方興未艾的月球車
2019-04-09 02:36:44柯譜
太空探索 2019年2期
文/柯譜
1月3日,我國嫦娥四號月球探測器實現了人類探測器首次在月球背面軟著陸。此后,其中的玉兔二號月球車先后與著陸器分離,與鵲橋中繼星成功建立獨立數傳鏈路,完成了環境感知、路徑規劃,并按計劃在月面行走到達A點,開展科學探測,成為世界第一輛在月球背面運行的月球車
人類對月球探測的科學內涵正在不斷擴展,它包括月球的科學、月球上的科學和來自月球的科學三個方面。根據這樣的理念,未來對月球探索不僅要發射軌道器對月球進行普查,還要進行更多的月面活動,對月球進行詳查。從獲取探測數據的直接性和豐富性的角度來看,軟著陸和巡視勘察是其它探測形式所不能替代的,在空間探測技術發展中占據著很重要的地位。所以,用月面巡視探測器(或叫月球車)對月球進行探測十分重要。
▲ 蘇聯月球車1號離開著陸器進行巡視探測示意圖
兩類月球車
月球車是進行月球表面探測的重要工具之一。按照探測方式月球車一般分為兩類:
一類是無人駕駛的月球車。它由輪式底盤和一些其它設備組成,并載有多種科學探測儀器,用太陽能電池、蓄電池和核電池聯合供電,靠地面遙控指令或自主控制在月面進行巡視探測。蘇聯在20世紀70年代發射的月球車1號、2號和我國的玉兔號、玉兔二號月球車屬于這類,它們主要用于在月面進行巡視探測
另一類是有人駕駛的月球車。它主要作為航天員在月面活動的交通工具,用于擴大航天員的活動范圍和減少航天員的體力消耗,并隨時存放航天員收集的巖石和土壤標本。美國阿波羅15號、16號、17號載人登月飛船的航天員曾使用這種類似高爾夫車的月球車在月面活動。他們除科考和收集月巖樣品外,還用車上的攝像機和傳輸設備,向地球發回了航天員在月面的活動情景和離開月面時的情景。
至今,全球一共成功發射、運行過7輛月球車,即用于在月面進行無人巡視探測的蘇聯月球車1號和2號(分別由月球17號、21號月球探測器器釋放)、中國玉兔號和玉兔二號月球車(分別由嫦娥三號、四號月球探測器釋放),以及用于在月面運送航天員進行科學探測的美國3輛有人駕駛的月球車(分別由阿波羅15號、16號和17號載人登月飛船釋放)。
另外,按走行方式,月球車可分為輪式、腿式、蛇式、輪腿式、跳躍式、履帶式、滑撬式、氣囊式、履帶輪式和螺旋滾筒式等多種類型。不過,目前已使用的月球車都采用輪式,并又分為4輪式、6輪式和8輪式等幾種。
要求比較高
無人月球車是一種在月面進行巡視探測的行走裝置。它需適應月球環境,攜帶科學探測儀器在月面進行巡視探測,并把探測數據傳送回地球。因此,無人月球車實際上就是一種能夠在月球移動并完成探測任務的機器人。其主要作用是:裝載科學探測儀器,并為這些儀器提供電源、溫控、測控等正常工作的條件;在月面行走并進行勘測;把所探測到的科學數據傳回地球。

▲ 玉兔號月球車進行外場專項試驗,月球車后面的吊車把玉兔號輕輕吊起,模擬月面六分之一重力
在技術上,月球車要能適應月球輻射強、低重力(月球重力是地球的1/6,月壤很松軟,行進效率會降低)、路況復雜(月面崎嶇不平,月球車的輪子既不能打滑,也不能翻車,并可前進、后退、轉彎、爬坡、取物、采樣和翻轉)、溫差很大(月球的1天溫度相差大約310℃)等不利條件,并具有自主工作能力(達到初級人工智能,例如,識別、爬越或繞過障礙物等)。
這種月球車用于拍攝月面高分辨率圖像;勘查月球的物質和資源;研究月球的地形、地質和形態特征以及表面的輻射和環境;分析月面土壤的化學成分和物理力學性質;考察和收集月面的巖石樣品等。
同樣道理,由于月球環境比地球惡劣得多,所以載人月球車也比載人地球車要求高許多。美國在小布什總統執政期間,為了重返月球,曾實施星座計劃,為此研制了密封式月球車,即航天員在該車內可以不穿登月服。但隨著星座計劃的取消,這種月球車也不了了之了。
國外專家還提出過不少載人月球車的方案,例如,月球摩托車、火箭單座車、月球拖掛車、月球軌道巴士、中型月球探險車、客貨兩用月球車、雙座多用途高性能小型月球車等,但都沒有投入實用。
蘇聯月球車

▲ 蘇聯無人月球探測車側面

▲ 美國航天員尤金·塞爾南駕駛著阿波羅17號的載人月球車
1970年11月10日和1973年1月8日,蘇聯先后用質子號運載火箭發射了月球17號和21號月球探測器。“月球17號”在月球正面的雨海軟著陸,“月球21號”在月球正面的默尼環形山軟著陸。
月球17號和21號月球探測器分別攜帶的月球車1號、2號基本相同,都裝有8個輪子,長為2.13米,軸距為1.70米,車輪直徑為0.51米,寬度為0.20米,車輪動力范圍為0.1米,行駛速度為1~2公里/小時,可翻越30°的坡,電源采用太陽電池陣列+蓄電池,在月夜期間,通過釙-210放射性同位元素加熱器保溫。
其不同之處是:月球車1號的質量為756千克,裝有2副天線、4臺攝像機、月壤探測器、X射線光譜儀、X射線望遠鏡、宇宙射線探測器和激光設備等科學儀器,在月面行駛了10.5公里,工作了10個月,后由于能源不足停止工作;月球車2號的質量為840千克,裝有3臺攝像機、月壤探測器、太陽X射線實驗儀器、天體光度測量計、磁力計、輻射計等科學儀器,在月面行駛了37千米,工作了4個月,地面人員可通過月球車2號發回的圖像來指揮其在月面的行走。另外,相比月球車1號,月球車2號在結構上有所改進,運動速度有所提高,攝像性能有所改善,活動范圍大幅增加。
月球車1號拍攝了20000多張照片,對500個地點進行了土壤物理測試,對25個地點進行了土壤化學分析,總考察面積接近8萬平方米2。此外,它還收集了大量月面輻射數據。月球車2號拍攝并發回了86張全景照片、8萬多張電視圖片。
美國月球車
1971年7月—1972年12月,美國先后發射了阿波羅15號、16號和17號載人登月飛船,它們各自裝有一輛折疊式載人月球車,并且基本相同,均可在月面低重力、真空環境中行駛,從而擴大了航天員的艙外活動范圍。
每輛阿波羅月球車質量約210千克,長3米,軸距2.3米,高1.1米,有4個輪子(每個輪子各由一臺發動機驅動,靠蓄電池提供動力,輪胎在-100°C低溫下仍可保持彈性),電源采用銀鋅氫氧化鉀一次性電池,行駛速度為10~12公里/小時,能攜帶約490千克的有效載荷。車上裝有2個并排的可折疊座位,每個座位有可調節的踏板和安全帶。車前端桅桿上裝有大型網狀碟型天線。航天員通過位于兩個座位之間的T形手動控制器來控制漫游車。手柄前部有一個控制與顯示模塊,顯示當前的速度、方向、電源和溫度情況。
▲日本正在研制的月女神2號將使用月球車
其最高時速可達16公里,航天員坐在里面駕駛著它在月球表面巡游,以車代步,爬越障礙,翻越溝壑,對山脈、峽谷和火山口進行了考察,并把激動人心的彩色圖像傳回地面。
“阿波羅15號”的月球車總共行駛了27.76公里,總時間為3小時2分鐘,最長單次行駛距離為12.47公里,離開登月艙的最長距離為5公里,收集了約77千克月球樣品。
“阿波羅16號”的月球車總共行駛了26.55公里,總時間為3小時26分鐘,最長單次行駛距離為11.59公里,離開登月艙的最長距離為4.5公里,收集了約96千克月球樣品。
“阿波羅17號”的月球車總共行駛了35.89公里,總時間為4小時26分鐘,最長單次行駛距離為20.12公里,離開登月艙的最長距離為7.6公里,收集了111千克月球樣品。在阿波羅17號任務中,由于月球車和航天服的可靠性增加,緩解了月球車行駛距離的局限,所以航天員駕駛月球車行駛的距離最長。
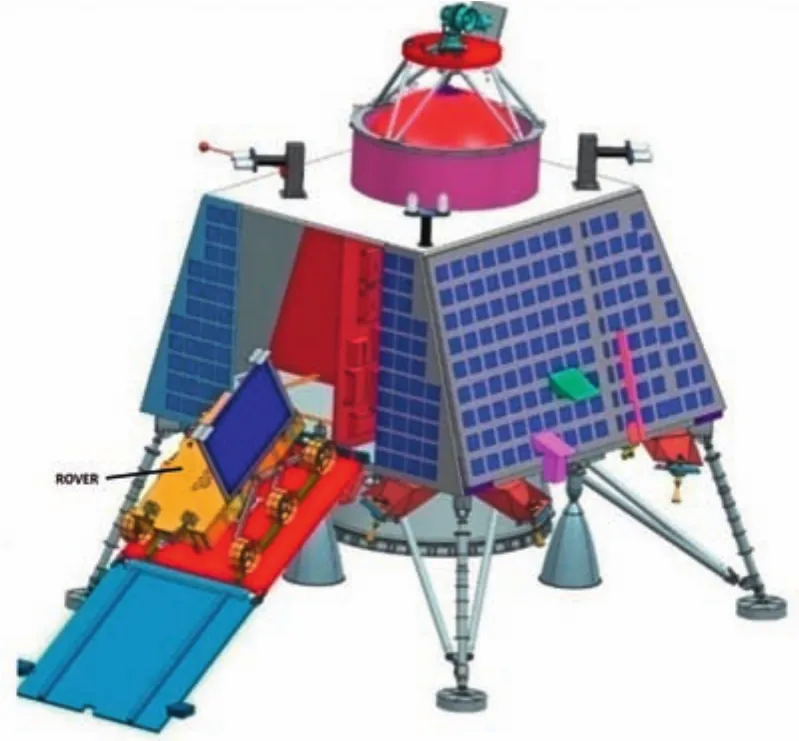
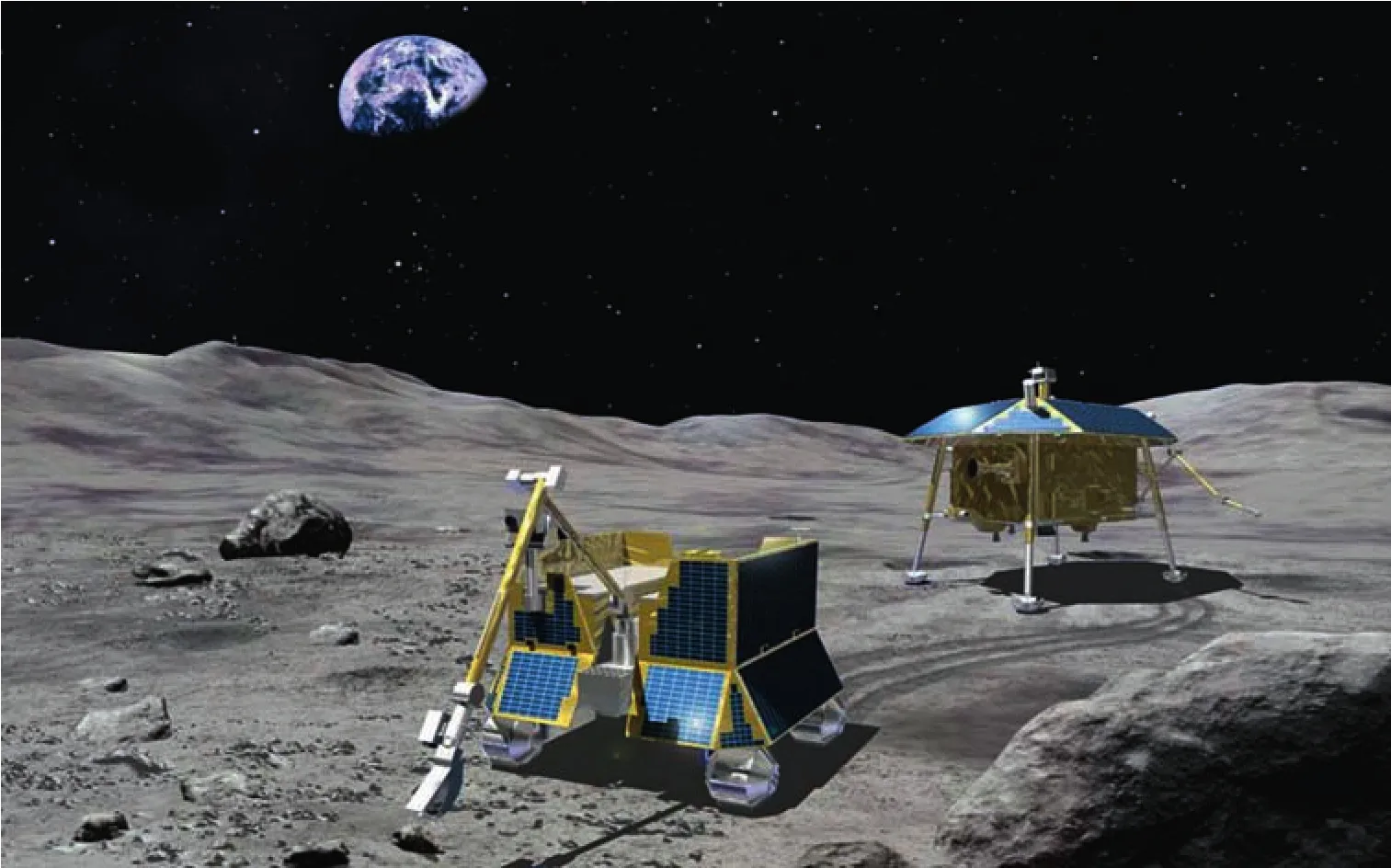
▲ 印度月船2號的著陸器和巡視器
航天員使用月球車時會受到顆粒非常細小的月球塵埃影響。月球塵埃會使軸承、齒輪和密封的其他機械結構產生磨損。另外,在月球車行駛時,從車輪下噴濺出來的塵埃數量巨大高度超過2米,對航天員執行巡視任務產生了一定影響。
中國月球車

▲ 蘇聯月球車1號輪子特寫

▲ 美國測試一款擁有全新電池系統的小型月球車,原計劃于2020年在重返月球中投入使用
2013年12月2日、2018年12月8日,我國先后用長征三號乙運載火箭在西昌衛星發射中心成功發射了嫦娥三號、四號月球探測器。“嫦娥三號”在月球正面的虹灣區軟著陸,“嫦娥四號”在月球背面的艾特肯盆地軟著陸。
嫦娥三號、四號月球探測器分別攜帶的玉兔號和玉兔二號月球車,在外形、重量等方面基本一樣,但因為著陸環境和科學目標不太一樣,所以在功能和有效載荷方面有些改變。
“玉兔號”和“玉兔二號”都用于在月面巡視考察、收集和分析樣品。它們均長1.5米,寬1米,高1.1米,設計壽命為3個月,采用6輪主副搖臂懸架的移動構形,可6輪獨立驅動,4輪獨立轉向,具有爬20°坡、越20厘米高障礙的自主越障和避障,移動速度最快為200米/小時。
由于“玉兔二號”是在月球背面地形崎嶇不平區域進行巡視探測,所以針對月球背面復雜的地形條件、中繼通信新的需求、極大的溫差和科學目標的實際需要等因素,在“玉兔號”的基礎上對玉兔二號月球車進行了適應性更改和有效載荷配置調整,對運動安全、能源供給、科學探測和測控通信等方面均做了特殊的設計。例如,盡量減少電纜裸露在外的面積,以減少電纜的故障風險;在軟件上也進行了系統升級,從而更好地應對各種突發狀況;還使其在自主休眠,自主地應對光照的遮擋,自主避障能力等方面都有明顯提高。
與“玉兔號”相比,“玉兔二號”更輕盈、更自主、更健壯、更可靠。例如;玉兔號月球車攜帶了全景相機、測月雷達、紅外成像光譜儀、粒子激發X射線譜儀等科學探測儀器進行巡視探測。“玉兔二號”上仍裝有全景相機、測月雷達、紅外成像光譜儀,但增加了瑞典的中性原子探測儀,去掉了“玉兔號”的粒子激發X射線譜儀。因此,玉兔二號月球車也就不需要機器臂了,從而輕了2千克。“玉兔號”重137千克,“玉兔二號”重135千克,是世界探月史上最輕的月球車。
“玉兔號”在月夜期間處于休眠狀態,月晝來臨時自主喚醒,但喚醒后需要地面進行相關的系統設置才能進入安全的工作狀態。“玉兔二號”可根據光照條件,自主地進入休眠狀態,喚醒后也可以自主設置進入穩定的工作狀態。
“玉兔號”在虹灣區上行走了114米后突然不能動了,出現了機構控制異常。針對這一問題,“玉兔二號”改進了各種走線的布局,采取了故障隔離設計,因此更健壯,應付困難的能力更強。

▲ 在未來的月球基地中,航天員乘坐帶有增壓艙的月球車在月球上活動
與同類的蘇聯無人月球探測車相比,中國無人月球探測車的特點明顯,小而精。比如,蘇聯月球車1號、2號質量分別為756千克、840千克,而玉兔號和玉兔二號月球車質量分別為137千克、135千克;每輛蘇聯月球車有8個輪子,而每輛中國月球車有6個輪子;蘇聯月球車與中國月球車裝的科學探測儀器、運行地點也不同,后者更先進。其中“玉兔號”上裝的測月雷達是在世界月球探測器上首次使用,“玉兔二號”則是世界首個運行在月球背面的月球車。
未來的前景
月球車可采用腿式、輪式、跳躍式、翻滾式和履帶式等,其中輪式具有運動速度快的優點,效率最高,所以全球已發射的7個月球巡視探測器都為輪式。日本即將發射的“月女神2號”和印度將發射的“月船2號”,都攜帶了輪式月球車。
在這幾類月球車中,輪式的越野性能不太強,適應能力最差;而腿式的適應能力最強,但其效率最低。隨著月球車逐漸采用6輪搖臂—轉向架式懸掛系統底盤結構,輪式月球車的越野能力大大增強,能與腿式月球車相媲美。
現在,結合腿式和輪式月球車各自的優點,一些國家已開始研制輪腿式月球車。它融合了腿式的地形適應能力和輪式高速高效的優點,作業范圍大,同時具有優越的越障避障能力,對復雜月球表面環境適應性強,但缺點是結構與控制復雜。
跳躍式、翻滾式和履帶式探測器可適應更復雜的地形。2018年9月21日,日本隼鳥2號就把兩臺跳躍式著陸探測器投放到龍宮小行星上。此技術也可移植到月球車上。
未來的月球車將朝著在月面工作更長時間、行駛更長距離、適應更復雜的環境等方面發展,并具有質量和尺寸最小化、有效地利用和傳輸能源、機動能力更強、航天員安全更高、應用范圍更廣、成本更低等特點。為此,需采用模塊化設計和國際合作,以滿足多種需求。