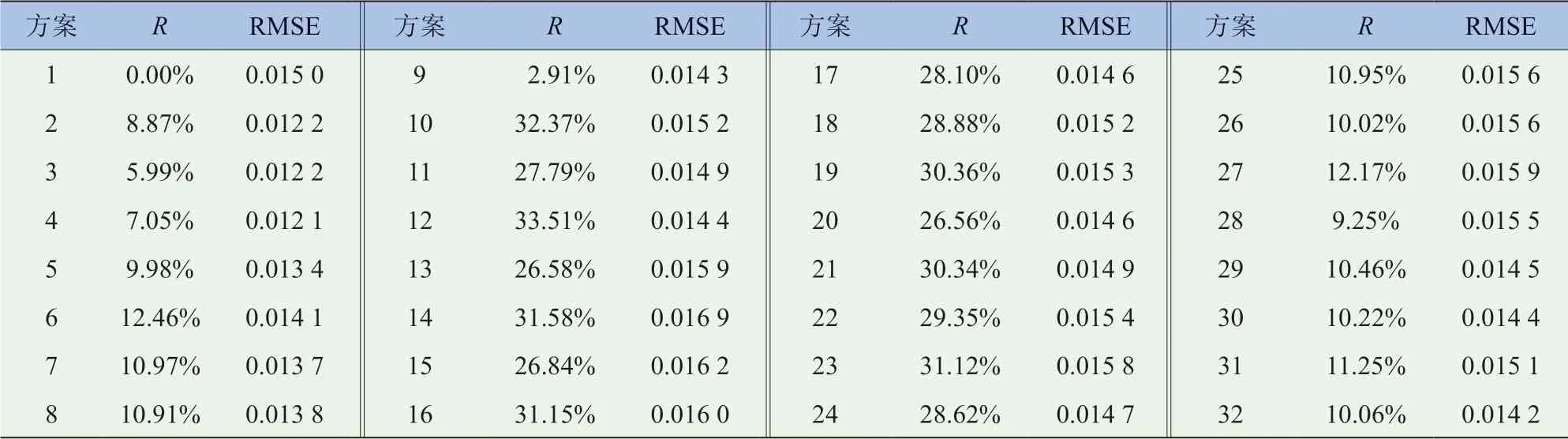
表2 RBF神經網絡正交試驗設計的評價指標
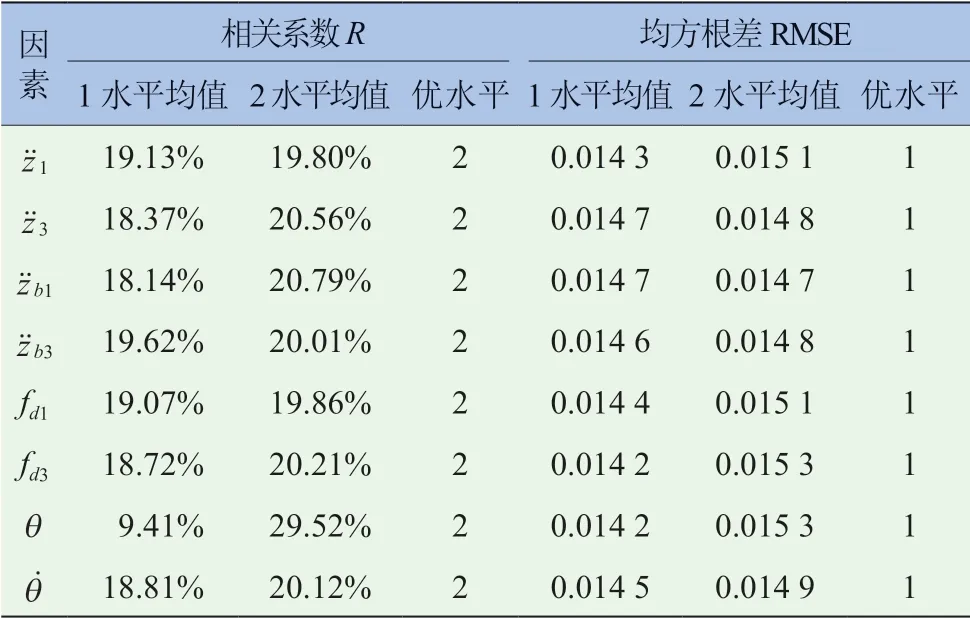
表3 RBF神經網絡正交試驗設計水平均值
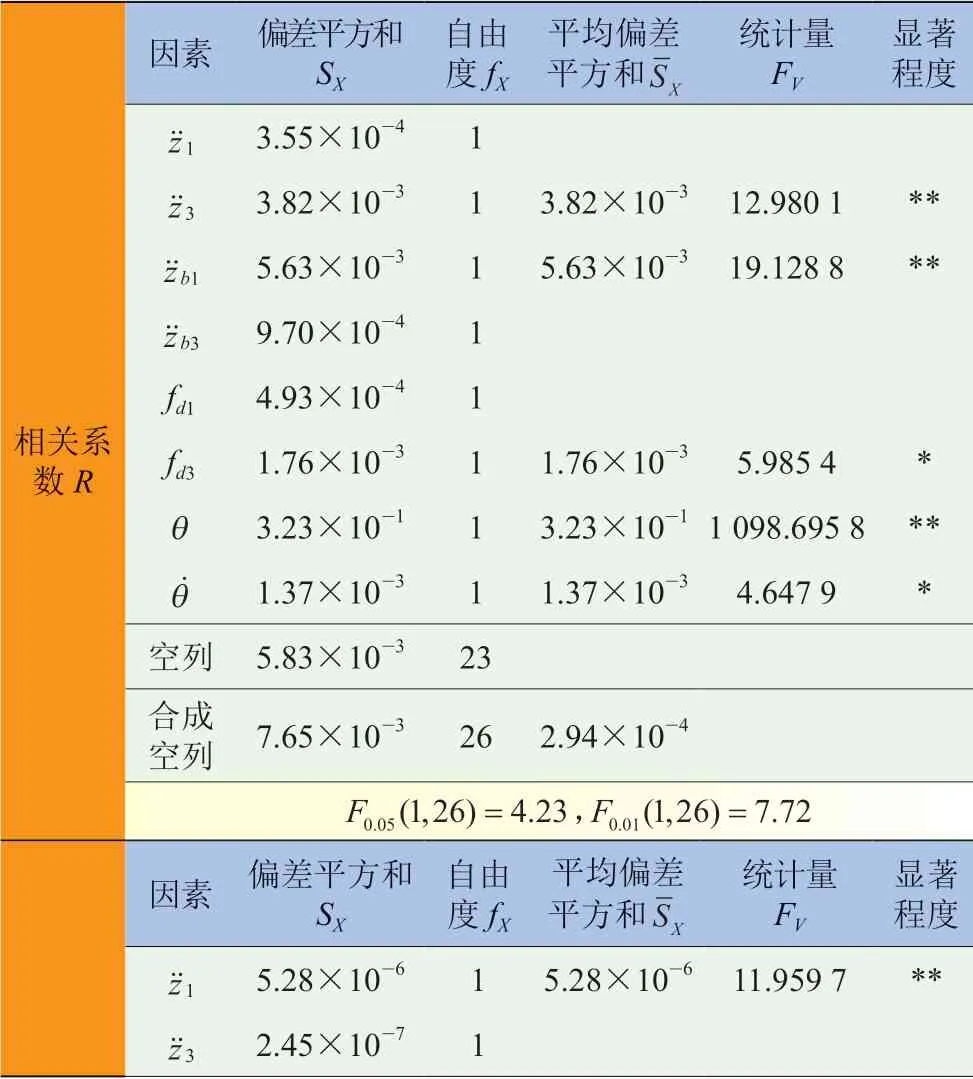
表4 RBF神經網絡識別結果方差分析
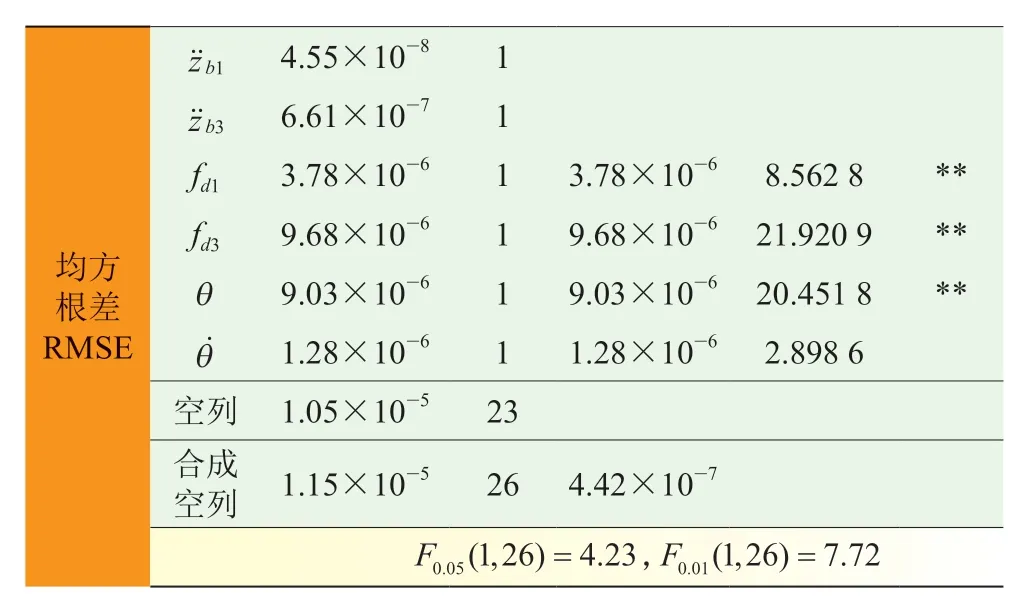
均方根差RMSE ˙˙zb1 4.55×10-8 1 ˙˙zb3 6.61×10-7 1 fd1 3.78×10-6 1 3.78×10-6 8.5628 **fd3 9.68×10-6 1 9.68×10-6 21.9209 **˙θ 9.03×10-6 1 9.03×10-6 20.4518 **˙θ 1.28×10-6 1 1.28×10-6 2.8986空列 1.05×10-5 23合成空列 1.15×10-5 26 4.42×10-7 F005126 423.(, )= .,F001126 772.(, )= .
由表2可知,所有識別結果的相關系數R均在40%以內,為弱相關程度;方案12相關系數R最高,方案4的均方根誤差RMSE最小,但是相關系數R較低。因此,進行因素水平的選擇時要兼顧兩個評價指標,使相關系數R盡可能大,均方根誤差RMSE盡可能小。
由表3可知,對于相關系數R和均方根誤差RMSE,所有響應的優水平均是矛盾的車輛響應,如果一起考慮就失去意義,需要結合方差分析確定每一個車輛響應對于兩個評價指標的顯著程度。
由表4還 可知,fd1、fd3和對 均 方 根 誤 差RMSE的顯著程度高于相關系數R的顯著程度,結合表3,優先考慮均方根誤差RMSE的優水平1,即不作為輸入數據;和對均方根誤差的顯著程度低于相關系數的顯著程度,結合表3,優先考慮相關系數的優水平2,即作為輸入數據;˙˙zb13既不是均方根誤差的顯著因素也不是相關系數的顯著因素,可以不予以考慮。
比較原方案4、原方案12和優水平方案,原方案4相關系數太低,原方案12均方根誤差又太大,綜合考慮后確定優水平方案為最優輸入方案。采用這個輸入方案,識別路面不平度及其功率譜密度,如圖3所示。
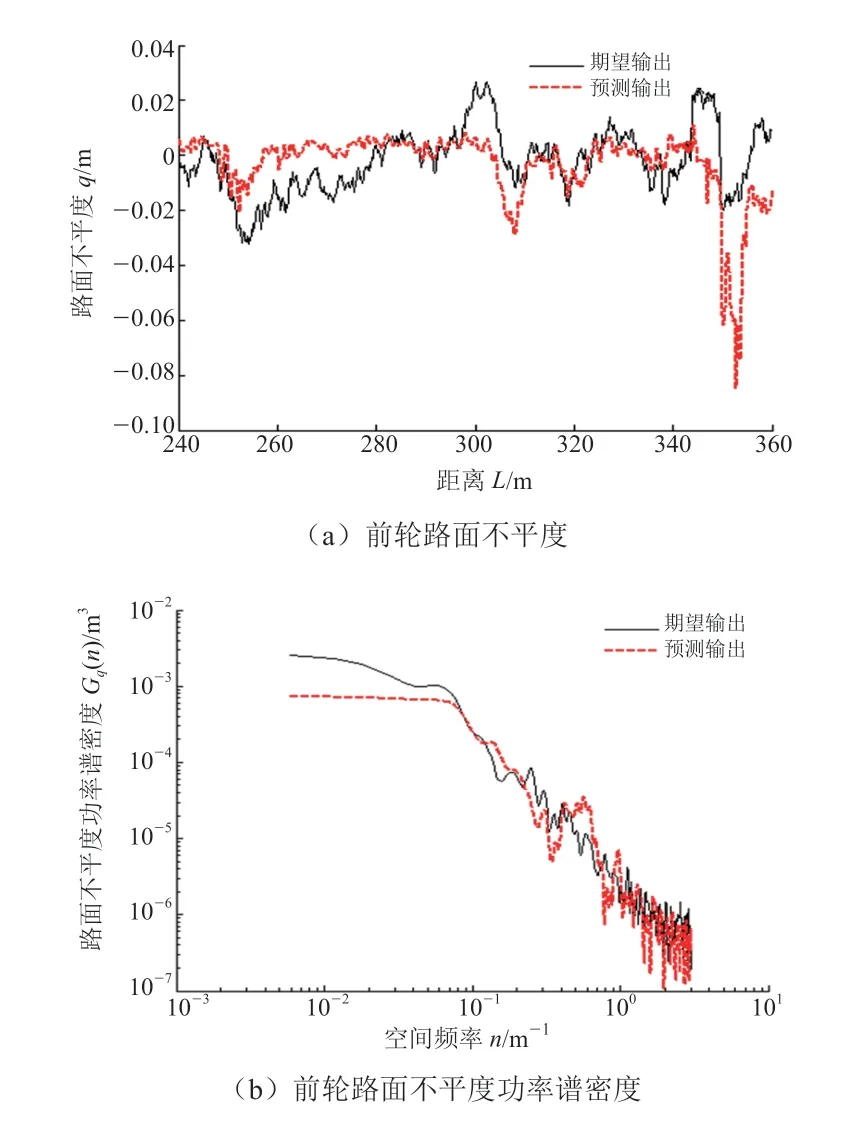
圖3 前輪路面不平度及其功率譜密度的預測與期望輸出
由圖3可知,識別的前輪路面不平度(預測輸出)與理想的路面不平度(期望輸出)吻合有一定差別,功率譜密度吻合程度也有一定差別。由此說明,如果只是簡單地應用RBF神經網絡識別路面不平度,不對識別效果進行定量評價,既不能說明RBF神經網絡的可用性,也不能保證RBF神經網絡識別路面不平度的有效性。
4 結論
為了更好地應用RBF神經網絡識別路面不平度,提出了識別路面不平度存在的輸入選擇、輸入方案確定和識別效果評價3個問題。
針對這3個問題,對RBF神經網絡和訓練過程進行了總結,建立了車輛和路面不平度系統4自由度平面模型,通過仿真得到了前后輪路面不平度和車輛響應。基于以車輛可以測試的車輛響應作為RBF神經網絡輸入的準則,引入正交試驗設計解決了RBF神經網絡車輛響應輸入方案和最優方案確定的問題,采用相關系數和均方根誤差解決了RBF神經網絡識別效果評價問題。
對某汽車在常用路面等級和常用車速行駛情況下的前輪路面不平度識別進行了研究,結果表明,提出的解決RBF神經網絡識別路面不平度3個問題的方法是可行的,既可以用于RBF神經網絡,也可以用于其它神經網絡。另一方面,針對選定的某汽車,對其應用RBF神經網絡識別路面不平度,無法達到在實際車輛上應用的目標,需要引入其它常用神經網絡進行分析和比較,找到適于該汽車的最優神經網絡,這將成為今后的研究方向。總之,本文的研究結果為后續尋找最優神經網絡和實際應用神經網絡識別路面不平度提供了前期的理論和方法基礎。
