基于RTK的南昌城市房產控制測量研究
2019-04-10 07:01:04熊國文雷琴琴
科技資訊 2019年35期
熊國文 雷琴琴
摘 ?要:房產圖控制測量是城市房產圖基礎測量的工作之一。傳統的方法一般采用導線測量,隨著全球衛星定位技術(GPS)的飛速發展,它以高效率、高精度等優點,迅速在城市控制測量中已被廣泛采用。該文以實時動態技術在城市房產圖控制測量中的應用為研究對象,詳細分析了RTK城市房產圖控制測量的步驟、流程和方法。
關鍵詞:實時動態技術 ?城市控制測量 ?GPS ?工程案例
中圖分類號:P228 ? ? ? ? ? ? ? ?文獻標識碼:A 文章編號:1672-3791(2019)12(b)-0045-02
房產圖控制測量是城市房產圖測量的基礎性工作。傳統的方法一般采用導線測量,隨著全球衛星定位技術(GPS)的飛速發展,它以高效率、高精度等優點,迅速在城市控制測量中已被廣泛采用。目前GPS實時動態定位技術(RTK測量模式),更是以實時、快速、操作簡單而越來越受到城市測繪單位的青睞。
我們采用Topcon Riper雙頻GPS接收機,運用RTK模式完成了多個控制測量項目,取得了良好的效果。該文主要結合工程實踐,就RTK技術在城市控制測量中的運用談點體會。
1 ?GPS房產平面控制測量作業模式
目前房產平面控制測量主要采用經典靜態相對定位、準動態相對定位、動態相對定位和實時動態測量等方法,實際工作中,可根據作業特點、要求以及設備條件來選用。
1.1 動態定位
動態定位主要應用于精密測定運動目標的軌跡、測定道路中心線、剖面測量等。其要建立1個基準點安置接收機連續跟蹤衛星;流動接收機先在出發點上靜態觀測數分鐘,然后從出發點開始連續運動,按指定的時間間隔自動測定運動載體的實時位置。測得流動站相對于基準點的瞬時點位精度1~2cm。該方法要求同步觀測5顆衛星,其中至少4顆衛星要連續跟蹤;流動點與基準點相距不超過20km。
1.2 實時動態測量
GPS實時動態測量(Real-Time Kinematic)簡稱RTK,是實時處理兩個測站載波相位觀測值的差分方法。具體作業方法是設置GPS基準站一臺,并將一些必要的數據,如坐標系轉換參數、預設精度指標、基準站坐標等輸人GPS手簿,一臺或多臺GPS流動站在若干個待測點上設站;基準站與流動站同時接收衛星信號;同時基準站通過電臺將其觀測值和設站信息一起傳送給流動站;流動站將接收到的來自基準站的數據及GPS觀測數據,組成差分觀測值進行實時處理。
2 ?工程案例1
2.1 工程概況
測區位于南昌市某開發區,控制網布設面積約8km2,設計點位27座,起算點采用位于測區南側、東側約0.8km的J市四等平面控制點各一座,測區北側、西側邊緣四等平面控制點各一座。
2.2 RTK GPS測量
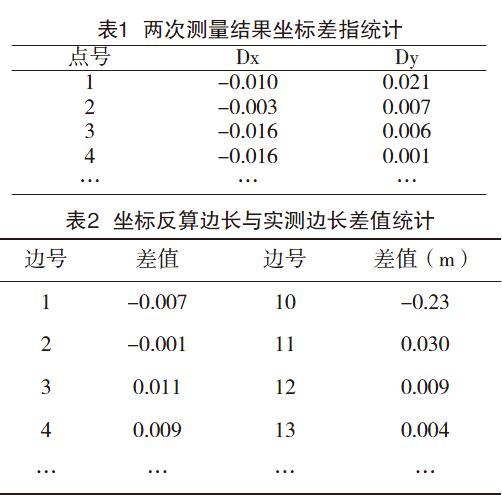
為了保證測量成果的精度及可靠性,我們在測區北側及東側的起算點分別設置基準站,分別采集起算點空間坐標解算坐標系轉換參數;并分別測量待測點平面坐標,然后取2次測量的平均值作為最終成果;2次測量結果的坐標差值統計見表1。
根據上述兩次測量坐差值的統計,可算得兩次測量平均值的點位中誤差為±1.25cm。
2.3 RTK成果的外部檢驗
(1)相鄰點間邊長檢測。
檢測采用TOPCONG TS602全站儀,以2次測量平均值作為實測邊長值,共檢測通視邊17條;實測邊長與RTK測量成果坐標反算所得邊長的差值統計見表2。
根據上述邊長差值統計,可算得相鄰點間邊長中誤差為1.08cm。
(2)采用導線測量方式的坐標檢驗。
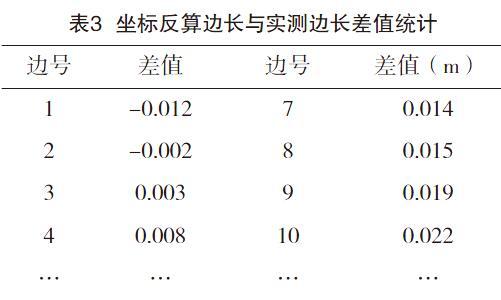
在測區南測選擇待測點6座,按一級導線測量方式觀測,起算點為以上述J市四等平控制點為起算的按GPS靜態方式觀測的城市一級控制點;其測量結果與上述RTK測量成果的坐標差值統計見表3。
根據上述坐標差值的統計,估算RTK測量成果的點位中誤差為±1.22cm。
3 ?工程案例2
該單位2018年6月在南昌市G區約24km2區域布設城市平面控制點43座,采用該區域內分布較均勻的原有GPS四等平面控制點5座為起算點,同樣采用上述雙基準站方式觀測,其中一次利用原GPS網測量時得到的WGS-84坐標建立坐標轉換關系。
根據2次測量坐標差統計,X坐標2次測量最大差值為2.8cm,Y坐標2次測量最大差值為3.3cm,2次測量平均值的點位中誤差為±1.48cm。
該工程中,我們同樣采用TOPCONG TS602全站儀進行邊長檢測,共檢測邊長11條。根據邊長差值統計,估算得相鄰點間邊長中誤差為±1.13cm。
根據對上述工程數據的分析,可知采用該文所述的雙基準站觀測方式,取2次測量平均值的作為最終成果,RTK測量模式完全可替代全站儀導線測量應用于城市一、二級控制測量。
4 ?建議
(1)RTK測量與靜態GPS測量相同,首先得到的是WGS-84坐標,必須通過一定的坐標轉換關系才能得到用戶坐標系坐標,轉換參數的求取精度對測量成果有很大影響,因此在實際應用中首先應注意起算點精度,特別應注意采用一定的方法檢核起算點的相對精度;同時,轉換參數有一定的區域性,它僅適用于起算點所圈定的一定區域,外推精度隨距離增加降低明顯,因此,在實際工作中應盡量選擇能覆蓋整個測區且分布均勻的起算點。
(2)若已知起算點為靜態GPS控制網成果,可利用已有WGS-84坐標及用戶坐標建立坐標轉換關系,這樣可節省采集起算點WGS-84坐標的時間、提高工作效率;但在利用原有成果時應注意所采用的WGS-84坐標應是在同一網平差中得到的,因為它是由單點定位的WGS-84坐標推算得到的,只代表某個特定的坐標對應關系。
(3)基準站應選擇位置較高的點位,這樣可明顯擴大流動站作業范圍,但根據筆者對多個工程成果的統計分析,基準站與流動站間的距離對測量成有一定的影響,當流動站與基準站間的距離達到5~6km時,2次測得的坐標差值及相鄰點間距離與全站儀邊長測量的成果差值超過5cm的明顯增多;筆者建議在采用RTK技術進行控制測量時,為保證成果的精度及可靠性,流動站的作業半徑應控制在5km以內。
(4)根據上述第一、第三點,在采用RTK方式進行較大區域控制測量時可將測區劃分成若干個工作區;各工作區的劃分應有一定的交叉,觀測時應進行相互檢核;也可以采用兩次工作區劃分不同的方式進行觀測。
5 ?結語
利用RTK技術進行城市控制測量操作靈活、簡單,同時減少了大量的觀測數據后處理工作,大大提高了工作效率,徹底改變了城市控制測量的作業模式;但在實際工作中應充分認識這一技術的特點及其與傳統測量模式的區別,設法提高測量成果的可靠性。
參考文獻
[1] 馬勇.基于改進的RTK測量分析[J].測繪與空間地理信息,2019(6):55-59.
[2] 文述生.利用CORS-RTK測量方法處理坐標差分的可行性分析與建議[J].測繪技術裝備,2019(6):33-35.
[3] 王大維.北斗RTK測量系統在礦山測量中的應用分析[J].智能城市,2018(12):76-78.