利用軌道動力平車作業的聯鎖進路控制系統
2019-04-08 11:09:40陳安觀
鐵路通信信號工程技術 2019年3期
陳安觀
(中鐵武漢勘察設計研究院有限公司,武漢 430074)
1 概述
2 系統方案
為適應集裝箱水鐵聯運在鐵路港灣站與各港口碼頭鐵路集裝箱場(港區、貨區)運輸方式的特點,解決集裝箱軌道動力平車(車組)進路控制的問題,本方案在基于集裝箱動力平車中轉倒裝作業方式下提出一種新型的鐵路集裝箱貨場進路控制系統,該系統為單元式區域聯鎖控制系統,適合一個鐵路港灣站對應一個或多個集裝箱貨區(港區)情況下的集裝箱裝卸中轉作業,也可以用于其他集裝箱動力車輛中轉倒裝作業方式。舉例示意如圖1 所示。
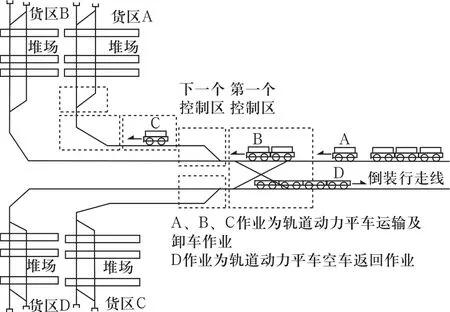
圖1 舉例示意圖Fig.1 Example diagram
本系統將車站(車場、貨場等)內軌道動力平車走行及作業區域,按照站場形狀和平行作業進路,劃分為若干個相互連接具有平行作業或能夠獨立運行的聯鎖進路控制區域。并將其定義為“單元聯鎖控制區”(簡稱控制區)。
控制區根據作業區內正在執行作業的車輛(組)狀態信息及位置關系,結合聯鎖進路關系,再通過計算機,自動生成允許車輛運行限制速度、運行距離長度的運行許可,指定軌道動力平車(組)根據該運行許可運行,并能夠保證車輛在允許走行長度的終點位置停車。當前車輛位置與進路允許停車位置的距離-速度關系定義為聯鎖進路TA 運行許可(簡稱TA 許可)。
在軌道動力平車(車組)作業控制區內,不設置地面信號,由車輛(組)作為作業執行發起者,向進路控制中心無線發送始端、終端進路運行請求,進路控制中心選擇最佳進路后,同意進路請求。車輛(組)獲得進路同意,依次與進路上的控制區以無線方式建立聯鎖關系,獲得該區域的路權,并根據控制區下達的TA 許可自動運行作業,軌道動力平車(車組)完全駛離本控制區后,控制區內聯鎖關系解除。
進路建立過程及進路解鎖過程均無需人工參與,進路控制的操作全程自動化。多項作業流程以控制區為基本進路聯鎖控制單位,在保證安全的前提下,可以同時進行,提高運輸作業效率。
本系統可實現對軌道動力平車作業區內聯鎖進路的安全、可靠控制,能夠保證軌道動力平車(車組)安全且高效的運行。
3 系統組成及功能
3.1 系統組成
鐵路港灣站集裝箱貨場進路控制系統由進路控制中心、單元聯鎖控制區裝置、軌道動力平車車載進路控制裝置3 部分組成。系統框圖如圖2 所示。
3.2 進路控制中心功能
進路控制中心是本系統的人機交互界面,由計算機系統和通信傳輸設備組成。具有接收及轉發作業計劃、接收外部接口信息、接收軌道動力平車作業請求及應答、作業進路規劃、接收軌道動力平車車載裝置狀態信息、接收及轉發軌旁區域控制裝置狀態信息等信息交互及設備狀態監測功能。
運動微分式(38)所包含的方程個數等于節點位移向量的維數,但該方程中還包含了另外一個未知函數,即軸線的運動量w0(t),因此需要補充一個方程。為此,對車輪的垂向運動應用動量定理。
3.3 單元聯鎖控制區裝置功能
進路控制系統將整個軌道動力平車作業區分割為若干區域(單元聯鎖控制區),每個區域設有一套獨立的聯鎖控制區裝置,每個單獨的單元聯鎖控制區裝置由一個軌旁區域控制裝置,若干個車輛計軸、應答器、分路道岔轉轍裝置和通信傳輸裝置組成,軌旁區域控制裝置與控制區內其他各裝置間采用控制電纜連接。區域控制裝置間按車站站場形狀構成電氣連接和網絡連接。區域聯鎖控制區裝置連接的示意如圖3 所示。
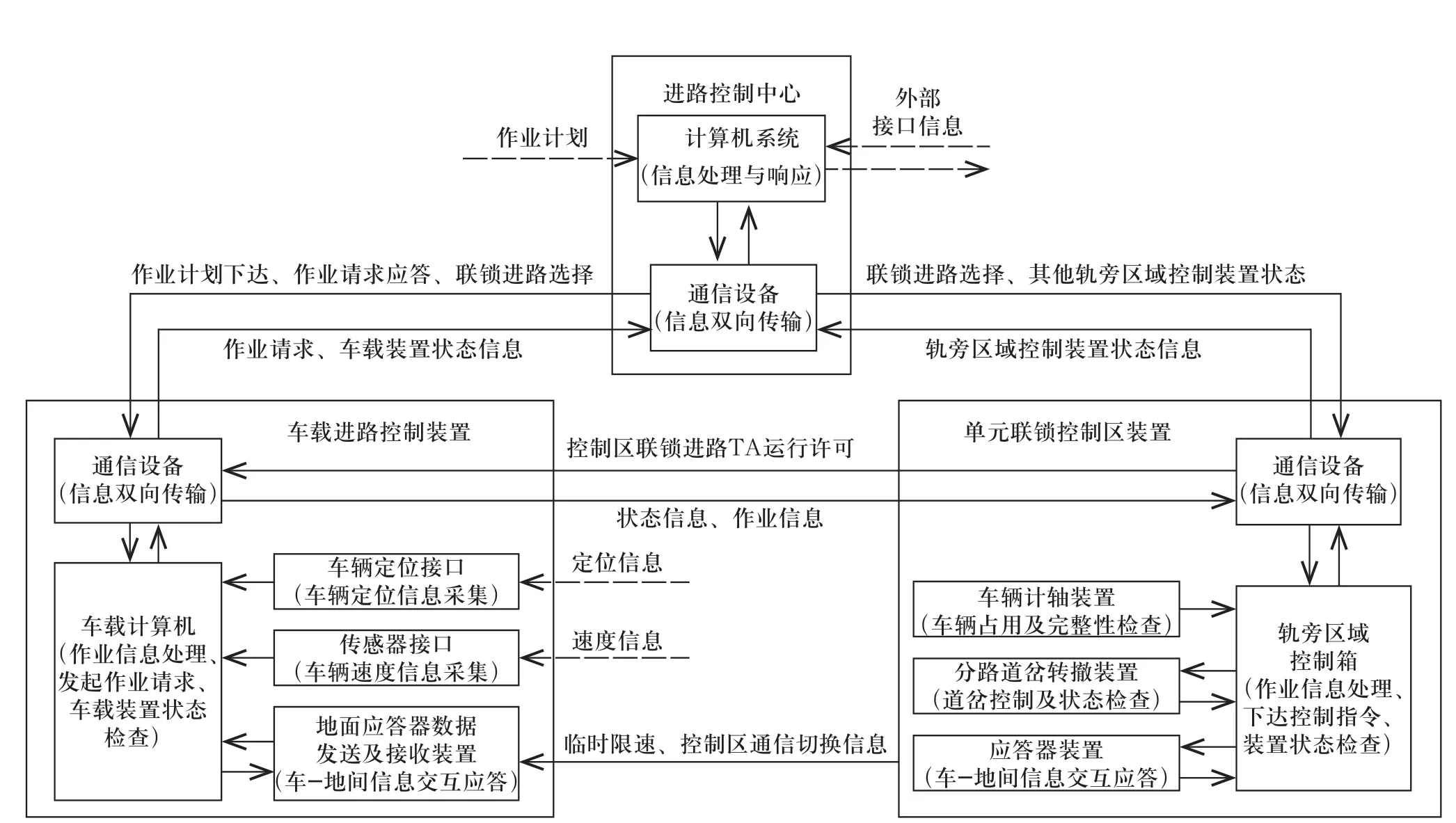
圖2 系統框圖Fig.2 System diagram
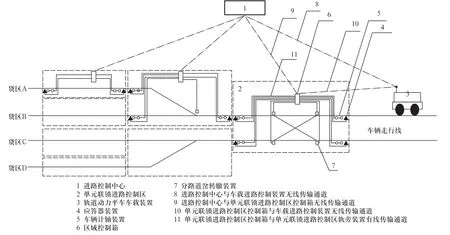
圖3 區域聯鎖控制區裝置連接Fig.3 Connection of local interlocking control area devices
軌旁區域控制裝置有獨立的進路控制邏輯運算及處理功能,是控制區的核心控制裝置,控制和管理本區域內其他軌旁裝置,具有軌道動力平車狀態信息接收及處理、作業信息接收及處理、分路道岔控制、車輛占用檢查、車列完整性檢查、車-地信息交互應答、軌旁設備狀態監測、發送聯鎖進路TA 運行許可等功能。
軌旁區域控制裝置根據作業區內正在執行作業的各動力平車(車組)運行方向、在站場所處的位置、當前運行速度、目的地等信息,再結合各動力平車(車組)運行過程中的相對位置關系,以及聯鎖進路開放條件(無沖突、敵對進路),計算生成的TA 許可。通過通信系統向軌道動力平車下達運行許可。
車輛計軸裝置用于檢查本區域內車輛占用情況及車輛完整性檢查;分路道岔轉轍裝置用于控制本區域分路道岔的運行方向轉換。
應答器裝置安裝在兩個控制區之間分界的位置,由進路控制子系統地面編碼電路和車載接收裝置組成;車輛(組)經過本區域時,與車輛(組)進行信息交互,傳遞定位校正、位置確認、臨時限速、控制區通信切換等控制信息;定位校正能夠減小無線定位的累積誤差,增加作業區內平行進路的位置確認辨別能力,保證系統安全性及可靠性。
控制區通信系統分為與控制中心的通信、與相鄰控制區的通信和與軌道動力平車車載通信裝置的通信3 個方面,通信系統可以采用各種不同的技術方法,用于雙向傳輸本控制區與控制中心間的狀態信息、與相鄰若干控制區之間的控制與狀態信息、與在本控制區及相鄰控制區運行的若干車載通信裝置傳輸進路請求與運行許可控制信息及運行狀態信息。
3.4 軌道動力平車車載進路控制裝置功能
軌道動力平車車載進路控制裝置由車載進路控制計算機系統、地面應答器數據接收裝置、車輛定位接口裝置、傳感器接口裝置、通信傳輸裝置組成。
車載進路控制系統是車載自動控制系統的組成部分,是車載自動控制系統的核心裝置,具有作業信息處理、發起進路作業請求、接收TA 許可、車載裝置狀態檢測、車輛定位信息采集、車輛速度信息采集、車-地信息交互應答等功能。
車輛(組)根據獲得的TA 許可自動運行,并根據車輛(組)在運行過程中的位置變化,不斷獲得新的TA 許可,直至車輛(組)獲得當前位置至目的地終點的全部TA 許可或到達目的地終點停車為止。
4 技術效果
本創新目的是根據集裝箱水鐵聯運在鐵路港灣站與各港口碼頭鐵路集裝箱場(港區、貨區)運輸方式的特點,利用先進的自動化、信息化技術,利用新型的作業設備,采用新的車站聯鎖進路控制系統和進路控制方法,提高貨物的運輸效率。
自動駕駛運行的集裝箱軌道動力平車(車組)作為裝載裝置時,由于作業區內,涉及軌道動力平車集結編組、平行裝卸、自動運行、自動停車及返回等多個作業流程;同時為了保證貨場內貨物運輸的及時和高效,需要盡可能的增加平行作業。傳統的進路控制方式顯然無法滿足這些要求。
與現有技術相比,本系統具有以下特點和效果。
1)提出了一種新型的用于自動駕駛運行集裝箱軌道動力平車(車組)作為運載裝置的車站聯鎖進路控制系統及方法;
2)提出了一種由進路控制中心發送作業計劃和進路選路策略,單元聯鎖控制區以分散自律方式對本區域內聯鎖進路控制,軌道動力平車(車組)作為作業執行發起者,直接參與聯鎖進路控制的車站進路控制系統及方法;
3)將車站(車場、貨場)劃分成若干個單元聯鎖控制區,各控制區設備組成定型,結構簡單,易于實現;
4)通過新型的進路控制系統及方法,可以實現軌道動力平車運行的自動化作業,減少了作業人員,減少了集裝箱中轉時間,提高了作業效率。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
