汽車電子液壓主動(dòng)制動(dòng)系統(tǒng)和控制算法
2019-04-07 02:36:56王陸林劉貴如
汽車工程學(xué)報(bào) 2019年3期
關(guān)鍵詞:系統(tǒng)
王陸林,劉貴如
(1.奇瑞汽車股份有限公司 前瞻技術(shù)研究院,安徽,蕪湖 241006;2.安徽工程大學(xué) 計(jì)算機(jī)與信息學(xué)院,安徽,蕪湖 241000)
隨著車輛先進(jìn)駕駛輔助系統(tǒng)和智能車技術(shù)的快速發(fā)展,對(duì)制動(dòng)系統(tǒng)提出了新的需求,如自適應(yīng)巡航系統(tǒng)、自動(dòng)啟停系統(tǒng)、自動(dòng)緊急制動(dòng)以及智能駕駛系統(tǒng)均需要主動(dòng)制動(dòng)。目前針對(duì)主動(dòng)制動(dòng)系統(tǒng)的研發(fā)主要分為兩大類:第一類基于傳統(tǒng)真空助力器的改進(jìn),模擬人工制動(dòng)過程,實(shí)現(xiàn)主動(dòng)制動(dòng)。具有代表性的有集成式電子真空助力器,王建強(qiáng)等對(duì)原真空助力器進(jìn)行了改進(jìn),增加了電磁鐵和套管對(duì)真空閥和大氣閥進(jìn)行控制,實(shí)現(xiàn)主動(dòng)助力制動(dòng)[1-4]。李文惠等[5]采用兩位三通電磁閥間接控制真空腔、工作腔和大氣之間的通斷,實(shí)現(xiàn)主動(dòng)助力制動(dòng)。第二類是不借助于原車助力器,通過另外增加主動(dòng)增壓裝置實(shí)現(xiàn)主動(dòng)制動(dòng)。主動(dòng)增壓裝置的實(shí)現(xiàn)方式主要包括兩種:第一種是電子液壓增壓,通過在制動(dòng)主缸與ABS或ESP雙輸入管路上串聯(lián)或者并聯(lián)增壓裝置,原液壓制動(dòng)系統(tǒng)仍然保留,在主動(dòng)制動(dòng)系統(tǒng)失效的情況下,仍然能夠?qū)嵤┤斯ぶ苿?dòng)。這種方式采用了較成熟的電子液壓控制,可以實(shí)現(xiàn)壓力的精確調(diào)節(jié),可靠性高,但是保壓時(shí)需要給相關(guān)電磁閥通電,文獻(xiàn)[6]~[17]分別給出了典型的實(shí)現(xiàn)方案。第二種方式是電子機(jī)械增壓裝置,直接作用于液壓主缸或者輪缸,文獻(xiàn)[18]~[23]分別給出了典型的實(shí)現(xiàn)方案,該類方案由于電子機(jī)械增壓裝置實(shí)現(xiàn)精確控制難度大、可靠性差、成本高,還可能存在結(jié)構(gòu)鎖死失效的問題,保壓時(shí)也需要給電機(jī)通電。以上兩種主動(dòng)制動(dòng)方案由于電磁閥或者電機(jī)長時(shí)間持續(xù)工作發(fā)熱,容易燒壞,所以無法實(shí)現(xiàn)長時(shí)間持續(xù)制動(dòng)和保壓來滿足極端工況下的持續(xù)制動(dòng)和電子駐車制動(dòng)需求。
此外,在制動(dòng)控制算法方面,制動(dòng)力控制大多數(shù)采用壓力閉環(huán)反饋,控制過程復(fù)雜[9-12]。在制動(dòng)避撞過程中,均采用安全距離模型估計(jì)制動(dòng)干預(yù)距離并實(shí)施制動(dòng)[11]。在實(shí)際車輛運(yùn)行工況下,由于行駛路面以及車輛制動(dòng)系統(tǒng)性能方面的差異,導(dǎo)致最小安全跟車距離有時(shí)偏大或者偏小,既無法保證行車安全性,也不利于提高道路行車效率。
本文僅針對(duì)目前電子液壓主動(dòng)制動(dòng)方案以及控制算法存在的不足,提出了改進(jìn)的電子液壓主動(dòng)制動(dòng)系統(tǒng)和控制算法,保留了原車雙管路安全設(shè)計(jì),將原常開減壓閥替換為常閉減壓閥,同時(shí)增加了自鎖電磁閥,實(shí)現(xiàn)了任意時(shí)間保壓。控制算法部分引入了預(yù)制動(dòng),結(jié)合雙路增壓和高壓儲(chǔ)能器,縮短了系統(tǒng)建壓和減速度響應(yīng)時(shí)間,通過基于距離和減速度的雙閉環(huán)最小安全跟車距離控制算法,保證了制動(dòng)的平順性、行車安全性以及道路行車效率。
1 典型的電子液壓主動(dòng)制動(dòng)系統(tǒng)
在原車液壓制動(dòng)主缸和ABS或ESP之間連接的雙路液壓管路上增加梭閥,同時(shí)并聯(lián)一路或者兩路液壓增壓裝置實(shí)現(xiàn)主動(dòng)制動(dòng),該方案通過梭閥能夠?qū)崿F(xiàn)在人工制動(dòng)和主動(dòng)制動(dòng)模式之間自動(dòng)切換。當(dāng)工作在主動(dòng)制動(dòng)模式時(shí),梭閥在主動(dòng)增壓管路的壓力下滑向原車制動(dòng)主缸管路端,常閉增壓閥和常開減壓閥與原車ABS或ESP的雙輸入管路通過梭閥進(jìn)行連接[6]。當(dāng)工作在人工制動(dòng)模式時(shí),梭閥在制動(dòng)主缸液壓的壓力下滑向主動(dòng)增壓管路端,制動(dòng)主缸和原車ABS或ESP雙輸入管路連通,子缸中的油液在人工和真空助力的作用下直接進(jìn)入ABS或ESP管路,實(shí)現(xiàn)人工制動(dòng)。文獻(xiàn)[6]~[7]采用的就是這種方案,其典型結(jié)構(gòu)及原理如圖1所示,保留了原液壓制動(dòng)系統(tǒng)ABS/ESC功能,只需開發(fā)主動(dòng)增壓和壓力調(diào)節(jié)部分,工程化應(yīng)用開發(fā)難度低。液壓增壓部分由直流無刷電機(jī)驅(qū)動(dòng)液壓油泵將制動(dòng)液從主缸(或者油箱)泵到高壓儲(chǔ)能器中,中間連接的單向閥用于防止油液回流。為了縮短制動(dòng)響應(yīng)時(shí)間,系統(tǒng)需要預(yù)建壓,保證儲(chǔ)能器內(nèi)液壓保持一定的壓力,液壓壓力傳感器用于液壓力反饋,同時(shí)溢流閥也能夠?qū)⒁簤毫刂圃谝欢ǚ秶鷥?nèi),防止過壓損壞或者壓力過大導(dǎo)致油液泄露[7]。壓力調(diào)節(jié)部分主要由兩個(gè)高速開關(guān)閥組成,增壓閥為常閉高速開關(guān)閥,減壓閥為常開高速開關(guān)閥,增壓閥連接壓力源(高壓儲(chǔ)能器)和壓力輸出管路,減壓閥連接壓力輸出管路和油箱。增壓和減壓閥通過PWM進(jìn)行控制,通過調(diào)節(jié)PWM的占空比調(diào)節(jié)閥門的開啟時(shí)間[8]。當(dāng)需要增壓時(shí),增加增壓閥的開啟時(shí)間;當(dāng)需要減壓時(shí),增加減壓閥的開啟時(shí)間。通過控制增壓閥和減壓閥的開啟時(shí)間就可以實(shí)現(xiàn)對(duì)輸出壓力的調(diào)節(jié)和控制。
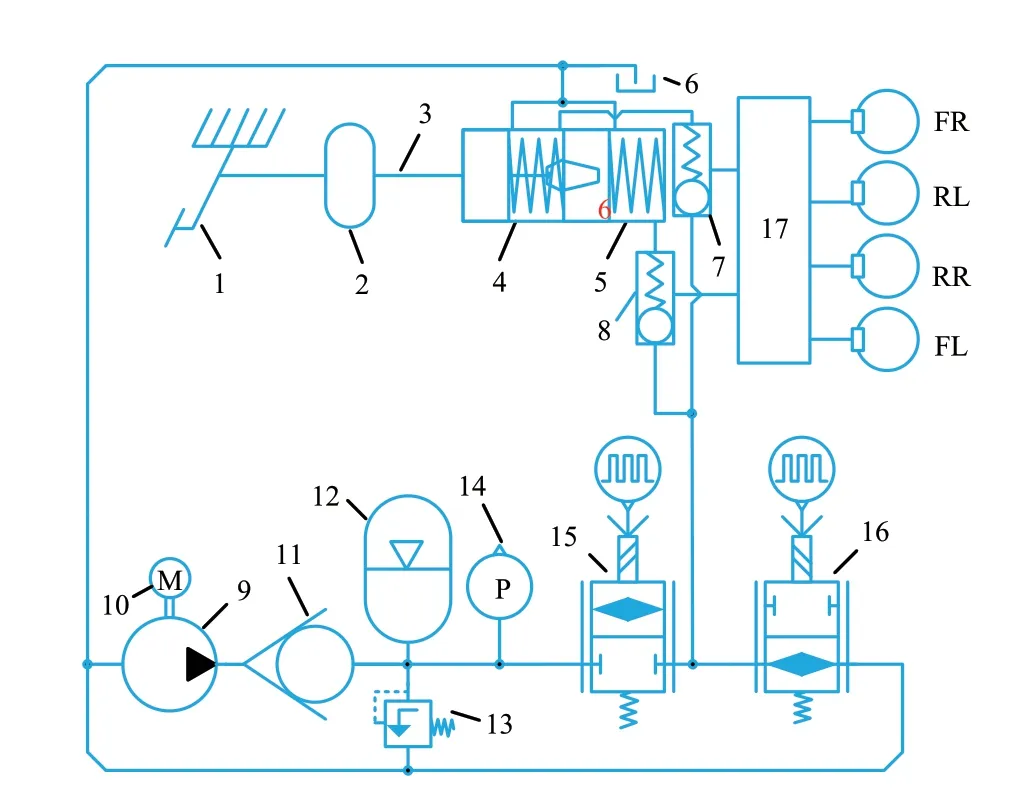
圖1 典型電子液壓主動(dòng)制動(dòng)系統(tǒng)結(jié)構(gòu)
當(dāng)主動(dòng)制動(dòng)處于增壓階段時(shí),常閉增壓閥開啟,常開減壓閥關(guān)閉,液壓泵產(chǎn)生的壓力源經(jīng)過增壓閥進(jìn)入ABS或ESP雙路輸入管實(shí)現(xiàn)增壓。當(dāng)主動(dòng)制動(dòng)處于減壓階段時(shí),常閉增壓閥關(guān)閉,常開減壓閥開啟,使管路油液可以通過減壓常開閥回流到主缸進(jìn)行減壓,減壓過程中可以通過調(diào)節(jié)控制常開閥的PWM占空比調(diào)節(jié)常開閥的開啟時(shí)間。當(dāng)需要保壓時(shí),常閉增壓閥關(guān)閉,常開減壓閥關(guān)閉[9-10],兩路常開閥關(guān)閉實(shí)現(xiàn)管路壓力保持。
該方案面向從事ADAS系統(tǒng)和智能車研發(fā)的科研機(jī)構(gòu)和整車企業(yè)以及IT企業(yè),在不具備ABS或ESP開發(fā)能力或者不計(jì)劃投入資金重新開發(fā)制動(dòng)系統(tǒng)的情況下,保留原車ABS或ESP系統(tǒng),在制動(dòng)主缸和ABS或ESP之間的雙輸入管路上并聯(lián)或者串聯(lián)電子液壓增壓裝置,實(shí)現(xiàn)線控電液主動(dòng)制動(dòng),是一種最佳實(shí)現(xiàn)方案。可以提供主動(dòng)制動(dòng)和人工制動(dòng)兩種模式,但是也存在以下缺點(diǎn):(1)ABS/ESP雙管路共用一路增壓管路即一個(gè)增壓閥,會(huì)導(dǎo)致管路建壓和減壓時(shí)間延長,同時(shí)也破壞了主動(dòng)制動(dòng)時(shí)兩路管路的獨(dú)立安全設(shè)計(jì)。(2)梭閥存在漏油或者減壓時(shí)滾珠位置無法預(yù)測的風(fēng)險(xiǎn)。(3)減壓閥采用常開閥雖然能夠保證制動(dòng)結(jié)束后,制動(dòng)輪缸液壓力完全釋放以及人工制動(dòng)的有效性,但是在主動(dòng)制動(dòng)模式下,需要給常開減壓閥通電才能保壓,如果需要長時(shí)間保壓將會(huì)導(dǎo)致電磁閥過熱燒壞,無法滿足極端工況下的長時(shí)間制動(dòng)需求。
2 改進(jìn)的電子液壓主動(dòng)制動(dòng)系統(tǒng)
在目前的并聯(lián)式電子液壓主動(dòng)制動(dòng)系統(tǒng)(圖1)的基礎(chǔ)上,提出了一種改進(jìn)的電子液壓主動(dòng)制動(dòng)實(shí)現(xiàn)方案。
本方案的系統(tǒng)結(jié)構(gòu)及工作原理如圖2所示。

圖2 改進(jìn)的電子液壓主動(dòng)制動(dòng)系統(tǒng)結(jié)構(gòu)
針對(duì)圖1所示的方案存在的問題,進(jìn)行了以下改進(jìn):(1)為了保留原車ABS或ESP雙路獨(dú)立的安全設(shè)計(jì),另外增加了雙路常閉高速開關(guān)增壓閥和雙路常閉高速開關(guān)減壓閥,保證了ABS或ESP雙路輸入管路的獨(dú)立性,同時(shí)也縮短了管路建壓時(shí)間。為了進(jìn)一步縮短建壓時(shí)間,保留了高壓儲(chǔ)能器。(2)取消了梭閥,在主動(dòng)制動(dòng)失效或者人工制動(dòng)時(shí),可以通過增加的兩路常閉減壓閥通電開啟以及將增加的自鎖電磁閥開啟,保證主缸和ABS或ESP雙輸入管路的暢通,克服了采用梭閥帶來的風(fēng)險(xiǎn)。(3)將常開減壓閥替換為常閉減壓閥,這樣當(dāng)主動(dòng)制動(dòng)系統(tǒng)需要長時(shí)間保壓時(shí)(常閉增壓閥關(guān)閉),可以通過給常閉減壓閥斷電實(shí)現(xiàn)任意長時(shí)間保壓,克服了圖1所示的典型方案中常開減壓閥需要上電保壓,持續(xù)時(shí)間較短的問題。但是本方案采用常閉減壓閥導(dǎo)致了兩個(gè)新的問題:(1)制動(dòng)結(jié)束后,主缸制動(dòng)液壓力無法完全釋放。(2)人工制動(dòng)模式下,主缸和ABS或ESP之間兩輸入管路由于常閉減壓閥無法長時(shí)間通電保持導(dǎo)通,所以無法實(shí)現(xiàn)人工制動(dòng)。通過給兩個(gè)常閉減壓閥分別并聯(lián)一個(gè)帶自鎖功能的電磁閥(下文簡稱自鎖電磁閥),該自鎖電磁閥能夠在掉電情況下保持開啟,主缸和ABS或ESP之間雙輸入管路導(dǎo)通,從而保證主缸液壓壓力完全釋放和人工制動(dòng)的有效性,解決了以上兩個(gè)問題。
自鎖電磁閥在常閉閥的基礎(chǔ)上增加了電控自鎖機(jī)構(gòu),其工作狀態(tài)及原理如圖3所示。
自鎖電磁閥的開啟過程為:給自鎖機(jī)構(gòu)線圈通電,在磁力的吸合下,磁芯處于吸起狀態(tài),自鎖機(jī)構(gòu)解鎖,然后給電磁閥通電并保持短時(shí)開啟狀態(tài)(開啟時(shí)間小于100 ms),如圖3a所示。然后給自鎖機(jī)構(gòu)線圈掉電,磁芯在彈簧力的作用下處于自鎖狀態(tài)后,再給電磁閥掉電,由于自鎖機(jī)構(gòu)的限位作用,閥芯在電磁閥線圈掉電的情況下也無法在電磁閥復(fù)位彈簧的作用下復(fù)位,即在掉電的情況下,仍然能夠保持閥門處于開啟狀態(tài),如圖3b所示。
自鎖電磁閥的關(guān)閉過程為:先給電磁閥線圈通電,使閥芯被吸合,保證自鎖機(jī)構(gòu)的磁芯銷和閥芯之間無摩擦,然后再給自鎖機(jī)構(gòu)線圈通電,自鎖機(jī)構(gòu)處于解鎖狀態(tài),如圖3a所示。電磁閥線圈掉電,閥芯在電磁閥復(fù)位彈簧的作用下自動(dòng)復(fù)位到關(guān)閉狀態(tài),如圖3c所示。然后自鎖機(jī)構(gòu)線圈掉電,如圖3d所示。
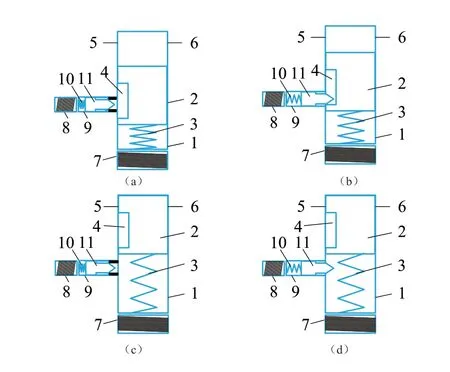
圖3 自鎖電磁閥的4種工作狀態(tài)
當(dāng)系統(tǒng)進(jìn)入主動(dòng)制動(dòng)模式時(shí),兩個(gè)常閉高速開關(guān)增壓閥開啟,兩個(gè)常閉高速開關(guān)減壓閥和自鎖電磁閥均關(guān)閉。高壓儲(chǔ)能器的高壓油液瞬間通過增壓閥進(jìn)入ABS或ESP雙輸入管路,產(chǎn)生制動(dòng)力。當(dāng)在主動(dòng)制動(dòng)過程中,本系統(tǒng)接收到上層控制算法發(fā)出的人工制動(dòng)請(qǐng)求或者捕獲到人工踩踏了制動(dòng)踏板時(shí),系統(tǒng)自動(dòng)從主動(dòng)制動(dòng)模式切換到人工制動(dòng)模式。切換過程為:兩個(gè)常閉高速開關(guān)增壓閥和減壓閥均關(guān)閉,自鎖電磁閥開啟,制動(dòng)主缸和ABS或ESP雙路輸入管路連通,子缸中的油液在人工和真空助力的作用下直接進(jìn)入ABS或ESP管路,實(shí)現(xiàn)人工制動(dòng)。
當(dāng)主動(dòng)制動(dòng)失效的情況下,系統(tǒng)可以通過兩種冗余的方式自動(dòng)切換到人工制動(dòng)模式:(1)將常閉減壓閥通電開啟(人工制動(dòng)在設(shè)定時(shí)間內(nèi)有效)。(2)將并聯(lián)的兩個(gè)自鎖電磁閥開啟(人工制動(dòng)持續(xù)有效)。兩種冗余方案均能夠保證在主動(dòng)制動(dòng)失效的情況下,人工制動(dòng)的有效性。
本方案沒有將常開增壓閥直接替換為自鎖電磁閥,避免了自鎖機(jī)構(gòu)線圈在自鎖電磁閥高速開關(guān)工作過程中持續(xù)通電可能燒壞而帶來的風(fēng)險(xiǎn)。
自鎖電磁閥目前也有成熟產(chǎn)品,如果性價(jià)比高,且能滿足本方案的需求,可以直接采用,本文只給出了一種原理示意圖。電磁鐵的控制也比較簡單,只有兩種狀態(tài),置位和復(fù)位,只需要配合電磁閥實(shí)現(xiàn)自鎖保持即可。此外,鑒于該方案具有掉電制動(dòng)保壓功能,所以該方案還可以實(shí)現(xiàn)電子駐車功能,包括坡道起步輔助以及自動(dòng)駐車。
3 儲(chǔ)能器建壓和主動(dòng)制動(dòng)控制算法
針對(duì)目前電子液壓主動(dòng)制動(dòng)系統(tǒng)控制算法自身以及在工程應(yīng)用中存在的不足,提出了系統(tǒng)高壓儲(chǔ)能器建壓控制算法和系統(tǒng)應(yīng)用中實(shí)施主動(dòng)制動(dòng)的控制算法,并進(jìn)行了實(shí)際應(yīng)用測試和驗(yàn)證。
3.1 儲(chǔ)能器建壓控制算法
本系統(tǒng)采用儲(chǔ)能器提前建壓,縮短了系統(tǒng)建壓時(shí)間。當(dāng)需要制動(dòng)時(shí),儲(chǔ)存的能量迅速釋放,瞬間產(chǎn)生制動(dòng)力[9]。目前大多數(shù)主動(dòng)制動(dòng)系統(tǒng),儲(chǔ)能器的建壓采用純液壓壓力閉環(huán)進(jìn)行建壓控制[24]。該方法雖然能夠準(zhǔn)確控制目標(biāo)壓力值,但是控制過程復(fù)雜,再加上液壓力平衡的滯后性和不穩(wěn)定性,導(dǎo)致調(diào)壓周期長,容易出現(xiàn)振蕩[25],實(shí)時(shí)性差,尤其在需要持續(xù)制動(dòng)的應(yīng)用場景中,無法及時(shí)迅速地補(bǔ)給儲(chǔ)蓄的液壓能量,導(dǎo)致制動(dòng)系統(tǒng)響應(yīng)時(shí)間較長。針對(duì)當(dāng)前控制算法的不足,以及高壓儲(chǔ)能器并非目標(biāo)壓力,控制在一定范圍內(nèi),不需要特別精確的特性,提出了目標(biāo)壓力預(yù)估和壓力反饋相結(jié)合的儲(chǔ)能器建壓控制算法。目標(biāo)液壓壓力預(yù)估方法包括持續(xù)工作時(shí)間估計(jì)法和液壓泵電機(jī)旋轉(zhuǎn)圈數(shù)估計(jì)法。根據(jù)估計(jì)參數(shù)控制電機(jī),使高壓儲(chǔ)能器內(nèi)液壓壓力達(dá)到預(yù)設(shè)的目標(biāo)工作壓力,在控制過程中,通過液壓壓力傳感器實(shí)時(shí)反饋并監(jiān)控建壓情況,接近目標(biāo)壓力區(qū)域時(shí),停止建壓。假設(shè)V為儲(chǔ)能器的工作容積,能夠滿足一次制動(dòng)所需要的制動(dòng)液容積;Q為液壓泵單位時(shí)間內(nèi)的工作流量,則液壓泵電機(jī)持續(xù)工作時(shí)間t的計(jì)算公式為[12]:

其中V和Q的計(jì)算公式為[12]:
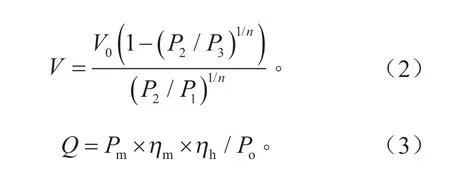
式中:V0為儲(chǔ)能器的公稱容積;P1為充氣壓力;P2為儲(chǔ)能器最低工作壓力;P3為儲(chǔ)能器最高工作壓力;n為恒溫指數(shù);Pm為泵電機(jī)的額定功率;ηm為泵電機(jī)的效率;ηh為液壓泵的效率;Po為目標(biāo)管路壓力。
假設(shè)D為液壓泵的排量,rm為泵電機(jī)的平均轉(zhuǎn)速,則t還可以通過以下公式計(jì)算:
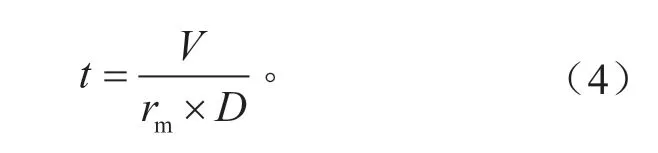
通過式(1)或式(4)可以大致估計(jì)得到液壓泵持續(xù)工作時(shí)間,通過控制電機(jī)的持續(xù)工作時(shí)間,并根據(jù)儲(chǔ)能器液壓力傳感器的實(shí)時(shí)反饋,進(jìn)行液壓力控制,控制模型如圖4所示,其中P為壓力反饋值。
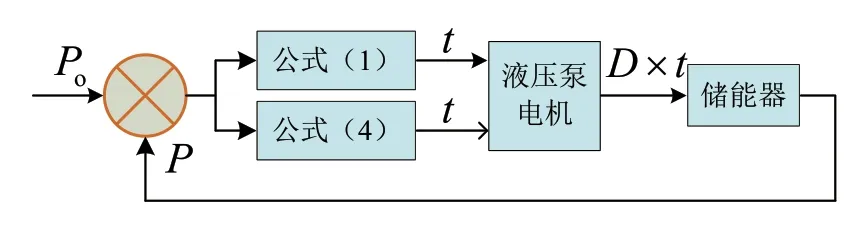
圖4 基于電機(jī)工作時(shí)間的儲(chǔ)能器建壓控制模型
假設(shè)nm為電機(jī)持續(xù)工作時(shí)間內(nèi)的轉(zhuǎn)動(dòng)圈數(shù),則nm的計(jì)算公式為:

通過式(5)可以計(jì)算出電機(jī)轉(zhuǎn)動(dòng)圈數(shù),并通過電機(jī)編碼器進(jìn)行計(jì)數(shù),控制儲(chǔ)能器的目標(biāo)壓力,同時(shí)根據(jù)儲(chǔ)能器液壓力傳感器實(shí)時(shí)反饋值P進(jìn)行液壓力控制[13],控制模型如圖5所示。
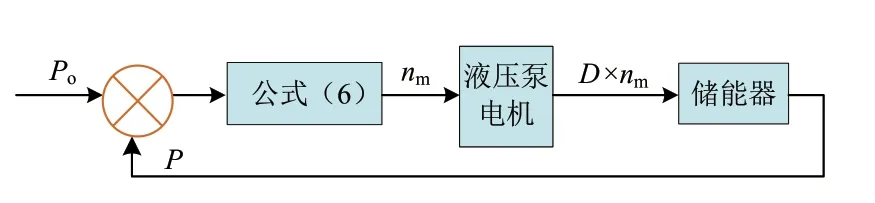
圖5 基于電機(jī)轉(zhuǎn)動(dòng)圈數(shù)的儲(chǔ)能器建壓控制模型
儲(chǔ)能器建壓控制流程如圖6所示,S為設(shè)定的壓力狀態(tài)改變門限值。
當(dāng)反饋壓力大于目標(biāo)壓力或者差值小于S時(shí),狀態(tài)保持,否則進(jìn)入建壓狀態(tài)[14]。
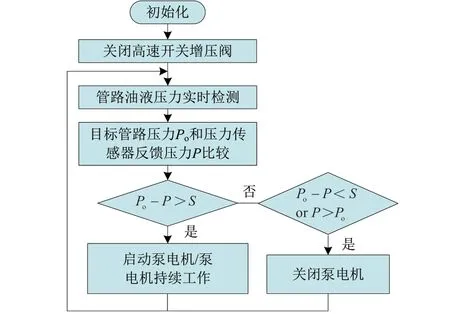
圖6 儲(chǔ)能器建壓控制算法流程圖
3.2 主動(dòng)制動(dòng)控制算法
目前大多數(shù)的主動(dòng)制動(dòng)系統(tǒng)控制算法僅包括管路液壓壓力控制算法,即根據(jù)上層控制算法提出的目標(biāo)液壓壓力進(jìn)行壓力閉環(huán)控制,與上層控制算法如避撞算法沒有更多的交互,彼此隔離。壓力閉環(huán)控制導(dǎo)致壓力控制過程復(fù)雜,響應(yīng)時(shí)間長,所以在實(shí)際應(yīng)用過程中很難得到很好的減速避撞效果。
針對(duì)制動(dòng)管路液壓壓力控制,普遍通過控制增壓和減壓高速開關(guān)電磁閥的開啟時(shí)間,進(jìn)而控制進(jìn)入和流出雙管路的制動(dòng)液流量,達(dá)到調(diào)節(jié)管路壓力的目的。采用簡單的開關(guān)控制無法精確控制流量,目前普遍采用PWM信號(hào)進(jìn)行控制,PWM高電平將電磁閥開啟,制動(dòng)液在壓力差的作用下進(jìn)入主缸,PWM低電平間隙,主缸中的制動(dòng)液壓力會(huì)達(dá)到穩(wěn)定狀態(tài)。然后通過在液壓主缸或者輪缸上增壓的液壓力傳感器進(jìn)行壓力反饋,由于油液具有彈性和滯后性,壓力PID閉環(huán)控制很容易形成振蕩[11],所以液壓壓力閉環(huán)控制過程復(fù)雜而不實(shí)用,并且響應(yīng)慢。駕駛員在實(shí)際制動(dòng)過程中并不關(guān)注主缸或管路液壓壓力,而是通過控制車輛的制動(dòng)減速度和目測與前方障礙物的相對(duì)距離,不斷調(diào)節(jié)踩踏制動(dòng)踏板的力,控制車輛的制動(dòng)減速度,從而實(shí)現(xiàn)最小跟車距離的控制。本文借鑒以上人工制動(dòng)過程,將制動(dòng)力控制過程與避撞或跟車控制過程相結(jié)合,提出了基于減速度和最小跟車距離的雙閉環(huán)制動(dòng)控制算法。
假設(shè)Dr和vr分別為根據(jù)雷達(dá)和視覺檢測前方障礙物的相對(duì)距離(單位為m)和相對(duì)速度(單位為m/s);ab_o和ta_o分別為本車(目標(biāo))制動(dòng)減速度(單位為m/s2)和響應(yīng)時(shí)間(單位為s);ab_o為本車制動(dòng)時(shí)與前車安全距離實(shí)時(shí)估計(jì)值,m;vb為本車實(shí)時(shí)車速,m/s;ab為本車制動(dòng)減速度實(shí)時(shí)反饋值,m/s2;PWM1為控制電磁閥開啟時(shí)間的占空比;PWM2為控制泵電機(jī)運(yùn)行時(shí)間的占空比,則雙閉環(huán)制動(dòng)控制模型如圖7所示。
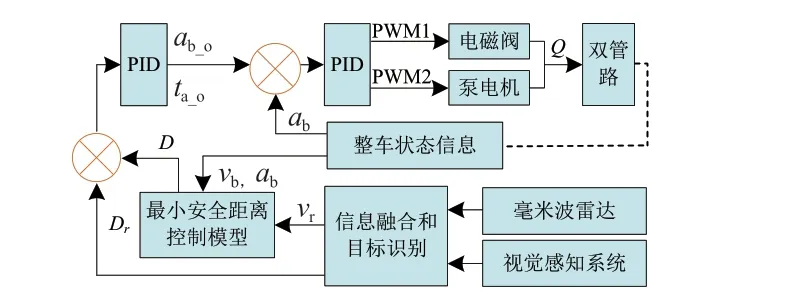
圖7 基于距離和減速度的雙閉環(huán)制動(dòng)控制模型
雙閉環(huán)外環(huán)控制實(shí)現(xiàn)最小安全跟車距離的閉環(huán)控制,其控制算法運(yùn)行流程如圖8所示。
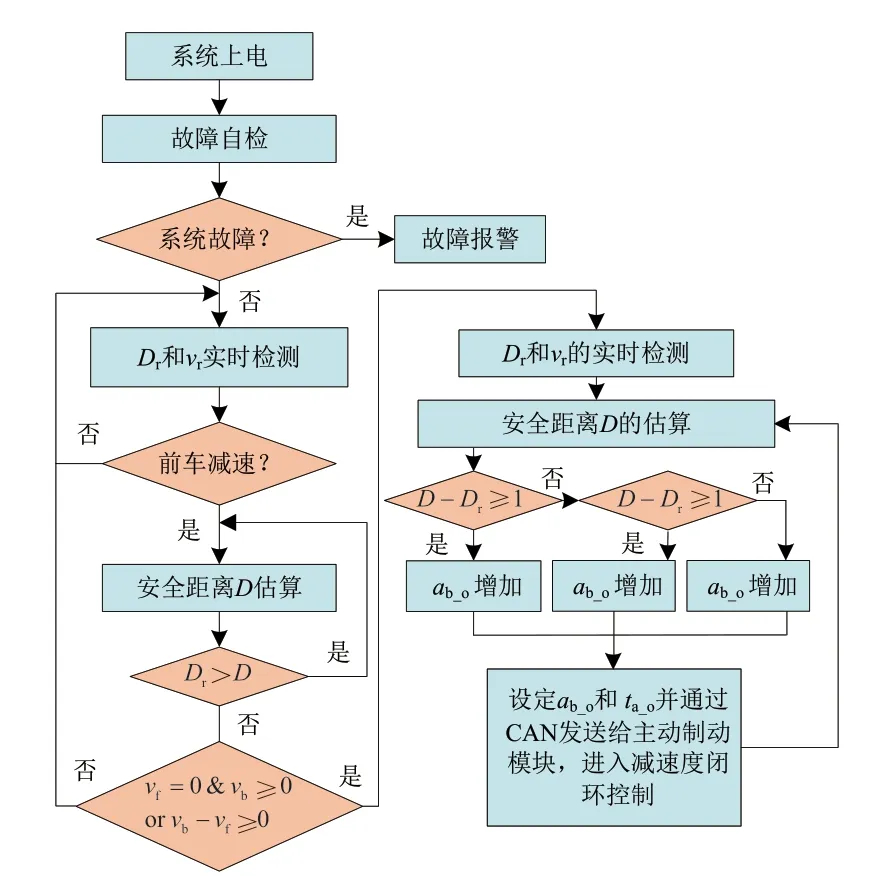
圖8 最小安全跟車距離閉環(huán)控制算法流程
假設(shè)d為本車和前車最小安全跟車距離,m。根據(jù)vr、vb和ab實(shí)時(shí)估計(jì)D,根據(jù)Dr與D的偏差,不斷調(diào)整ab_o,實(shí)現(xiàn)最小安全跟車距離的精確控制。
前車靜止工況下本車與前車最小安全跟車距離D的估計(jì)公式為:


前車減速行駛工況下本車與前車最小安全跟車距離D的估計(jì)公式為:式中:t為雷達(dá)和視覺傳感器檢測周期,s;vf為前車車速,m/s;af為前車制動(dòng)減速度,m/s2。式(6)和式(7)中相關(guān)參數(shù)初始值的確定:ab,af取值范圍為3.0~9.6 m/s2,轎車的制動(dòng)減速度典型值為5.6 m/s2;卡車的制動(dòng)減速度典型值為3.6 m/s2,d的取值范圍為1~2 m。af無法準(zhǔn)確測量也無法控制,可以根據(jù)視覺感知系統(tǒng)進(jìn)行初步判斷后預(yù)設(shè)初值。ab可測量,本文提出的控制方法主要通過動(dòng)態(tài)調(diào)節(jié)ab實(shí)現(xiàn)最小安全跟車距離d的精確控制。
雙閉環(huán)內(nèi)環(huán)控制算法實(shí)現(xiàn)制動(dòng)減速度閉環(huán)控制,其控制算法運(yùn)行流程如圖9所示。
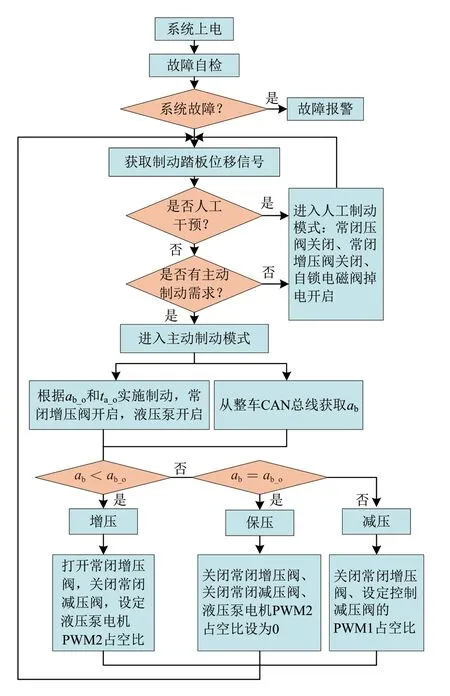
圖9 制動(dòng)減速度閉環(huán)控制算法流程
系統(tǒng)上電后,首先執(zhí)行主動(dòng)增壓,通過液壓傳感器壓力反饋值進(jìn)行故障自檢,然后通過捕獲制動(dòng)踏板位移或者開關(guān)信號(hào)判斷是否進(jìn)行了人工制動(dòng)干預(yù),如果人工干預(yù),則進(jìn)入人工制動(dòng)模式。否則循環(huán)等待直到上層發(fā)出主動(dòng)制動(dòng)請(qǐng)求,系統(tǒng)進(jìn)入主動(dòng)制動(dòng)模式,根據(jù)上層感知系統(tǒng)和控制策略算法需要的目標(biāo)制動(dòng)減速度ab_o和響應(yīng)時(shí)間ta_o進(jìn)行減速度的PID閉環(huán)控制,根據(jù)ab與ab_o的偏差以及響應(yīng)時(shí)間ta,不斷調(diào)整控制電磁閥和電機(jī)的PWM1和PWM2,調(diào)整電磁閥的開啟時(shí)間和電機(jī)的轉(zhuǎn)速/輸出轉(zhuǎn)矩,調(diào)整雙管路液壓壓力,實(shí)現(xiàn)減速度ab的精確控制。內(nèi)環(huán)和外環(huán)控制算法可以集成在制動(dòng)系統(tǒng)軟硬件平臺(tái)上運(yùn)行,也可以分開在不同的平臺(tái)上運(yùn)行,之間通過CAN或者其它通信方式進(jìn)行實(shí)時(shí)交互。
本文將應(yīng)用系統(tǒng)上層控制算法和本制動(dòng)系統(tǒng)控制算法相結(jié)合,通過最直接的減速度和最小安全跟車距離的閉環(huán)控制進(jìn)行集成融合,既取代了復(fù)雜的制動(dòng)管路液壓壓力閉環(huán)控制,降低了控制的復(fù)雜度,縮短了響應(yīng)時(shí)間,也保證了制動(dòng)的平順性和舒適性。同時(shí),通過實(shí)時(shí)調(diào)節(jié)本車制動(dòng)減速度,控制與前車的最小安全跟車距離,克服了行駛路況以及制動(dòng)系統(tǒng)性能差異導(dǎo)致制動(dòng)干預(yù)距離估計(jì)偏大或偏小的問題,實(shí)現(xiàn)了最小跟車安全距離的精確控制,既保證了行車安全性,也提高了道路行車效率。
4 驗(yàn)證與結(jié)果分析
對(duì)本系統(tǒng)儲(chǔ)能器建壓時(shí)間、儲(chǔ)能器補(bǔ)能時(shí)間、液壓管路建壓時(shí)間和壓力控制精度進(jìn)行了臺(tái)架測試。對(duì)制動(dòng)減速度響應(yīng)時(shí)間以及控制精度在干燥的一般瀝青路面上進(jìn)行了實(shí)際動(dòng)態(tài)測試。
4.1 液壓建壓時(shí)間測試與分析
本系統(tǒng)儲(chǔ)能器的工作容積V為100 ml(物理容積為30 ml),最高壓力20 MPa,液壓泵單位時(shí)間內(nèi)的工作流量Q為500 ml/s。為了避免電流過大,采用了48 V直流電機(jī),功率為150 W,實(shí)驗(yàn)室臺(tái)架測試結(jié)果如圖10所示。
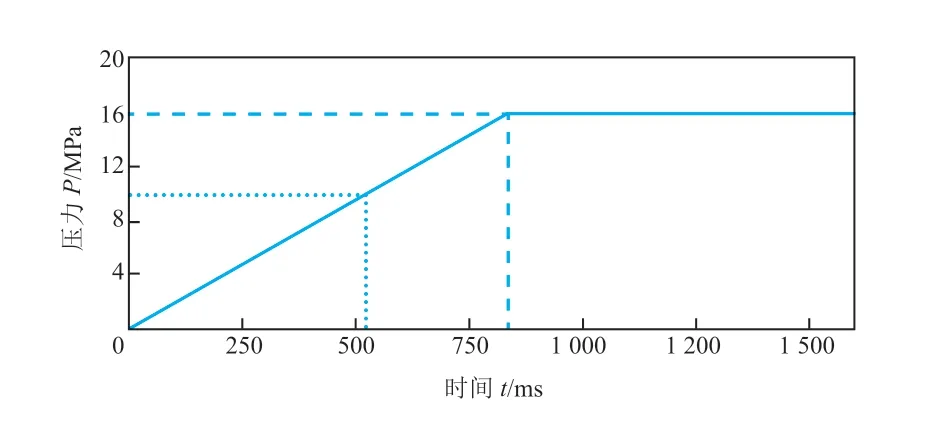
圖10 儲(chǔ)能器建壓時(shí)間響應(yīng)曲線
儲(chǔ)能器從0 MPa建壓到10 MPa和16 MPa的響應(yīng)時(shí)間為520 ms和837 ms,控制精度±0.15 MPa,壓力控制比較平穩(wěn)。儲(chǔ)能器初始建壓時(shí)間雖然較長,但是可以通過提前建壓完成,不影響制動(dòng)系統(tǒng)響應(yīng)時(shí)間。在實(shí)際工程應(yīng)用過程中,影響系統(tǒng)響應(yīng)時(shí)間的是儲(chǔ)能器能量補(bǔ)充所需時(shí)間,設(shè)定儲(chǔ)能器壓力范圍為14~16 MPa,當(dāng)壓力小于14 MPa時(shí),立即補(bǔ)充。14 MPa到16 MPa的建壓時(shí)間為106 ms,測試結(jié)果如圖11所示。補(bǔ)能時(shí)間小于液壓管路10 MPa的建壓時(shí)間170 ms(見4.2節(jié)),可以滿足制動(dòng)過程中及時(shí)補(bǔ)能的時(shí)間響應(yīng)要求,不影響系統(tǒng)持續(xù)制動(dòng)。
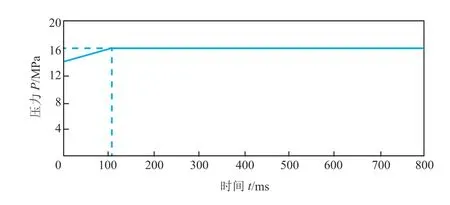
圖11 儲(chǔ)能器補(bǔ)能時(shí)間響應(yīng)曲線
4.2 制動(dòng)性能及響應(yīng)時(shí)間測試與分析
本系統(tǒng)采用壓力反饋的儲(chǔ)能器壓力閉環(huán)建壓方式進(jìn)行建壓,在實(shí)施主動(dòng)制動(dòng)時(shí),高壓儲(chǔ)能器可以大大縮短建壓時(shí)間。但是在實(shí)時(shí)制動(dòng)過程中,如果仍然采用液壓力閉環(huán)控制,則本系統(tǒng)需要不斷根據(jù)上層控制算法提出的目標(biāo)壓力進(jìn)行PID閉環(huán)調(diào)節(jié),液壓力的滯后性與壓力傳感器反饋值的誤差和不穩(wěn)定性會(huì)導(dǎo)致壓力調(diào)節(jié)易出現(xiàn)振蕩,調(diào)節(jié)過程復(fù)雜,并且耗時(shí)較長。本文根據(jù)實(shí)際工程需要,提出了基于車距和減速度雙閉環(huán)控制的最小安全跟車距離控制算法,和上層控制算法之間通過目標(biāo)減速度和響應(yīng)時(shí)間進(jìn)行交互。本系統(tǒng)結(jié)合前方障礙物檢測雷達(dá)傳感器和視覺傳感器,在進(jìn)行預(yù)警干預(yù)時(shí),提前實(shí)施預(yù)制動(dòng),同時(shí)結(jié)合高壓儲(chǔ)能器,大大縮短了制動(dòng)管路壓力。假設(shè)測試臺(tái)架管路壓力用Pg表示(測試臺(tái)架為了測試管路10 MPa的建壓時(shí)間,加裝了壓力傳感器),臺(tái)架測試結(jié)果如圖12所示,達(dá)到10 MPa制動(dòng)管路壓力的響應(yīng)時(shí)間約170 ms,能夠滿足緊急制動(dòng)要求。
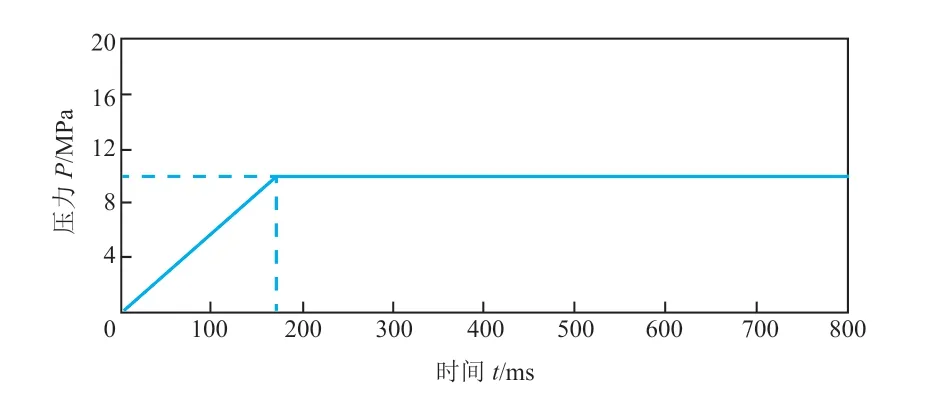
圖12 制動(dòng)管路建壓時(shí)間響應(yīng)曲線
本系統(tǒng)在實(shí)際裝車和工程應(yīng)用時(shí),取消管路液壓壓力傳感器,采用更直接的制動(dòng)減速度閉環(huán)控制取代復(fù)雜的管路液壓壓力閉環(huán)控制。在干燥的一般瀝青路面上對(duì)本制動(dòng)系統(tǒng)及其控制算法進(jìn)行了實(shí)車動(dòng)態(tài)測試,結(jié)果如圖13所示。
達(dá)到9 m/s2的制動(dòng)減速度響應(yīng)時(shí)間為180 ms,與目前無高壓儲(chǔ)能器和預(yù)制動(dòng)的系統(tǒng)或者通過增壓系統(tǒng)直接增壓的響應(yīng)時(shí)間相比,縮短了約340 ms,減速度調(diào)節(jié)精度為±0.1 m/s2,減速度調(diào)節(jié)響應(yīng)時(shí)間為25 ms,減速度上升過程比較平穩(wěn),響應(yīng)快,能達(dá)到較穩(wěn)定的最大減速度,制動(dòng)過程中本車制動(dòng)減速度時(shí)間響應(yīng)曲線如圖13a所示。在車輛制動(dòng)減速過程中,車速呈線性下降,制動(dòng)平順性和舒適性較好,本車車速變化曲線如圖13b所示。
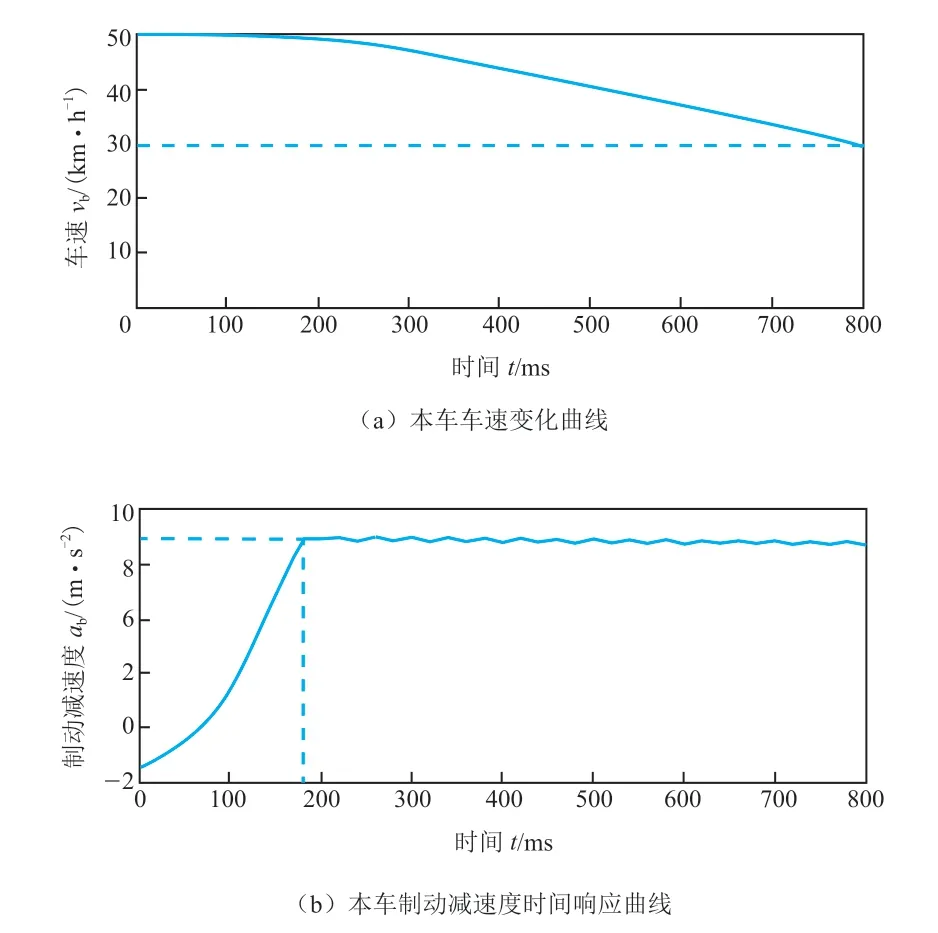
圖13 本車制動(dòng)減速度時(shí)間響應(yīng)和車速變化曲線
4.3 制動(dòng)控制算法應(yīng)用測試與分析
根據(jù)本文提出的基于雙閉環(huán)的最小安全跟車距離控制算法,開發(fā)的智能自動(dòng)跟車系統(tǒng),在前車靜止和減速運(yùn)行工況下進(jìn)行了實(shí)際場景測試。兼顧行車安全和道路行車效率,在實(shí)際應(yīng)用中,最小安全跟車距離d的理想值為1~2 m內(nèi)。當(dāng)兩車距離由遠(yuǎn)而近時(shí),距離越近,相對(duì)車速越小,最小安全跟車距離越容易控制。
本系統(tǒng)通過視覺和雷達(dá)系統(tǒng)實(shí)時(shí)檢測本車和前車的相對(duì)距離Dr,并實(shí)時(shí)調(diào)整本車的目標(biāo)制動(dòng)減速度ab_o,保證了本車車速vb為0時(shí),和前車的最小安全跟車距離d保持在1~2 m范圍內(nèi)。為了確保測試的安全性,在測試時(shí)將式(7)和式(8)中的d值設(shè)定為6~7 m,測量的d值減去5 m作為實(shí)際控制的最小安全跟車距離,本車與前車的最小安全跟車距離采用激光測距儀進(jìn)行實(shí)時(shí)跟蹤測量。
4.3.1 前車靜止工況下的測試與分析
在前車靜止工況下,本自主跟車系統(tǒng)在多次接近前方靜止車輛的過程中,記錄了20次(每個(gè)初始車速測試4次)最小安全跟車距離d,測試數(shù)據(jù)見表1。由表1可知,最小安全跟車距離控制精度高,具有很好的魯棒性,不依賴于初始車速,最小安全跟車距離的控制不受初始車速的影響,克服了本車在不同車速下,最小安全跟車距離偏大或者偏小的問題。
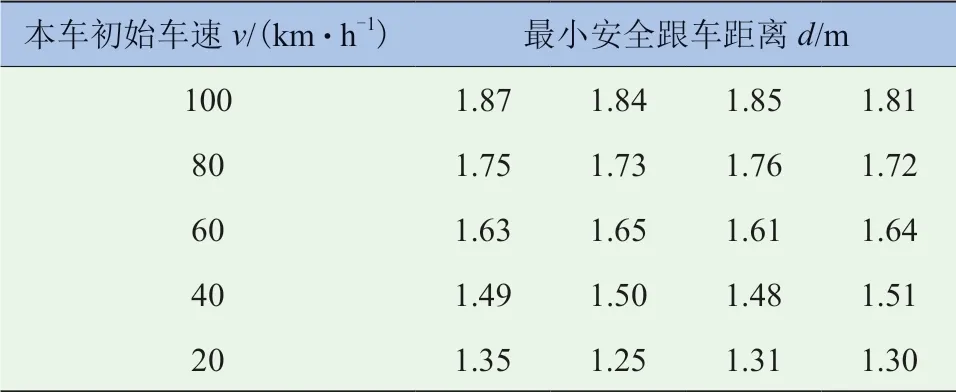
表1 前車靜止工況下最小安全跟車距離實(shí)測結(jié)果
4.3.2 前車減速運(yùn)行工況下的測試與分析
在前車減速運(yùn)行工況下,本自主跟車系統(tǒng)在多次接近前方減速車輛的過程中,記錄了20次(每對(duì)初始車速測試4次)最小安全跟車距離d,測試數(shù)據(jù)見表2。前車在減速運(yùn)行工況下,由于采用了最小安全跟車距離的閉環(huán)控制,所以克服了安全距離估算時(shí)前車制動(dòng)減速度無法預(yù)知所帶來的問題。由表2可知,在本車和前方車輛均處于減速運(yùn)行工況下,本車和前車相對(duì)速度小于等于0時(shí),最小安全跟車距離均保持在1~2 m范圍內(nèi),表現(xiàn)出了較穩(wěn)定的控制效果。克服了本車和前車在不同初始車速下,最小安全跟車距離偏大或偏小的問題。利用常閉減壓閥的掉電關(guān)閉功能,實(shí)現(xiàn)了不限時(shí)長時(shí)間保壓功能,滿足了長時(shí)間制動(dòng)和自動(dòng)駐車需求,解決了車輛無電子駐車制動(dòng)無法實(shí)現(xiàn)自動(dòng)駐車的問題。
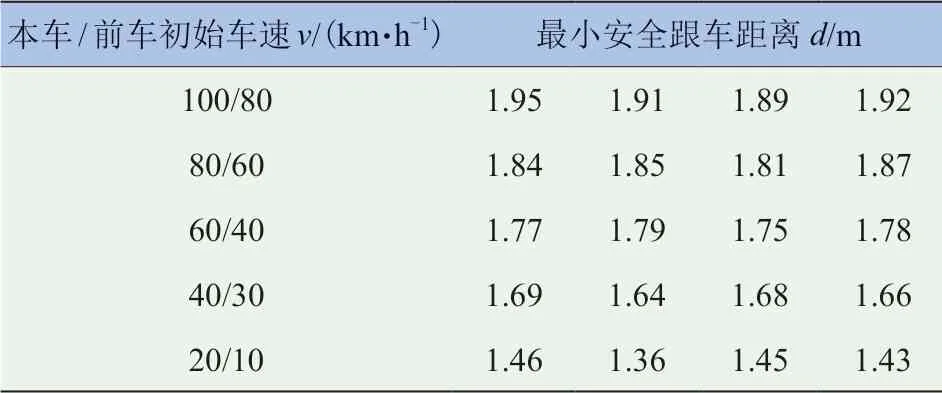
表2 前車運(yùn)行工況下最小安全跟車距離實(shí)測結(jié)果
本研究將主動(dòng)制動(dòng)系統(tǒng)和最小安全跟車距離閉環(huán)控制相結(jié)合,不僅保證了行車安全,提高了道路行車效率,同時(shí)也降低了制動(dòng)系統(tǒng)控制的難度,車輛制動(dòng)減速過程中,表現(xiàn)出了較好的平順性和舒適性,具有很好的實(shí)用性。
5 結(jié)論
(1)本文將常用的常開減壓閥替換為常閉減壓閥,并引入了自鎖電磁閥,實(shí)現(xiàn)了掉電任意長時(shí)間的壓力保持和電子駐車,并且可以在主動(dòng)制動(dòng)和人工制動(dòng)模式間自由切換。
(2)采用高壓儲(chǔ)能器、雙路增壓以及預(yù)制動(dòng),大大縮短了系統(tǒng)制動(dòng)響應(yīng)時(shí)間,雙管路上10 MPa的建壓時(shí)間僅為170 ms,解決了目前電子液壓主動(dòng)制動(dòng)系統(tǒng)響應(yīng)慢(約500 ms)的問題。
(3)針對(duì)實(shí)際工程應(yīng)用,提出了基于距離和減速度雙閉環(huán)控制的制動(dòng)控制算法,與目前常采用的液壓壓力閉環(huán)控制算法相比,運(yùn)行效率更高,響應(yīng)更快。在干燥瀝青路面上,9 m/s2減速度響應(yīng)時(shí)間僅為180 ms,在保證制動(dòng)平順性的同時(shí),還有效提高了車輛行駛安全性和道路行車效率。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
