汽車(chē)主動(dòng)轉(zhuǎn)向與直接橫擺力矩協(xié)調(diào)控制
2019-04-08 06:35:40趙林峰高曉程謝有浩從光好
汽車(chē)工程學(xué)報(bào) 2019年1期
關(guān)鍵詞:汽車(chē)
趙林峰,高曉程,謝有浩,從光好
(1.合肥工業(yè)大學(xué) 汽車(chē)與交通工程學(xué)院,合肥 230009;2.安徽獵豹汽車(chē)有限公司,安徽,滁州 239064)
主動(dòng)安全系統(tǒng)有利于提高汽車(chē)的操縱性、穩(wěn)定性和舒適性,如防抱死制動(dòng)系統(tǒng)(Antilock Brake System,ABS)、車(chē)身電子穩(wěn)定系統(tǒng)(Electronic Stability Program,ESP)紛紛應(yīng)用于現(xiàn)代汽車(chē)上。而主動(dòng)轉(zhuǎn)向汽車(chē)因其特有的優(yōu)勢(shì),能夠進(jìn)一步增強(qiáng)汽車(chē)的穩(wěn)定性[1-5]。
SARUCHI等[6]采用復(fù)合非線性控制算法,以線控轉(zhuǎn)向汽車(chē)實(shí)際橫擺角速度為反饋?zhàn)兞窟M(jìn)行主動(dòng)轉(zhuǎn)向控制,并驗(yàn)證了該算法能夠有效提高汽車(chē)的行駛穩(wěn)定性。 LI Fang等[7]在分析不同角傳動(dòng)比對(duì)汽車(chē)轉(zhuǎn)向靈敏度和穩(wěn)態(tài)橫擺角速度增益影響的基礎(chǔ)上,提出了主動(dòng)轉(zhuǎn)向控制策略,并利用遺傳算法優(yōu)化得到不同車(chē)速下的理想橫擺角速度增益,以達(dá)到降低駕駛員駕駛負(fù)擔(dān)、保證駕駛安全的目的。桑楠等[8]基于Lyapunov理論設(shè)計(jì)了主動(dòng)轉(zhuǎn)向和直接橫擺力矩自適應(yīng)控制系統(tǒng),并考慮輪胎的非線性特性對(duì)輪胎側(cè)偏剛度進(jìn)行在線估計(jì),以增強(qiáng)控制器的魯棒性,從而改善汽車(chē)的操縱穩(wěn)定性和行駛安全性。 NAM等[9]基于主動(dòng)轉(zhuǎn)向控制設(shè)計(jì)了魯棒橫擺穩(wěn)定控制系統(tǒng),該系統(tǒng)同時(shí)采用PI跟蹤控制器和轉(zhuǎn)角擾動(dòng)觀測(cè)器實(shí)現(xiàn)線控轉(zhuǎn)向汽車(chē)的主動(dòng)轉(zhuǎn)向和穩(wěn)定性控制。
本研究采用主動(dòng)轉(zhuǎn)向與直接橫擺力矩協(xié)調(diào)控制的方式來(lái)提高線控轉(zhuǎn)向汽車(chē)的穩(wěn)定性。當(dāng)汽車(chē)處于輕度失穩(wěn)工況時(shí)僅采用主動(dòng)轉(zhuǎn)向控制,產(chǎn)生附加前輪轉(zhuǎn)角對(duì)汽車(chē)前輪進(jìn)行實(shí)時(shí)調(diào)整,使汽車(chē)重新回到穩(wěn)態(tài)工況;而當(dāng)汽車(chē)處于重度失穩(wěn)工況時(shí)則啟動(dòng)直接橫擺力矩控制對(duì)汽車(chē)后輪進(jìn)行制動(dòng),與主動(dòng)轉(zhuǎn)向控制協(xié)調(diào)工作,使汽車(chē)重新回到穩(wěn)態(tài)工況。
1 汽車(chē)動(dòng)力學(xué)模型
1.1 線性二自由度參考模型
文獻(xiàn)[10]中給出了汽車(chē)的線性二自由度參考模型,該模型包含了汽車(chē)質(zhì)量、輪胎側(cè)偏剛度兩方面的參數(shù),能夠很好地描述汽車(chē)穩(wěn)態(tài)工況下的運(yùn)動(dòng)狀態(tài)。其微分方程為:

式中:β為質(zhì)心側(cè)偏角;γ為橫擺角速度;vx為汽車(chē)縱向車(chē)速;kf、kr分別為前、后軸總的側(cè)偏剛度;δf為前輪轉(zhuǎn)角;a、b分別為質(zhì)心至前、后軸的距離;Iz為整車(chē)?yán)@z軸的轉(zhuǎn)動(dòng)慣量。
于是,可由二自由度模型計(jì)算得到穩(wěn)態(tài)工況下的期望橫擺角速度和期望質(zhì)心側(cè)偏角:

式中:γd為期望橫擺角速度;βd為期望質(zhì)心側(cè)偏角;L為軸距;K為汽車(chē)穩(wěn)定性因數(shù)。

同時(shí),由于汽車(chē)側(cè)向加速度的最大值受到路面附著系數(shù)的限制,因此期望橫擺角速度和期望質(zhì)心側(cè)偏角還需滿足[11]:

式中:μ為路面附著系數(shù)。
由此可得到穩(wěn)態(tài)工況下汽車(chē)的期望橫擺角速度和期望質(zhì)心側(cè)偏角分別為:

1.2 主動(dòng)轉(zhuǎn)向控制的車(chē)輛模型
汽車(chē)主動(dòng)轉(zhuǎn)向是將期望橫擺角速度γd和期望質(zhì)心側(cè)偏角βd與整車(chē)模型中輸出的實(shí)際橫擺角速度γr和實(shí)際質(zhì)心側(cè)偏角βr進(jìn)行比較,將偏差輸入主動(dòng)轉(zhuǎn)向控制器,由控制器輸出此時(shí)應(yīng)得到的合理的汽車(chē)前輪轉(zhuǎn)角。通過(guò)轉(zhuǎn)向執(zhí)行電機(jī)的閉環(huán)控制,使實(shí)際的前輪轉(zhuǎn)角δf跟蹤控制器輸出前輪轉(zhuǎn)角,保證汽車(chē)的行駛穩(wěn)定性。
根據(jù)車(chē)輛行駛狀態(tài),通過(guò)施加附加前輪轉(zhuǎn)角改善車(chē)輛的側(cè)向動(dòng)態(tài)特性。圖1為主動(dòng)前輪轉(zhuǎn)向系統(tǒng),該系統(tǒng)是在傳統(tǒng)轉(zhuǎn)向系統(tǒng)的方向盤(pán)與機(jī)械轉(zhuǎn)向器之間嵌入一個(gè)二自由度的雙排行星齒輪機(jī)構(gòu)。行星齒輪機(jī)構(gòu)有兩個(gè)主動(dòng)輸入,分別為方向盤(pán)轉(zhuǎn)角θ1和主動(dòng)轉(zhuǎn)向電機(jī)轉(zhuǎn)角θ2,通過(guò)θ1和θ2的疊加實(shí)現(xiàn)主動(dòng)轉(zhuǎn)向控制,其中θ2是主動(dòng)轉(zhuǎn)向電機(jī)產(chǎn)生,由車(chē)輛主動(dòng)轉(zhuǎn)向控制器根據(jù)車(chē)輛行駛狀態(tài)確定,主動(dòng)轉(zhuǎn)向系統(tǒng)車(chē)輛的前輪轉(zhuǎn)角δf為:

式中:δ1為方向盤(pán)輸入產(chǎn)生的前輪轉(zhuǎn)角;δ2為由主動(dòng)轉(zhuǎn)向電機(jī)輸入產(chǎn)生的附加前輪轉(zhuǎn)角;G1為轉(zhuǎn)向系統(tǒng)機(jī)械轉(zhuǎn)向器傳動(dòng)比。
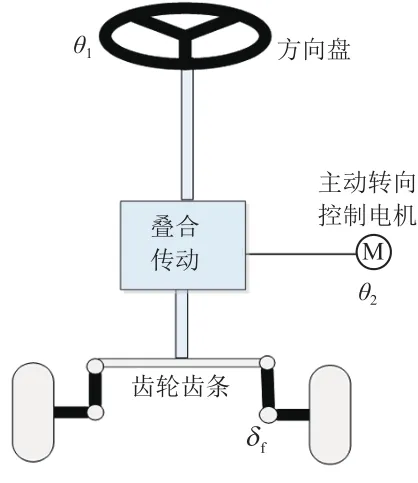
圖1 汽車(chē)主動(dòng)轉(zhuǎn)向系統(tǒng)
參考文獻(xiàn)[8]可以得到在二自由度車(chē)輛模型上采用主動(dòng)轉(zhuǎn)向的車(chē)輛動(dòng)力學(xué)方程為:

1.3 直接橫擺力矩控制的車(chē)輛模型
直接橫擺力矩控制主要用來(lái)改善車(chē)輛操縱穩(wěn)定性,主要的原理是通過(guò)改變發(fā)動(dòng)機(jī)的輸出動(dòng)力或?qū)Σ糠周?chē)輪進(jìn)行制動(dòng)來(lái)實(shí)現(xiàn),前輪轉(zhuǎn)角較小,忽略轉(zhuǎn)向車(chē)輪回正力矩的影響,在二自由度基本車(chē)輛模型上考慮有橫擺力矩作用的動(dòng)力學(xué)方程為:

式中:M為制動(dòng)力或驅(qū)動(dòng)力產(chǎn)生的橫擺力矩。
2 控制系統(tǒng)設(shè)計(jì)
2.1 總體控制策略
控制系統(tǒng)的總體控制策略框圖,如圖2所示。所設(shè)計(jì)的控制系統(tǒng)包括上層控制器和下層控制器,其中上層控制器為主動(dòng)轉(zhuǎn)向與直接橫擺力矩功能分配的協(xié)調(diào)控制,下層控制器包括主動(dòng)轉(zhuǎn)向控制器和直接橫擺力矩控制器。
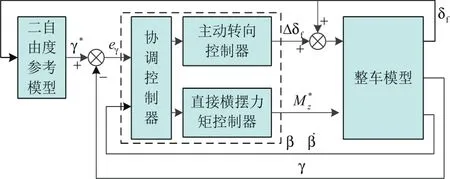
圖2 總體控制策略框圖
2.2 上層控制器設(shè)計(jì)
汽車(chē)正常行駛過(guò)程中為防止影響駕駛員的操縱,通常不希望對(duì)輪胎進(jìn)行制動(dòng)。因此,可根據(jù)汽車(chē)行駛狀態(tài)設(shè)計(jì)協(xié)調(diào)控制器,保證正常行駛時(shí)僅主動(dòng)轉(zhuǎn)向控制器工作,而汽車(chē)處于失穩(wěn)狀態(tài)時(shí)啟動(dòng)直接橫擺力矩控制器。
國(guó)內(nèi)外許多學(xué)者對(duì)汽車(chē)行駛的穩(wěn)定性指標(biāo)進(jìn)行了研究,根據(jù)文獻(xiàn)[12]定義穩(wěn)態(tài)邊界:

式中:p1=9. 55;p2=2. 49。
當(dāng)χ在穩(wěn)態(tài)邊界之內(nèi)時(shí),僅采用主動(dòng)轉(zhuǎn)向控制;而當(dāng)χ超出穩(wěn)態(tài)邊界時(shí),則啟動(dòng)直接橫擺力矩控制與主動(dòng)轉(zhuǎn)向控制協(xié)調(diào)工作,使汽車(chē)回到穩(wěn)定狀態(tài)。
考慮汽車(chē)由穩(wěn)態(tài)到非穩(wěn)態(tài)是一個(gè)連續(xù)的過(guò)程,因此需要對(duì)直接橫擺力矩控制介入的時(shí)機(jī)和強(qiáng)度進(jìn)行控制。為了避免汽車(chē)行駛過(guò)程中因直接橫擺力矩控制而干擾駕駛員的轉(zhuǎn)向行駛,降低轉(zhuǎn)向舒適性,在直接橫擺力矩控制中僅對(duì)后輪進(jìn)行控制,并通過(guò)設(shè)計(jì)調(diào)度參數(shù)對(duì)后輪制動(dòng)強(qiáng)度進(jìn)行調(diào)節(jié)。

式中:λ為調(diào)度參數(shù);=0. 8;=1,=1。
由此得到調(diào)度參數(shù)與穩(wěn)定性指標(biāo)的關(guān)系,如圖3所示。

圖3 調(diào)度參數(shù)與穩(wěn)定性指標(biāo)的關(guān)系
2.3 下層控制器設(shè)計(jì)
2.3.1 主動(dòng)轉(zhuǎn)向控制器設(shè)計(jì)
主動(dòng)轉(zhuǎn)向控制器采用單神經(jīng)元自適應(yīng)PID控制算法進(jìn)行設(shè)計(jì),將線控轉(zhuǎn)向汽車(chē)的實(shí)際橫擺角速度與式(7)的期望橫擺角速度進(jìn)行比較,利用單神經(jīng)元自適應(yīng)PID計(jì)算出附加前輪轉(zhuǎn)角,與實(shí)際前輪轉(zhuǎn)角疊加以對(duì)前輪轉(zhuǎn)角進(jìn)行適時(shí)調(diào)整,起到控制前輪轉(zhuǎn)向和改善汽車(chē)穩(wěn)定性的作用。控制器框圖如圖4所示。

圖4 SNPID控制器框圖
其中:
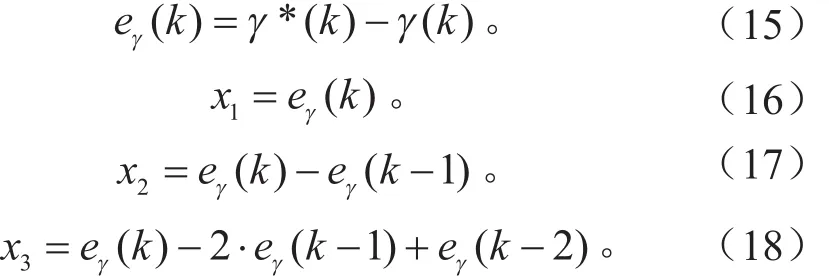
式中:eγ(k)為k時(shí)刻期望橫擺角速度與實(shí)際橫擺角速度的偏差值;x1,x2,x3分別為單神經(jīng)元PID控制算法的3個(gè)輸入變量。
2.3.2 直接橫擺力矩控制器設(shè)計(jì)
為了不干涉駕駛員的正常駕駛,直接橫擺力矩控制器在汽車(chē)處于失穩(wěn)工況時(shí)才參與工作。也采用單神經(jīng)元PID控制算法,以汽車(chē)實(shí)際橫擺角速度和期望橫擺角速度的偏差作為輸入,輸出為附加橫擺力矩,并根據(jù)汽車(chē)行駛狀態(tài)對(duì)各輪胎的制動(dòng)力矩進(jìn)行分配。
對(duì)于單個(gè)輪胎而言,其制動(dòng)力與輪胎縱向力關(guān)系可表示為:

式中:Tbij為輪胎制動(dòng)力矩;Rw為輪胎半徑;Fxij為輪胎縱向力。
由于只采用后輪制動(dòng)的方式,因此可得到控制器輸出的附加橫擺力矩與后軸各輪胎縱向力的關(guān)系為:

式中:ΔMz為附加橫擺力矩;tr為后軸輪距;Fxrl、Fxrr分別為后軸左、右輪胎的縱向力。
為了使制動(dòng)效果最佳,不同工況下制動(dòng)輪選擇原則如下:
(1)當(dāng)汽車(chē)處于不足轉(zhuǎn)向時(shí),期望橫擺角速度的絕對(duì)值大于實(shí)際橫擺角速度的絕對(duì)值,因此選擇內(nèi)后輪作為制動(dòng)輪。
(2)當(dāng)汽車(chē)處于過(guò)度轉(zhuǎn)向時(shí),期望橫擺角速度的絕對(duì)值小于實(shí)際橫擺角速度的絕對(duì)值,因此選擇外后輪作為制動(dòng)輪。
具體制動(dòng)力分配情況,見(jiàn)表1。

表1 制動(dòng)力分配表
其中,eγ=γ*?γ,且向左轉(zhuǎn)時(shí),前輪轉(zhuǎn)角δf>0。
3 仿真分析
為驗(yàn)證所提出控制策略的有效性,分別選取高附和低附著系數(shù)路面正弦輸入試驗(yàn)工況、高附和低附著系數(shù)路面階躍輸入試驗(yàn)工況進(jìn)行驗(yàn)證。在CarSim中選擇寬闊的平坦場(chǎng)地,高附著系數(shù)路面設(shè)定μ=0. 85,低附著系數(shù)里面設(shè)定μ=0. 3,仿真車(chē)速均為vμx=80 km/h,并設(shè)定相應(yīng)的仿真工況。仿真中用到的整車(chē)參數(shù)見(jiàn)表2。
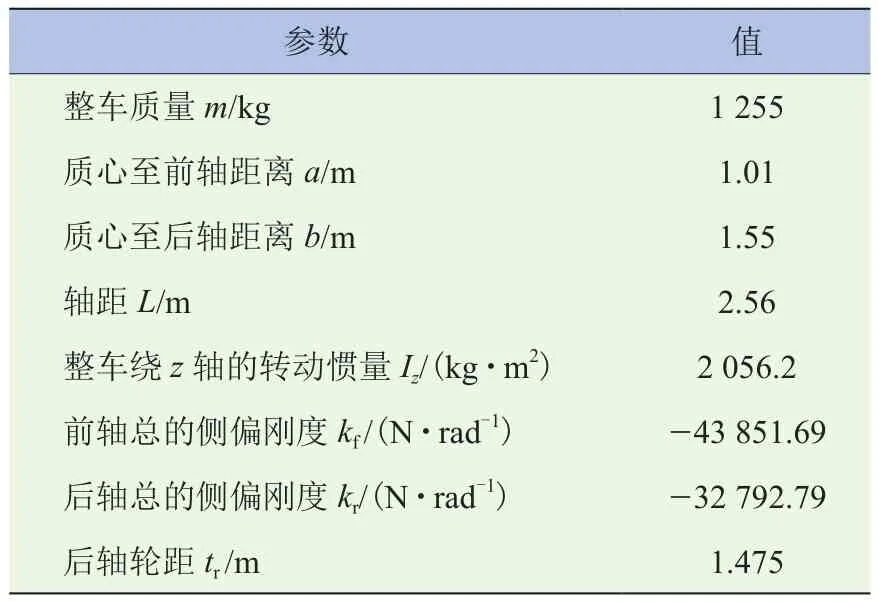
表2 整車(chē)參數(shù)
3.1 高附正弦輸入試驗(yàn)工況
在CarSim中設(shè)置前輪轉(zhuǎn)角為幅值0.1 rad,周期5 s的正弦輸入,分別得到橫擺角速度和質(zhì)心側(cè)偏角的響應(yīng)情況,仿真結(jié)果如圖5和圖6所示。

圖5 高附正弦輸入-橫擺角速度響應(yīng)曲線

圖6 高附正弦輸入-質(zhì)心側(cè)偏角響應(yīng)曲線
從仿真結(jié)果可以看出,在無(wú)控制時(shí)汽車(chē)始終處于轉(zhuǎn)向不足狀態(tài),汽車(chē)實(shí)際橫擺角速度絕對(duì)值始終小于期望值的絕對(duì)值;而汽車(chē)實(shí)際質(zhì)心側(cè)偏角曲線振幅變化較大,且與期望值偏差也較大。采用主動(dòng)轉(zhuǎn)向控制時(shí)汽車(chē)存在輕微的轉(zhuǎn)向不足,此時(shí)汽車(chē)實(shí)際橫擺角速度更趨近于期望橫擺角速度,汽車(chē)實(shí)際質(zhì)心側(cè)偏角也更趨近于期望值,有利于提高汽車(chē)的行駛穩(wěn)定性。而采用協(xié)調(diào)控制時(shí),汽車(chē)實(shí)際橫擺角速度和質(zhì)心側(cè)偏角均能夠得到較好的控制,確保汽車(chē)始終在穩(wěn)態(tài)工況下行駛。
3.2 低附正弦輸入試驗(yàn)工況
在CarSim中設(shè)置前輪轉(zhuǎn)角為幅值0.1 rad,周期5 s的正弦輸入,分別得到橫擺角速度和質(zhì)心側(cè)偏角的響應(yīng)情況,仿真結(jié)果如圖7和圖8所示。
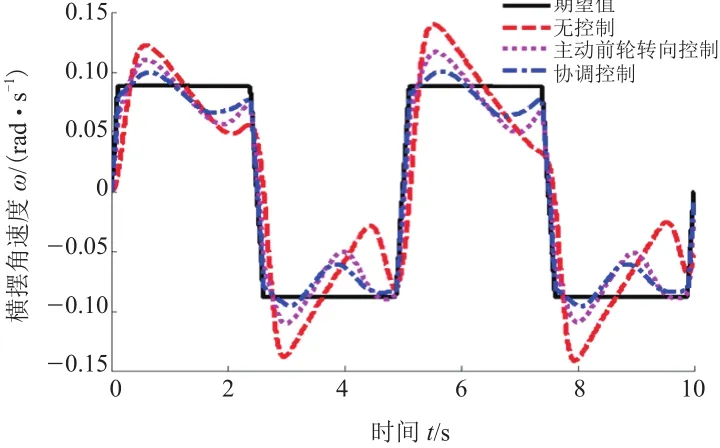
圖7 低附正弦輸入-橫擺角速度響應(yīng)曲線
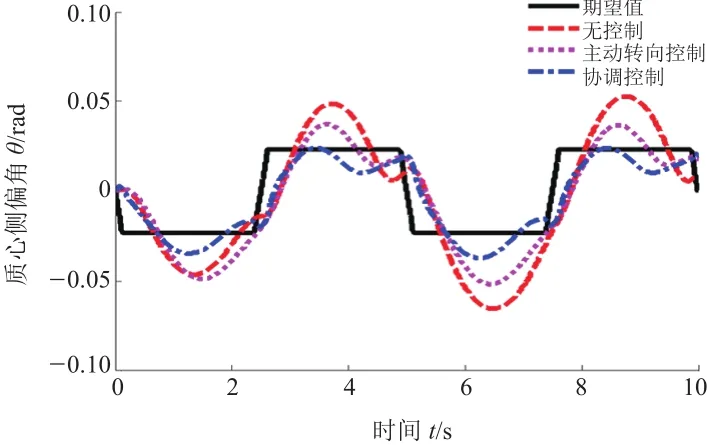
圖8 低附正弦輸入-質(zhì)心側(cè)偏角響應(yīng)曲線
從仿真結(jié)果可以看出,在無(wú)控制時(shí)汽車(chē)實(shí)際橫擺角速度波動(dòng)較大,汽車(chē)出現(xiàn)失穩(wěn)現(xiàn)象;汽車(chē)實(shí)際質(zhì)心側(cè)偏角變化較為劇烈,且與期望值偏差較大。采用主動(dòng)轉(zhuǎn)向控制時(shí),能夠在一定程度上改善汽車(chē)行駛穩(wěn)定性,對(duì)橫擺角速度控制起到一定的效果,但是對(duì)質(zhì)心側(cè)偏角的改善并不明顯。而當(dāng)采用協(xié)調(diào)控制時(shí),能夠有效保證橫擺角速度和質(zhì)心側(cè)偏角跟蹤上期望值,以提高汽車(chē)行駛的穩(wěn)定性。
3.3 高附階躍輸入試驗(yàn)工況
在CarSim中設(shè)置前輪轉(zhuǎn)角為幅值0.1 rad,起躍速度為200 (°)/s的正弦輸入,分別得到橫擺角速度和質(zhì)心側(cè)偏角的響應(yīng)情況,仿真結(jié)果如圖9和圖10所示。

圖9 高附階躍輸入-橫擺角速度響應(yīng)曲線
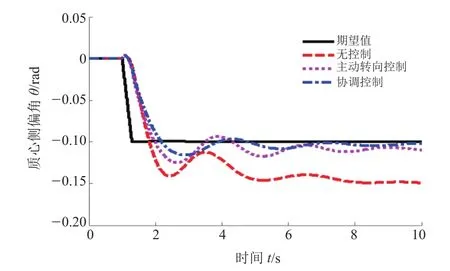
圖10 高附階躍輸入-質(zhì)心側(cè)偏角響應(yīng)曲線
從仿真結(jié)果可以看出,曲線穩(wěn)定后橫擺角速度期望值為0.375 rad/s,質(zhì)心側(cè)偏角期望值為-0.1 rad。在無(wú)控制時(shí)汽車(chē)實(shí)際橫擺角速度始終小于期望值且振幅波動(dòng)明顯,6 s后逐漸穩(wěn)定且幅值為0.28 rad/s,汽車(chē)始終處于嚴(yán)重轉(zhuǎn)向不足狀態(tài);汽車(chē)實(shí)際質(zhì)心側(cè)偏角變化劇烈,且在8 s后才逐漸開(kāi)始穩(wěn)定,幅值為0.149 rad,明顯大于期望值。采用主動(dòng)轉(zhuǎn)向控制時(shí)汽車(chē)實(shí)際橫擺角速度變化較為平緩,6 s后逐漸穩(wěn)定且幅值為0.31 rad/s,汽車(chē)處于輕度轉(zhuǎn)向不足狀態(tài);汽車(chē)實(shí)際質(zhì)心側(cè)偏角改善較為明顯,基本接近于期望值且8 s后開(kāi)始穩(wěn)定,幅值為0.11 rad。采用協(xié)調(diào)控制時(shí)汽車(chē)實(shí)際橫擺角速度和質(zhì)心側(cè)偏角變化均較為平緩,且收斂迅速,橫擺角速度在6 s時(shí)達(dá)到穩(wěn)定且幅值為0.327 rad/s,質(zhì)心側(cè)偏角在7 s時(shí)達(dá)到穩(wěn)定且幅值在-0.103 rad附近,有效提高了汽車(chē)的行駛穩(wěn)定性。
3.4 低附階躍輸入試驗(yàn)工況
在CarSim中設(shè)置前輪轉(zhuǎn)角為幅值0.1 rad,起躍速度為200 (°)/s的正弦輸入,分別得到橫擺角速度和質(zhì)心側(cè)偏角的響應(yīng)情況,仿真結(jié)果如圖11和圖12所示。

圖11 低附階躍輸入-橫擺角速度響應(yīng)曲線
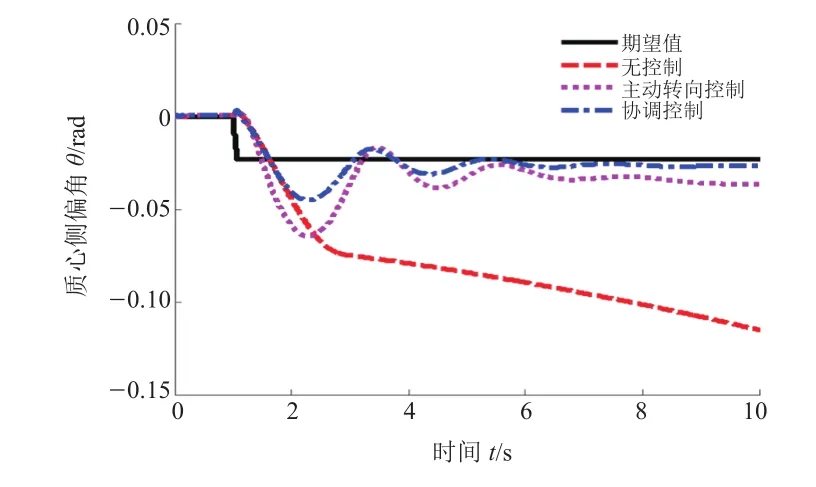
圖12 低附階躍輸入-質(zhì)心側(cè)偏角響應(yīng)曲線
從仿真結(jié)果可以看出,橫擺角速度期望值為0.088 rad/s,質(zhì)心側(cè)偏角期望值為-0.023 5 rad。在無(wú)控制時(shí)汽車(chē)明顯已經(jīng)發(fā)生失穩(wěn),實(shí)際橫擺角速度幅值較大,且實(shí)際質(zhì)心側(cè)偏角已遠(yuǎn)遠(yuǎn)超過(guò)期望值。采用主動(dòng)轉(zhuǎn)向控制時(shí),實(shí)際橫擺角速度幅值明顯減少,但是曲線仍存在抖動(dòng),在7.8 s后達(dá)到穩(wěn)定,幅值為0.1 rad/s,實(shí)際橫擺角速度也存在一定的抖動(dòng),在9 s后開(kāi)始穩(wěn)定且幅值為-0.036 rad。采用協(xié)調(diào)控制時(shí),與采用主動(dòng)轉(zhuǎn)向控制相比汽車(chē)的實(shí)際橫擺角速度變化相近,仍存在輕微的抖動(dòng)現(xiàn)象,但是曲線收斂較快,曲線在5 s時(shí)達(dá)到穩(wěn)定且幅值為0.092 rad/s;而汽車(chē)質(zhì)心側(cè)偏角得到了很好的控制,曲線變化平緩且收斂較快,曲線在6 s時(shí)達(dá)到穩(wěn)定且幅值為-0.027 rad。
4 結(jié)論
(1)分析線控轉(zhuǎn)向汽車(chē)的穩(wěn)定性,并提出一種主動(dòng)轉(zhuǎn)向和直接橫擺力矩協(xié)調(diào)控制的控制策略,根據(jù)汽車(chē)行駛穩(wěn)態(tài)邊界設(shè)計(jì)調(diào)度參數(shù),對(duì)直接橫擺力矩控制的介入時(shí)機(jī)進(jìn)行控制。
(2)采用單神經(jīng)元PID控制算法設(shè)計(jì)主動(dòng)轉(zhuǎn)向控制器,產(chǎn)生附加前輪轉(zhuǎn)角對(duì)前輪轉(zhuǎn)角進(jìn)行補(bǔ)償控制。同時(shí),采用單神經(jīng)元PID控制算法設(shè)計(jì)直接橫擺力矩控制器,產(chǎn)生附加橫擺力矩,并根據(jù)不同行駛工況對(duì)制動(dòng)力進(jìn)行分配。
(3)選擇典型工況進(jìn)行了仿真分析,并驗(yàn)證了所提出的線控轉(zhuǎn)向汽車(chē)穩(wěn)定性控制策略的有效性。采用主動(dòng)轉(zhuǎn)向和直接橫擺力矩協(xié)調(diào)控制能夠很好地實(shí)現(xiàn)對(duì)汽車(chē)橫擺角速度和質(zhì)心側(cè)偏角的跟蹤控制,有效地提高了汽車(chē)行駛的穩(wěn)定性。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學(xué)生優(yōu)秀作文(低年級(jí))(2020年4期)2020-07-24 08:31:08
汽車(chē)與安全(2019年9期)2019-11-22 09:48:03
汽車(chē)與安全(2019年8期)2019-09-26 04:49:10
汽車(chē)與安全(2019年5期)2019-07-30 02:49:51
汽車(chē)觀察(2019年2期)2019-03-15 06:00:06
汽車(chē)與新動(dòng)力(2018年2期)2018-05-09 00:31:56
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50