“隼鳥2號”上連蹦帶跳的漫游器
2019-04-09 02:36:58遲惑
太空探索 2019年2期
關鍵詞:質量
文/遲惑
在我們的印象里,外星漫游車應當是那種裝著6個輪子和升降式光電塔,在外星球布滿了巖石的粗糙表面上緩緩行進的小車子。但是隼鳥2號探測器所攜帶的漫游器卻是蹦著走的。這是不是有點搞笑?
然而這是技術上正確的選擇。龍宮小行星的質量比月球還要小很多。物體在這里不會得到足夠的引力,任何輪子都不能保證牢固抓地。而引力小能帶來另外一個好處,彈跳力很小的設備就能蹦得很遠,所以,還不如用蹦跳機構來實現漫游器的運動。
蹦跳的彌涅爾瓦
早在“隼鳥1號”計劃期間,就攜帶了一個小型的蹦跳漫游器前往糸川小行星。這個漫游器名叫“微納實驗型小行星機器人”,英文簡寫作MINERVA,正好是希臘神話里智慧女神彌涅爾瓦的名字。不過這臺機器人扔下去就失聯了,只傳回了一張“隼鳥1號”太陽能電池的照片就杳無音信。
日本宇宙與航空開發機構(JAXA)的科研人員檢查有關數據之后,發現這只是設計制造不完善的結果,總體方案還是行得通的。因此在“隼鳥2號”上,JAXA一口氣裝了3臺第二代“微納實驗型小行星機器人”(MINERVA-II),分別是兩臺日本空間科學研究所與日本會津大學聯合研制的MINERVA-II-1,一臺日本東北大學、東京電機大學、大阪大學、山形大學和東京理科大學聯合研制的MINERVA-II-2。這就是我們在前文中提到的圓柱形漫游器。
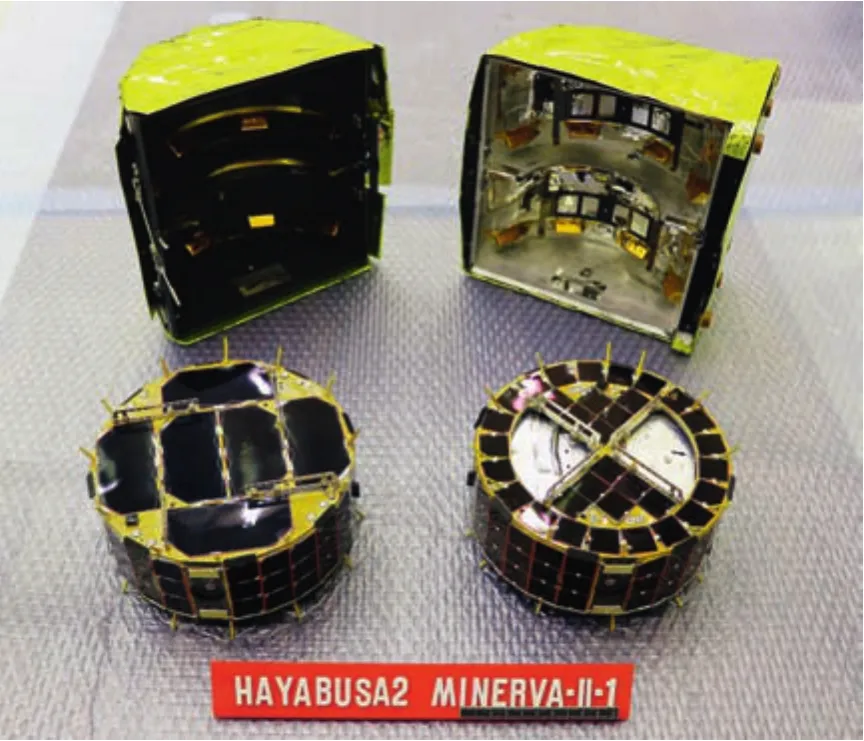
▲ MINERVA-II-1漫游器特寫
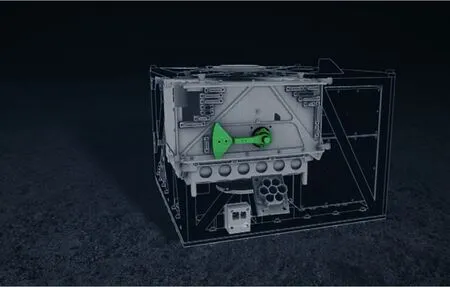
▲ 移動式小行星表面探測器的內部結構,綠色的就是擺錘
2018年9月 22日,MINERVAII1的兩臺探測器從60米高度——“龍宮”引力很小,不會摔壞——被扔到了這顆小行星表面。在下降過程中,MINERVA-II-1上的相機發回了好幾張充滿動感的照片。降落到“龍宮”表面之后,MINERVA-II-1會啟動一種叫做“扭矩器”的設備。“扭矩器”實際上是一個轉動慣量比較大的電機。根據角動量守恒的原理,當物體內部的某個部分產生了角動量,其他部分就會產生相反的角動量。在這部分角動量的驅動下,MINERVA-II-1的底板會對星球表面產生反作用力,把自己彈起來。底板是一個能低速旋轉的圓盤,“扭矩器”就裝在上面。通過調整圓盤的角度,就可以讓MINERVA-II-1向不同的方向蹦跳,然后自由落體降落在另一個位置。通過調節“扭矩器”的磁場強度,可以改變彈跳的速度,最大可以達到每秒9厘米。但是絕不能超過“龍宮”的逃逸速度,否則MINERVA-II-1就會跳進宇宙里回不來了。這種蹦跳方式很難精確控制,但是考慮到“龍宮”是一顆陌生的星球,處處是未知,落到哪里都可以獲得科學成果,不精確也是可以接受的。
兩只MINERVA-II-1漫游器及其容器總質量為3.3千克,容器尺寸22.5厘米×22.5厘米×20.5厘米。單個MINERVA-II-1漫游器質量為1.1千克,直徑18厘米,高7厘米。每個漫游器上攜帶了一臺廣角相機、一臺立體相機、一臺溫度傳感器和光電二極管,以及相應的姿態敏感器件。
MINERVA-II-2的體積要比MINERVA-II-1大一些,達到15厘米×16厘米,質量卻只有1千克。它在宇宙飛行期間同樣收納在一個容器里,容器尺寸為17.5厘米×17.5厘米×20.5厘米。它所攜帶的儀器類型和MINERVA-II-1基本相同。
3臺MINERVA-II漫游器的側面和頂面都貼有太陽電池,最大功率只有2瓦。它們的內部還裝有蓄電池,但只能工作幾分鐘。如果只是給計算機和傳感器供電,太陽電池的功率還是夠用的,但在實施跳躍或者向母星發射信號的時候,就必須要動用電池里的電力。
只掄一次的MASCOT
除此之外,“隼鳥2號”上還有一臺法國航天局和德國宇航中心聯合研制的“移動式小行星表面探測器”(MASCOT)。
MASCOT的運動方式腦洞更大。它是一個四四方方的盒子,尺寸30厘米×30厘米×20厘米,質量11千克。在它的內部,裝著可見光相機、紅外波譜儀、磁力計和近紅外高光譜顯微鏡。這四件科學儀器加起來的質量只有3千克,其他8千克中,除了結構框架,就是運動機構了。2018年10月2日,MASCOT從“隼鳥2號”上沿著一個傾斜的坡道滑出,掉落在“龍宮”上。MASCOT啟動各個方向上的敏感器,首先判明自己的姿態,然后開始翻跟頭。在它的內部,裝著一個能轉動的擺錘。當它轉動起來,就會把自己“掄”出去。
然而MASCOT并不打算在“龍宮”表面來回打滾,它沒有太陽能電池,只能靠自己攜帶的電池工作,而且設計續航時間長達12個小時,所以沒有多少電力可以用來運動。它只“掄”自己一次,只要恢復到設計的姿態,讓所攜帶的科學儀器能正常工作,就再也不動了。為了一次就掄到位,擺錘裝在了盡量遠離總體重心的位置,這樣就能用盡量少的能量實現有效翻滾。
目前這四臺儀器都已經在“龍宮”表面正常工作,為我們發回了相當多有價值的信息。
眼下,“隼鳥2號”還在繞著“龍宮”飛行拍攝,炮打小行星的歷史性一刻還沒有到來。這也可以算是2019年航天領域一件值得期待的事情了。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54